





Dawid2379
-
Postów
34 -
Rejestracja
-
Ostatnia wizyta
Odpowiedzi opublikowane przez Dawid2379
-
-
Mam radio Graupnera MZ-18 oraz odbiornik GR-24.
Odbiornik ze sterownikiem drona jest połączony przez S.Bus (tutaj Sumo) jednym przewodem.
Potrzebuje jednego kanału aby sterować osia pitch w gimbalu, nie wiem czy da się tak ustawić odbiornik aby miał ten port 8 jako SUMO i dodatkowo jedno wyjście na sterowanie gimbalem. Wiem że są aparatury i odbiorniki ze da się to podzielić ale czy w Graupnerze? W instrukcji nic nie mogę znaleźć.
Jakieś pomysły? Ma ktoś jakąś wiedzę na ten temat? W innym przypadku będę musiał wrócić do standardowego podłączenia odbiornika ze sterownikiem ...
Na pewno nie ma możliwości wykorzystania głównego sterownika(Eagle Vector Tree) do tego celu, czy jego wyjścia Aux, jest to możliwe tylko w Fixed Wing.
-
Dzięki ta zmiana też pomogła, głównym powodem było to, że kabelki od kamery dawały mały opór( w sensie że były naciągnięte przy mocnym wychyle osi PITCH). Pozdrawiam.
-
Witam.
Jeszcze ani razu nie udało mi się dobrze wyeliminować dobrze drgań z silników ze śmigłami na tych silniczkach:
http://www.hobbyking.com/hobbyking/store/__28420__2213N_800Kv_Brushless_Motor_UK_Warehouse_.html
Już próbowałem na trzech rodzajach adapterach ale nic z tego, zawsze coś krzywo się kreci.
Chciałbym zamienić silniki na Emax MT2213 935kV:
Te silniki które mam maja bardzo zbliżone parametry do tych które chciałbym kupić.
Wdaje mi się że będzie lepiej ze względu na mocowanie śmigieł (przede wszystkim dlatego że są nisko zamocowane)
