VVigor
-
Postów
57 -
Rejestracja
-
Ostatnia wizyta
-
Odbiornik FrSky XM Plus - jaki moduł nadawczy/aparatura do tego?
VVigor opublikował(a) temat w Nadawanie i odbiór, anteny
Cześć. Zabieram się za składanie racera. To już mój drugi dron, jednak jest on wyposażony w odbiornik RC "FrSky XM Plus ", taki o: https://hobbyking.com/en_us/frsky-xm-plus-micro-ultra-light-16-channel-full-range-s-bus-receiver-standard-version.html Mam aparaturę Turnigy 9x, taką o: https://hobbyking.com/en_us/turnigy-9x-9ch-transmitter-w-module-ia8-receiver-mode-2-afdhs-2a-system.html jednakże z tego co wiem to moduł nadawczy z tego 9x nie zbinduje się z tym odbiornikiem, czy to prawda? Jestem kompletnie zielony w kwestii nadajników/odbiorników RC stąd pytam. Jeśli nie podejdzie i się nie zbindują to czy zmiana modułu nadawczego, coś zmieni? FrSky na pewno współgra z aparaturami Taranis X9D, X9D Plus, X9E, Q X7. Ktoś może polecić jakiś najtańszy moduł nadawczy, który będzie współpracować z tym odbiornikiem i z moim turnigy 9x? -
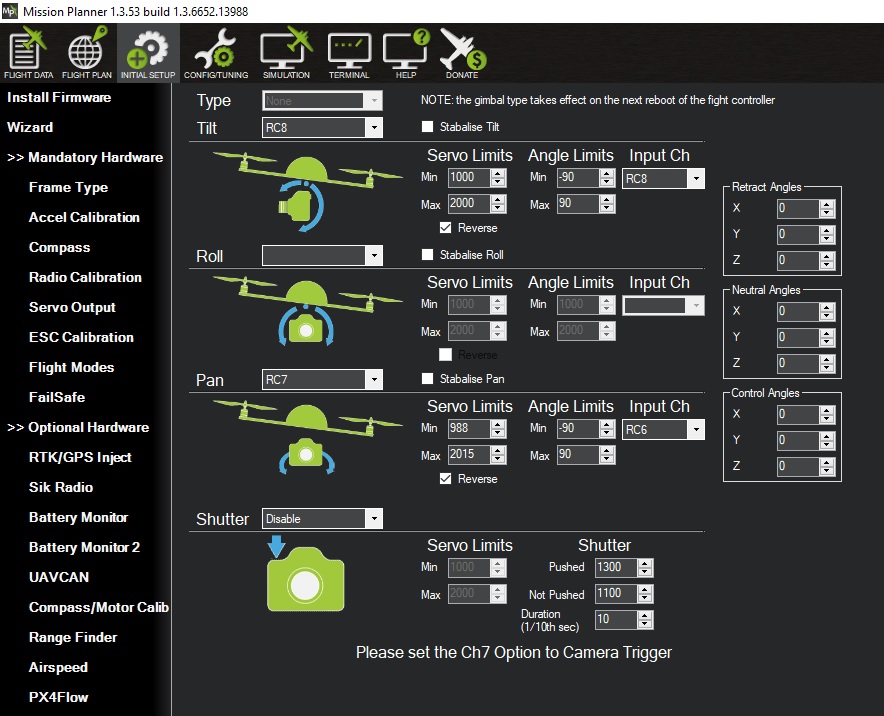
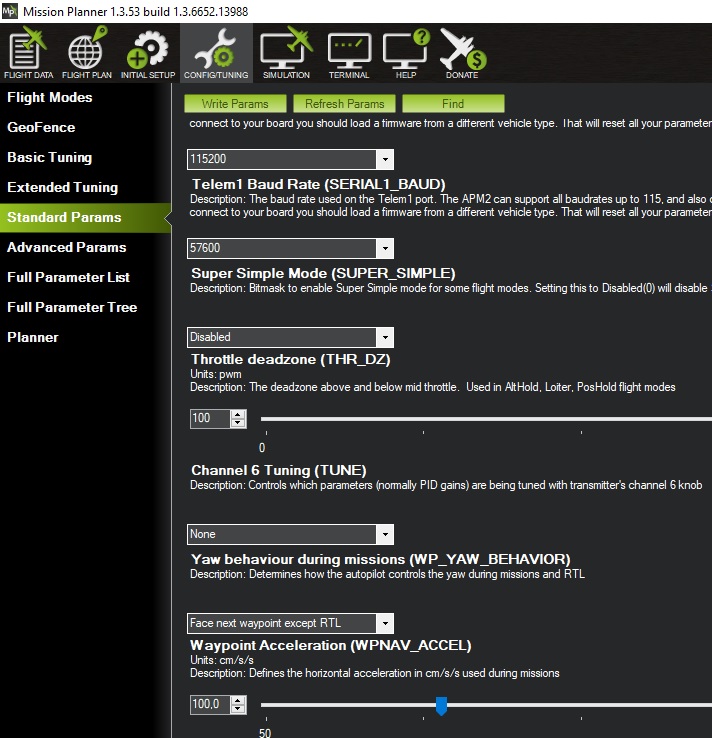
Cześć. Kupiłem nowego gimbala (hakrc) oparty na stormie32 bgc, następca po moim niewydarzonym tarocie t-2d... Podłączyłem klasycznie dwa sterowania, pitch i yaw do mojego APM 2.8, a stamtąd do odbiornika. W MP ustawiłem gimbala w następujący sposób: Mogę teraz za pomocą dwóch potencjometrów określać położenie gimbala w tych dwóch osiach. Jednak takie używanie go daje pewne ograniczenia, więc chciałbym przejść do misji samodzielnych i wklepywania tylko ROI, a w tym czasie obserwować jedynie poczynania koptera. Problem jest jednak taki, że gimbal nie realizuje zadań związanych z ROI. Kopter lata po waypointach, gimbal stara