LordKris
-
Postów
55 -
Rejestracja
-
Ostatnia wizyta
-
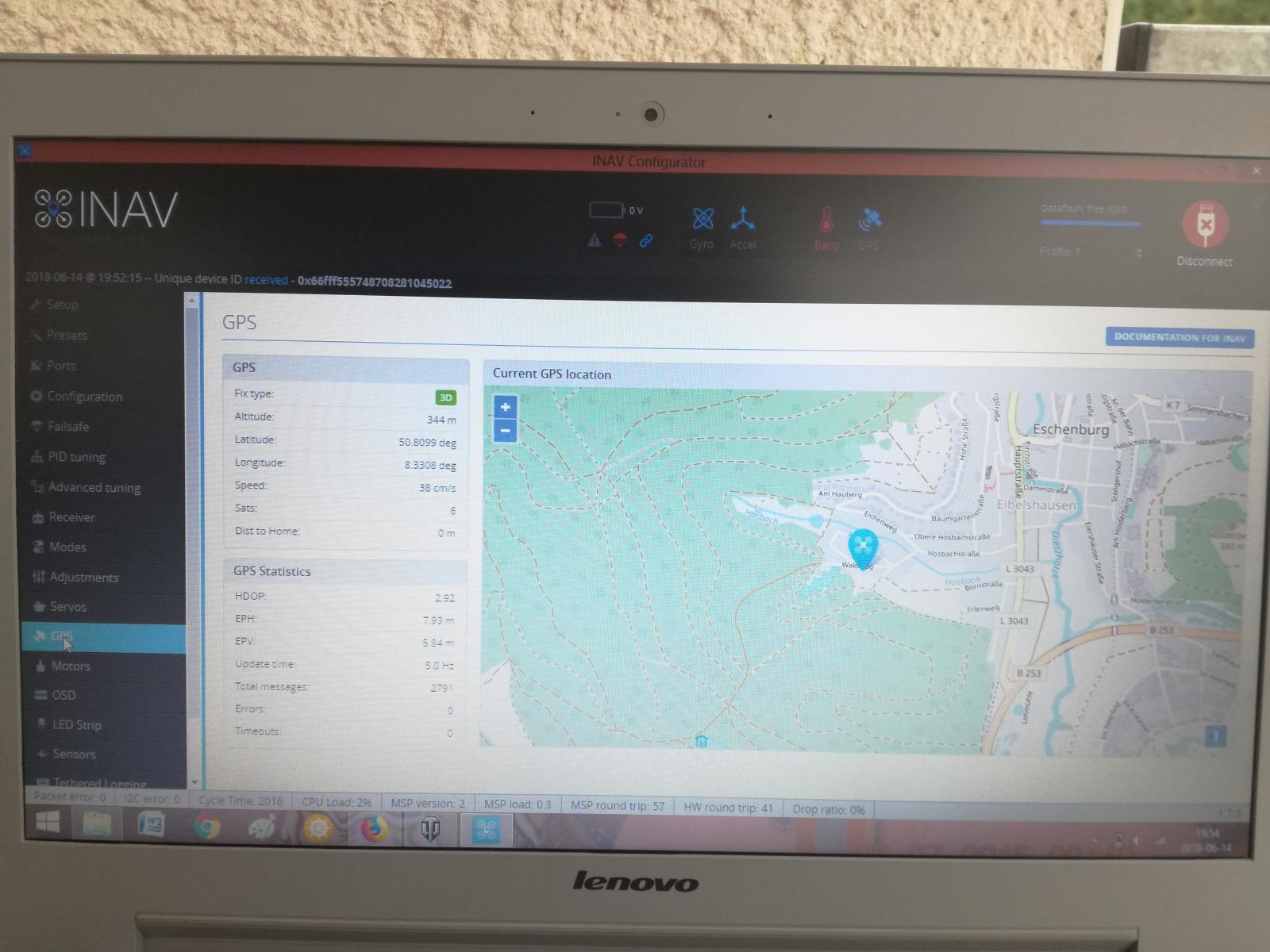
Witam ponownie Dotarło do mnie ostatnio trochę części: - baro BMP280 - GPS U-Blox Neo-7M z dużą anteną - GPS do mini APM (Mini APM FC też zamówiony - Maxiiii mnie namówił ) A teraz do sedna. Wgrałem na jedną płytkę CC3D Inav 1.7.3. i nie bardzo wiem jak to wszystko skonfigurować. Barometr dotarł jako pierwszy więc podłączyłem go do FC przez Flexi (używając napięcia 3,3V) i działa. Następnie dotarł GPS. Po Setupie w U-Center GPS działa po porcie Flexi - nie działa w porcie Main. Może coś mam źle ustawione że to co jest podłączone pod port Main nie działa Na zdjęciu widać ze barometr jest na czerwono - jest podpięty pod Main Port a GPS pod Flexi. GPS działa a baro nie

-
Świetny temat. Ja też lubie dłubać i na pewno będę temat obserwował. Pozamawiałem ostatnio trochę gratów i też chcę sobie zrobić coś innego jak X czy H. Bardzo chodzi mi po głowie V-Tail ale nie taki odkryty jak Hunter tylko bardziej zabudowany. Ja projektuje w Inventorze a jako materiał posłuży aluminium. Jako inspiracja posłużyła Medusa https://www.robotshop.com/blog/en/medusa-project-showcase-12997 Mojego V-Tail chcę zrobić w rozmiarze Huntera 500. Może coś opracujemy razem ??? Ja wykonam ramę z aluminium a ty osłony na 3D. Pracuje w firmie w której mogę sobie wyciąć elementy na laserze i wygiąć w razie potrzeby na maszynie TruBend5170 Na Inventorze dopiero się uczę ale udało mi się narysować górną i dolną część jednego z przednich ramion.