Warto kupować czy nie?
Chyba że macie jakieś inne propozycje??
Quad - rama własna
waga ok 1100-1200g
pakiet 3s 2700mAh 25C
smigła 10x4.5
Silniki chcialbym aby miały mniej wiecej takie parametry:
-waga - ok 50g
-thrust ok 800g
-max 12A
Najważniejsze w tym wszystkim mocowanie prop., małe drgania, z góry dziękuję

-
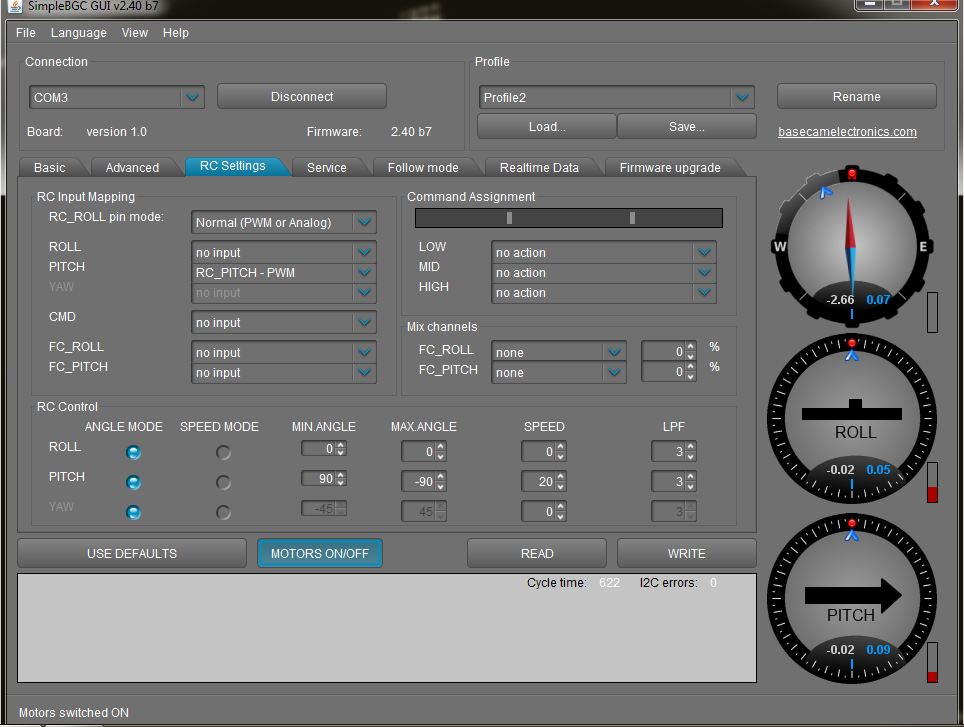
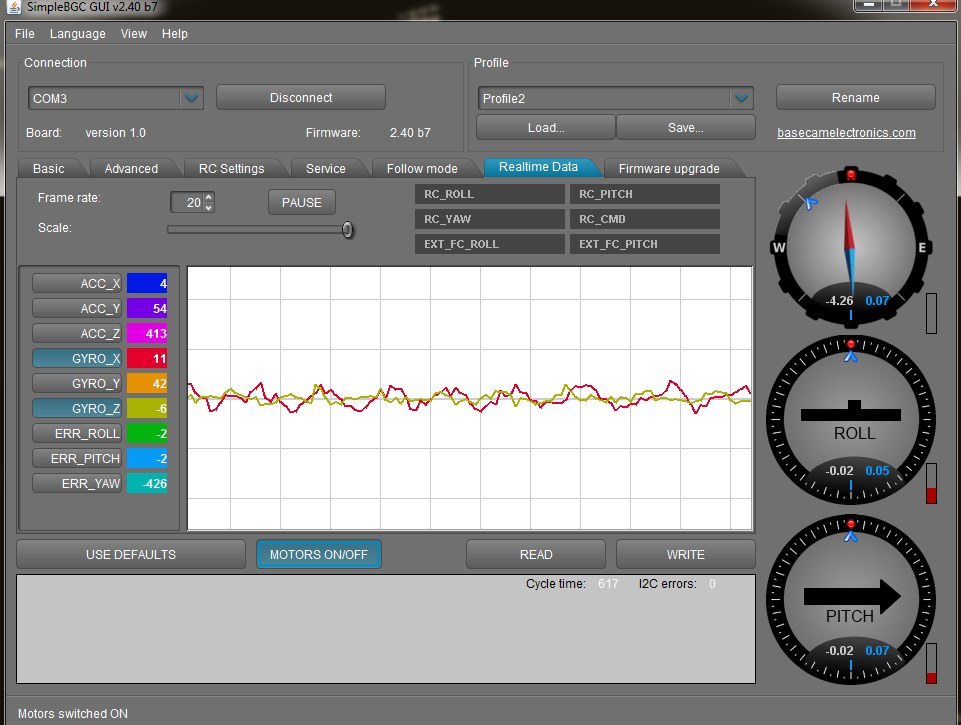
Jak w temacie, gimbal (tylko na PITCH) zaczyna mocno drgać i nie chce się stabilizować powyżej ok 40 st przechyłu dronem w przód i tył. Nie wiem co to może być, większość ustawień próbowałem zmieniać na różne sposoby.
Sterownik to Mini alexmos 2 axis BGC 3.5 gimbal controller
Silniki: 1806 BGM motor
Miałem troszkę problemów z tym sterownikiem, pierwszy się spalił wraz z silnikiem. okazało się że jak się podłączy kabel usb do komputera a nie podłączy zasilania sterownika płytka się grzeje i zostaje uszkodzona, co jest dziwne bo żadnej takiej informacji nie znalazłem w instrukcji, nowa płytka zrobiła się dość gorąca przy pierwszym podłączeniu, ale wyglądało na to że wszystko jest ok, bo gimbal działał, ale teraz mam problem z tym co widać na filmie:
-
Już mam problem z głowy, masę lipo od nadajnika należało podpiąć jak najbliżej masy kamerki, zero pasów i zakłóceń, na krótkim dystansie.
-
Więc tak, osobno monitor i aparatura nie robią żadnej różnicy.
Zmieniłem miejsce nadajnika, bo przewody zasilające szły wzdłuż i przy przewodach zasilających sterownik silnika, próbowałem antena skierowana do góry i do dołu ale nic to nie dało.
