PioDabro
-
Postów
268 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez PioDabro
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Problemem nie jest gwint, a to co znajduje się za gwintem - za wąski otwór w plastiku. U mnie bardzo ciężko się wkręcały śrubki, ale udało mi się wszystkie wkręcić do końca. -
Za słabo dokręcone, czy się rozpadło??
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Z tego co się orientuję to są to M2.5×5 o standardowym skoku Tu manual od oryginału: http://www.pelikandaniel.com/dld/F450_user_manual_v1.8_en.pdf Chińskie się zbytnio nie różnią poza samym wykonaniem i elektroniką. -
Robiłeś ponownie kalibrację kompasu? kalibrację przeprowadź z dala od sprzętu elektronicznego/elektrycznego. Także z dala od stalowych elementów, i linii energetycznych . Najlepiej wyjść gdzieś na dwór. Polecam zajrzeć do środka obudowy GPS i zobaczyć jak ułożony jest scalaczek z kompasem. To ten z opisem L883. U siebie wrzucałem informacje jak jest ułożony dla ROLL_180. No i przekręcać należy całym dronem razem z GPS, nie samym GPSem. W APMie jest też żyroskop który informuje APM o zmianie kierunku. Kompas dodatkowo wspomaga żyroskop w celu uzyskania punktu odniesienia. APM łączy dane z obu układów.
-
Zacznij od tego miejsca http://pfmrc.eu/index.php?/topic/58482-zestaw-z-chin-quadcopter-f450-z-apm26-relacja/?p=599049
-
Witajcie, szuakjąc nieco informacji o systemach LRS natknąłem się na pewny temat na RCgroups. Otóż sposób na tani systemik 443MHz z PPM, działający pod openLRSng. http://www.rcgroups.com/forums/showthread.php?t=2114859 Teraz mam pewne plany wobec tego. Jako iż zamówiłem już potrzebne rzeczy: Parę(w sensie 2 szt) modułów Si4432 za 4.59$ //EDIT 2 sztuki Arduino Pro mini 5V 16MHz 1.5$ za sztukę. Dlaczego Arduino 3.3V 8MHz a nie 5V 16MHz? Niestety musi być 16MHz. Niby w kodzie jest wersja na 8MHz, lecz jest ostrzeżenie, że powinna być to wersja 16MHz. Zatem oprócz arduino należy stosować pomiędzy Si4432 a Arduino konwersję napięć. Zerknąć należy do karty katalogowej Si4432. Wyraźnie jest tam napisane, że zasilanie max jest 3.6V, a sygnały VDD + 0.3V czyli