się coś wykombinować, czasem poobraca, czasem patrzy w ogóle nie w to miejsce gdzie powinien... To samo oczywiście dzieje się z opcjami typu circle i follow me. W ustawieniach Storma32 zmieniłem jedynie heartbeat na emit, chociaż nie wiem co to da. Szkoda, że niestety ten poradnik : http://ardupilot.org/copter/docs/common-storm32-gimbal.html opowiada jedynie o pixhawku, a z kolei ten poradnik http://www.olliw.eu/storm32bgc-wiki/Using_STorM32_with_ArduPilot mówi wyraźnie : idąc dalej w poradniku mówi on o i dla PWM niestety on nie działa Jednak mimo wszystko jestem dalej laikiem i nie bardzo rozumiem o co chodzi z portami UART czy CAN bus w APM, a niestety nie znalazłem żadnego poradnika mówiącego o poprawnym połączeniu APMa do Storma32 (BGC!), aby dawał wszystkie funkcje. Tak więc czy ktoś może mi podać czynności, które należy wykonać/sprawdzić aby gimbal realizował ROI? No i druga sprawa. Kiedyś przy tworzeniu samodzielnych misji przez apkę Tower na androida, gdy stworzyłem ROI, dron automatycznie kierował swój przód na ten punkt, a teraz tego nie robi (?). Jako że miałem gimbala dwuosiowego to było mi to na rękę, ale teraz gdy się nie obraca to gimbal robi to za niego i przez to patrzy na podwozie... W ustawieniach w MP jest opcja Yaw behaviour... jednak mówi ona tylko o tym czy ma dziób kierować w stronę kolejnego waypointa, a nie mówi nic o kierowaniu go na ROI. Gdzieś zmieniłem przez przypadek tą opcję czy to wina przeinstalowania Towera na starszą wersję beta? Zastanawiam się czy aby na pewno Tower to najlepsza w takim wypadku aplikacja do sterowania przez telefon, czy jednak mimo wszystko warto mieć przy sobie MP i laptopa...

-
[Gimbal] Pożenienie silników tarota z innym kontrolerem gimbala?