Byłem w sklepie po elementy na filtr do nadajnika video ale nie maja cewki wiec wlutowałem tylko diodę i kondensator w nadziei że to chociaż pomoże ale efekt ten sam. Nie wiem czy zamawiać oryginalny gotowy moduł filtra czy nie zamawiać może inny nadajnik.... a ten sprzedać...
Zmieniłem jeszcze antenki na oryginalne, bo i tak daleko nie polecę.
Co zauważyłem to zakłócenia występują głównie po uruchomieniu silników, im wyższe obroty tym większe pasy co widać na filmie:
EDIT:
Wlutowałem sklepowy odkłócacz i nic z tego nie wyszło....
Nie wiem może jakieś ekranowanie przewodów?
Jak dla mnie to pole magnetyczne zakłóca przewód video albo sam nadajnik, brak już pomysłów, boję się że kupie nowy nadajnik i nic to nie zmieni.
Ma ktoś jeszcze jakieś pomysły?
-
Też o tym myślałem szczerze - zakłócenia z aparatury, choć producent monitora zapewnia że nie, teraz mam monitor zamontowany na aparaturze, antenka od apki tuż pod monitorem, może w tym tkwi problem muszę sprawdzić.
-
No właśnie ja nie mogę zasilić OSD osobno, ale będę kombinował z ustawieniem anteny w dronie, oraz z filtrami, jutro skoczę do sklepu i jeszcze zrobię na szybko filtr dla nadajnika, zobaczymy co z tego wyniknie.
Co do anteny w pionie w odbiorniku to ciężka sprawa, jest zamontowana w monitorku, aby dobrze widzieć obraz, muszę go mieć pod kątem ok 45 st...
-
Właśnie co do anteny przy nadajniku, czy może ona być ustawiona bokiem? Spróbuje też do dołu jak piszesz, przeniosę ja na spód drona i jakieś nóżki jeszcze dorobię.
-
Ja mam nadajnik ts832 ale odbiornik w dv701, do tego zmieniłem antenki na grzybki, kanał mam 38, szczerze nie próbowałem na wszystkich, dzisiaj przyszła mi osobna bateria zaraz podeślę film jak wygląda teraz obraz, musi się tylko wgrać.
Połączyłem masy baterii bezpośrednio cienkim kabelkiem.
Szczerze dalej nie jestem zadowolony, jest lepiej ale są jakby pasy.
Będę chyba musiał jeszcze zastosować filtr.
tak to wygląda:, generalnie jakość wideo słaba bo tak niestety nagrywa dv701, ale oczywiście mobius tez nagrywa;)
-
Dzięki, brzmi ciekawie, to bardzo długo pakiety utrzymują nadajniki, mam nadzieję ze i u mnie sytuacja się poprawi, mimo to poszukam coś poniżej 500mAh i będę doładowywał pakiet częściej, bardziej mi zależy na wadze całości.
Pozdrawiam i jeszcze raz dziękuje;)
-
Będę musiał spróbować w takim razie, myślałem o tym i chciałem tego uniknąć, każdy gram jest istotny.
Nadajnik teoretycznie pobiera 200mA przy 12v(działa od 7,4V).
Jaki najmniejszy pakiet 3s mógłby podtrzymać nadajnik przez 15 min? Bo tyle max lata dron. Kamera zasilana własną baterią.