max 3.9 pod warunkiem, że zasilamy z 3.6V Dodatkowo przeglądając kod openLRSng można zauważyć, że przygotowany jest pod obie wersje 8 i 16MHz. Dlatego, aby nie musieć się bawić w dodatkową konwersję napięć warto mieć wersję 3.3V. W planach mam zrobienie płytki, do której montażem przewlekanym przylutuję Arduino natomiast powierzchniowym po drugiej stronie dam moduł Si4432. O postępach będę informował w tym temacie. Na koniec dorzucam schematy pochodzące z RCGroups. Nadajnik odbiornik

-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Z jednego loga wylapalem zakłócenia na RC. Uruchamiało to FS od RC. Mam tylko logi z telefonu. Pospieszyłem się trochę z resetem APM i tam niestety nic nie zostało. Ale z tych z telefonu ładnie widać alarmy. Prawdopodobnie zakłócenia RC - Bluetooth Trzeba zapolować na jakiś telemetry na 443MHz Wytaptapane -
Zerknij do mojego wątku Zestaw z Chin. Jest tam trochę informacji o tym jak ustawić antenę GPS z kompasem. To jest ważne. Prawdopodobnie to jest twoim problemem. Kolejną rzeczą która rzuciła mi się w oczy jest antena RC pod GPSem. Ja bym ją przymocował w innym miejscu. Nie wiem co jest zatopione pod koszulką ale wszelkie magnetyczne materiały (np stal) powodują błędne działanie kompasu. Wytaptapane
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Quadcopter odbył dziś swój dziewiczy lot. Niestety jakieś problemy miał. Wznosił się tylko w trybie Stabilize. Po przełączeniu w AltHold od razu przełączał się w Land. Lądowanie też mu coś nie wychodziło, zaczęło go znosić i pod koniec troszku orał śmigłami, na szczęście nic im się nie stało. Na szczęście udało mi się go przełączyć z Land na stabilize i go opanować. Na AltHold nawet nie dał się uzbroić, tzn. uzbrajał się i zaraz rozbrajał. Zachowanie miał takie jakby mu FailSafe zadziałało. Tylko w sumie nie za bardzo wiem dlaczego. FS od baterii wyłączony był, jedyny włączony był od nadajnika, ale nadajnik był ok. Informacji dostarczył mi Tower(coś ala Droid planner, tylko od 3DR) w telefonie (połączony przez Bluetooth do telemetrii). Pierwsze co zrobiłem po powrocie to czysty firmware wgrałem. Czas