VVigor opublikował(a) temat w Od czego zacząć??
Cześć. Od jakiegoś czasu się niemiłosiernie zmagam z gimbalem tarot t-2d. Generalnie nie chcę już się pocić nad pisaniem elaboratu na temat tego ile poświęciłem czasu i pieniędzy na ciągłe kupowanie nowych płytek zyx-22, bo każda co chwilę padała, każda na inną przypadłość... W każdym razie, mam ramę i mam silniki tarota, ale nie chcę używać już płytki zyx-22 tylko jakąś inną. I pytanie, czy da radę te silniki pożenić (np. wymienić tylko wtyczki) z jakimś innym, prostym, dwuosiowym kontrolerem do gimbala? Co jest dla mnie ważne to możliwość obsługi kąta z aparatury, czyli musi być wyjście do FC od drona. Miałem kiedyś chińskiego gimbala tego typu: https://pl.aliexpress.com/item/RTF-FPV-Drone-Gopro3-Lightweight-2-AXIS-Brushless-Gimbal-Board-with-Sensor-Free-Debug/32843220742.html?spm=a2g17.search0104.3.17.126468c17sFPI0&ws_ab_test=searchweb0_0,searchweb201602_5_5011115_10152_10151_10065_10344_10068_10342_10343_10340_10341_312_10696_10084_10083_10618_10304_10307_10820_10301_10821_5011215_10843_10059_100031_10103_10624_10623_10622_10621_10620_528,searchweb201603_56,ppcSwitch_3&algo_expid=e4bc885d-d4e5-405c-98d9-097ab7bd9d5b-2&algo_pvid=e4bc885d-d4e5-405c-98d9-097ab7bd9d5b&priceBeautifyAB=0 Ale ustawienie tam kamerki to była istna mordęga, bo każdy milimetr się liczył... Z czego większość czasu traciłem na ustawianie kamery niż na latanie. W tarocie było to o tyle dobre, że wciskałem kamerkę i podłączałem zasilanie, a całość trwała kilka sekund. Mówię o tym, bo tam jest kontroler BGC 3.1 i nie chciałbym znowu tych męczarni powtarzać. Myślałem nad Storm32, ale kompletnie nie mam pojęcia czy te silniki od tarota się z tym kontrolerem zrozumieją i jak bardzo skomplikowaną czynnością będzie setup całości do mojej kamery. Proszę więc o jakieś porady, czy warto próbować robić takie cuda, czy jest sens, czy może lepiej stworzyć własnego gimbala? -
Dron wariuje/oscyluje po zmianie lipo z 3s na 4s
VVigor odpowiedział(a) na VVigor temat w Multikoptery
Dobra - chyba wiem w czym dokładnie jest problem i nie jest to kwestia baterii. Dron wariuje gdy jest podłączony gimbal.... ale tylko i wyłącznie jeśli jest on wpięty do prądu i działa. Gdy jest odpięty i gimbal lata luźno to wibracje nie występują poniżej filmik https://www.youtube.com/watch?v=jkACa1YnDf4 -
Dron wariuje/oscyluje po zmianie lipo z 3s na 4s
VVigor odpowiedział(a) na VVigor temat w Multikoptery
Tylko ze ja nie zmieniałem pidów przy zmianie baterii, a mimo wszystko nie lata jak powinien. Jutro spróbuję polatać na poważnie po zmianie p gain i dam znać co i jak. -
Dron wariuje/oscyluje po zmianie lipo z 3s na 4s
VVigor odpowiedział(a) na VVigor temat w Multikoptery
Jeszcze nie - na razie tylko manualnie zmieniałem P gain w osi pitch i roll za pomocą potencjometru na 6 kanale. Jako domyślne P było ustawione na 4,5. Dałem zakres potencjometru na 3-6 i przy ~3 było już lepiej, ale dalej problem występuje. Lepiej zrobić autotune czy próbować ręcznie zmieniać pidy? -
Cześć. Dzisiaj w celu zwiększenia możliwości wyniesieniowych koptera, postanowiłem zmienić baterię z 3s na 4s dokładnie tej samej firmy o tych samych parametrach. Kopter się uzbraja, z tym nie ma problemu, ale jak tylko wzniosę się do góry, zaczyna on oscylować, wariować jakby jakaś część była luźna np. Wpada w wibracje do takiego stopnia, że ramiona uginają się góra- dół w bardzo szybkim tempie. Czy to problem PIDów i trzeba po zmianie baterii odpalić autotune'a, czy może ja o czymś zapomniałem? Silniki to multistary 2216, które w założeniu działają na 2-3s, ale z tego co widze na internecie to ludzie latają na nich z baterią 4cellową i nie ma problemu. Skład: Rama tbs discovery 4xMultistar 2216 800kv 4x Afro esc 20A 2-4s APM 2.8 Bateria Multistar 5200mah 4s, 10c śmigła : 10x45 - nie zmieniam ich ze względu na to, że przy 3s jeden silnik na tych śmigłach ma ciąg 680g max, a przy 4s - 980g max.