-
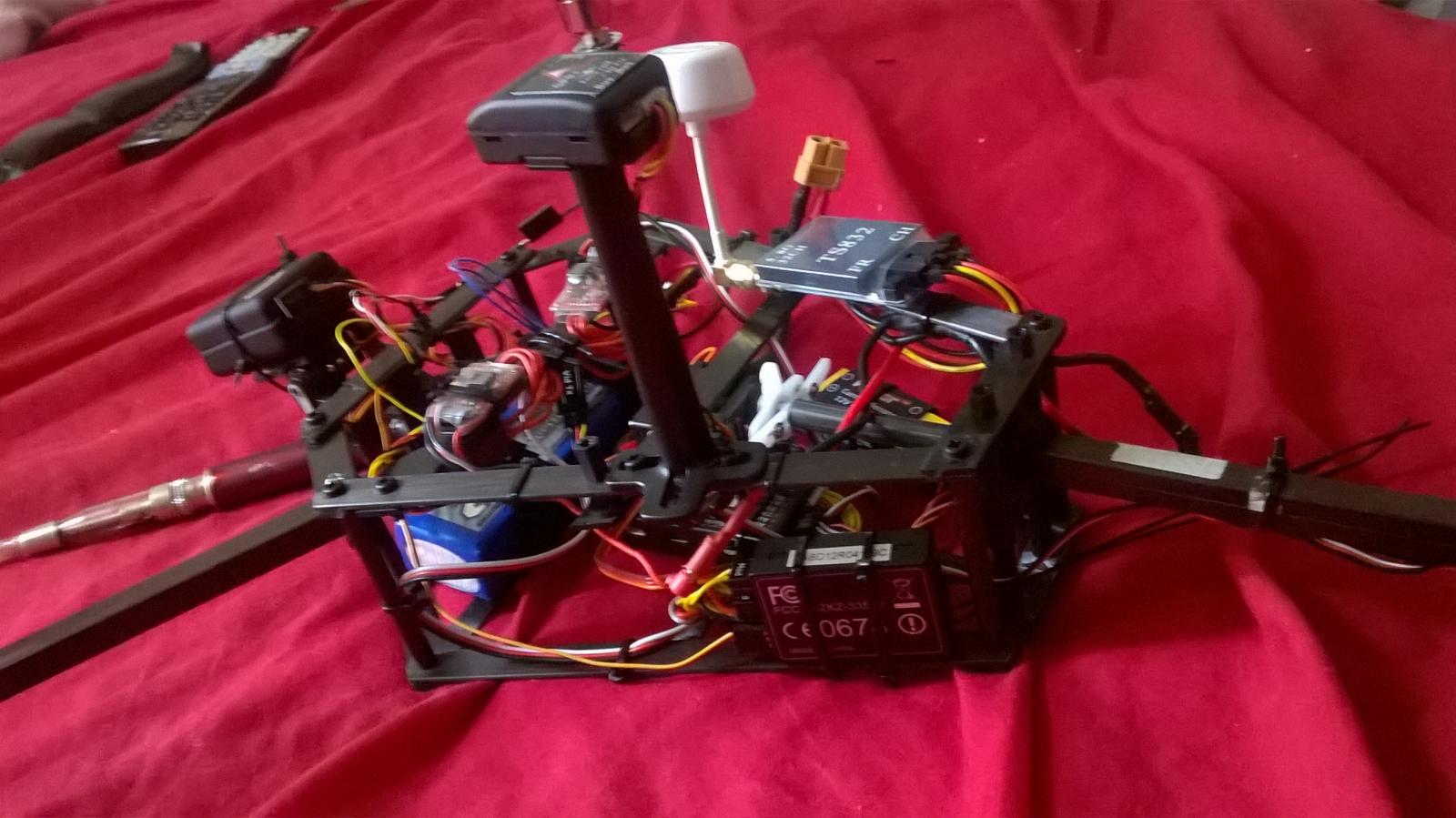
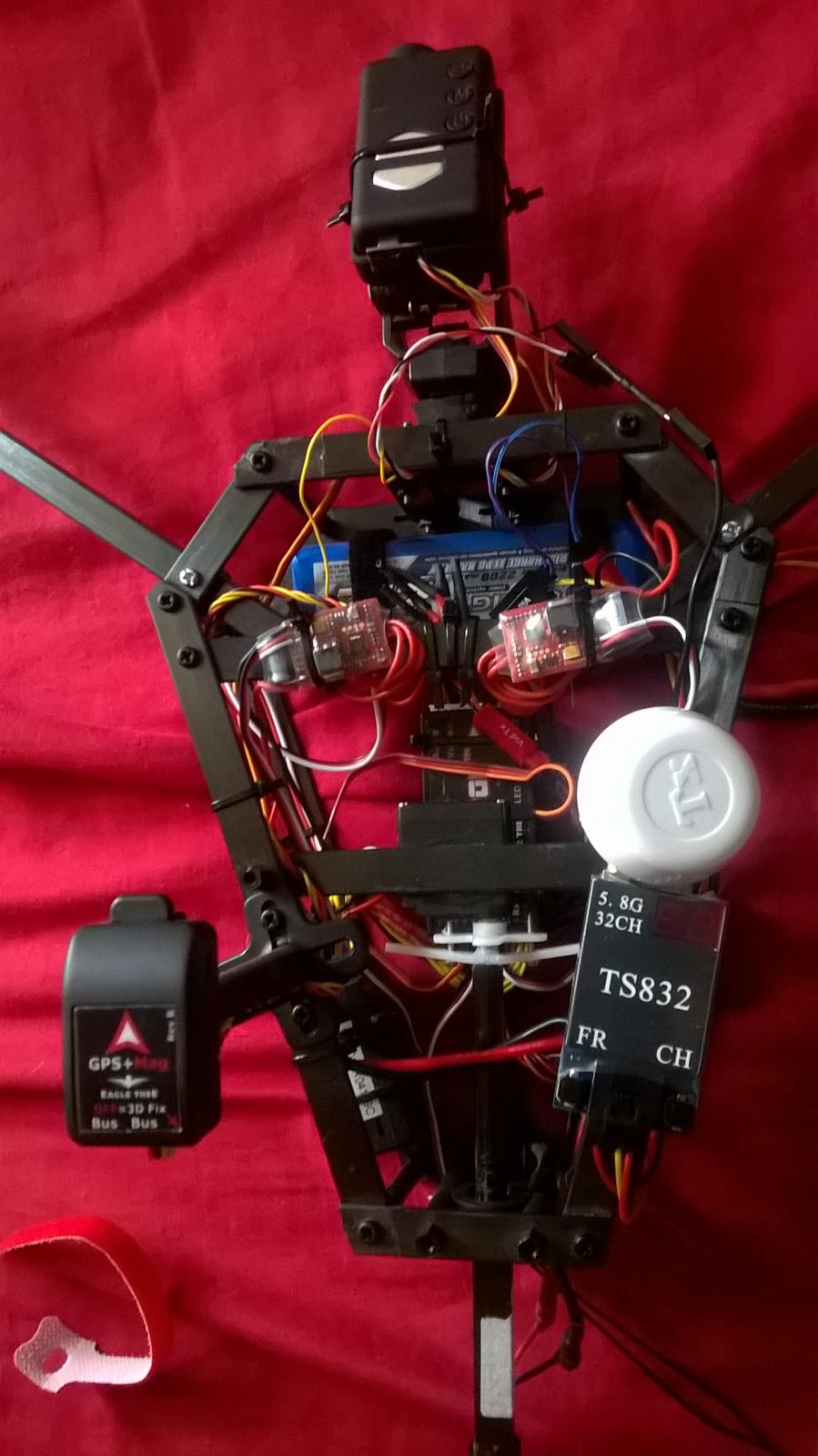
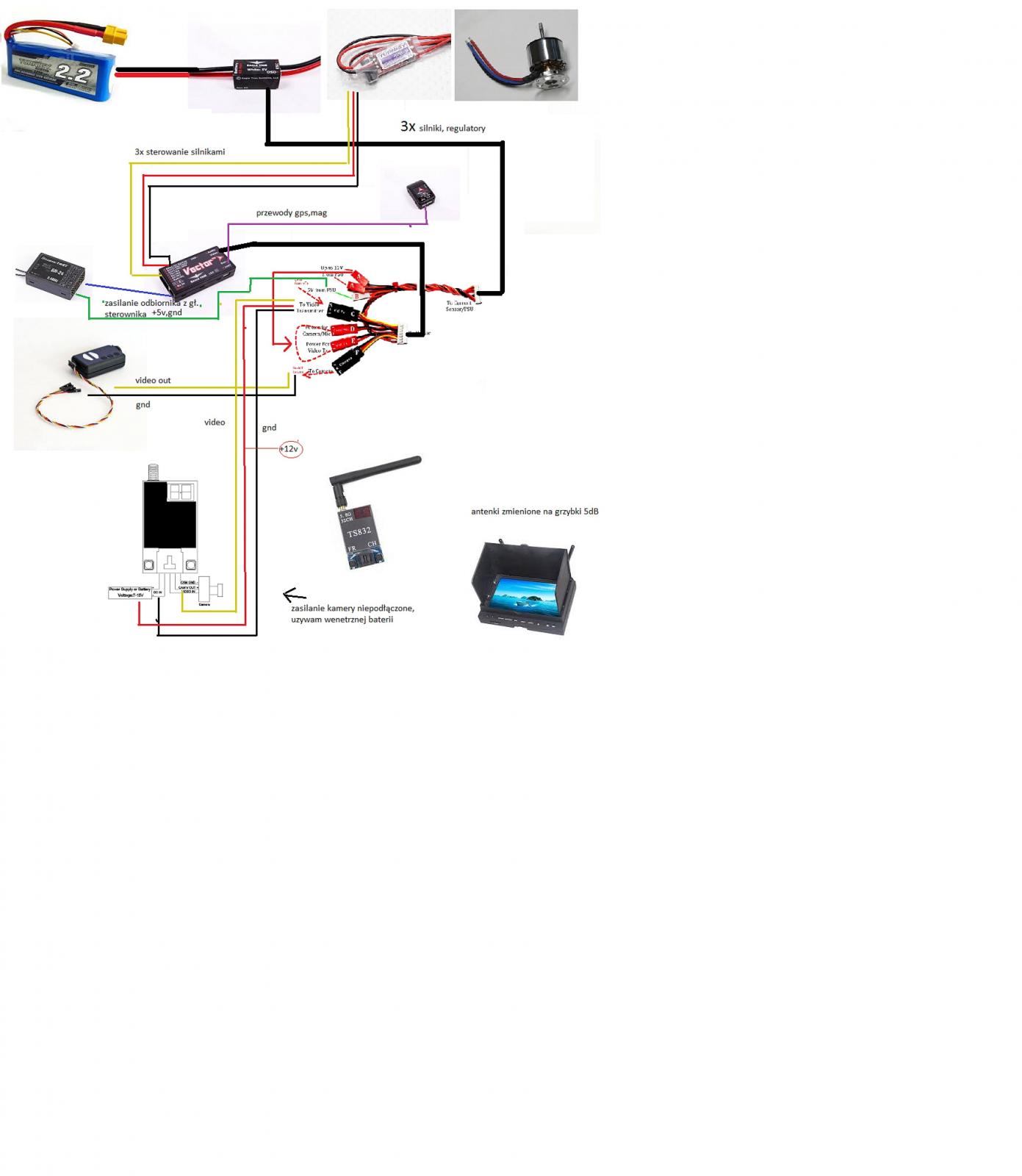
Witam, mam problem z odbiorem video, obraz "załamuje się', pokazują się jakieś pasy, szumy, jednym słowem nie da się latać w dalszym ciągu dalej niż w zasięgu wzroku, jak widać po zdjęciu nadajnik video nie jest słaby, ani jakiś tani, nawet antenki dokupiłem grzybki.
Problem z obrazem występuje tuż po starcie, próbowałem odejść z nadajnikiem kiedy system nie był uzbrojony na jakieś 200m - obraz super.