go pokonfigurować od 0 bo w międzyczasie mogłem coś nagmerać. Skoro na AltHold nie chciał polatać, to tym bardziej nie miało sensu Loiter itd... Co do kompasu, porównałem położenie jego z położeniem tego z APM2.5 i wychodzi na to, że kabelek to jest tył anteny. W ustawieniach kompasu trzeba ustawić ROTATION_ROLL_180. Ponieważ względem normalnego położenia jest obrócony do góry nogami w kierunku ROLL. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
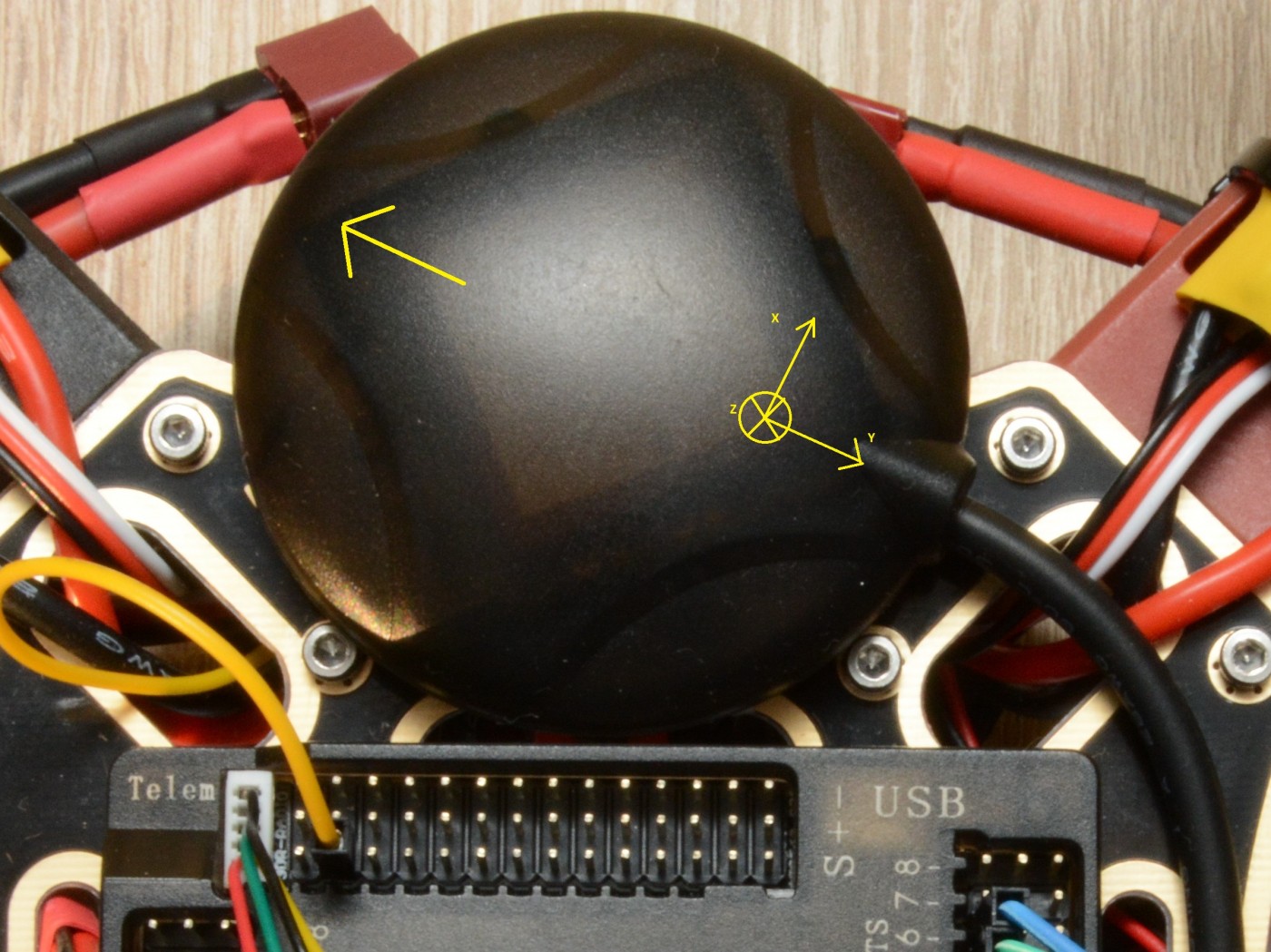
APM jak ustawiasz zewnętrzny kompas ma domyślnie ROLL 180 stopni ustawiane (to by się zgadzało, bo obracasz wokół Y - układ do góry nogami). Najlepiej patrzeć na ułożenie samego układu magnetometru (ma oznaczenie L883) i względem niego ustawić antenkę. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
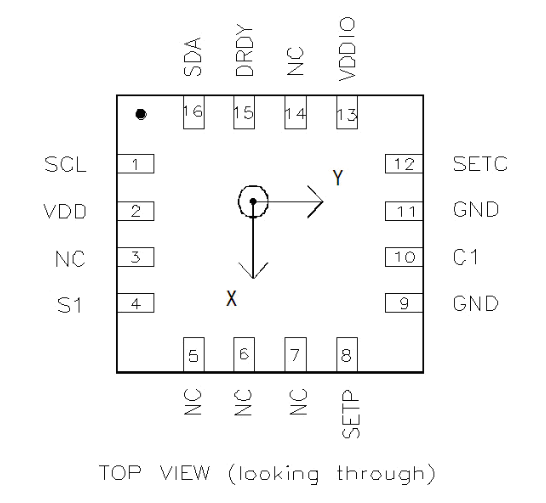
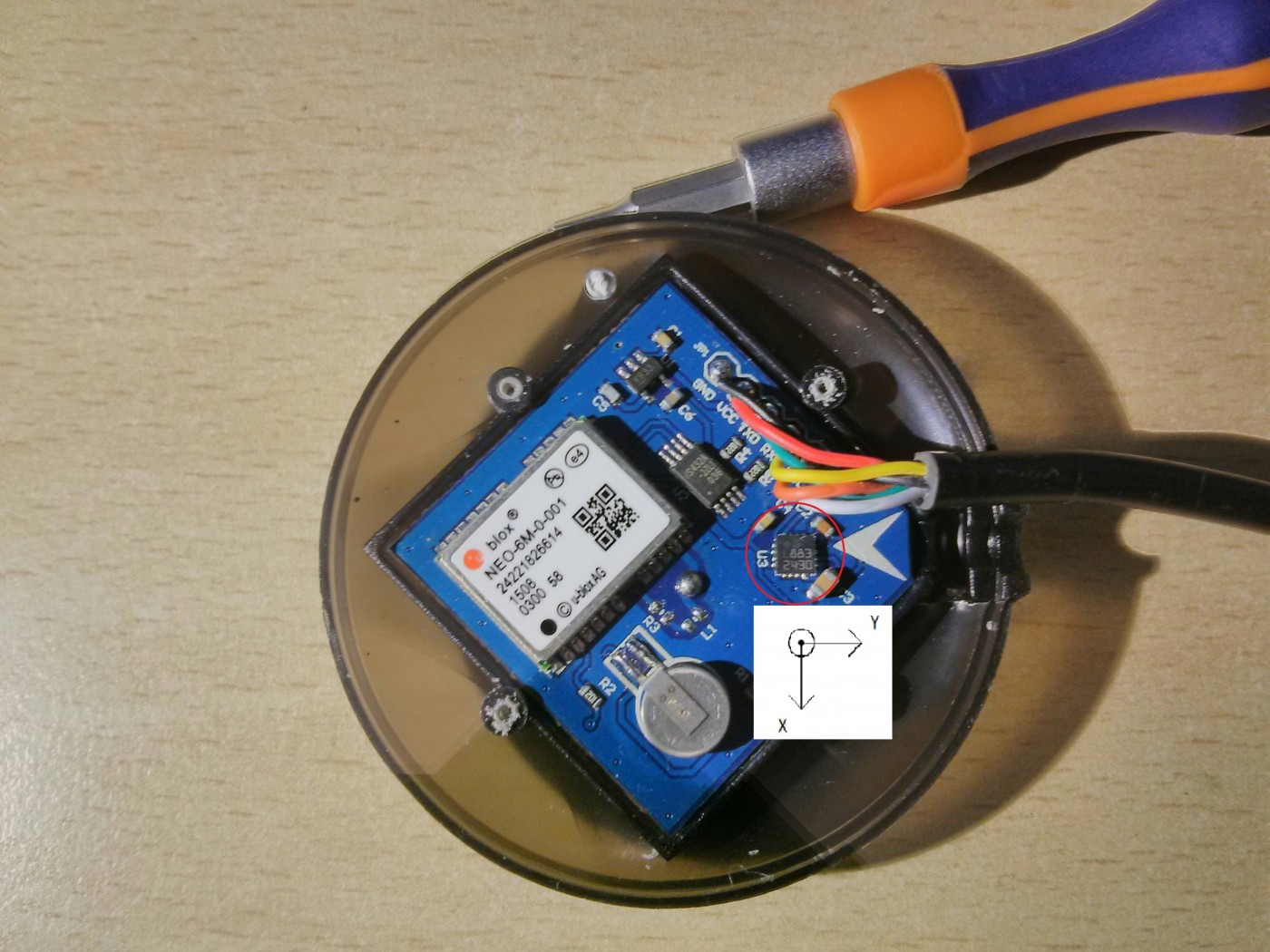
Zrobiłem mały research. Na obudowie mojego GPS'a nie ma żadnej strzałki itd... Po rozkręceniu dopiero na płytce widoczna jest strzałka. Obok niej znajduje się też sam kompas. Zgodnie z notą katalogową kierunki jego są następujące: (kółko z kropką w środku oznacza, że oś Z jest skierowana do góry) Na zdjęciu poniżej płytka GPS z magnetometrem. (naniosłem tutaj osie z noty katalogowej) Jest to widok od spodu płytki (po drugiej stronie jest antena GPS). Co za tym idzie nasz magnetometr jest obrócony o 180 stopni wokół osi Y. Czyli patrząc od góry na nasz cały moduł GPS osie wyglądają tak: (kółko z X w środku oznacza, że oś Z jest skierowana do dołu) Ta dodatkowa strzałka pokazuje kierunek zaznaczony na płytce. Teraz trzeba to porównać np. z APM2.5 który ma oryginalnie akcelerometr na płytce. Dzięki temu będziemy wiedzieli jaką orientację ustawić w naszym APM, i jak umiejscowić antenę GPS. Jak znajdę dokładną informację to dopiszę. PS. W oczekiwaniu na stojaczek pod GPS zrobiłem sobie tymczasowy z pręta gwintowanego M3 i masy dwuskładnikowej. Niestety nie był to dobry pomysł: stal zaburza działanie magnetometru. Nie róbcie tego w domu Stojaczki powinny być z aluminium i tym podobnych metali (niemagnetycznych).