-
Wsteczny padł z przeciążeń czy tak po prostu, sam z siebie? Te dwa pozostałe prądowo wystarczą do lipo 3s i tego silnika klasy 600?
-
Tak, ale te regulatory są na baterie lipo do 2s, a jak są na 3s to do silników klasy 380 max, więc chyba w tej cenie nic nie znajdę Jest jeszcze coś takiego: https://pl.aliexpress.com/item/Freeshipping-HobbyWing-QuicRun-1-10-Brushed-60A-Electronic-Speed-Controller-ESC-1060-RC-Car/32635820681.html?spm=a2g17.search0104.3.1.47c15065Cc9Dky&ws_ab_test=searchweb0_0,searchweb201602_5_10152_5722917_10709_10151_10065_10344_10068_10342_10343_5722817_10340_10341_5722617_10696_10084_10083_10618_10304_10710_10307_10301_5722717_5711215_10059_308_100031_10103_5722517_10624_10623_10622_5711315_10621_10620,searchweb201603_6,ppcSwitch_3&algo_expid=bce375ac-d2f1-4691-bbef-d6edc4b3fee8-0&algo_pvid=bce375ac-d2f1-4691-bbef-d6edc4b3fee8&priceBeautifyAB=0 https://pl.aliexpress.com/item/ZMR-Brushless-CCW-Motor-1804-2400KV-Micro-Size-Integration-Outrunner-Brushless-Motor-For-240-250/32278956709.html?spm=a2g17.search0104.3.10.47c15065Cc9Dky&ws_ab_test=searchweb0_0,searchweb201602_5_10152_5722917_10709_10151_10065_10344_10068_10342_10343_5722817_10340_10341_5722617_10696_10084_10083_10618_10304_10710_10307_10301_5722717_5711215_10059_308_100031_10103_5722517_10624_10623_10622_5711315_10621_10620,searchweb201603_6,ppcSwitch_3&algo_expid=bce375ac-d2f1-4691-bbef-d6edc4b3fee8-1&algo_pvid=bce375ac-d2f1-4691-bbef-d6edc4b3fee8&priceBeautifyAB=0 https://pl.aliexpress.com/item/OCDAY-1Pc-7-2V-16V-320A-High-Voltage-ESC-Brushed-Speed-Controller-RC-Car-Truck-Buggy/32801028616.html?spm=a2g17.search0104.3.25.47c15065Cc9Dky&ws_ab_test=searchweb0_0,searchweb201602_5_10152_5722917_10709_10151_10065_10344_10068_10342_10343_5722817_10340_10341_5722617_10696_10084_10083_10618_10304_10710_10307_10301_5722717_5711215_10059_308_100031_10103_5722517_10624_10623_10622_5711315_10621_10620,searchweb201603_6,ppcSwitch_3&algo_expid=bce375ac-d2f1-4691-bbef-d6edc4b3fee8-3&algo_pvid=bce375ac-d2f1-4691-bbef-d6edc4b3fee8&priceBeautifyAB=0 Jednak w tych dwóch ostatnich nie jest napisany stały prąd podawania, jedynie szczytowy. Btw, skąd wiedziałeś, że ten pierwszy esc z poprzedniego posta ma poniżej 20A stałego prądu?