Kombinowałem też z masą kamery, podpinałem do osd, do minusa nadajnika video i nic. Załączam zdjęcia może ktoś zauważy jakiś błąd w rozmieszczeniu elementów zabawki.
Zrobiłem też w paincie rysunek jak i co jest podpięte może tam jest jakiś błąd. Proszę o wyrozumiałości trochę.
-
No to mnie ta wiadomość ucieszyła, dzięki;)
-
Z tym tez można sobie poradzić, nie muszą być schowane i obok siebie ,bardziej zastanawia mnie czy powodują jakieś zakłócenia w sterowniku bądź odbiorniku?
-
Czy to ze są one umieszczone na ramionach dronów to kwestia techniczna czy po prostu jest tam jej najłatwiej umocować, chciałbym je ulokować w okolicy głównego kontrolera i odbiornika, będzie to miało wpływ na ich pracę ?
-
Oczywiście ma na uwadze innych, nie mam zamiaru latać nad miastem z tym co mam, ani nawet nad wsią czy nad parkiem zapełnionym ludzmi, ostanio latałem w parku, jak się zaczęły dzieciaki zbierać zwinęlem sie do domu, widziałem wczoraj film jak para młoda oberwała w twarze, ale to akurat była wina niedoświadczonego operatora quada. Wiem z jaka potężna siła może uderzyć model nawet o wadze niecałego kilograma spadający z chocby 10 metrów, a co dopiero z ze 100 może zabić.
I wierz mi chciałbym taki zestaw naza, bo jest to konkretny sprzęt z tego co widzę, ale cena......