-
o takie 20 A https://www.ebay.de/itm/Emax-simon-series-ESC-Speed-Controller-Regler-6A-12A-20A-25A-30A-40A-BEC-/232196500670?var=&clk_rvr_id=1538489450616&utm_medium=cpc&utm_source=twenga&utm_campaign=twenga&utm_param=eyJlcyI6MCwicyI6NTMzODY0NywiY2kiOiIwNDMwYzI4NWQ0YmYzNTdiNzAzYTA1OTAwMjFlYzY0OSIsImkiOiIyMzIxOTY1MDA2NzAiLCJ0cyI6MTUyNjkzMDMzMCwidiI6Mywic28iOjE1MDAsImMiOjc0MzEyfQ%3D%3D&rmvSB=true
-
czyli takie cuś ??? https://www.ebay.com/itm/Mini-APM-V3-1-Flight-Controller-Board-Upgraded-APM-2-6-2-8-for-DIY-RC-Drone-250/352240973129?hash=item520332b549:g:KHAAAOSwEOpaQxGd i też potem Inav wgrać trzeba ? Odbiornik PWM może zostać ?
-
Nie mam za bardzo ochoty wydawać 60 euro na FC. Ten kosztuje 20 euro z wysyłką - Pytanie czy to co ma jest dobre i warte swojej ceny ?
-
ok. dzięki A co możecie powiedzieć na temat tego FC??? http://shop.seriouslypro.com/sp-racing-f4-neo tylko ten FC obsługuje PPM lub S Bus ? Czy PWM też ? - bo zielony jestem
-
Z tego co Maxiiii napisał kompas jest w GPS który zamówiłem Poczekam na ten GPS i spróbuje to jakoś podłączyć. Najbardziej mi zależy żebym mógł ustawić że dron nie odleci np dalej niż na 200 m i ewentualnie jak coś to po uruchomieniu jakiegoś przycisku/switcha dron wykona funkcje RTH Pytanie - Czy mogę zostać na zwykłym odbiorniku PWM czy lepiej jest przejść na PPM ???
-
Czy taki kontroler ogarnie już bez problemu GPS, RTH, Latanie po punktach itd ??? https://www.ebay.com/itm/OMNIBUS-F4-Pro-V2-Flight-Controller-with-Integrated-OSD-5V-3A-BEC-Current-Sensor/202208397658?epid=13013966589&hash=item2f148f495a:g:04IAAOSw9oNabvMK i czy mogę zostawić odbiornik na PWM czy jakiś PPM mam kupić do tego FC ?
-
Pytanie z innej beczki trochę. Ustawiłem radio na kanale 5 jako GEAR. Jak zrobić że po przełączeniu dźwigni np zapaliły się diody lub Buzzer zaczął brzęczeć ? A najlepiej jakby dało się podłączyć np ProMini.
-
Zainstalowałem sterownik do STM32 i teraz po podłączeniu bezpośrednio pod USB komp widzi płytke na COM7 i Inav już też łączy się bez Arduino, ale w dalszym ciągu nie mogę skalibrować akcelerometru
-
Jak uruchomię program to widzę tylko COM1. Po podłączeniu FC nie ma żadnej reakcji. Działa tylko przez Arduino. Próbowałem też wgrać tą samą techniką co Inav BetaFlight i CleanFlight ale bezskutecznie Warto to zamówić https://hobbyking.com/en_us/illuminati-32-flight-controller-with-osd-cleanflight-supported.html lub https://hobbyking.com/en_us/flip32-naze32-all-in-one-pro.html
-
OK. Wgrałem Inav 1.7.3 używając Arduino Uno i gniazda Main Port na płytce CC3D. Po podłączeniu bezpośrednio przez kabel USB/MicroUSB Inav nie chce się połączyć (nie widzi portu COM). Jak podłącze przez Arduino to płytka łączy się z programem Inav ale i tak nie mogę w tym Inav nic zrobić poza symulacją jak obrazek drona porusza się wraz z ruchem płytki. Nie mogę zrobić kalibracji akcelerometra (6 kroków). Po wciśnięciu kalibracji po chwili w logu wyskakuje komunikat że zakończono sukcesem. Podłączyłem odbiornik do płytki i jakiekolwiek wychylenie drążków nie powoduje żadnej reakcji na ekranie. Może coś zrobiłem nie tak albo w ogóle nie zrobiłem. Nie wiem co dalej
-
A tak jak teraz czekam na ten GPS to napiszcie mi proszę w co jeszcze mogę doposażyć CC3D z Inav 1.7.3. aby poprawić komfort itd
-
ok dzięki. Jutro wgram ten ostatni plik który był wspierany czyli 1.7.3. i pozostało czekać na moduł GPS a którą wersję wybrać PWM czy PPM ??? bo nie bardzo wiem
-
Już chyba wiem jak wgrać Inav na płytkę CC3D ale znalazłem tylko plik 1.7.3. ze strony https://github.com/iNavFlight/inav/releases gdzie najnowszy to jest 1.9.1 ale nie znalazłem 1.9.1. CC3D. Czy 1.7.3.CC3D.hex będzie ok ?