emil1129
-
Postów
49 -
Rejestracja
-
Ostatnia wizyta
-
Flaszkę na pewno trzeba kupić. Nie ma innej opcji. Po tym wypadku wypadku zaczynam myśleć nad telemetrią do mojego Phantoma.
-
Dużo to za mało powiedziane macie jakiś pomysł co zrobić ,, na wszelki wypadek"?
-
Mialem bardzo duże szczescie... Dron na autopilocie wyladowal w miejscu nad którym troche latalem wczesniej....dzis znalazl go wujek z kombajna bo chodzilem do kazdego kombajnisty z okolicy. Wszystko sprawne. Jedynie akumulator moze byc do niczego ale niby się probuje ladowac. Ale to tylko akumulator... ja poszedłem w miejsce gdzie widziałem ostatnio na kamerze, a ten leciał z jakieś 50-100m od mojego punktu startowego. Może gdybym nie odszedł to bym go jakoś uslyszal i widział. ..nigdy więcej czegoś takiego. Ulga na sercu jak nie wiem co... Mam nadzieje ze to się nie powtórzy. Dobrze ze biegam to chociaż nie było problemu z szukaniem i wspinaniem na drzewa. Teraz aby sprawa baterii to był leciutko ukurzony od koszenia ale to pikus gdy jest sprezarka. Mobius i nadajnik FPV sprawny, dron nie ma problemu z lotem. Mogę dziękować Bogu i niezawodnym oczom wujka i hamulcom w jego sprzęcie. Jedyne co mnie ucieszyło to działa mocowanie do kamery i jest mało drgan..
-
Tylko teraz straciłem ten sprzęt i kompletnie nie wiem co robić. ..
-
-
-
Wczoraj na filmie obraz nie był za dobry, ale dziś jest raczej lepiej https://m.youtube.com/watch?v=QB1M9XuMEr0
-
https://youtu.be/WNi5QHSN-70
-
Problem z lotem quadrocoptera na MultiWii 0.6.3
emil1129 odpowiedział(a) na emil1129 temat w Multikoptery
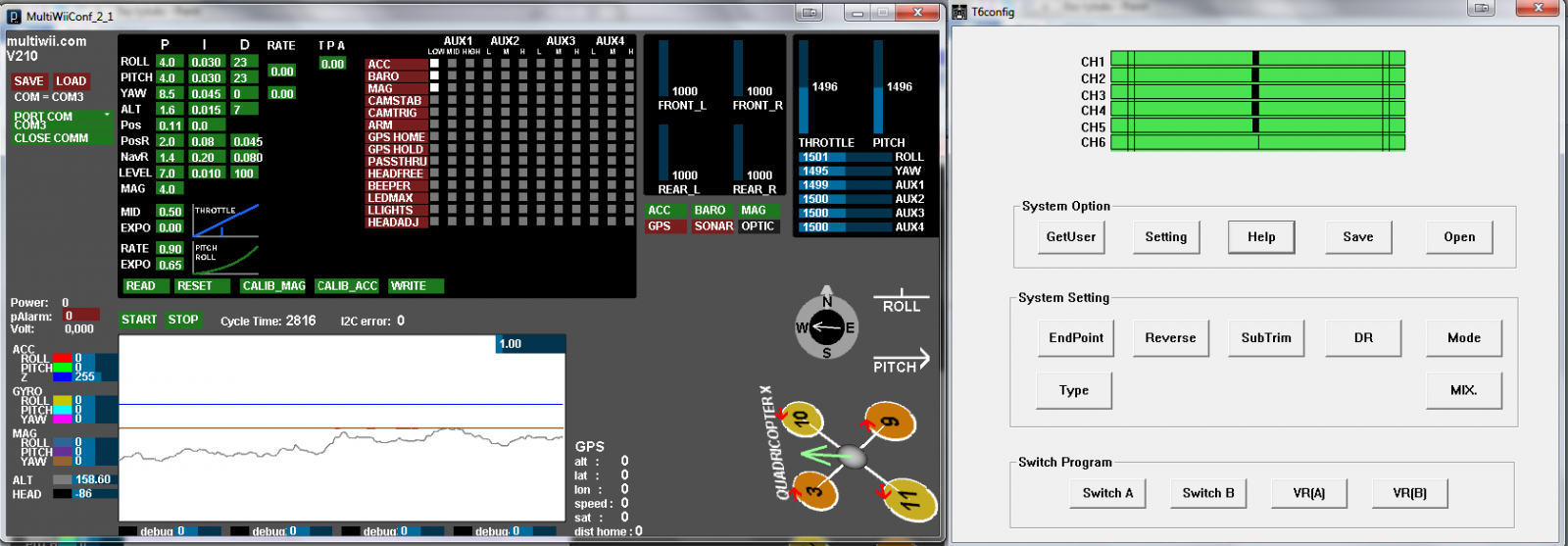
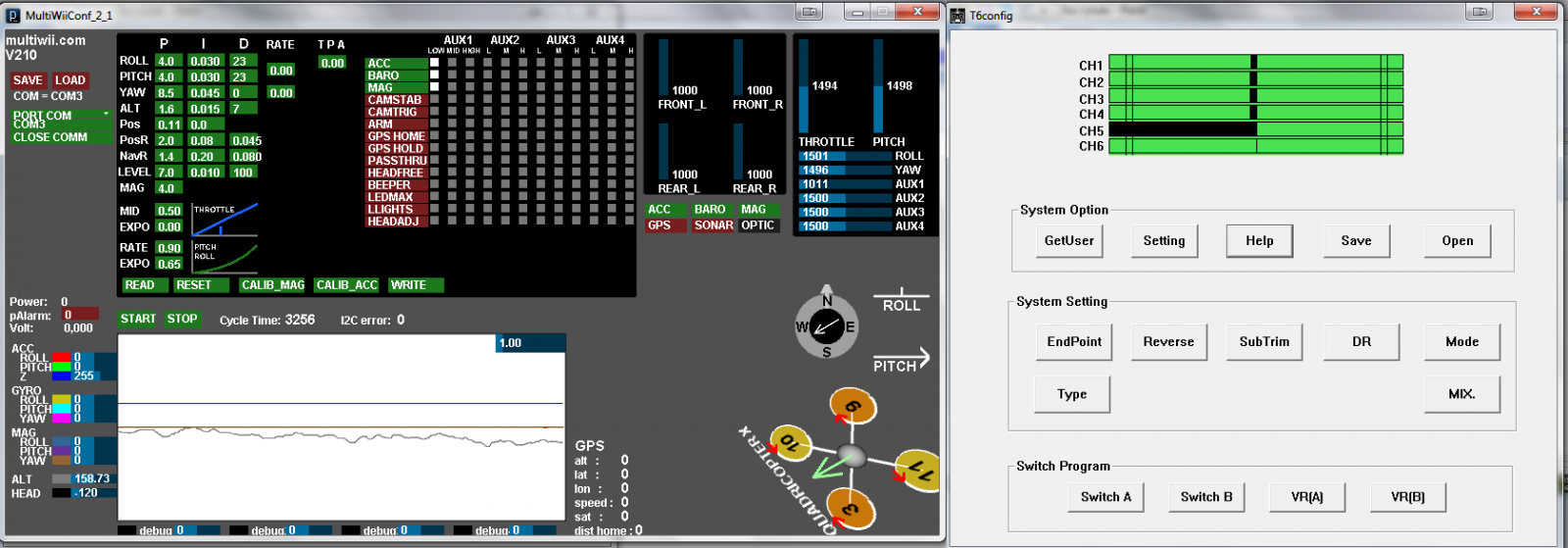