-
No i właśnie tak zrobię. Dzisiaj przypomniało mi się, że w odmętach piwnicy posiadam starą wkrętarkę z Toya z dokładnie takim silnikiem: https://imged.pl/silnik-wkretarka-12-v-einhell-ferm-eurotec-toya-2892932.html Wszystko działa elegancko i powiem szczerze, że po podłączeniu lipo 11,1v, na najniższych obrotach, wydają się one na tyle małe, że być może nie będzie trzeba stosować przełożenia, albo przełożenie niewielkie, w granicach 1:3, 1:4. Jako że nie potrzebuję cudownego esc to myślę, że kupię takiego chińczyka: https://pl.aliexpress.com/item/320A-6-12V-Brushed-ESC-Speed-Controller-W-2A-BEC-for-RC-Boat-U6L5/32820246554.html?spm=a2g17.search0104.3.52.7b445065mNi5l8&ws_ab_test=searchweb0_0,searchweb201602_5_10152_10709_10151_10065_10344_10068_5722815_10342_10343_10340_5722915_10341_5722615_10696_10084_10083_10618_10304_10710_10307_10301_5722715_5711215_10059_308_100031_10103_10624_10623_10622_5711315_5722515_10621_10620-10620normal#cfs,searchweb201603_6,ppcSwitch_3&algo_expid=8a6fda1d-5c08-48e2-a64e-56a529b0e7d2-7&algo_pvid=8a6fda1d-5c08-48e2-a64e-56a529b0e7d2&priceBeautifyAB=0
-
Chwila, przecież zwiększenie obwodu rolki spowoduje, że każdy jeden obrót silnika przesunie mi całego cable cama o 12cm, a nie o 4cm, a przecież zależy nam na zmniejszeniu prędkości, bo nasze obroty są za duże, a nie na jej zwiększeniu, dobrze myślę? Hmm, to, że z sensoredem się nie zmieszczę to już wiem, tam kwoty znacznie przewyższają mój budżet, z którym i tak już poleciałem. Powiedzmy więc, że zwiększymy ten budżet do 200 zł na silnik i regulator. No właśnie nie do końca i zauważyłem to na podstawie swojego prototypu. Mówię teraz o rolce napędzającej, pozostałe dwie są na łożyskach, tak jak mówisz. Linkę miałem zawieszoną na długości raptem 7 metrów, nie była szczególnie naciągnięta. Ale może gwoli wyjaśnienia: Linka w cable camie nie idzie cały czas prosto, ma pewne przekoszenia pomiędzy rolkami na łożyskach a rolką napędzającą. Teraz wyobraź sobie linę długości 50 metrów, która jest napięta bardzo mocno, wtedy nacisk na oś rolki napędzającej jest naprawdę bardzo duży. Ja zauważyłem to w silniku do drona przy lince 7metrowej, a gdzie 50 metrów i to cholernie napięte? Dlatego pytam czy krokowiec się nie zdusi, w sumie to samo z silnikiem modelarskim, chociaż do samochodowych chyba nie będzie problemu, podejrzewam, że ruszają pod obciążeniem. Okej, a możesz mi pojaśnić jak mógłbym użyć reversu na aparaturze lotniczej? Zmiana kierunku podpięta pod kanał z jakiegoś przełącznika? Czyli realnie na jaką sprawność mogę liczyć przy obciążeniu o jakim mówimy, 70%? Na chwilę obecną widzę to tak: Silnik modelarski 2000kv z chińskim reglem wyposażony w przekładnię, którą prawdopodobnie sam wydrukuję, o jakim przełożeniu to trzeba do tego jeszcze dojść. Masz jakiś typ co do silnika i regla, który można wykorzystać?
