Artem85
-
Postów
51 -
Rejestracja
-
Ostatnia wizyta
-
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
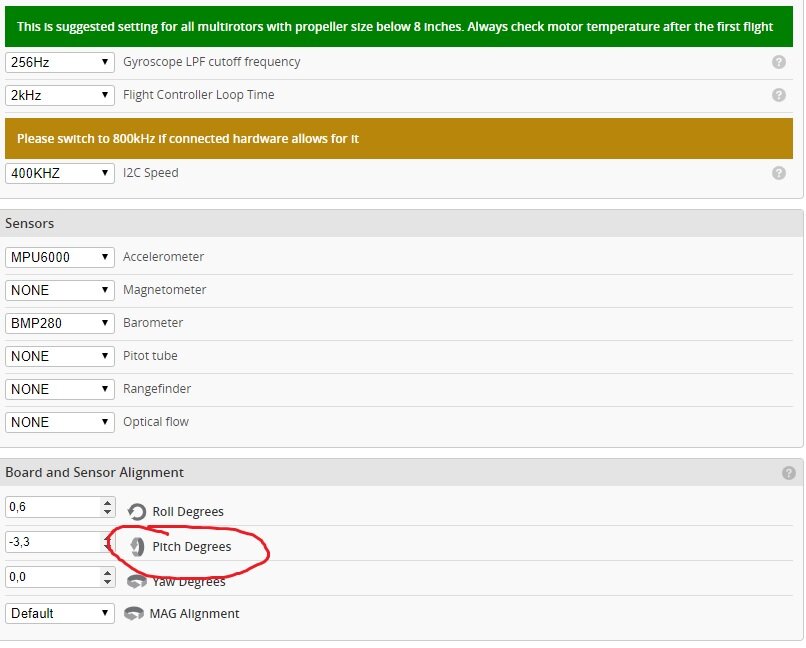
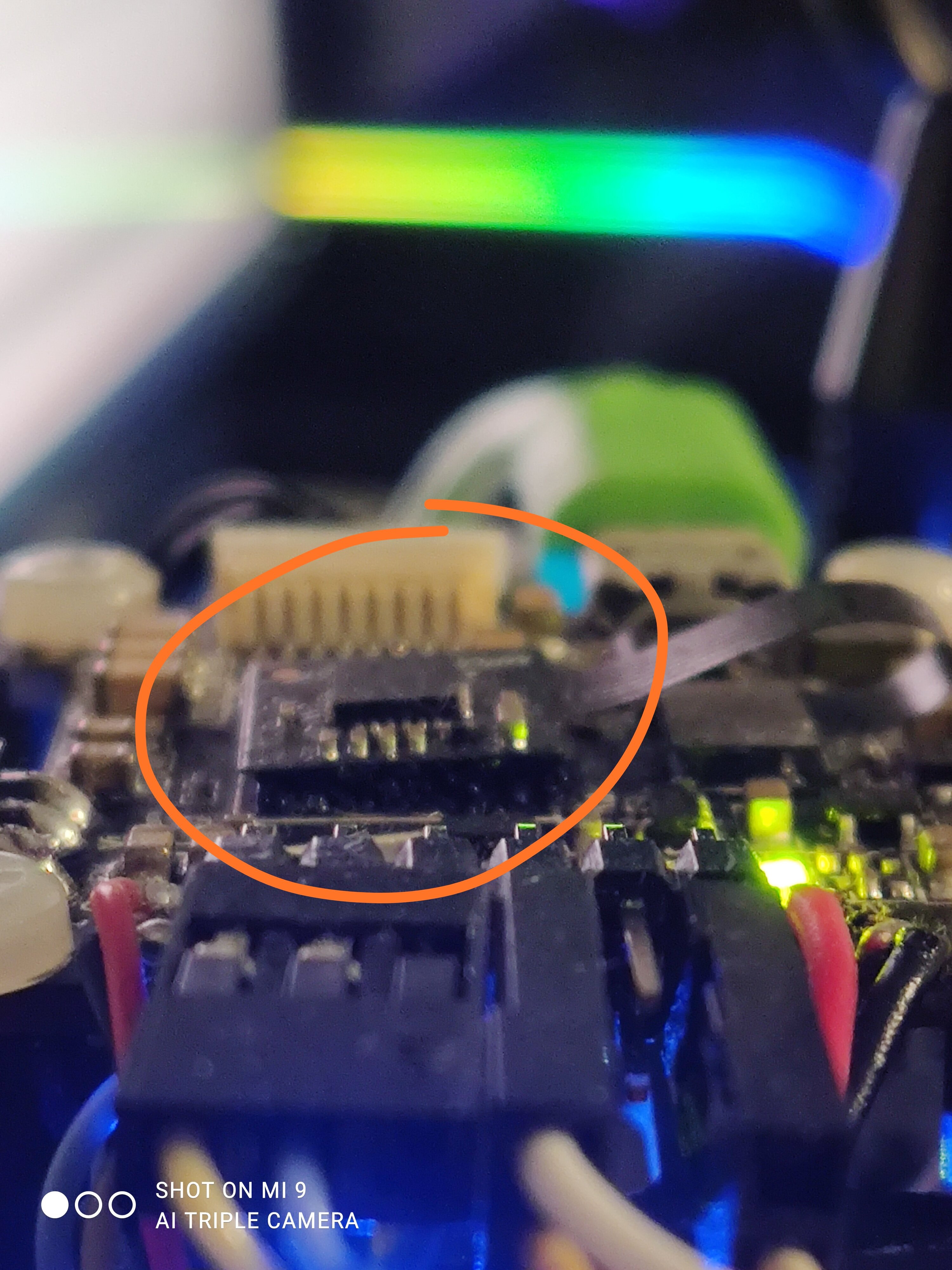
Trafiłeś w dychę miałem różnicę 3,3 stopnia. Mało tego, dzięki temu mamy już jasność skąd to rzekome, samoistne zwiększanie obrotów. Z samego dźwięku wydaje się faktycznie jak by zwiększały się obroty a faktycznie jednak to jest właśnie to zjawisko, o którym wspominałem - on zwyczajnie zwiększa obroty ale tylko na dwóch silnikach a spowodowane jest to właśnie tym, że wartość pitch nie jest równa 0. Teraz pytanie co zrobić w tej sytuacji ? Nie sądzę aby była to kwestia kalibracji bo zarówno w betaflight jak i w inavie występuje to zjawisko a za każdym razem po wgraniu oprogramowanie kalibrowałem żyroskop. Testowo dokonałem poprawek w samym oprogramowaniu w tym miejscu: I problem wydaje się być rozwiązany, ale czy faktycznie to jest jedyne rozwiązanie czy masz jakiś inny pomysł ? Dodam jeszcze, że zwróciłem uwagę na montaż samego MPU w kontrolerze kakute F7. Jest on zamocowany na piance i podłączony tasiemką - on zwyczajnie napiera na MPU i to jest właśnie odchylone. Kierunek odchylenia MPU wydaje się pokrywać właśnie z moim problemem - jest pochylony do przodu i dlatego kontroler od razu zwiększa obroty na przednich śmigłach aby to wyrównać. Dziwi mnie tylko, że kalibracja nie uwzględnia tego położenia. Czy sama kalibracja nie powinna właśnie działać w taki sposób aby uwzględnić położenie IMU i wyzerować wszystko w takim położeniu w jakim się znajduje ?
