PioDabro
-
Postów
268 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez PioDabro
-
Ale "Amperes per volt" musi być stałe. Zmieniać się może Current (calced). To jednorazowo wylicza się z wpisanego przez Ciebie prądu i zmierzonego przez APM napięcia (w momencie wpisania). Potem do wyliczenia wartości prądu używa tego współczynnika.
-
To napisz tutaj czego nie ogarniasz. Być może ktoś też będzie miał takie same problemy, to będzie se mógł przeczytać. Skajpa nie podam
-
Cóż może zaczniemy od edukacji Na czym polega pomiar pobieranego prądu? Otóż, między + baterii a resztą wstawiony jest rezystor o bardzo małej rezystancji (ten oznaczony na zdjęciu 0m50) Podczas poboru prądu zgodnie z prawem Ohma na tym rezystorze odkłada się niewielkie napięcie zgodne ze wzorem U = R * I (I = U/R, R = U/I) Ponieważ jest ono bardzo małe, dlatego na płytce przylutowany jest taki drobniutki układzik scalony(pewnie oznaczony INA169 ale nie koniecznie). Jest to swego rodzaju wzmacniacz który mierzy to napięcie na końcówkach rezystora. Wzmaczniacz ten wzmacnia to małe napięcie aby na wyjściu podać wartość która jest mierzalna przez kontroler. Zatem w wielkim skrócie prąd mierzony jest poprzez pomiar spadku napięcia na szeregowo włączonym rezystorze między baterią a układem. Teraz wracając do twojego zdjęcia numer 2. Parametr który zaznaczyłeś na fotce ma nazwę "Amperes per volt" Sama nazwa wskazuje, że nie jest to pomiar a współczynnik który mówi kontrolerowi ile amper prądu odpowiada 1V zmierzonemu na wyjściu opisanego wcześniej układu. Gdy chcesz skalibrować pomiar prądu musisz podłączyć jakiś miernik szeregowo w + baterii i zmierzyć pobierany prąd. Ten prąd wpisujesz w pole "Measured current". Pole "Amperes per volt" uzupełni się samo i jest to wyliczona wartość która jest stała Bieżący pomiar masz w polu numer 5 czyli "Current (Calced)" Mam nadzieję że coś rozjaśnił Ci mój opis Pozdrawiam
-
To sprawdź czy odpowiednie kabelki idą do opowiednich pinów w złączu. Może Chińskie Rączki pomyliły kolejność chińskich kabelków. Pomiar napięcia działa poprawnie? Wrzuć prawdziwe foto tego co masz.