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
1. Prawda, dlatego właśnie zastosowałem oddzielną regulowaną przetworniczkę na LM2596. Ustawiłem na niej napięcie = 5V, ale nie problem troszkę podnieść do 5.3V Przetworniczka ma wydajność do 3A, a zasila tylko APM, GPS i odbiornik, zatem mi prądu nie powinno zabraknąć. Przetworniczkę zatopiłem w koszulce termokurczliwej więc jestem pewien, ze nastawy jej same się nie zmienią. Można też dla pewności zamiast potencometru wieloobrotowego wlutować odpowiednie rezystory. 2. Na stronie Ardupilota jest to wyraźnie opisane. Barometr poza hulającym wiatrem nie lubi też zmian światła, dlatego warto by gąbeczka była w ciemnych kolorach. 3. W sumie o tym nie pomyślałem, że GPS musi też być ustawiony w odpowiednim kierunku. Tutaj też trzeba zwrócić uwagę, że APM2.6 nie ma kompasu sam w sobie, tylko kompas jest razem z GPS'em. Wcześniejsza wersja miała tez kompas zintegrowany. Na moim GPSie nie ma żadnych strzałek itp. Chyba zerknę do środka może na płytce coś namazali 4. Failsafe w przypadku aparatury FlySky FS-i6 jest dość problematyczne bo można jedynie ustawić sygnał od 0% do 100%. Gdzie 0% to około 1000 PWM. Za to w bieżącej wersji ArduCopter'a można zmienić poziom zadziałania FS. Ja temat rozwiązałem w ten sposób, że w aparaturze ustawiłem failsafe na 0% i ograniczyłem z dołu throttle o 10%. Potem ponownie skalibrowałem RC w APM. Dzięki temu podniosłem trochę minimalną wartość w throttle do 1050 PWM, a wyłączenie nadajnika powoduje przeskok do 1000 PWM w APM ustawiłem próg failsafe na 1025. Działa poprawnie Kosztem takiego rozwiązania jest zmniejszenie rozdzielczości sterowania gazem (zakres od 1000 do 2000 zmienia się na 1050 do 2000), ale raczej jest to niezauważalna zmiana. 5. Wibracje: u mnie APM zamocowany jest na kilku warstwach gąbkowej taśmy montażowej. Powinno załatwić sprawę. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Mitar, bateria jak pisałem jest na dolnej płytce w środku, na rzep. Mi odpowiada, tym bardziej że jest chroniona w przypadku kreta. Te Multistary to niby tanie i lekkie ale jakoś mało wydajne. Tylko 10C. Przy 5200 mAh daje max 52A. Moja 3600 mAh daje 72A Jak z ich pojemnością? Rzeczywiście mają te 5200mAh?? Moje silniczki biorą 12A max każdy co daje 48A już na same silniki. Owszem pewnie nie będę używał ich na max wydajności, ale warto mieć zapas Co do dodatków to dodatkowo z Chin do mnie leci: Stojaczek pod GPS'a (2,44$) Nogi w kolorze czarnym (2,39$) 5 par zapasowych śmigieł (4,98$) Wyważarka magnetyczna do śmigiel (w tej chwili wyważone na drucie, zawsze lepiej niż latać na totalnie niewyważonych). (3,42$) Także o nogach i śmigłach już pomyślałem wcześniej. Oby śmigła nie były potrzebne -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
