LordKris
-
Postów
55 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez LordKris
-
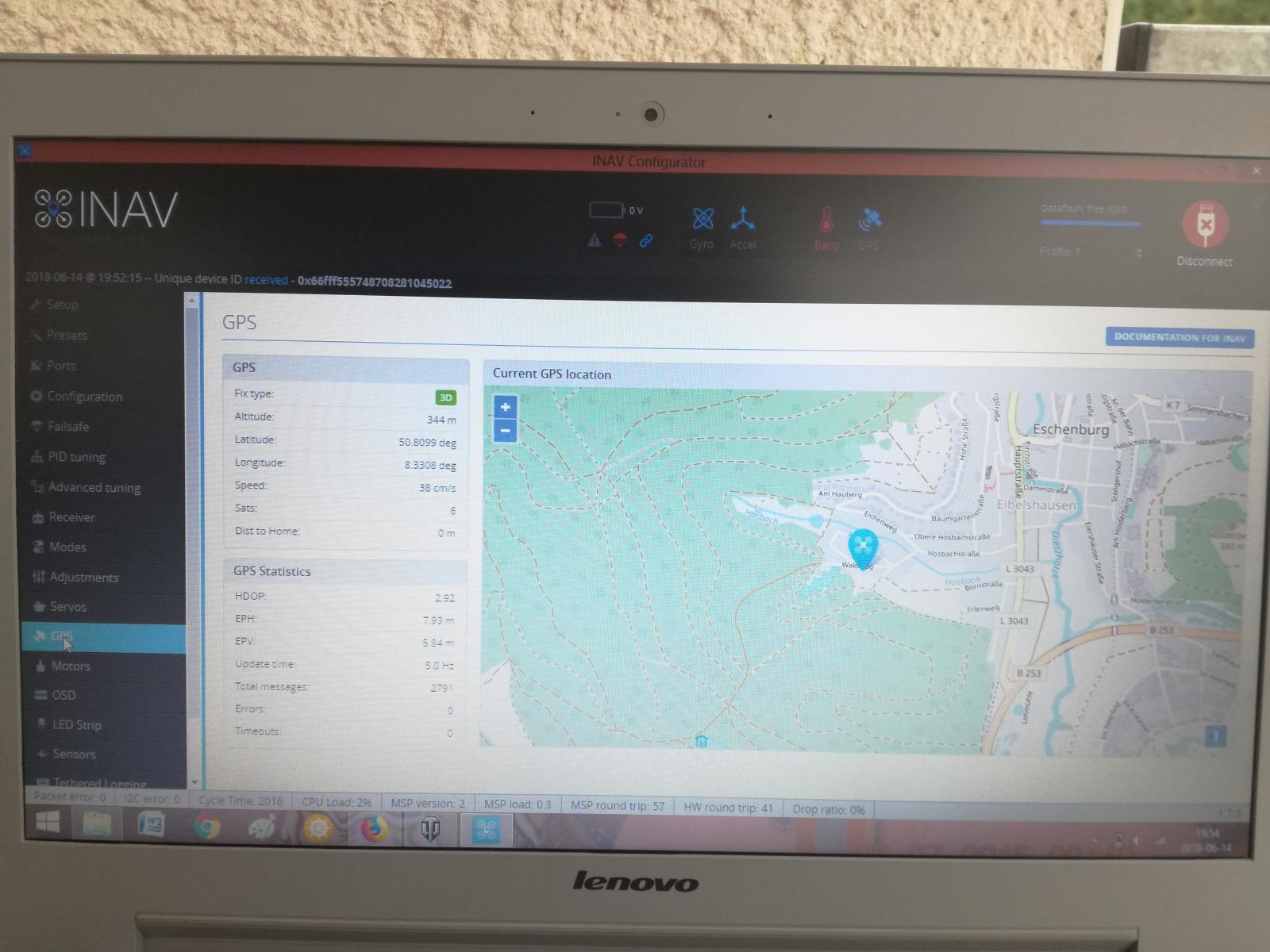
Witam ponownie Dotarło do mnie ostatnio trochę części: - baro BMP280 - GPS U-Blox Neo-7M z dużą anteną - GPS do mini APM (Mini APM FC też zamówiony - Maxiiii mnie namówił ) A teraz do sedna. Wgrałem na jedną płytkę CC3D Inav 1.7.3. i nie bardzo wiem jak to wszystko skonfigurować. Barometr dotarł jako pierwszy więc podłączyłem go do FC przez Flexi (używając napięcia 3,3V) i działa. Następnie dotarł GPS. Po Setupie w U-Center GPS działa po porcie Flexi - nie działa w porcie Main. Może coś mam źle ustawione że to co jest podłączone pod port Main nie działa Na zdjęciu widać ze barometr jest na czerwono - jest podpięty pod Main Port a GPS pod Flexi. GPS działa a baro nie

-
Świetny temat. Ja też lubie dłubać i na pewno będę temat obserwował. Pozamawiałem ostatnio trochę gratów i też chcę sobie zrobić coś innego jak X czy H. Bardzo chodzi mi po głowie V-Tail ale nie taki odkryty jak Hunter tylko bardziej zabudowany. Ja projektuje w Inventorze a jako materiał posłuży aluminium. Jako inspiracja posłużyła Medusa https://www.robotshop.com/blog/en/medusa-project-showcase-12997 Mojego V-Tail chcę zrobić w rozmiarze Huntera 500. Może coś opracujemy razem ??? Ja wykonam ramę z aluminium a ty osłony na 3D. Pracuje w firmie w której mogę sobie wyciąć elementy na laserze i wygiąć w razie potrzeby na maszynie TruBend5170 Na Inventorze dopiero się uczę ale udało mi się narysować górną i dolną część jednego z przednich ramion.