-
W sumie taki przełącznik można zrobić w większości aparatur, które mają potencjometry analogowe nie tylko w FS-i6, Warunek jest tylko jeden: Musi się tam zmieścić
-
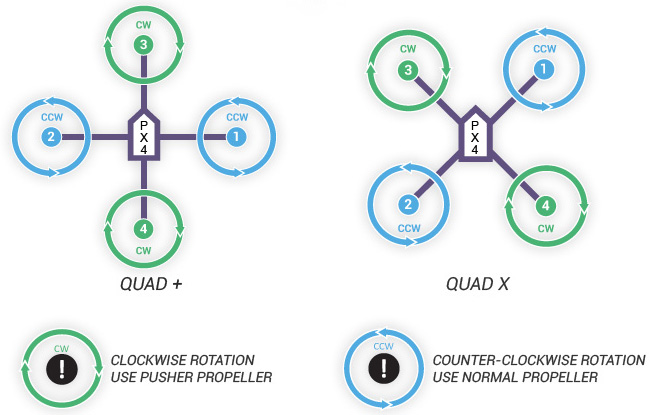
Po pierwsze: "Warning: it is very important to master flying in stabilize before moving on to other flight modes and it is highly recommended that the pilot is always able to easily and rapidly switch back to stabilize mode from other flight modes in case of unexpected or undesirable flight behavior." Czyli testuj pierwsze loty w trybie Stabilize, nie na AltHold czy Loiter itd... Po drugie, lepszym źródłem informacji o kalibracji jest oficjalna strona projektu ArduCopter: http://copter.ardupilot.com/wiki/configuring-hardware/ Masz tam aktualne informacje o konfiguracji. Wykonuj krok po kroku. Pamiętaj żeby najpierw wyczyścić co nagmerałeś (wgrać np ArduRover - wersje dla samochodu, i ponownie ArduCopter). Sprawdź czy dobrze podpiąłeś silniki pod wyjścia APM'a. Kolejność musi być taka: Prawy przedni - śmigło lewe - wyjście 1 Lewy tylny - śmigło lewe - wyjście 2 Lewy przedni - śmigło prawe - wyjście 3 Prawy tylny - śmigło prawe - wyjście 4 Kalibracje rób bez założonych śmigieł. Raczej w kolejności ze wspomnianej wcześniej strony. Kalibracja ESC metodą "wszystkie na raz": Włączasz nadanik, Throttle na max, podłączasz baterię, czekasz aż APM zacznie świecić czerwono żółto niebiesko, odłączasz baterię i podłączasz ponownie, Teraz silniki (oprócz melodyjki i 3 piknięć (oznaczających ilość cel)) powinny zapikać 2 razy. Opuszczasz throttle, Silniki znów zapikają. Wtedy gdy znów podniesiesz throttle zaczną się kręcić, powinny ładnie i płynnie reagować na zmiany. Rozłączasz baterię i ESC są skalibrowane. Napisz jak wykonasz czy da się latać w stabilize.

-
To prawdopodobnie złącze UART do telemetrii, tak ktoś prawił na innym forum.
-
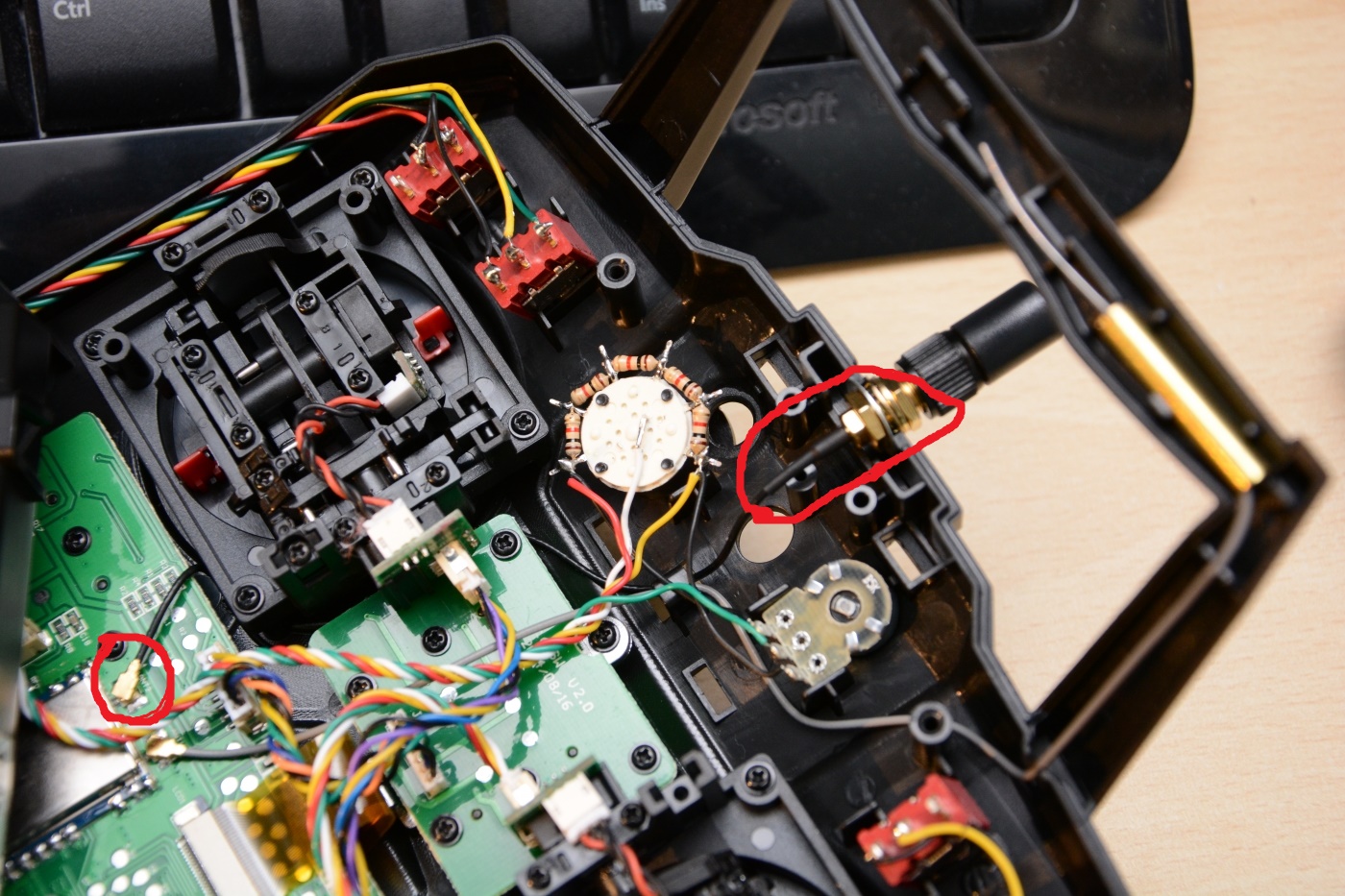
