





PioDabro
-
Postów
268 -
Rejestracja
-
Ostatnia wizyta
Odpowiedzi opublikowane przez PioDabro
-
-
A kompas skalibrowales prawidlowo?
Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Sprawdz czy w MP jak ustawisz kopter przodem na polnoc to zolta i czerwona linia na mapie wskazuja polnoc czy gdzies w bok/do tylu. I czy obracaja sie zgodnie z kierunkiem obrotu koptera.
W jakien wersji masz APM?
Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Jak masz zamocowany GPS? Zdjecie daj.
Poszukaj w parametrach jest gdzies na pewno opcja zeby silniki stawaly na throttle na minimum. Przydatna funkcja przy lądowaniu w stabilize.
Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Jak jestes w domu to raczej normalne ze wzgledu na kiepska dokladnosc GPS w pomieszczeniach

Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Śmigła się nie odkrecają
Przetestowalem swój gimbal i jest cacy.
. Zero jelloWytaptapane z Nexusa 4
-
Wszystkie silniki są Chińskie
Ja mam te czerwone a'la DJI 920KV i latam na HQPropach 1045 i jest całkiem przyjemnie.
Wytaptapane z Nexusa 4
-
Taka do audio też może być, one są 1:1. Jeżeli nie będzie działać to być może trzeba będzie rozciąć i zamienić gorące żyły w kablu lutując je na przemian.
Ale na 99% będzie działać taki audio. To jest sygnał analogowy 1V więc ten kabelek audio podejdzie bez problemu. -
Niestety dopiero w piątek gimbal wydrukowałem i poskładałem do kupy, więc nie miałem czasu polatać.
Musiałem projekt gimbala trochę przerobić bo silniczki które kupiłem mają dziwny rozstaw śrubek zamiast 16/18mm mają 16/19mm.