-
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
Jest w poziomie, animacja w iNavie wyświetla się poprawnie względem faktycznego położenia, kalibracja oczywiście zrobiona. Niestety bez zmian. -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
Skonfigurowałem wstępnie iNava, jednak nadal mi spokoju nie dają te obroty. Tak jak wcześniej wspominałem, w Inavie nie ma tego samoistnego zwiększania obrotów jednak tylko w przypadku braku jakichkolwiek trybów. Podczas gdy włącze tryb Angle (który jest chyba wskazany w moim przypadku) to dzieje się tak samo - obroty same rosną. I nie było by w tym nic dziwnego bo już wytłumaczyłeś mi dlaczego tak się dzieje "na stole", tylko teraz sprawdziłem w jaki sposób one rosną - i nie jest to zwiększanie obrotów proporcjonalnie na wszystkich silnikach a tylko na dwóch przednich - moim zdaniem pierwsze co zrobi dron to przechyli się od razu do tyłu zamiast wystartować. (chyba, że w przypadku gdy zacznie się delikatnie unosić przód drona to żyroskop to wykryje i odrazu doda obroty na tył, ale chyba tak nie będzie - to musiałaby być reakcja milisekundach) Na filmie wrzucam zachowanie drona i już wyjaśniam o co tam chodzi: 1. Na początku jest uzbrojenie drona i silniki wchodzą w tryb IDDLE na obroty 15%, brak jakichkolwiek trybów. Ruch drążkiem przepustnicy jak widać skutkuje zwiększeniem obrotów wszystkich czterech silników równomiernie w zależności od wychylenia drążka. 2. Następnie przełączam w tryb ANGLE i po wychyleniu drążka przepustnicy obroty rosną nieproporcjonalnie - tylko na dwóch przednich silnikach. Mało tego - jak zapewne widać na filmie po odjęciu trochę "gazu" drążkiem silniki od razu się "wyłączają" - w sensie, że przechodzą w tryb IDDLE, co też mnie bardzo niepokoi https://drive.google.com/file/d/1NxXe_vtlNHhUNCFwIPesDVHBiZmP3Q-z/view?usp=sharing -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
O kurcze, no to lipa trochę bo ten dronik z założenia miał być do foto także taki zawis i utrzymanie wysokości jest niezbędne. Mam rozumieć że raczej marne szanse są na stabilny zawis względem wysokości czy jest to do zrobienia ? Wspomniałeś również o iNavie. Z ciekawości go wgrałem, tam już mogę wybrać profil quada 10 calowego co za tym idzie są zmienione pidy. Ku mojemu zdziwieniu zachowanie na stole jest całkiem inne. Nie ma tego samoistnego zwiększania obrotów silnika, zwyczajnie mogę drążkiem je regulować. -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
Jakoś ostatnio się nie składa żeby zrobić oblot, ale niebawem postaram się zorganizować trochę czasu i poinformuję o efektach. Mam jednak jeszcze pytanie odnośnie drążka przepustnicy/wysokości w aparaturze. Otóż jak wiadomo nie posiada on sprężynki przez co się nie centruje. Jak to jest z dronem, jak to się będzie zachowywać. W aparaturach oryginalnych od do dronów drążek wysokości jest centrowany w środkowej pozycji i dopiero ruch w górę daje wznoszenie czy też start. Jak to będzie wyglądało w przypadku mojego Radiomastera TX16s ? W jakiej pozycji drążka będę mógł uzyskać zawis drona ? Kolejne pytanie - czy samą aparaturę należy w jakiś sposób skonfigurować pod drona ? widzę, że profil mogę wybrać tylko pod samolot z silnikami lub szybowiec. Osobiście wydaje mi się, że nie powinno to mieć znaczenia bo to kontroler w dronie za wszystko odpowiada, chyba że właśnie tutaj chodzi o charakterystykę drążka przepustnicy dla drona ? -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