-
o takie 20 A https://www.ebay.de/itm/Emax-simon-series-ESC-Speed-Controller-Regler-6A-12A-20A-25A-30A-40A-BEC-/232196500670?var=&clk_rvr_id=1538489450616&utm_medium=cpc&utm_source=twenga&utm_campaign=twenga&utm_param=eyJlcyI6MCwicyI6NTMzODY0NywiY2kiOiIwNDMwYzI4NWQ0YmYzNTdiNzAzYTA1OTAwMjFlYzY0OSIsImkiOiIyMzIxOTY1MDA2NzAiLCJ0cyI6MTUyNjkzMDMzMCwidiI6Mywic28iOjE1MDAsImMiOjc0MzEyfQ%3D%3D&rmvSB=true
-
czyli takie cuś ??? https://www.ebay.com/itm/Mini-APM-V3-1-Flight-Controller-Board-Upgraded-APM-2-6-2-8-for-DIY-RC-Drone-250/352240973129?hash=item520332b549:g:KHAAAOSwEOpaQxGd i też potem Inav wgrać trzeba ? Odbiornik PWM może zostać ?
-
Nie mam za bardzo ochoty wydawać 60 euro na FC. Ten kosztuje 20 euro z wysyłką - Pytanie czy to co ma jest dobre i warte swojej ceny ?
-
ok. dzięki A co możecie powiedzieć na temat tego FC??? http://shop.seriouslypro.com/sp-racing-f4-neo tylko ten FC obsługuje PPM lub S Bus ? Czy PWM też ? - bo zielony jestem
-
Z tego co Maxiiii napisał kompas jest w GPS który zamówiłem Poczekam na ten GPS i spróbuje to jakoś podłączyć. Najbardziej mi zależy żebym mógł ustawić że dron nie odleci np dalej niż na 200 m i ewentualnie jak coś to po uruchomieniu jakiegoś przycisku/switcha dron wykona funkcje RTH Pytanie - Czy mogę zostać na zwykłym odbiorniku PWM czy lepiej jest przejść na PPM ???