No i jeszcze muszę wydłużyć nieco go w pionie, bo ma małe kąty ROLL, a miejsca na dole jeszcze sporo więc centymetr niżej da większe możliwości, a nie zaszkodzi.
No i trzeba by jakąć rączkę z lipolem wymyślić żeby móc gimbal w ręku używać. I do tego jakiś sprytny system montażu, żeby łatwo było przekładać. Coś jak w GoPro Karma -
Co do gimbali to i ja się swojego dorobilem.

Wytaptapane z Nexusa 4
-
Dałbym jakieś łożyska na oś. Wtedy nie będzie się otwór powiększał, a łożyska rozłożą siłę na większą powierzchnię. Do tego śruby 10.8 i długą rurkę stalową. Będzie nie gniotsa nie lamiotsa ????
Jak dasz M8 to popularne 608ZZ się nadadzą. 2 szt
Wytaptapane z Nexusa 4
-
Druga seria antenek:
wyszły lepsze pod względem esetetycznym i technicznym:
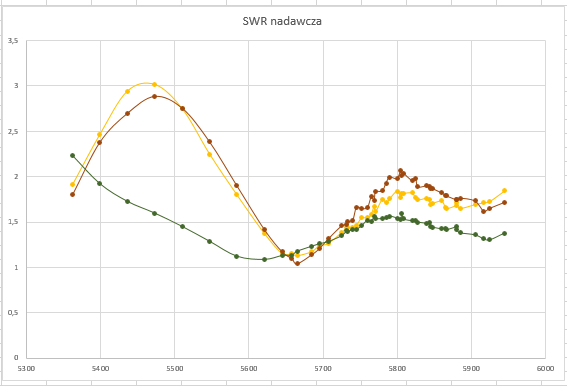
Nadawcza: użyteczna w zakresie 5600 - 5750 MHz
Odbiorcza: użyteczna w zakresie 5700 - 5850MHz
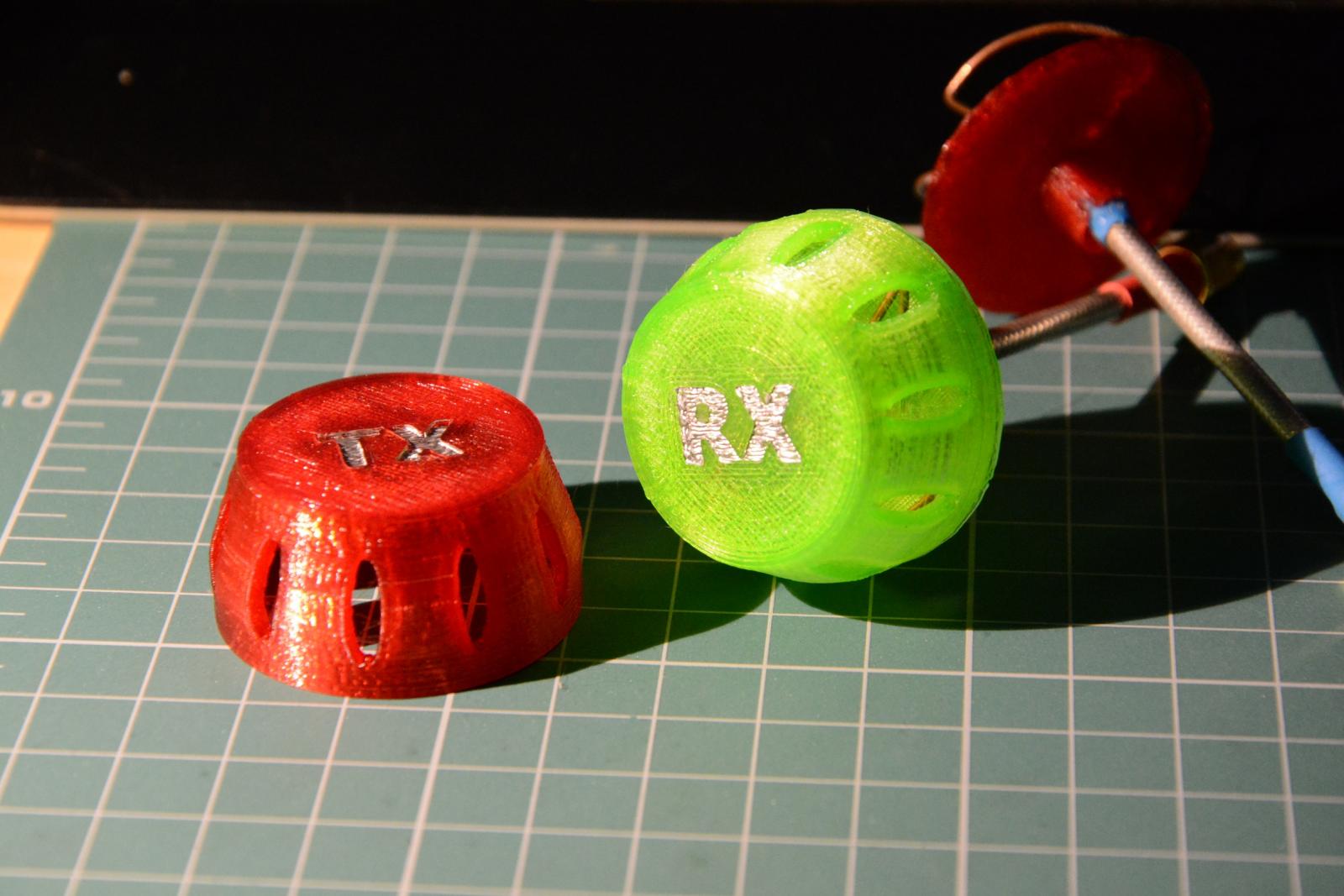
A tu jeszcze mała zmiana w kapselkach
-
Dobrze że poleciał.
Co do złącz różnego typu to ja unikam jakichkolwiek niepotrzebnych złącz. Gdzie mogę to lutuje. Zasilanie power Module lutowane w ramę, ESC z silnikami lutowane, ESC z ramą lutowane.
Niezawodność tych połączeń jest kluczowa. Warto też zadbać o ciasne podłączenie wtyczek RC i kontrolera. U mnie siedzą tak ciasno, że ręką ciężko wypiąć, najczęściej kończy się na użyciu małych szczypiec.
Jedyne złącze na liniach zasilania to złączka baterii na przewodzie gdzie wpinam baterię. Złączka typu T Dean. Dobrze siedzi nigdy mi się nawet nie poluzowala.
Wytaptapane z Nexusa 4
-
Regulatory i silniki możesz sprawdzić podpinajac prosto do odbiornika w kanał gazu. Jak dla mnie coś masz nie tak z APM.