Prawie rozwiązałem poprzednie problemy z ACC. Ale niestety straciłem ustawienia z aparatury jak w temacie do F450.Endpoint i subtrim w t6config zrobiłem, ale nie wiem co należy zrobić z DR, MixMode i switch'ami na samym dole. Będę wdzięczny za pomoc Chyba dałem radę to naprawić. Ale jaki może być powód tego, że maszyna ciągle ucieka przy starcie w tył, a jak się uniesie to leci na ślepo w dowolną stronę ? -
Witam, prawie rozwiązałem poprzednie problemy z ACC. Ale niestety straciłem ustawienia z aparatury jak w temacie do F450.Endpoint i subtrim w t6config zrobiłem, ale nie wiem co należy zrobić z DR, MixMode i switch'ami na samym dole. Będę wdzięczny za pomoc
-
Witam, po prawie roku przerwy w wolnym czasie powróciłem do quadrocoptera. Sprzęt ten sam co był przedstawiany wcześniej. Wszystko przygotowałem do lotu i od 2 dni próbuję się wzbijać w górę. Ale niepokoją mnie pewne sprawy. Na początku dodam zdjęcie z programu MultiWii i T6config. Z wyłączonym ACC: Z włączonym ACC: W programie jest wszystko zgodnie z instrukcją, wartości środkowe drążków w okolicy 1500. Bez problemu mogę w nim skalibrować magnetometr i akcelerometr. Niestety ,,dryfuje'' kompas. A główny problem jest taki, że przed lotem ustawiam wszystko na komputerze i sprawdzam parametry. Wychodzę następnie na otwarte i w miarę równe pole i drążkami od aparatury mogę skonfigurować tylko GYRO. Podczas prób wznoszenia kopter przechyla się ,,do tyłu'' i w prawo, mimo że nie kombinuje nic na drążkach ale ostatecznie muszę bo strasznie go chwieje. Nawet gdy uda mi się podnieść do góry to zaraz zaczyna uciekać w bok, dziś przy lekkim wietrze uciekł w przód z 15-20m, mimo że nic nie ruszałem i tylko był gaz dodany. Wiem, że to nie NAZA, ale żeby aż tak leciał na ,,ślepo'' ? Dla mnie to dziwne i od razu zmniejszyłem gaz i na razie jest bez szkód. Czym może być to spowodowane ? Czy to wina płytki, może tego, że nie mogę w polu skalibrować ACC, czy raczej głupiejący kompas ? Dziękuję za odpowiedź i pozdrawiam

