Piotr_Avatar
-
Postów
10 -
Rejestracja
-
Ostatnia wizyta
-
Zakaz lotów w Światowe Dni Młodzieży 2016
Piotr_Avatar odpowiedział(a) na Piotr_Avatar temat w Południe
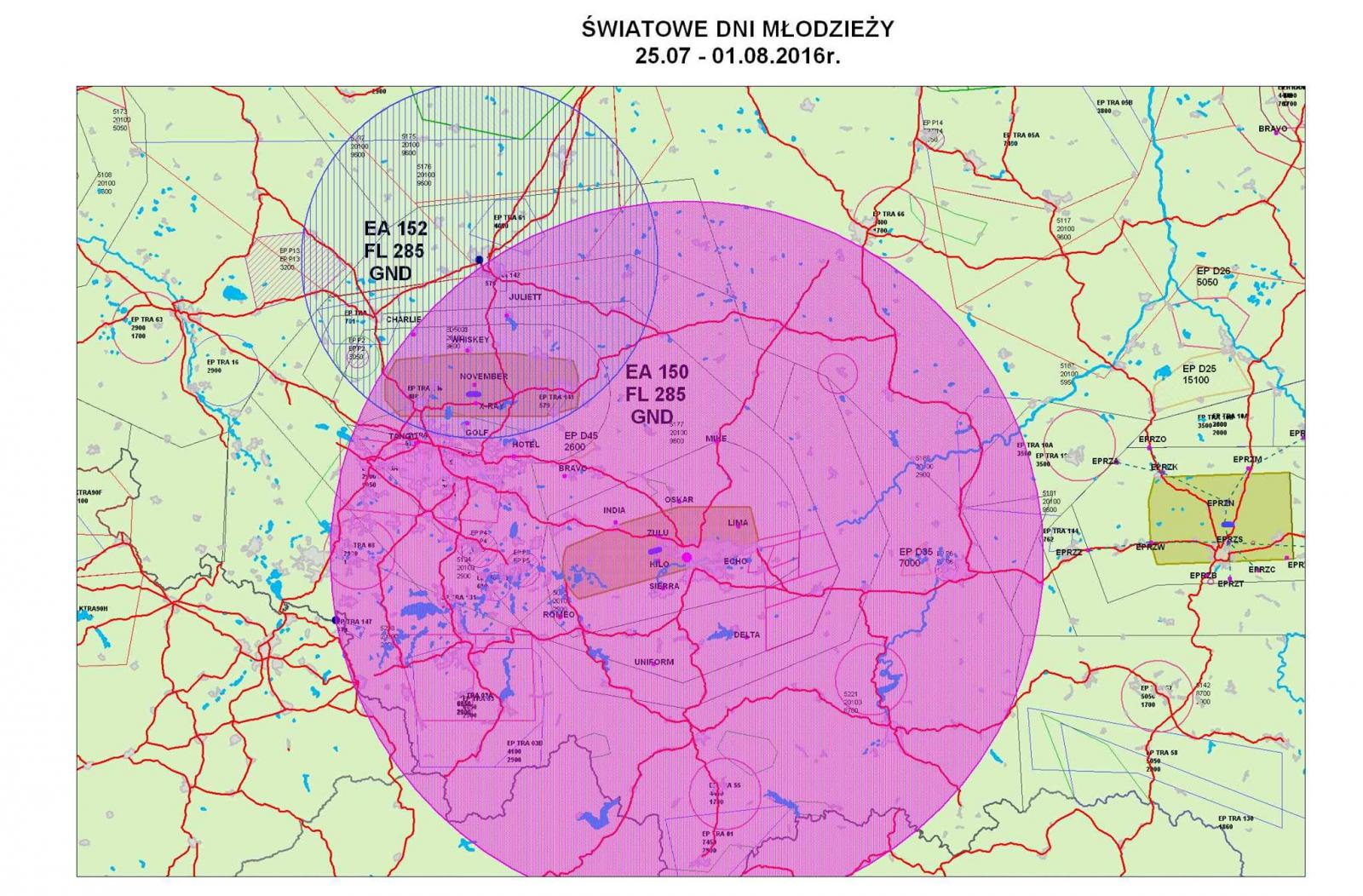
Tak dla ścisłości: zakaz lotu w strefach EA 150 i EA 152 będzie dotyczył wszystkich statków powietrznych, nie tylko BSP. Oczywiście promień 100km to lekka przesada, ktoś chyba nie chciał się w ULCu/PAŻPie zabardzo rozdrabniać. Sprawdzalność tego będzie żadna, bo przecież jak ktoś polata nad swoim podwórkiem z dala od miasta to raczej nikt mu nic nie zrobi. Pomijam już fakt, że żeby wiedzieć o tym zakazie, trzeba na bieżąco śledzić AUP i komunikaty ULC/PAŻP, czego nawet modelarze czy droniarze nie robią, a co dopiero taki biedny pielgrzym z dronem - skąd on ma o tym wiedzieć -
Polecam się zapoznać: http://www.drony-krakow.pl/zakaz-lotow-bsp-promieniu-az-100km-wokol-krakowa. W Światowe Dni Młodzieży, które się odbędą w dniach 25 lipca do 1 sierpnia tego roku, przez tydzień będzie całkowity zakaz lotów od poziomu gruntu GND, wszelkich maszyn latających, w tym modeli RC/dronów. Mapa jest wciąż poglądowa, ale obszar 100km wokół Krakowa jest bardzo realny.

-
Jedna wskazówka: Manta M336 jest w tej cenie co Xiaomi Yi, która uchodzi za porównywalną z GoPro HERO3 a w zdjęciach nawet z HERO4, poza tym podaje obraz FPV podczas filmowania. Jakbyś podmienił tą kamerkę to zyskasz na jakości nagrań a przy okazji możesz zrezygnować z dodatkowej kamery FPV.
-
Walkera 210 mamy również u nas w sklepie (sklepavatar.pl), testowana dobrowolnie przez kilka osób i robi naprawdę dobre wrażenie. Przede wszystkim duży przeskok z Runner'a 250, bo 210-tka działa na 4S i ma naprawdę potężny zapas mocy, można robić spokojnie akrobacje, co przy Runnerze 250 niestety nie było zbyt przyjemne (tam jest 3S i mniej dynamiczna). Co do modelarstwa VS RTF'y - prawda jest również taka, że obecnie mamy modę na tzw. drony utożsamiane głównie z wielowirnikowcami, a te same w sobie niewiele mają z modelarstwa - w zasadzie kupuje się ramę, elektronikę, skręca się, lutuje i zostaje konfiguracja. Z klasycznego modelarstwa samolotowego praktycznie nie ma tu nic. Takie czasy...