Jeszcze kilkanaście tyg. odkładania i może zainwestuję, tylko że musiałbym się przesiąść na quada, bo tri nie obsługuje, w ogóle ciężko coś na tri znaleźć z tych najlepszych.
Co do zasięgu to niektóre apki ostrzegają kiedy zanika (wiem wiem to nie jest nic pewnego) ale zawsze jakiś plus i pomoc.
buzer mam wbudowany w KK2.1.5, muszę go tylko podłączyć, możesz nie wierzyć ale latałem bez i czuje po drążkach kiedy bateria pada i jak latałem może z 10 razy ani razu mi nie spadł z powodu pakietu.
Czego nie będe robił z tym wszystkim w przyszłości to wiem jedno aparatura musi być dobra i uniwersalna, może będę chciał coś kiedyś kombinować, nawet po postach widać piszą; kupuj najlepsze na jakie Cie stać, będzie na lata, na wszystko co lata, jeździ czy pływa.
-
Taka jak pisałem, wiedzę mam marną, czyli failsave w copterze to bezsens i nikt tego do copterów nie używa i kropka?
Ja wolałbym żeby odleciał z lekkim wiatrem niż miałyby stanąć silniki i spadłby z 50 m. Myślałem o tym że gdybym leciał np do przodu - nagle brak syg, no i leci dalej prosto ale wypoziomowany, zawsze to większe szanse na uratowanie mojego wynalazku, ja mam tri na najnowsze plytce kk2.1.5 z własną ramą zbudowaną z drewna, a aparatura najtańsza z hk 6ch.
Tani ten kontroler z barometrem i kompasem.
-
latanie dalej niż w zasięgu wzroku to namawianie do łamania prawa
bez fpv chyba?
Pomyślałem, przemyślałem. Bezpieczeństwo pierwsza sprawa.
Jak wygląda taki zestaw który wróci do nogi o którym mowa? jakie koszty? jakie w ogóle są możliwości zabezpieczenia platformy przed upadkiem ?(może kilka propozycji)
Czy jest to wbudowane w główny kontroler lotu czy może też jest możliwość dokupienia takiego osprzętu i podpięcia pod istniejący kontroler lotu?
Wiem jak działa fail safe, myślałem aby ustawić kanały tak aby zawisł a spadające napięcie sprawi że powoli bedzie opadał na ziemię i wtedy nic złego się nie stanie, o ile nie będę latał nam terenem zabudowanym.
Radio odstawie na drugi plan, choć zamarzyło mi sie: Graupner mz18, niby zasięg 4km;)
-
No i weź zdecyduj się na coś
Jak czytam, możliwości jest sporo, telemetria wbudowana w kontroler, osd, albo poprzez radio coś, uważam ze naprawdę trzeba sporo doświadczenia, czasu spędzonego na loty, grzebania w internecie, budowania aby wiedzieć co i jak, co z czym się je i co będzie najlepsze...
Widzisz mogłem od początku o tym myśleć ale jakoś trzeba zacząć, brak wiedzy, napaliłem się na tricopter i póki co, mam co mam, zaś wydawać pieniądze to nie za bardzo, bo tak naprawdę musiałbym wszystko wymienić, ale tłumaczę sobie to tak że nauczę się latać na tym co mam, będę zagłębiał się w temacie i z czasem w miarę możliwości może budował nowe latadło, a teraz mogę ulepszyć tego.Może dalej błądzę ale będe kontynuował, myślę tak: teraz radio, z telemetria, jako jakiekolwiek zabezpieczenie - failsave, a potem transmiter audio video i jakiś wyświetlacz (latać "krótko" a pożniej usprawnić radio na większy zasięg)
Jakie jest kolejne radio o "gwiazdkę" wyżej?
EDIT
o apke juz nie pytam, jest tego strasznie dużo, i dużo informacji, trochę poczytam i wkoncu się na coś zdecyduje, dzięki za pomoc!