Wgraj mu firmware od ArduRover i na nowo ArduCopter. Ustaw ramę na X itd.
Potem kalibruj wszystko po kolei - acc, kompas, radio, ESC itd.
ESC zrob metodą wszystkie na raz. Sprawdź ustawienia ESCow. Później wrzuce Ci instrukcje od tych żółtych ESC. Tam się je konfiguruje za pomocą gazu w aparaturze.
Potem nie montujesz śmigieł tylko przez MP sprawdź czy się równo kręcą w zakładce Motor test.
Wytaptapane z Nexusa 4
-
To z telefonami to bardziej Trick serwisów. Na śrubach są naklejki które pod wpływem wilgoci zmieniają kolor. Na ogół zmieniają kolor nawet bez zalania płynami, a pod wpływem wilgoci z powietrza. Serwisy odmawiają wtedy naprawy bo niby zalany był.
Wytaptapane z Nexusa 4
-
Wywal te chińskie złote złączki i zlutuj na stałe. Ja przez taką złączkę miałem kreta bo silnik przestał pracować. Ruszył dopiero po rozłączeniu i podłączeniu. Teraz wszystko lutuje na stałe i problemów nie mam.
Wytaptapane z Nexusa 4
-
Ale nie mają bardzo fajnych funkcji jak GPS, kompas itp. A w przypadku nauki bardzo się przydaje choćby zwykły powrót do domu jak zgubimy orientację. Do nauki latania itp na początku nie potrzeba FPV, za to pomocne będą funkcje utrzymania wysokości itd. Które w tych zabaweczkach są o kant d otłuc.
Wytaptapane z Nexusa 4
-
Wyważenie silników i śmigieł to jedno, szczególnie że te tańsze nie da się tak do końca idealnie wyważyć.
Ale ja osobiście zmieniłbym gumki na miększe albo sprawdził jak gimbal zachowa się podczepiony na trytytkach zamiast na sztywno.
Próbowałeś tą metodą z linku? Jest bardzo dokładna.
-
Drugi test i jest gorzej niż było, gimbal niby dobrze przymocowany, ale wibrację w tym miejscu większe, jakieś pomysły?
Wyważ silniki i śmigła.
Polecam wypróbować
http://rc-fpv.pl/viewtopic.php?f=11&t=23976
Co prawda stronka tam podana nie istnieje ale w razie czego mam kopię flashowej aplikacji w wersji .exe
Zamiast podanego tam modułu może być ADXL335 (jest dostępniejszy i tańszy)
-
Radio, może trimy jakieś ma poustawiane. Niech wyzeruje trimy na radiu.
-
kalibracja ESC!
-
Zapomniałem dodać na końcu zdania: jak te zabawki wymieniane wcześniej
Wytaptapane z Nexusa 4
-
Ja bym na twoim miejscu kupił zestaw do montażu np. Popularny F450 z Chin za 100$.
Zestaw już jest na dość dobrych bebechach: silniki 920KV z nakrętkami CW i CCW, kontroler APM 2.6, GPS z kompasem, i wszelakie akcesoria montażowe (nogi, stojak pod GPS itp.)
Do zmontowania tego potezeba umiejętności lutowania i czytania ze zrozumieniem. W razie problemów koledzy z forum pomogą a sprzęt będzie 3 półki wyżej niz wszelkie omawiane tu gotowce.
Do tego dokup radio np. FlySky FS-i6 za około 40$.
Łącznie zmieścisz się w 500zl, a sprzęt posłuży długo i jak dobrze zmontujesz i skonfigurujesz to nie odleci do producenta przy pierwszej lepszej okazji.