-
Pierwszy quadro na ramie Iron Man 650 od Tarota
Piotr_Avatar odpowiedział(a) na Ja-Bo temat w Multikoptery
Moim zdaniem przegiąłeś z silnikami, z tego co widzę jeden waży 220g. Regulatory 20A do takich silników i dużych śmigieł będą pracowały na swojej górnej granicy dopuszczalnego natężenia prądu. Przy doborze pakietu zwróć uwagę jaki ma maksymalny stały i chwilowy prąd rozładowywania. Uchwyt montażowy na GPS do tarota (mocowany na ramię) jest bardzo mało praktyczny - lepiej kupić standardowy wysięgnik do GPS, taką składaną nogę. Do dystrybucji zasilania potrzebujesz jakieś PDB (Power Distribution Boarch) z wbudowanym BEC na 5V. Co do podwozia - łączysz je standardowym kablem serw Y i wpinasz w wolne miejsce w odbiorniku, następnie sterujesz jakimś przełącznikiem - nie potrzeba dodatkowych sterowników. Pozdrawiam! -
Wg polskiego prawa lotniczego póki co cywilne maszyny bezzałogowe mogą mieć MTOM do 25kg więc ten przedział 20-30kg jest tak trochę na granicy, aczkolwiek można zawsze szukać takich konstrukcji zagranicznych. Dodatkowo piszesz, że chodzi Ci o "quadcoptery i hexacopter" do 20kg i potem od 20-30kg. Przy tych wagach sprzętów to próżno szukać quadcopterów - 4 silniki to zbyt mało, żeby unieść taką masę (trzeba by zastosować bardzo mocne silniki elektryczne lub bardzo duże śmigła co jest niepraktyczne z racji rozmiarów i pobieranego prądu). Prędzej hexa, choć to też raczej ten pierwszy przedział, w tym drugim raczej szukałbym octocopterów w układzie klsycznym lub X8, czyli po dwa silniki na ramię. Poza tym szukasz książek, artykułów do obliczeń - moim zdaniem zbyt młoda branża. Może artykułów zagranicznych się doszperasz, ale na książki nie licz. Przy tej ilości zmiennych, które sam eCalc bierze pod uwagę, to będzie naprawdę pracochłonne opisanie wszystkich zależności do obliczeń. Powodzenia!