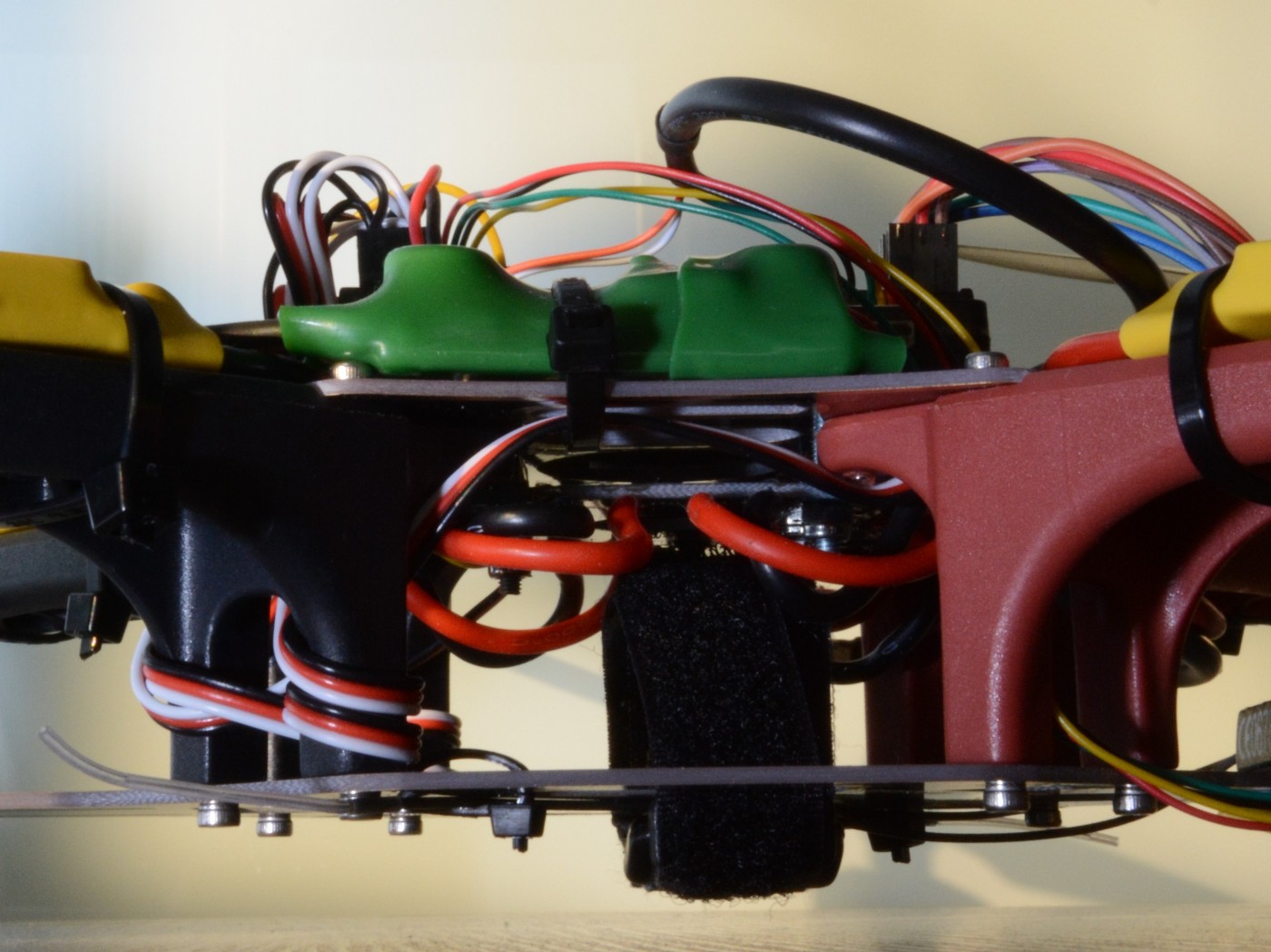
Zestaw od Chińczyka kupiłem ten: http://www.aliexpress.com/item/F450-Quadcopter-Rack-Kit-Frame-APM2-6-and-6M-GPS-2212-1000KV-HP-30A-1045-prop/32402430079.html APM jak APM - działa Jedyne co obudowa trochę słabo spasowana (troszkę trudniej wpiąć ESC i odbiornik w piny, ale za to lepiej się trzymają ) Ale za te pieniądze jakość bardzo dobra. Jeszcze nie zdążyłem nim polatać, jedynie zrobiłem test na uwięzi (patrz foto u góry). Pakiet do niego kupiłem w Polsce - Redox 3S 3600mAh 20C. Teraz kombinuję by zakupić drugi np. Turnigy 5.0 z HK. Ale 1 sztuka z przesyłką wychodzi tyle samo co w PL. Więc na razie odpada. Po drugie po co mi na zimę 2 sztuki ? -
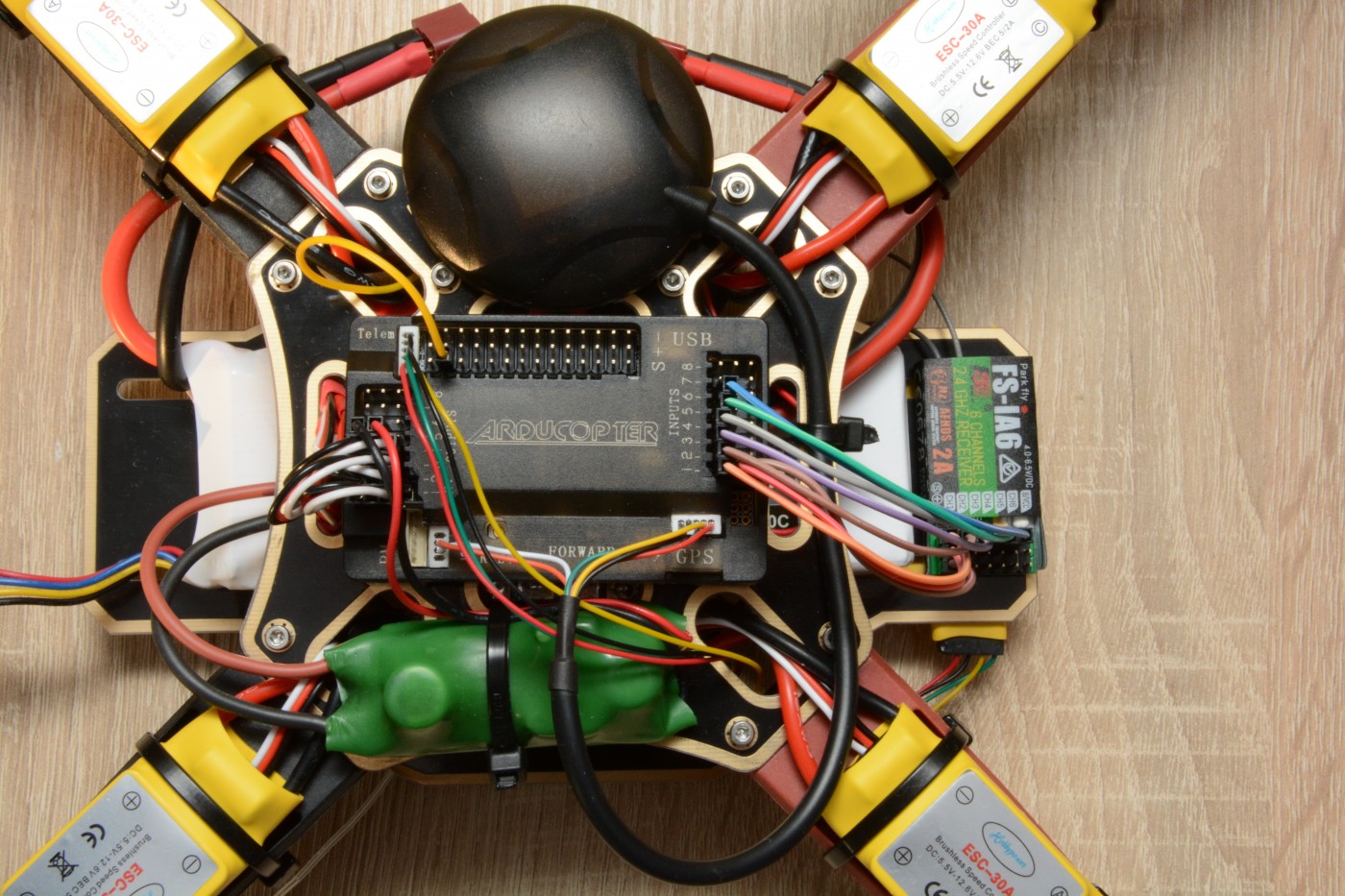
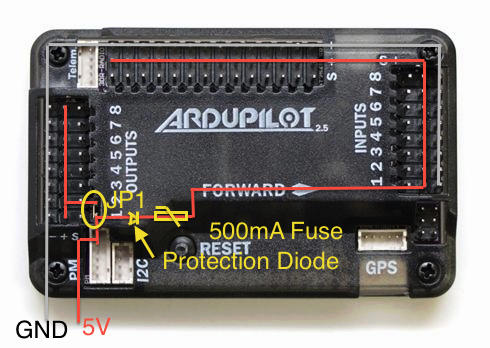
Uwaga dla tych którym nie chce się czytać całego wątku: Po dłuższym czasie w zestawie wymieniłem bardzo dużo rzeczy, gdyż oryginalne są lekko mówiąc trudne w użytkowaniu. Zdecydowanie polecam nie kupowanie zestawu opisywanego poniżej tylko inny, np. ten: https://www.aliexpress.com/item/F450-Multi-Copter-Quadcopter-Rack-Kit-Frame-APM-2-6-7M-GPS-Power-Module-2212-920KV/32476744704.html Jest nieco droższy, ale są w nim dodatkowe elementy które i tak trzeba kupić oddzielnie (nogi, stojak do GPS, PowerModule itp.) Dodatkowo są sporo lepsze podzespoły: silniki (mają inne piasty i nakrętki CW i CCW), rama (sztywniejsze i lepiej wykonane ramiona) Pierwsze co wymieniłem to były właśnie silniki, w tym zestawie poniżej są piasty zaciskowe które niestety odkręcają się w locie. Dodatkowo polecam nie lutować złączek bananowych tylko bezpośrednio ESC do silnika zlutować. Unikniecie niepotrzebnych kretów Witam, ostatnie kilka dni spędziłem na budowie swojego pierwszego quadro. Pierwszym krokiem było zamówienie aparatury i zestawu z Chin. Aparaturę zakupiłem za 40$ podczas promocji 11.11 na Aliexpress. Zestaw części nieco później za 80$. W skład zestawu wchodzą następujące części: (link do zestawu: http://www.aliexpress.com/item/F450-Quadcopter-Rack-Kit-Frame-APM2-6-and-6M-GPS-2212-1000KV-HP-30A-1045-prop/32402430079.html) Rama F450 (kopia tej od DJI ale dość dobrze wykonana z jedną małą wadą ale o tym później). Zestaw silników 4 x A2212/13T 1000KV -> Chińskie ale działają Razem z silnikami byłu mocowania na śmigła. Dwie pary śmigieł nylonowych 1045 12 par złączek "bananowych" Moduł APM2.6 w obudowie (razem z nim przewód do telemetrii i drugi wyglądający jak do PowerModule z tym, że wtyczki za wąskie) Moduł GPS uBlox M6 z kompasem w obudowie Trochę koszulek termokurczliwych Śrubki do ramy (kilka nadmiarowych) Śrubki do silników (też trochę nadmiarowych) Złącze T-Dean 