PioDabro
-
Postów
268 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez PioDabro
-
Konfiguracja trybu RTL w APM i opcje w FlightPlanner
PioDabro odpowiedział(a) na mass temat w Multikoptery
1. Tutaj: http://ardupilot.org/copter/docs/rtl-mode.html podano: RTL_ALT_FINAL: The altitude the copter will move to at the final stage of “Returning to Launch” or after completing a Mission. Set to zero to automatically land the copter. The final return altitude may be adjusted from 0 to 1000 centimeters. Czyli jak 0 to ląduje, jak nie 0 to wisi. Czas zawisu jest na wysokości RTL_ALT. 2. Jak masz w metrach to podajesz w metrach. -
Mixów dalej jest trzy. Natomiast dochodzą dodatkowe ustawienia switchy w kanałach AUX. To znaczy że do kanałów aux możemy przypisać pojedyncze switche lub sumy dwóch switchy: SwA, SwB, SwC, SwD, SwA+B, SwB+C, SwC+D i SwA+D
-
W UE żeby handlować aparaturą radiową wystarczy znak CE I to nie ten co oznacza China Export tylko tylko ten drugi.
-
Ma znaczny wpływ, tylko pewnie odbiornik ma 2 anteny i nie udało Ci się trafić w złe położenie anteny nadajnika względem tych w odbiorniku. Odleć na ten 1000m i pokręć radiem, zobaczysz, że w pewnym momencie zgubi zasięg.
-
Polecam obejrzeć np. ten film: https://www.youtube.com/watch?v=JBK4zYgEhrA o polaryzacji mówione jest od około 12 minuty. Tutaj gość prawi ogólnie na temat anten, ale bardzo dobrze pasuje to do naszych anten w modelach. Większość nas wszak stosuje albo drucik ćwierćfalowy albo dipol (tak tak, w tych plasikowych antenkach jak od WiFi jest dipol ) a w 15 minucie jest powiedziane dlaczego nie celujemy anteną w model
-
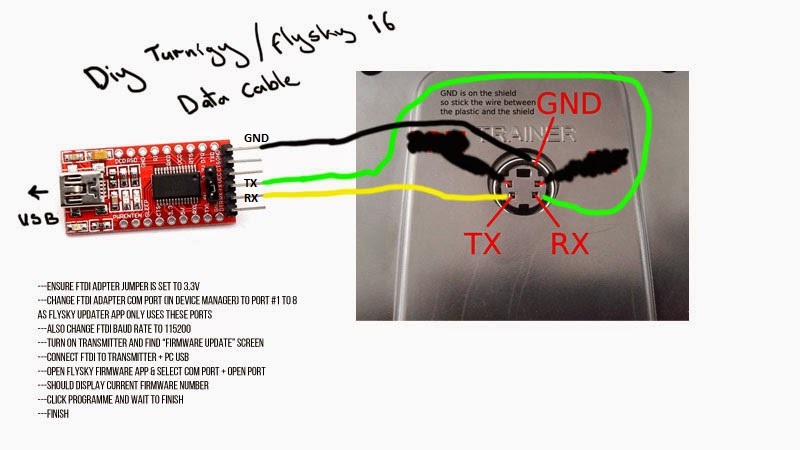
Przeróbka jak najbardziej bezpieczna. Napięcie masz wtedy na aparaturze na wyświetlaczu. Po zmianie softu apki na ten 10ch masz możliwość ustawienia alarmu napięcia. Jak dla mnie lepsza opcja od wiszącego na dronie pipczyka z wyświetlaczem. Przynajmniej na bieżąco wiesz ile jeszcze polatasz Zmiana softu jest banalna: wystarczy mieć przejściówkę USB - RS232 (np. popularny FT232RL) z logiką na 3.3V (lub na 5V + translacja napięć). I kilka(trzy) kabelków połączeniowych do goldpinów z tym że z jednej strony gniazdo a z drugiej pin. Potem na komputerze stąd: https://github.com/benb0jangles/FlySky-i6-Mod-/tree/master/10ch%20Mod%20i6%20Updater Pobieramy najnowszą wersję i odpalamy jako admin plik .exe i postępujemy według wskazówek z tąd: https://github.com/benb0jangles/FlySky-i6-Mod- Soft ten działa bezproblemowo z odbiornikiem FS-iA6 (tak jak oryginał). Pomysł z naklejką z trybami lotu bardzo dobry, ja na pamięć wiem gdzie i co U mnie endpointy to 80% i 70% i jest bardzo dobrze. Odczyt napięcia przez odbiornik spokojnie ogarnia pełne napięcie naładowanego 3S, ludzie pisali że kończy się trochę poniżej pełnego 4S, ale wytrzymuje bez problemu 4S. Ja osobiście podłączyłem pomiar tylko do 1szej celi pakietu (mniejsze przekłamanie - ok. 0.05V) i ustawiłem alarm na 3.4V Działa to bardzo fajnie i choćby z tego względu dobrze jest zrobić obie modyfikacje . Dodatkowe kanały planuję wykorzystać do włączania różnych opcji. 