-
Napisałeś, że "wykonałeś kalibrację GPS" tzn. zrobiłeś to zgodnie z instrukcją zapisując Home Point przed lotem? "Before takeoff, current position of multi-rotor will be saved as home-point by MC automatically when you start the motors for the first time after 6 or more GPS satellites are found (red light blinks once or no blinking) for 10 seconds." http://wiki.dji.com/en/index.php/Naza-M-V2_FailSafe
-
Quadro od podstaw - rama własnej konstrukcji
Piotr_Avatar odpowiedział(a) na KuBuS temat w Multikoptery
Rama 300g ze średnicą ramion 56cm to jeszcze nic strasznego. Śmigła 10" powinny tam wejść, więc jak zmieścisz się ze wszystkim w 1,2-1,5kg to bez problemu polatasz ok. 15 minut. Im lżejszy tym dłużej. Szkoda tylko, że rama nie przewiduje montażu czegoś całkiem od spodu (gimbal, aparat), no ale jak to ma być do rekreacyjnych lotów dla przyjemności to w sumie zbędna rzecz. Co do wymienionych przez Ciebie kontrolerów to z tego co mi wiadomo tylko APM/PixHawk ma możliwość latania po Waypointach (a już na pewno tylko te obsługują Mission Planner;). APMy wciąż dają radę i można je teraz dostać za bardzo rozsądne pieniądze. -
Budowa średniej klasy racer'a 250 to m/w taki koszt jak gotowy Walkera Runner 250 czy nowszy Walkera F210. Więc jeśli chodzi o koszty to zabardzo się nie zaoszczędzi. Jak pisał wyżej Spook to kwestia tego, czy chcesz wyjąć sprzęt z pudełka i pójść polatać, czy wolisz poświęcić trochę (sporo?) czasu na budowę i późniejszą konfigurację. Jeśli weźmiesz się za własny sprzęt to CC3D odpalisz w zasadzie bez problemu, Wizard podczas konfiguracji jest banalny, krok po kroku przeprowadzi Cię przez procedurę. Z kolei z Naze32 niestety może nie pójść tak gładko i będziesz tylko tracił nerwy i zachodził "czemu się nie łączy, czemu nie działa". Teraz nawet do RTFów można dokupić praktycznie każdą część więc to nie jest wielki problem, ale na pewno wiedzę zdobędziesz większą gdy zbudujesz od zera i się trochę pomęczysz .
-
Witam wszystkich serdecznie, Mam na imię Piotr, jestem z Krakowa. Modelarstwem interesuję się od dłuższego czasu, a od ponad roku jestem związany z nim zawodowo poprzez sklep z dronami, który prowadzę (bez reklamy - to w końcu powitalnia . Generalnie jestem zajawiony na tzw. "drony", w większości utożsamiane z wielowirnikowcami. Prócz tego poznaję tajniki druku 3D i testuję różne polskie drukarki. Pozdrawiam serdecznie i do zobaczenia gdzieś w Krakowie (śmietnik, Czyżyny, pod obserwatorium;)