-
Tego właśnie nie wziąłem pod uwagę, że silniki modelarskie do samochodów mają z reguły o wiele większe kV niż takie do dronów. W moim małym silniku mam 920kv z baterią 11,1v jestem w stanie względnie osiągnąć tego typu obroty. Jednak w samochodach gdy kv osiągają 4500 to ten wynik nie jest możliwy bez przełożenia. Powiem szczerze, że najwygodniej byłoby mi to zrobić bez przełożenia, mniejsza awaryjność i mniejsza komplikacja . Nie wiem co masz na myśli przez liczenie, generalnie wiem jedno- przy założeniu, że moja rolka napędowa ma obwód ok. 4cm, a chcę osiągnąć zakres prędkości w granicach 30cm/s - 300cm/s to potrzebuję zakres obrotów rzędu 450-4500. Czytałem trochę w tym temacie: http://pfmrc.eu/index.php/topic/58321-potrzebna-pomoc-przy-doborze-silnika-do-cabel-line-cam/ Co do silnika krokowego- tam na pewno osiagnę takie obroty jakie bym chciał bez zastosowania przełożeń, ale czy krokowiec nie zadusi się przy sile jaką musi przełożyć na naprawdę mocno napiętą linę? Ale okej, niech będzie, że zastosowałbym przełożenie, więc licząc: Zakładam, że silnik samochodowy będzie mieć 4000kv, więc dla mojego lipo 11,1 jego maksymalne obroty będą wynosić ok 44000 na minutę, więc ok. 740/sekundę Przy mojej rolce i maksymalnej prędkości, którą chcę osiągnąć: czyli 300cm/s / 4cm = 75obr/s , a więc obroty maksymalne wynoszą prawie 10 razy więcej niż zakładane. Czy znajdę w ogóle przekładnię 1:10? Czy może lepiej zastosować klasycznie dwa koła zębate, a może jeszcze lepiej pasek? Podejrzewam, że minimalne obroty z tym przełożenie również osiągnę, bo potrzebuję 7,5 obrotu/s na rolce, czyli z przełożeniem 1:10 wychodzi 75obr/s na silniku (4500obr/min), czy takie obroty są możliwe do osiągnięcia przy minimalnej ilości gazu? https://pl.aliexpress.com/item/NOWA-Aktualizacja-Wodoodporna-3650-3900KV-RC-Silnik-Bezszczotkowy-60A-ESC-programator-zestaw-Combo-Zestaw-do-1/32850306135.html?spm=a2g0s.8937460.0.0.2a8RHA znalazłem taki zestawik, względnie mieści się w cenie, jednak nie wiem czy posiada on reverse (powiem szczerze nawet nie wiem czym przejawia się możliwość rewersu w esc, jakimś dodatkowym kablem sygnałowym czy jak?) Dalej potrzebuję dwie zębatki, które będę mógł tutaj zastosować. Czy jesteś w stanie powiedzieć mi czym muszę się kierować przy wyborze zębatki atakującej i odbierającej? W atakującej podejrzewam, że na pewno średnicą wału silnika, która w powyższym linku wynosi ok. 3,175mm, ale jak określić przełożenie, na podstawie ilości zębów czy jakichś innych wymiarów?