Edit
Zestaw np. Ten
http://s.aliexpress.com/UnYzueiU
Wytaptapane z Nexusa 4
-
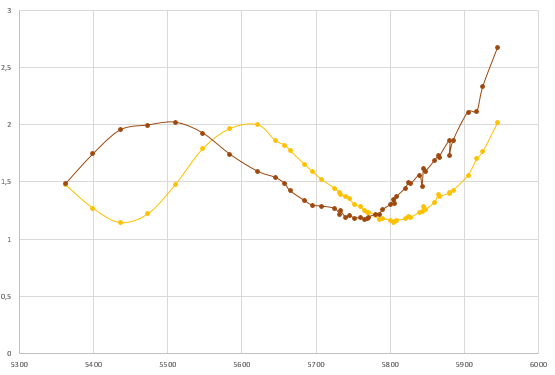
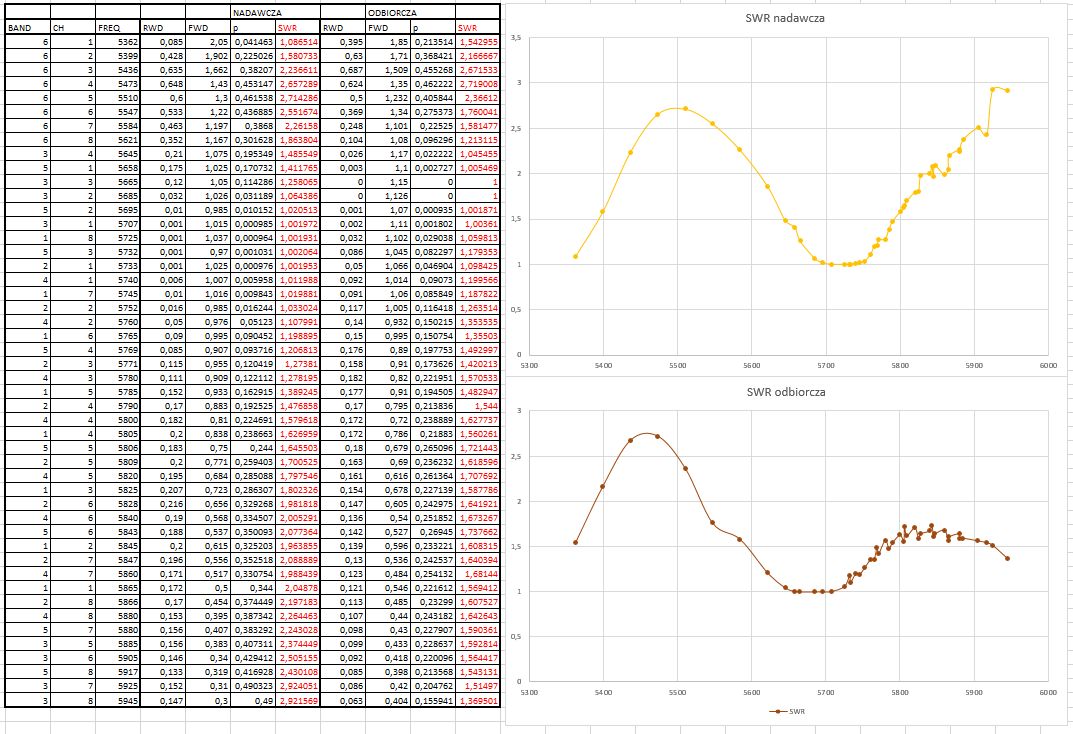
Mały updejt na temat antenek FPV.
Zrobiłem dziś pomiary metodą DIY.
Wyniki wyszły sensowne więc narzędzie działa prawidłowo
Przyrząd pomiarowy:
Wyniki pomiarów:
-
Podobno dobre rezultaty są na izolatorze pod FC. Tym takim złożonym z 2 plytek i 4 niebieskich gumek. Widziałem wideo zrobione na takim zestawie to było elegancko.
Wytaptapane z Nexusa 4





FlySky FS-i6/Turnigy i6/itp. - przeróbki
w Aparatury RC
Opublikowano
Antena o wiekszym zysku o ile jest dopasowana do nadajnika bedzie miala lepszy zasieg. Ale nic nie dzieje sie kosztem niczego. Gdy uzyjesz anteny o wiekszym zysku tym węższą masz charakterystyke kierunkową, czyli jezeli dobrze bedziesz celowal antenami to poplyniesz daleko, ale na innych ulozeniach bedzie znacznie gorzej. Cos za cos. Mozna uzyc anteny kierunkowej zamiast bacika (np jakiegos biquada) i celowac nia zawsze w model wtedy zysk jest wiekszy.
wtedy zysk jest wiekszy.
Wysłane z mojego Nexus 4 przy użyciu Tapatalka