-
Czy taki kontroler ogarnie już bez problemu GPS, RTH, Latanie po punktach itd ??? https://www.ebay.com/itm/OMNIBUS-F4-Pro-V2-Flight-Controller-with-Integrated-OSD-5V-3A-BEC-Current-Sensor/202208397658?epid=13013966589&hash=item2f148f495a:g:04IAAOSw9oNabvMK i czy mogę zostawić odbiornik na PWM czy jakiś PPM mam kupić do tego FC ?
-
Pytanie z innej beczki trochę. Ustawiłem radio na kanale 5 jako GEAR. Jak zrobić że po przełączeniu dźwigni np zapaliły się diody lub Buzzer zaczął brzęczeć ? A najlepiej jakby dało się podłączyć np ProMini.
-
Zainstalowałem sterownik do STM32 i teraz po podłączeniu bezpośrednio pod USB komp widzi płytke na COM7 i Inav już też łączy się bez Arduino, ale w dalszym ciągu nie mogę skalibrować akcelerometru
-
Jak uruchomię program to widzę tylko COM1. Po podłączeniu FC nie ma żadnej reakcji. Działa tylko przez Arduino. Próbowałem też wgrać tą samą techniką co Inav BetaFlight i CleanFlight ale bezskutecznie Warto to zamówić https://hobbyking.com/en_us/illuminati-32-flight-controller-with-osd-cleanflight-supported.html lub https://hobbyking.com/en_us/flip32-naze32-all-in-one-pro.html
-
OK. Wgrałem Inav 1.7.3 używając Arduino Uno i gniazda Main Port na płytce CC3D. Po podłączeniu bezpośrednio przez kabel USB/MicroUSB Inav nie chce się połączyć (nie widzi portu COM). Jak podłącze przez Arduino to płytka łączy się z programem Inav ale i tak nie mogę w tym Inav nic zrobić poza symulacją jak obrazek drona porusza się wraz z ruchem płytki. Nie mogę zrobić kalibracji akcelerometra (6 kroków). Po wciśnięciu kalibracji po chwili w logu wyskakuje komunikat że zakończono sukcesem. Podłączyłem odbiornik do płytki i jakiekolwiek wychylenie drążków nie powoduje żadnej reakcji na ekranie. Może coś zrobiłem nie tak albo w ogóle nie zrobiłem. Nie wiem co dalej
-
A tak jak teraz czekam na ten GPS to napiszcie mi proszę w co jeszcze mogę doposażyć CC3D z Inav 1.7.3. aby poprawić komfort itd
-
ok dzięki. Jutro wgram ten ostatni plik który był wspierany czyli 1.7.3. i pozostało czekać na moduł GPS a którą wersję wybrać PWM czy PPM ??? bo nie bardzo wiem
-
Już chyba wiem jak wgrać Inav na płytkę CC3D ale znalazłem tylko plik 1.7.3. ze strony https://github.com/iNavFlight/inav/releases gdzie najnowszy to jest 1.9.1 ale nie znalazłem 1.9.1. CC3D. Czy 1.7.3.CC3D.hex będzie ok ?
-
ale będzie działać ten FC z tym GPS-em ???
-
Nie potrzebuje jakiś super nowości - trochę polatać - zobaczyć co i jak. Mam nadzieje ze ten GPS podpasuje do tego kontrolera A jak mi się spodoba to i tak tuning od radia musiałbym zacząć. Mam seryjnego FS TH9X
-
Pisałem że CC3D - https://www.ebay.com/itm/CC3D-Openpilot-Open-Source-Flight-Controller-32-Bits-For-FPV-QAV250-Quadcopter/332645499656?hash=item4d73378308:m:mqL4kd7iy-anc_GxRIU35Og
-
Zamówiłem Mini APM Czy gdybym musiał coś zmieniać w oprogramowaniu lub cokolwiek to czy mogę użyć PL2303 jako modułu do połączenia GPS z komputerem. PL2303 używam czasami do wgrywania programu na Arduino Mini.