2 przewody silikonowe 10cm (czarny i czerwony) Dodatkowa płytka rozdziału prądu(poza tą w ramie) 4 sztuki ESC Hobbypower 30A Ogólnie wszystko to co na zdjęciu: Pierwsze czynności z nowo nabytym zestawem polegały na przykręceniu ramion do dolnej części podstawy. I tu pojawił się mały problem z jakością ramion. W miejscach gdzie wkręca się śrubki są co prawda tulejki metalowe, ale śrubka jest dość długa. W samą tulejkę wkręcają się dobrze natomiast gdy wkręcamy dalej część śrubek bardzo ciężko szła. Dziurki te są trochę za wąskie, ale wkręcając powoli i z wyczuciem udało się poskręcać model i wszystko pasuje. Jest za to zaleta ciasno siedzących śrub: w locie się na pewno od drgań się nie odkręcą Podczas wkręcania zniszczyłem tylko 1 śrubkę (uszkodziłem gniazdo na imbusa). Na szczęście w zestawie była nadmiarowa ilość. Kolejny krok to montaż silników. Tutaj już bez niespodzianek. Wszystko ładnie pasuje, śrubki odpowiedniej długości, jedynie od siebie dołożyłem podkładki pod śrubki (goły plastik pod spodem). Następnie przymocowałem ESC. ESC zamocowałem od góry, będą się lepiej chłodzić. ESC standardowo zamocowane na "trytytki" Skróciłem nieco przewody od ESC i przylutowałem konektorki. Nie chciałem ich skracać zbyt mocno więc skróciłem także przewody od silników. Następnym raze skrócę tylko te od ESC Przewody od silników to druciki w emalii w koszulce. Ciężko się to lutuje. Natomiast poradziłem sobie z tym podgrzewająć lutownicą odizolowane końcówki przewodów (320 stopni - emalia się wypaliła) na końcu pocynowując je. W efekcie miałem skrócone przewody, ale kosztowało to dodatkową pracę. //Ciąg dalszy 1: Po montażu ESC i silników zabrałem się za lutowanie płytki rozdzielającej prąd. Użyłem oczywiście tej dodatkowej, skoro jest. Do płytki przylutowałem przewodami 4mm^2 złącze na baterię T-Dean. Po bokach przylutowałem przewody od ESC. Po polutowaniu ESC i zasilania zamocowałem górną płytę ramy i skręciłem. Do górnej płyty ramy od dołu przykręciłem tą płytkę prądową. Miała akurat 4 otwory w tych samych miejscach co fabryczne w górnej płytce ramy. Nie musiałem nawet stosować tulejek dystansowych bo płytka ładnie oparła się rogami o plastikowe elementy ramion. Płytkę dokręciłem śrubkami M3 i nakrętkami samokontrującymi (tymi z plastikowym kołnierzem) aby się od wibracji nie poluzowała. Tutaj na foto widać wspomnianą płytkę, niestety nie chcę rozkręcać całości by zrobić lepsze zdjęcie. Początkowo chciałem zamocować kontroler na dolnej płycie ramy, a baterię mocować u góry, ale po przymierzeniu okazało się, że łatwiej będzie zrobić na odwrót. Głównie ze względu na wystające od góry złącza odbiornika RC i ESC. Kontroler do górnej płyty przykleiłem gąbkową taśmą dwustronną. Obok