Dzięki Patryk za zainteresowanie. Pozmieniałem parametry zgodnie z Twoimi wskazówkami jednak nadal jest ten efekt zwiększania obrotów silnika - nawet bardziej odczuwalny (oczywiście mówimy o dronie na stole), wystarczy zwiększyć powiedzmy o 5 % obroty a te samoistnie rosną znacznie szybciej - w jakieś 5 sekund do maksymalnych. Powiedz mi - ja generalnie muszę się pozbyć tego efektu "na stole" ? czy w powietrzu nie będzie występować takie zjawisko i będę miał kontrolę nad obrotami ? -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
Aaaa no właśnie teraz już rozumiesz czego się obawiam z bateria, bez gimbala to lekko ponad 1 kg wagi smigla to 10" -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
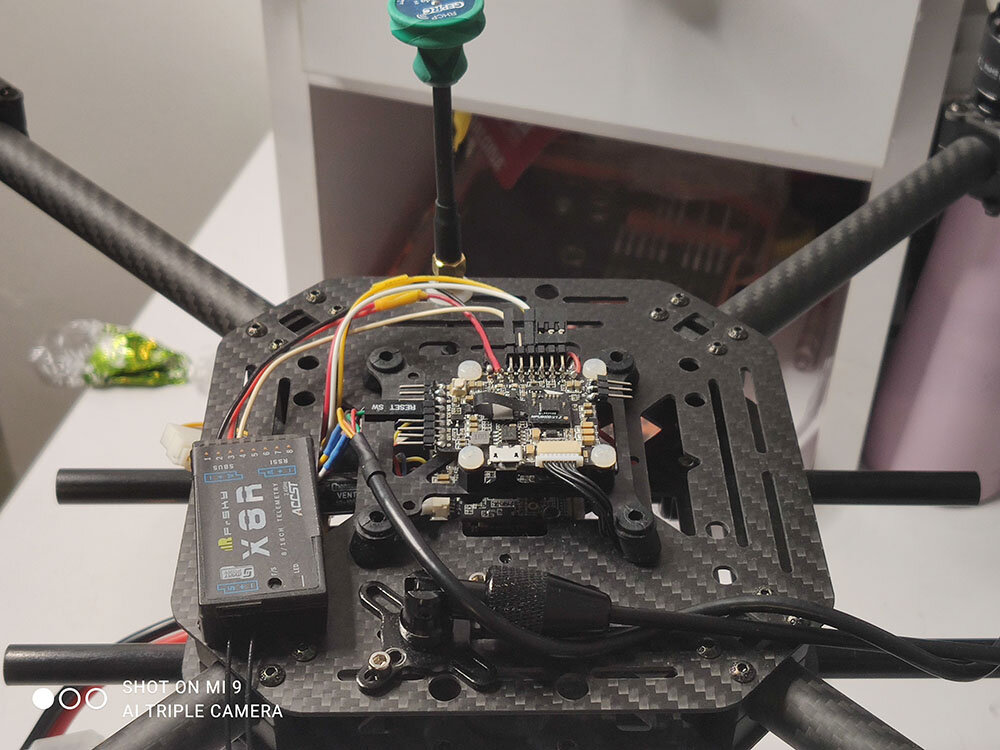
Oczywiście, kilka fotek zrobione na szybko - oczywiście jeszcze jest tu trochę do zrobienia i to co widać to jeszcze nie finalny efekt. Dzięki, poczytam w wolnej chwili # # diff # version # Betaflight / STM32F745 (S745) 4.2.3 Sep 20 2020 / 20:43:50 (2696b7c88) MSP API: 1.43 # config: manufacturer_id: HBRO, board_name: KAKUTEF7, version: cc8e118f, date: 2020-03-04T02:37:20Z # start the command batch batch start board_name KAKUTEF7 manufacturer_id HBRO # feature feature -RX_PARALLEL_PWM feature RX_SERIAL feature MOTOR_STOP feature GPS # serial serial 0 2048 115200 57600 0 115200 serial 2 2 115200 57600 0 115200 serial 3 32 115200 57600 0 115200 serial 5 64 115200 57600 0 115200 # aux aux 0 0 0 1600 2100 0 0 aux 1 1 1 1900 2100 0 0 # master set acc_calibration = -121,-11,-156,1 set mag_hardware = AUTO set mag_calibration = 53,-1575,-554 set baro_hardware = AUTO set rssi_channel = 8 set serialrx_provider = SBUS set motor_pwm_protocol = DSHOT600 set gps_provider = UBLOX set gps_ublox_use_galileo = ON set osd_vbat_pos = 2099 set osd_rssi_pos = 2106 set osd_crosshairs_pos = 2285 set osd_ah_sbar_pos = 2286 set osd_ah_pos = 2158 set osd_current_pos = 2466 set osd_gps_lon_pos = 463 set osd_gps_sats_pos = 14411 set osd_altitude_pos = 2090 set osd_warnings_pos = 2446 set osd_esc_rpm_pos = 2390 set gyro_1_align_yaw = 2700 profile 0 rateprofile 0 # end the command batch batch end # Właśnie to sprawdziłem i faktycznie po zasymulowaniu fikołka automatycznie się rozbraja. Jednak działa tak tylko w trybie ANGLE
-
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
ESC to tekko32 4in1 od holybro. A o co chodzi z tym softem do ESC ? Do niego też się wgrywa coś ? -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 odpowiedział(a) na Artem85 temat w Multikoptery
