suchar222
-
Postów
11 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez suchar222
-
Zaznaczanie punktów trasy z poziomu aparatury.
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
A odpowiedni kierunek to ??? Równolegle do łodzi ? -
Zaznaczanie punktów trasy z poziomu aparatury.
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
Czy umiejscowienie gpsu na dziobie łódki może robić taki problem? Czy kompas mogę sprawdzić w następujący sposób?: Porównanie w mission planner kompasu z kompasem w telefonie? (Samsung s9+)
-
Zaznaczanie punktów trasy z poziomu aparatury.
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
No dobra wszystko rozumiem. A jak bym zmiksował kanał żeby ustawiać auto? Mam jeszcze taki problem że łódka w trybie RTL wraca w dziwny sposób. Płynie zygzakiem /\/\/\ W taki sposób że prawy silnik działa .... za chwilę wyłącza się i pracuje lewy, A prawy przestaje. I tak na zmiane.... Jakieś porady ? Sugestie ? -
Zaznaczanie punktów trasy z poziomu aparatury.
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
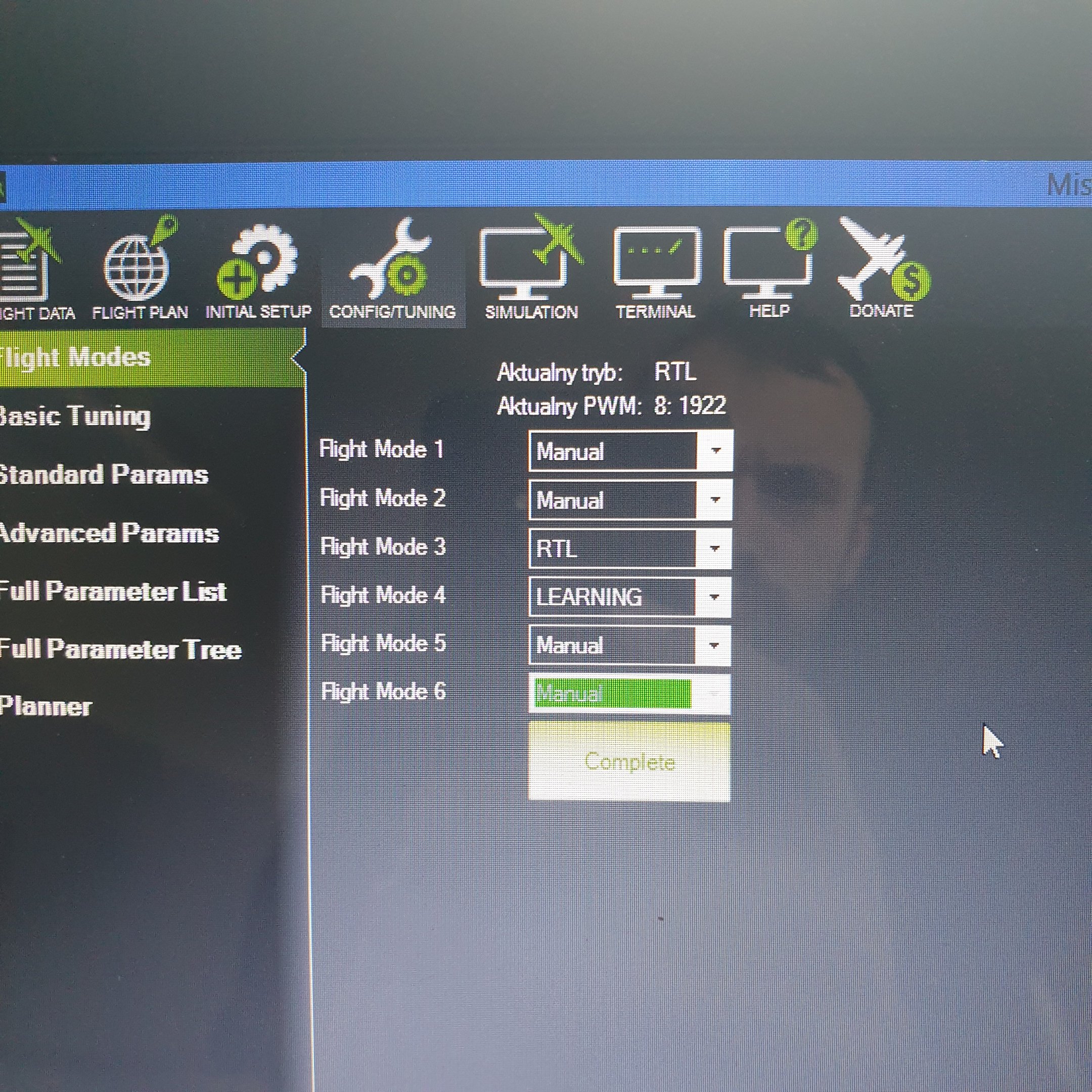
A w jaki sposób mogę włączyć auto? U mnie przycisk 3 pozycyjny reaguje na Light mode1 (manual) , 4 (Learning) ,6 (RTL) Czy w jakiś sposób mogę podpatrzeć dodane punkty ?