kontrolera w zielonej koszulce termokurczliwej jest przetworniczka step-down z ustawionym napięciem wyjściowym 5V. Służy jako BEC do zasilania APM'a. Odibiornik prąd pobiera z APM'a. BEC'a podłączyłem do wolnych pinów od ESC (zworka JP1 w APM założona). ESC mają wyjęte środkowe piny od ich BEC'ów. Używam oddzielnego, własnego. Odbiornik RC zamontowałem na wystającej do przodu koptera części dolnej płyty ramy, także za pomocą piankowej dwustronnej taśmy. Fotka: //Ciąg dalszy 2: Mając już umocowane wszystko na miejscu, podłączyłem ze sobą wszystkie moduły. Czas na kalibrację. Po podłączeniu do USB i wgraniu firmware'u wykonałem kalibrację akcelerometru. Następnie czas na kompas, tutaj też bez większych problemów się skalibrował. Następnie radio, za pierwszym razem skalibrowałem je tak jak było ustawione. Później nieco pozmieniałem w samym radiu i kalibrowałem je jeszcze raz, ale o tym za chwilę. Na koniec czas na ESC. Tutaj już bez użycia USB. Odpiąłem od komputera i skalibrowałem metodą wszystkie na raz: W radiu ustawiamy throttle na max, podłączamy na chwilę zasilanie (tak z 2s), rozłączamy i podłączamy ponownie. Następnie po piknięciu ESCów throttle w dół. ESC po raz kolejny zapikały. Szybki test unosząc throttle w górę, działa. Jak już wszystko skalibrowałem, czas na założenie śmigieł. Założyłem śmigła i przywiązałem model do stolika kawowego (żeby mi w mieszkaniu gdzies nie pofrunął ) Pierwszy test ze śmigłami szybko wykazał duże wibracje. Po zdjęciu śmigieł na druciku sprawdziłem ich wyważenie: dwa śmigła w porządku, a dwa totalnie do bani. Jedno z nich udało mi się wyważyć podszlifowując spodnią stronę cięższej łopatki. Drugie wymagało niestety naklejenia tasiemki. Użyłem takiej bardzo mocnej żelowej dwustronnej tasiemki montażowej. Tasiemki przykleiłem od góry "po zawietrznej". Dodatkowo 1 z pozostałych dwóch wymagało lekkiego wyważenia ośki. Na ogół polecam od razu sprawdzić śmigła zanim jeszcze je zamontujemy. Foto "wyważonego" śmigła: Po wyważeniu śmigieł wibracje są zdecydowanie mniejsze. Jak dojedzie do mnie z Chin wyważarka magentyczna to wyważe je jeszcze dokładniej. Jeżeli ktoś lata z kamerą to wyważenie śmigieł jest najważniejszą czynnością jaką trzeba wykonać w celu pozbycia się jello. //Ciąg dalszy 3 Po kilku testach i kombinacjach przyszedł czas na małe zmiany w ułożeniu elementów. W międzyczasie przyszły nogi do kopter'a więc przeniosłem baterię pod spód dolnej płytki. Nabyłem także trochę samoprzylepnych rzepów. Odbiornik zamiast piankowej taśmy jest teraz przymocowany na rzec i nieco schowany między górną i dolną płytkę ramy. Dodałem także podwieszoną pod spodem kamerkę z przodu. Kamerka wisi na rzepie oraz zabezpieczona jest trytką. Ustawiona lekko