-
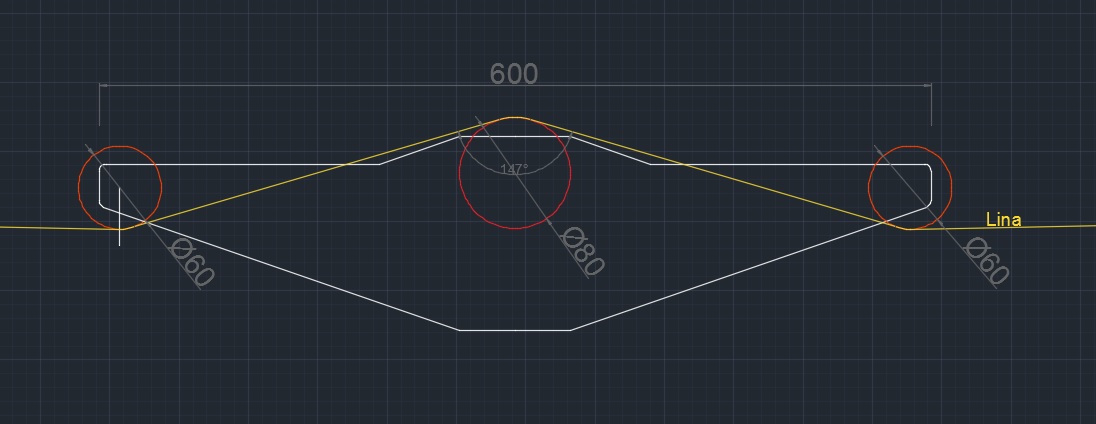
Cześć. Powoli przymierzam się do zbudowania swojego poważnego projektu cable cama. Prototyp już powstał, jednak jak to prototyp, nie był idealny, a przy jego budowie powstały pewne komplikacje. Całość początkowo oparłem na zwykłym silniku 2212 z drona, wraz ze zwykłym regulatorem również do drona, jednak przez całkowitą masę cable cama, która wynosiła ok. 1,5kg, to taki mały silniczek nie dał rady tego udźwignąć i zwyczajnie ruszyć. Abstrahując już od tego, że nie miał biegu wstecznego i za każdym razem musiałem biegać i ustawiać cable cama na początku trasy. Postanowiłem więc silnik wraz z regulatorem zmienić, ale jako że jestem tylko droniarzem, a o silnikach innego typu niewiele wiem to piszę tutaj. Generalnie szukam silnika i regulatora do niego, który pozwoli mi wykręcić zakres obrotów w granicach 400-4500 (ze względu na to, że moja rolka prowadząca ma obwód ok. 4,2cm, a chcę osiągnąć prędkości 30cm/s-300cm/s) Ważne, żeby silnik miał na tyle dużo mocy, aby nie było dla niego problemem uciągnięcie tych 2kg, a dodatkowo- aby przy ruszaniu potrafił... ruszyć. Z tego co poczytałem to problemu z ruszeniem z obciążeniem nie mają silniki z czujnikiem położenia "wału", ale nie wiem czy jest to konieczne, a czy może wystarczy po prostu większa moc silnika. Dodatkowo oczywiście szukam do tego regulatora, który będzie posiadał również reverse. (Jak się domyślam, raczej nie będzie problemu z ustawieniem reversu w aparaturze do drona typu turnigy9x?) Całość będzie zasilana z lipo 3s. Budżet jaki mogę przeznaczyć na taki silnik z reglem to ok. 100 zł, mogą być używki. Czytałem też coś o silnikach do wkrętarek, ponieważ nie mają kłopotu przy pracy pod obciążeniem, być może ktoś ma jakieś doświadczenia w tym temacie.
-
... Napisałem w pierwszym poście, że odbiornik jest elegancko sparowany z aparaturą.
-
Wybacz, że dopiero teraz odpisuję, ale byłem tydzień poza domem. Moje limity wyglądają następująco: dla CH3 : -4.0 / -78/+78. Przechodzi to na 1100 na dole i 1900 na górze. Rozszerzałem limity tak, że doszło na dole nawet do 900, a na górze do 2000, ale esc dalej nie łapie. Czy powinien załapać automatycznie po zmianie ustawień w aparaturze czy powinienem go jeszcze raz zbindować? Próbowałem kalibrować jak zawsze, bez skutku. Trymery obok drążków również nic nie dają. Poszperałem dodatkowo- Podłączyłem APMa w sposób następujący: Tylko jedno esc na wyjściu z silnikiem, na wejściu oczywiście odbiornik z kablami wpiętymi w ch3. Odbiornik stary (działający): Wchodzę w mission plannera, otwieram zakładkę radio calibration i gaz działa rewelacyjnie- reaguje na wychylenie drążka Odbiornik nowy Robię dokładnie to samo, gaz stoi nieruchomo, widać, że nie dostaje kompletnie sygnału gazu od aparatury (?).