Nie no jakieś nawyki mam bo latam samolotami, także aparatura w ręku jest cały czas. Jeśli chodzi o drony to latałem takimi maleństwami i generalnie podstawy sterowania dronem znam i jakieś tam odruchy. Jeśli dron będzie pracował prawidłowo to jestem prawie pewny że go opanuje. Boje się tylko o jakiś błąd czy usterkę żeby nie rozwalić sprzętu na starcie. Oczywiście zdaję sobie sprawę że disarm wyłączy silniki, co nie zmienia faktu że po dronie pewnie wiele nie zostanie nawet gdy spadnie z 5 metrów, masa robi swoje. Jeśli chodzi o reakcje na stole to szczerze mówiąc też właśnie pomyślałem o tym że może zachowuje się tak dziwnie z racji tego że ruch drążkiem nie daje żadnej akcji względem położenia i elektronika próbuje za wszelką cenę wykonać jakiś ruch czy też utrzymać drona na jakieś wysokości. -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Artem85 opublikował(a) temat w Multikoptery
Witam, jakiś czas temu postanowiłem złożyć sobie jakieś latadło typu quadcopter. Nie miałem odwagi jeszcze zrobić pierwszego startu ponieważ boję się, że pierwszy lot będzie tym ostatnim, tym bardziej że mam pewne podstawy by tak twierdzić. Dodam jeszcze, że oprogramowanie w kontrolerze to betaflight a sam kontroler to Kakute F7. Po pierwsze czy macie jakiś sprawdzony sposób na stosunkowo bezpieczne sprawdzenie lotu takiego drona ?, w sensie zamocować jakąś linkę czy listwy aby nie zrobił fikołka tudzież nie odleciał za bardzo aby sprawdzić jedynie jego podstawowe zachowania ? Po drugie - prawdopodobny problem, który zauważyłem: Otóż po uzbrojeniu drona silniki zaczynają pracować w trybie powiedzmy jałowym - na najmniejszej mocy. W tym trybie, gdy oczywiście drążek przepustnicy jest na -100% wszelkie ruchy drugim drążkiem do sterowania wydają się odzwierciedlać poprawne reakcje na silnikach - czyli drążek w lewo zmienia obroty silników w takki sposób aby dron poleciał w lewo i analogicznie w każdym innym kierunku. Problem pojawia się gdy dodam trochę "gazu" i ostawie przepustnicę powiedzmy delikatnie w górę - wtedy efekt jest taki, że obroty po zwiększeniu do pozycji zadanej po chwili zaczynają same rosnąć, w efekcie aż do maksymalnych. Dodatkowo gdy obroty nie są jeszcze jakieś duże to mogę drążkiem przepustnicy zbić je do trybu "jałowego". Jednak zauważyłem, że po przekroczeniu jakiejś wysokiej granicy drążek przepustnicy już nie reaguje. Oczywiście boję się, że dron najzwyczajniej zwiększy obroty na maksa i poleci w górę nie mając nad nim kontroli. W załączniku przesyłam film jak to mniej więcej wygląda. Dodam jeszcze, że jeśli chodzi o śmigła i kierunek obrotu silników to tu jest wszystko w porządku. Dodaję jeszcze linka do filmu na google drive bo chyba są jakieś problemy z kodekiem i na forum się nie odtwarza się obraz: https://drive.google.com/file/d/1k2mac0BiPbarq86OQpCiWoeAbd53JctI/view?usp=sharing 1608979546813.mp4 -
Urodziło się jeszcze jedno pytanie - czy GPS muszę podłączać do UART'a krzyżowo ? (tj RX do TX i TX do RX) W instrukcji wyczytałem, że kontrolery na procesorze F7 posiadają jakąś sprzętową inwersję UART w przeciwieństwie do tych na F3 i F4. Czy dobrze rozumuję, że w F7 nie ma znaczenia jak podłącze urządzenie do UARTa ? i mogę podłączyć RX do RX a sprzęt sam sobie odwróci ?