-
Witam, wydawało mi się że nie będzie z tym problemu lecz wybór radia i odbiornika to problem(Futaba, Turnigy, FlySky, Graupner,Sanwa itp) zwłaszcza że nie mam dużego doświadczenia i wiedzy, dlatego proszę o wyrozumiałość. Chciałbym zainwestować w aparaturę na kilka lat, ma być dostosowana tylko dla tricoptera, już kilka razy latałem coraz lepiej mi to wychodzi (na apce 6ch. z hobbyking). Chciałbym abyście mi polecili apke z odbiornikiem z podstawową telemetrią (napięcie baterii w dronie, informacje o zasięgu, sygnalizacja dźwiękowa czy wibracyjna - obojętnie) i duuuuuży zasięg (tak na przyszłość jakbym dorobił się googli konkretnej kamery itp)
No i failsave tutaj nie mogę znaleźć informacji na temat systemu faisave który przy utracie komunikacji radio-odbiornik spowoduje stopniowe obniżanie gazu - czy w ogóle coś takiego istnieje? nic nie mogę znaleźć na ten temat - jestem zielony i zastanawiam się czy to nie głupie pytanie, ale liczę na ciut wyrozumiałości.
W co zainwestować? wiem że nie będzie to tani zakup z tymi wymaganiami jak na moja kieszeń.Proszę o propozycje radia i odbiornika ja już sam poczytam i postaram zagłębić się w temat.
No i jak to jest z tym failsave- jest coś takiego czy jest potrzebny jakiś osobny system autopilota?
Pozdrawiam Dawid
-
O, przyzwyczajony do ignorowania kilka dni nie bylem na forum, Wszystko ustawione jak trzeba. Jak się okazało, aby włączyć AUTO LEVEL należy podać na wej. AUX w KK2.0 syg z odbiornika, a że ja mam odbiornik 4-kanałowy to co- attiny13 w programator i kod w C i już mam piaty kanał, podłączyłem i auto-level włączone
(na stałe).Co do latania, tak latałem ale jakieś 10min. nawet fajnie było ale nie to co sobie wyobrażałem, problemem był jeden z silników. ciężko go się obracało - dlatego mi później startował i to jest tez powodem że nie latał idealnie, trochę nim trzepało, zabawa się skończyła jak straciłem zasięg.
Nadajnik niby na 2km a przy 50 m tri spadł w śnieg i po zabawie spalił sie jeden regulator, Pytanie mogę na ogon zastosowac silnik e-maxa cf2822, zamiast tego fabrycznie niedorobionego http://www.hobbyking...?idProduct=8622, różnica w poboże pradu to 3.5A.
-
Na szczęście nic się nie stało, śmigła bardzo mocno zamocowane, ale dostosuje się do rad. Nastepnym razem przeprowadze testy ze śmiglami ale ze znacznej odległości. Testowałem chyba 4 firmware, różne konfiguracje samej płytki KK2.0 to z forum, to z Youtube, nic nie zapewnia stabilnego lotu. Im więcej "szperam" tym bardziej zdaje sobie sprawę że aparatura 4 kanałowa nie wystarczy do tego aby TRI SAM POZIOMOWAŁ SIĘ PO PUSZCZENIU DRĄŻKA DO POZYCJI NEUTRALNEJ, i tutaj chyba jest potrzebny piaty kanał aby wykorzystać AUX oraz akcelerometry. I to chyba będzie ten tryb self level -autopoziomowanie, brnę w dobrym kierunku czy nie? Bo jeśli to kwestia ustawień a akcelerometry powinny działać w trybie normal to będę wniebowzięty, bo inaczej musiałbym kupić lepsza aparature.
Puki co da się latać ale tak że throtle do góry i potem już tri robi co chce
-
Może ktoś mi wytłumaczy dlaczego w większości tricoptery mające płytkę KK2.0 maja wykorzystane wejście AUX, do czego tak naprawde je się stosuje???, może jest to powodem że nie potrafię zapanować nad tri.
Wgrałem starsze firmware na KK2.0 i efekty samoczynnego przyśpieszenia silnika jak na filmie nie ma. Przy v1.4, v1.5 zaczyna sie taki problem, v1.1 v1.2 jest ok chociaż ciężko latać. Musialbym mieć chyba dwa lata doświadczenia:/
Ciekaw jestem czy są typowo firmware pod tri może to by coś zmieniło





Licytacja sterownika Quanum Illuminati32 dla Frania
w Różne
Opublikowano
Witam chciałem wystawić na licytacje sterownik Quanum Illuminati 32
Wszytko dla Frania Marcinkowskiego który potrzebuje aż 9 milionów na leczenie SMA w USA