parząc w dół. Przesunięta nieco do tyłu bateria równoważy kamerkę. Czekam jeszcze na stojaczek pod GPS. Ważny element do zwieńczenia całości Ważną rzeczą jest też drobna zmiana napięcia oddawanego przez wspomnianą wcześniej przetworniczkę. Ponieważ po drodze między pinami Outputs a zasilaniem samego APM'a jest dioda która wywołuje mały spadek napięcia. Zasilając APM z założoną zworką JP1 i z pinów od ESC napięcie warto nieco podnieść. Do wartości 5.37V (Taką wartość nominalną podają tutaj: http://copter.ardupilot.com/wiki/common-powering-the-apm2/#power_supply_rails_connected_requirements_jp1_installed). Dlaczego tak? Zmierzyłem sobie napięcie jakie zasila odbiornik. Wynosiło 4.49V co jest minimalnie poniżej dolnej granicy napięć odbiornika. Do tego łatwo wywnioskować ża APM miał takie samo napięce. Dodając to tego zakłócenia od silników i ESC mogło to powodować resety i inne dziwne zachowania APM'a i odbiornika. Podniosłem napięcie do 5.3V i na odbiorniku mam już 4,87V co jest już całkiem akceptowalną wartością. Pamiętajcie jednak żeby nie przesadzić. Wszystko dokładniej opisane jest tu: http://copter.ardupilot.com/wiki/common-powering-the-apm2/#power_supply_rails_connected_requirements_jp1_installed Na obecną chwilę wygląda to tak: Post będę rozwijał dalej innymi słowy mówiąć "Ciąg dalszy nastąpi". Powyższy opis uzupełnię zdjęciami jak je porobię Wybaczcie brak zdjęć z budowy, ale tak mnie robota pochłonęła, że o tym zapomniałem Na koniec kilka zdjęć już zmontowanego quadrocopter'a.
-
Nie chcę być nie miły, ale może warto napisać co było problemem i rozwiązanie? Tak dla pozostałych ?
-
Miałem podobny problem przy pierwszym odpaleniu po konfiguracji. Zrobiłem jeszcze raz kalibrację ESC i pomogło. Kalibrację robiłem metodą "wszystkie na raz" Spróbuj na nowo skalibrować całego APM'a Akcelerometr, Kompas, Radio i ESC. Zrób kalibrację bez wgrywania na nowo firmware'u.
-
Witam wszystkich, forum znalazłem szukając wiedzy na temat składania wielowirnikowca (a dokładniej quadcoptera ). Jestem z Gdańska, na imię ma Piotrek. Kilka dni temu poskładałem do kupy sprzęt na ramie F450. Jest to mój pierwszy tego typu latający model. Jedyne co wcześniej pilotowałem to chiński helikpoterek Syma s107 Wcześniej jeździłem spalinowym modelem typu buggy. Do tegoż modelu stworzyłem sterownik bluetooth - sterowanie za pomocą telefonu (wykorzystując telefon jako kierownicę ) https://www.youtube.com/watch?v=ZxO_cZlN8XY Pozdrawiam wszystkich Na koniec moje pierwsze dzieło Po wyjęciu z chińskiej paczki Poskładany copter Test działania sterowania (copter unosił się lekko nad stołem zachowując poziom mimo trochę przeszkadzających mu sznurków ) Wyszło, że do odwrócenia miałem kanał pitch (przód/tył)