-
Mam rozumieć, że chodzi o BetaFlight ? Oczywiście wspiera RSSI. Jeszcze co do X8R - czy możliwe jest aby posiadał RSSI zarówno po sbusie jak i analogowe na wyjściu ?
-
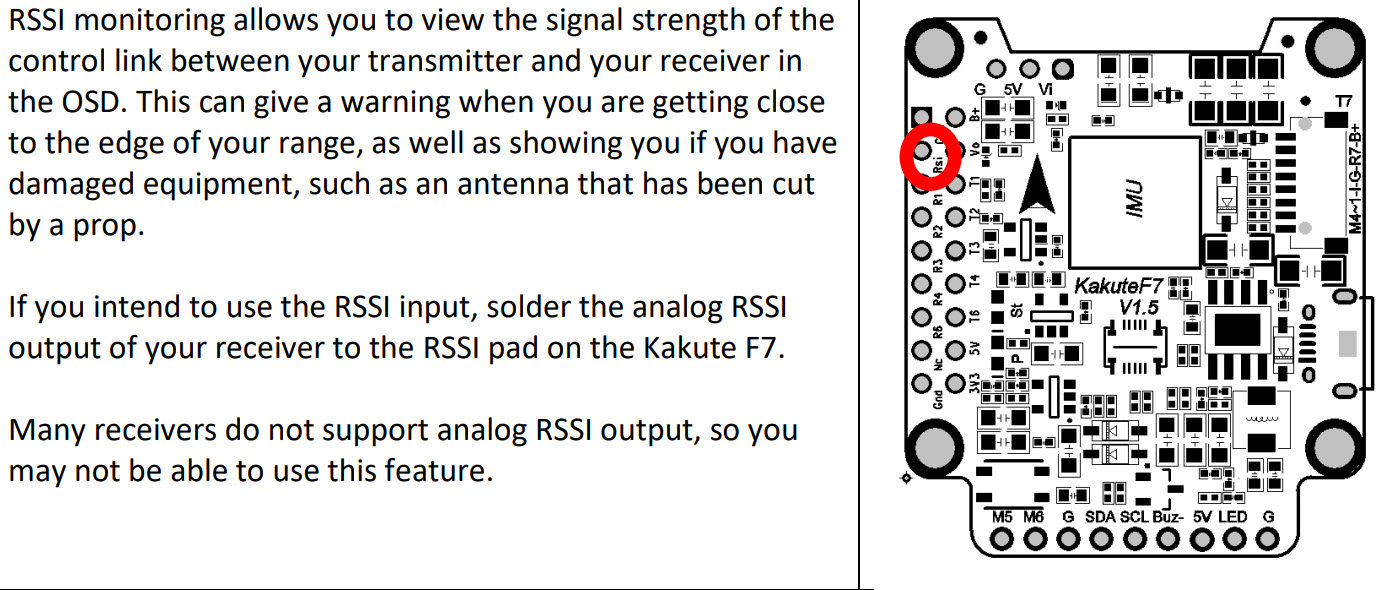
Panowie, czy odbiornik Frsky X8R (ACCST) będzie działał z tym Radiomasterem TX16s ? chciałbym się upewnić zanim go kupie. Jeszcze tak nawiązując do tego odbiornika kierowałem się głównie analogowym wyjściem RSSI - mam rozumieć, że takie wyjście właśnie potrzebuję aby uzyskać informacje RSSI ? Dodam, że chodzi o kontroler Holybro Kakute F7 a instrukcji czytamy:
-
Postanowione, dałem sobie spokój z BN-880 bo faktycznie są z nim problemy. Nawet znajomy nabył ten model i w tym samym miejscu ma dużo mniej satelitów niż na BN-220. Napisałem do Holybro i podali mi kompatybilne moduły GPS jak i kompasu. GPS najlepiej na NEO-M8N (czyli BN-220 świetnie się sprawdzi) a kompas dam po prostu oddzielnie i będzie to takie maleństwo HMC5883 Tak na prawdę to BN880 to nic innego jak dwa oddzielne moduły (GPS i kompas) sklejone ze sobą taśmą dwustronną