-
Witam, po prawie roku przerwy w wolnym czasie powróciłem do quadrocoptera. Sprzęt ten sam co był przedstawiany wcześniej. Wszystko przygotowałem do lotu i od 2 dni próbuję się wzbijać w górę. Ale niepokoją mnie pewne sprawy. Na początku dodam zdjęcie z programu MultiWii i T6config. Z wyłączonym ACC: Z włączonym ACC: W programie jest wszystko zgodnie z instrukcją, wartości środkowe drążków w okolicy 1500. Bez problemu mogę w nim skalibrować magnetometr i akcelerometr. Niestety ,,dryfuje'' kompas. A główny problem jest taki, że przed lotem ustawiam wszystko na komputerze i sprawdzam parametry. Wychodzę następnie na otwarte i w miarę równe pole i drążkami od aparatury mogę skonfigurować tylko GYRO. Podczas prób wznoszenia kopter przechyla się ,,do tyłu'' i w prawo, mimo że nie kombinuje nic na drążkach ale ostatecznie muszę bo strasznie go chwieje. Nawet gdy uda mi się podnieść do góry to zaraz zaczyna uciekać w bok, dziś przy lekkim wietrze uciekł w przód z 15-20m, mimo że nic nie ruszałem i tylko był gaz dodany. Wiem, że to nie NAZA, ale żeby aż tak leciał na ,,ślepo'' ? Dla mnie to dziwne i od razu zmniejszyłem gaz i na razie jest bez szkód. Czym może być to spowodowane ? Czy to wina płytki, może tego, że nie mogę w polu skalibrować ACC, czy raczej głupiejący kompas ? Dziękuję za odpowiedź i pozdrawiam
-
Nie znam się bardzo jeszcze na takiej elektronice, a w internecie nie mogłem znaleźć, jaki moduł GPS można by zamontować w tym kontrolerze. Czy ktoś mógłby mi pomóc ?
-
Sprawdziłem i była zaznaczona ta opcja al e teraz po podpięciu jako kamera internetowa robi się ,,kisiel'' a obrazie. PS. Już wiem co było nie tak, w funkcji kamery internetowej zaznaczyłem H.264 + audio, w rezultacie nie było ani tego, ani tego
-
Może masz rację sprawdzę wieczorem. Pewnie dlatego tak dzieli te pliki.