-
Zaznaczanie punktów trasy z poziomu aparatury.
suchar222 opublikował(a) temat w Elektronika platformy
Witam. Łódka zanętowa Sprzęt : APM 2.6 , gps N8M + telemetria Aparatura Radiolink10 II Podłączenie: Odbiornik 1->1AMP input Odbiornik 3->3 AMP input Odbiornik 5->7 AMP input Odbiornik 7->8 AMP input silnik 1 ->1 AMP output Silnik 2 ->3 APM outout Lewy drążek pływanie do przodu/do tyłu Prawy drążek skręcanie prawo/lewo Przełącznik 3 pozycyjny (SWC) W mission planner zakładka failsafe reaguje Radio 8 (1090/1506/19922) Flight Modes: MANUAL/LEARNING/RTL Przełącznik 2 pozycyjny (SWB) W mission planer zakładka failsafe reaguje Radio 7. Łódka pływa skręca, tryb RTL działa. Słyszałem że jest możliwość dodawania punktów trasy z poziomu aparatury i żeby łódka płynęła do zaznaczonego punktu. Po takiej konfiguracji i podłączeniu nie wiem jak to włączyć. Czy tryb LEARNING służy do tzw. Nauki ? Czyli włączam tryb LEARNING, płynę do wyznaczonego miejsca i go wyłączam. Wracam łódką do brzegu włączam tryb AUTO i sama powinna płynąć do wcześniej pokazanej trasy? Dobrze to rozumiem? Po co jest ten przełącznik SWB wpięty w APM skoro nie zmienia żadnych trybów? No chyba że czegoś nie zauważyłem. Mam zamiar w końcu doprowadzić Łajbę to stanu WSZYSTKO DZIAŁA Proszę o pomoc. -
Jakiej używasz aplikacji na tablecie?
-
Failsafe AMP 2.6 Flysky FS-TH9X
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
Dziekuje -
Failsafe AMP 2.6 Flysky FS-TH9X
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
Czy Radio Radiolink 10 II spełni moje oczekiwania? Chce wiedzieć z poziomu aparatury volty,Czy Apm złapał sygnał gps? Czytałem i wydaje mi się że tak.... -
Failsafe AMP 2.6 Flysky FS-TH9X
suchar222 odpowiedział(a) na suchar222 temat w Elektronika platformy
Czyli w moim rozumowaniu ,radio za ktore zapłaciłem nie małe pieniądze, jest gorsze od popularnego flysky 6? Ktore jest 2x Tańsze? Mam taki sensor. Nie mogę ustawić żeby wyświetlał mi na Aparaturze volty. I nie ustawię ? Bo moduł 2.4Ghz jest zewnętrzny i nie ma przesyłu dwu-kierunkowego?
-
Witam. Sprzęt : Aparatura: Flysky FS-TH9X Odbiornik : FSiA10B AutoPilot : AMP 2.6 Wiem że był bardzo podobny temat ale z aparaturą Flysky 6. U mnie problem jest taki: Odbiornik ch3->ch3 input AMP. Wydaje mi się że robię coś nie tak....?
-
Witam Wszystkich Serdecznie. Składam łódkę zanętową :)