7my np służy do uruchamiania AutoTune lub AutoTrim (zależnie od ustawienia w MP). Z racji tego że mam kamerkę z serwem na Tilt to drugi potencjometr służy mi do sterowania pochyleniem kamerki. Więc u mnie wsztystkie 6 kanałów jest zajęte. Fajnie jest mieć np. RTL lub Land pod osobnym przełącznikiem. APM sam w sobie ma tylko 8 wejść więc zostają nam jeszcze 2 bezpośrednio z nadajnika, można je wykorzystać do np. zrzutu cukierków lub szybkiego odcięcia zasilania (przy nieudanym lądowaniu) lub wyzwolenia kamerki. Możliwości jest mnóstwo trzeba tylko uruchomić wyobraźnię

-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Heh, moja wyważarka też jest o kant D rozbić. Co do śmigieł to: Wysokość piasty: 7.8mm Średnica otworu: 8mm. W zestawie redukcje na 5mm i 6.2mm Śmigła ładnie pasują na silniki DJI(a raczej podróbki ) 920KV. O te te właśnie
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Zanabyłem na Ali karbony: http://www.aliexpress.com/item/2-Pairs-HJ-Carbon-Fiber-1045-10-4-5-CW-CCW-Propellers-Prop-for-F450-F500/32534210861.html Właśnie przyszły dzisiaj. Ważą tyle samo co komplet HQProp 10x4.5 Wykończenie trochę niezbyt piękne (miejscami widać ślady po szlifowaniu) Ale jak za tą cenę są ok. Wszak zapłaciłem za nie mniej niż 35zł za cały komplet. Śmigła niestety są do wyważenia. Mają podszlifowania jakby były wyważane już, ale niedostatecznie. Ja osobiście wolę wyważać lakierem do paznokci zamiast szlifować - lżejszą stronę lekko maluję na końcu, jak za mało do kolejną warstewkę aż będzie ok. Śmigła są bardzo sztywne. Dużo bardziej od HQProp.
-
Na pewno jest to ciekawe zagadnienie, ale skoro FC potrafi stabilizować lot do góry nogami, to na pewno potrafi i z niego wyjść http://ardupilot.org/plane/docs/inverted-flight.html
-
Ułożenie anten ma bardzo duże znaczenie w każdym sterowanym radiowo modelu (niezależnie od częstotliwości). Dla tych co nie za bardzo wiedzą o co chodzi proponuję poczytać o polaryzacji fali i o tym w jakich kierunkach rozchodzą się fale z jakich anten. Wystarczy obejrzeć obrazki nawet i dla wielu wszystko będzie jasne. Według mnie najlepszym systemem jest taki, co posiada przynajmniej dwie anteny i układ różnicowy, który wykorzystuje silniejszy sygnał. Wtedy możemy nadawać i odbierać w różnych polaryzacjach i kierunkach odpowiednio układając anteny zarówno nadajnika jak i odbiornika.
-
Zwykle kontrolery mają tryb Acro dający wszelakie manualne możliwości sterowania, ale też posiadają jedną ważną zaletę -> tryb failsafe który wróci do punktu startu w przypadku zerwania połączenia z radiem.