-
No toś pomógł :D Czyli konkretnie który do zwykłego CC3D - bo te wszystkie mają chyba 5 przewodów a Flexi Port w mojej płytce ma 4
-
Aha czyli że do Arduino ten moduł jest ? No to ten już musi pasować https://www.ebay.com/itm/Ublox-GPS-Module-with-Ceramic-Antenna-GPS-Receiver-TTL9600-for-APM-PIX-PX4-CC3D/322796773301?epid=24015549605&hash=item4b282fdfb5:g:zIwAAOSwhYdZ0QwT Czy znowu źle ???
-
czyli np taki https://www.ebay.com/itm/GPS-Mini-NEO-7M-NEO-6M-Satellite-Positioning-Module-51-for-Arduino-STM32-US/322568351999?var=511552695847&_trkparms=aid%3D222007%26algo%3DSIM.MBE%26ao%3D2%26asc%3D50544%26meid%3Dc422582dab11405383a6fbe58c670b4d%26pid%3D100005%26rk%3D6%26rkt%3D12%26sd%3D332629473039%26itm%3D511552695847&_trksid=p2047675.c100005.m1851
-
Witam. Wczoraj zgubiłem mojego drona. Chcę zrobić nowego z tym że teraz chciałbym go jakoś zabezpieczyć. Można zrobic tak żeby dron nie mógł odlecieć dalej niż np 200m od startu FC to standardowy CC3D https://www.ebay.com/itm/CC3D-Flight-Controller-OpenPilot-Bent-Pin-STM32-32-bit-Flexiport/282313225288?ssPageName=STRK%3AMEBIDX%3AIT&_trksid=p2057872.m2749.l2649 więc co musiałbym odkupić aby mieć taką możliwość? Lub za pomocą jakiegoś przełącznika wrócił do punktu startu-home Wydaje mi się że moduł GPS powinien załatwić sprawę. Tylko jaki ? np: https://www.ebay.com/itm/OCDAY-OP-GPS-Great-for-Openpilot-Mini-CC3D-RC-Flight-Controller-SZW/222727539939?hash=item33db988ce3:g:DRYAAOSwsE1aE97i - jest ok ?
-
Już miałem udać się w podróż do Polski ale sprawdziłem wątek i proszę - trzeba się wytłumaczyć 1. Pakiet - zakupiłem jakiś czas temu nowy z HK jest to Zippy 3S 2200 mAh 30C (albo coś bardzo blisko - był żółty) ale nie na użytek RC tylko do AirSoftu ale z racji tego że nie mieścił się do mojej przerobionej MP5-tki to postanowiłem go rozdzielić. Taśma którą widać służy jako zabezpieczenie pakietu. Mogę do testów założyć inny pakiet 1800mAh 25C 3S Turnigy NanoTech Airsoft 2. Kalibracja - wydaje mi się że jest przeprowadzona prawidłowo. Nie pamiętam dokładnie ale na pewno musiałem najpierw ustawić drążek na minimum potem na maksimum i znowu na minimum - dopiero silnik zaczął reagować na drążek gazu. 3. Luty i przewody - jedyny słaby punkt jaki widzę w tej konfiguracji to silnik - przewody wychodzące z silnika są bardzo cienkie. Przewody zasilające ESC to 16AWG a przewody z pakietu to 14AWG. Wtyczka to tzw T-conector To tyle w sprawie wyjaśnień Pozdrawiam
-
Zabrałem ze sobą kilka śmigieł i jedno z nich wygląda tak I też szału nie było Masz racje sławek z tymi śmigłami ze to sa SF ale najlepszy rezultat jaki uzyskalem to bylo na śmigle 10x8 SF ale niestety uszczerbiło się a miałem tylko jedno takie. Niestety jutro jadę do Polski - żonę i córkę z wakacji odebrać więc ze skrzydełkiem będę walczył po weekendzie. Na razie dziękuje za Wasze cenne wpisy i do później Pozdrawiam