-
No to zrobilem moda do mierzenia pakietu. Rozklejamy plastik jak na foto i demontujemy plastik na pinach lekko podwarzajac raz z jednej raz z drugiej strony. Zdjety plastik Przecinamy sciezke jak na zdjeciu Na upartego da sie to zrobic bez rozklejania obudowy. Do + kanału pierwszego podłączamy nasz pakiet. Dla 3S dało radę zmierzyć pełne napięcie pakietu, choć wolę pojedynczą celę ze względu na mniejsze przekłamanie pomiaru (wartość mierzona przez odbiornik różni się o 0,05V od tej mierzonej przez multimetr dla jednej celi, dla całego pakietu jest znacznie gorzej). Zasilanie odbiornika ze wszystkich pozostałych + poza właśnie kanałem 1. PS fs-ia10 zamowiony
-
Dokładnie taki kupiłem gdzieś na allegro. Doń lutujesz rezystory i robisz w ten sposób z niego skokowo przełączany potencjometr. Ot cała technika. A ja niedługo zabieram się za przeprogramowanie mojego fsi6 Kurde 10 kanałów w gratisie :D Tylko odbiornik zamówię //EDIT - nowy firmware wgrany, tylko wgranie kasuje ustawienia radia wszelakie.
-
A gdzie się podział post z filmikiem?
-
Ewidentnie brakuje fazy na silniku. Te wyprowadzenia z silnika pod izolacją mają druty emaliowane. Trzeba wystające koncowki dobrze oskrobać żeby kontaktowały. Jeżeli je skracałeś to musisz je oczyścić. Dobrze też by było pocynować i trochę podgrzać lutownicą żeby wypaliła się reszta izolacji na końcówkach. Ja cynujac podgrzewam przy temp około 320 stopni aż dobrze się cyna osadzi na końcówce. Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Wgrywając firmware ustaw na taki jak masz, czyli quadro w układzie X.
-
A jak instalowałeś soft do APM to jaki typ koptera wybrałeś, bo mi to pachnie wybraniem tricopter'a...
-
To jako test, odepnij ten silnik od APM i wepnij bezpośrednio pod odbiornik w 3 kanał. Throttle daj na max i odpal prąd, jak ten jeden zapika melodyjkę a potem szybko dwukrotnie to throttle w dół. Potem sprawdź manetką gazu czy się wkręca na obroty. Jeżeli zacznie działać to znaczy że coś z wyjściem z APM. Jeżeli nie działa dalej to znaczy że coś z reglem.
-
Ale jak silnik pika? Takie krótkie piski z około 1 - 2 sekundowym odstępem?
-
Kalibracja ESC zrobiona? Może być też błędny sygnał z APM. Bo jak ESC pika silnikami to znaczy że coś mu się nie podoba w sygnale... Jeżeli silnik się nie kręci, a tylko drga, ale nie pika to coś z połączeniem (brakuje jednej fazy).
-
Góra stojaka też jest metalowa, ale z aluminium i mam wrażenie że ta śrubeczka też, ale zawsze można zamienić śrubeczkę na klej Aluminium nie będzie przeszkadzać kompasowi.
-
A jak z burzą geomagnetyczna? Sprawdzałeś? Ma być quiet jak chcesz latać, inaczej są problemy z GPS i kompasem. http://www.n3kl.org/sun/noaa.html
-
Zmiana GPS nic nie da, bo to nie GPS'a wina tylko kompasu w module z GPS'em. Kompas w każdym module z GPS jest taki sam (ten sam układ scalony). Poszukałbym problemów w mocowaniu, sprawdź czy nie przekręca się od drgań. Sprawdź czy w pobliżu kompasu nie masz żadnych stalowych elementów, śrubek itp. Każdy ferromagnetyk w pobliżu kompasu zakłóca jego działanie.
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Kolejna ciekawostka dla Was. Zrobiłem sobie telemetrię przez WiFi. Jest to znany moduł ESP8266 (wersja ESP-07). Do tego płytka z stabilizatorem napięcia i rezystorami podciagajacymi odpowiednie piny do + i masy. W Mission Plannerze używamy połączenia TCP wpisując adres IP modułu i port (w moim przypadku 31 - wykorzystałem firmware o nazwie esp-link) Do tego z ali zamowilem sobie link SiK Radio. Też fajnie to działa. -
No niby można pasywny pikacz dać i modulować sygnał. Na razie szukam głośnego buzzer'a. Sam układ nie będzie raczej skomplikowany.