Pamiętać też trzeba o polaryzacji, zakładając, że jedną antenkę odbiornika mam poziomo, drugą pionowo, to jedna z nich (ta pionowa) będzie bezużyteczna, bo w oryginale obie nadają w polaryzacji poziomej. (W takiej sytuacji lepsze by było ustawienie w modelu obu anten poziomo 90 stopni względem siebie). Ruchoma jedna z anten pozwala mi ustawić ją tak, żebym mógł dostosować nie tylko kierunkowość, ale także polaryzację Po drugie gniazdo SMA pozwoli mi przymocować bardziej kierunkowe anteny i zakładając, że będę się obracał zawsze w kierunku modelu uzyskiwać lepsze zasięgi. Oczywiście pewnie nie będę wylatywał dalej niż zasięg standardowego zestawu, ale zawsze fajnie jest pokombinować Tym bardziej, że modyfikacja ta nie ingeruje w żaden sposób w obudowę nadajnika (w bardzo prosty sposób mogę bez śladu wrócić do oryginału). A antenkę z kabelkiem miałem w szufladzie, to niech se chociaż popracuje Dodam tylko, że modyfikacja antenki dla większości nie ma żadnego znaczenia i pewnie nikt nie będzie tego robił, ale temat jest ogólnie o modyfikacjach tej aparaturki, więc opisałem co zrobiłem. Ciekawsza jest na pewno ta druga modyfikacja
-
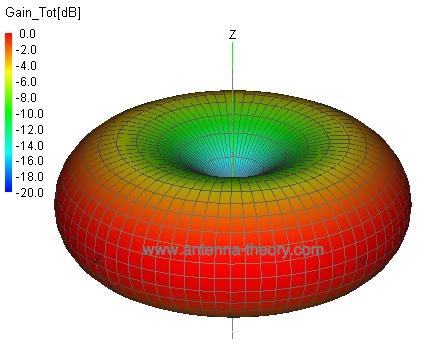
są pod kątem 90 stopni, ale jedna ta pionowa kryje obszar nad twoją głową i w podłogę (jest równoległa względem ziemi), ta w rączce jest także równoległa do ziemi, ale w poprzek aparatury. Obie anteny mają 60 stopni pokrycia w pionie(względem anteny). Daje nam to coś w rodzaju dwóch skrzyżowanych pierścieni. Zatem po przekątnej od aparatury sygnał będzie słabszy. Możliwość obracania jednej z anten pozwala na ustawienie innej charakterystyki promieniowania obu anten. Oczywiście odpowiednio do potrzeb. Tak wygląda mniej więcej kształt rozchodzenia się fali 1/4 falowej antenki w postaci drucika (typowej w tych aparaturach).
-
Wiem, druga jest w rączce, ale ta antena przerobiona daje mi dodatkowo możliwość ustawienia jej do moich potrzeb. Mając świadomość tej znajdującej się w rączce mogę drugą ustawić tak, by pokryć sygnałem jak największy obszar na którym zamierzam latać.
-
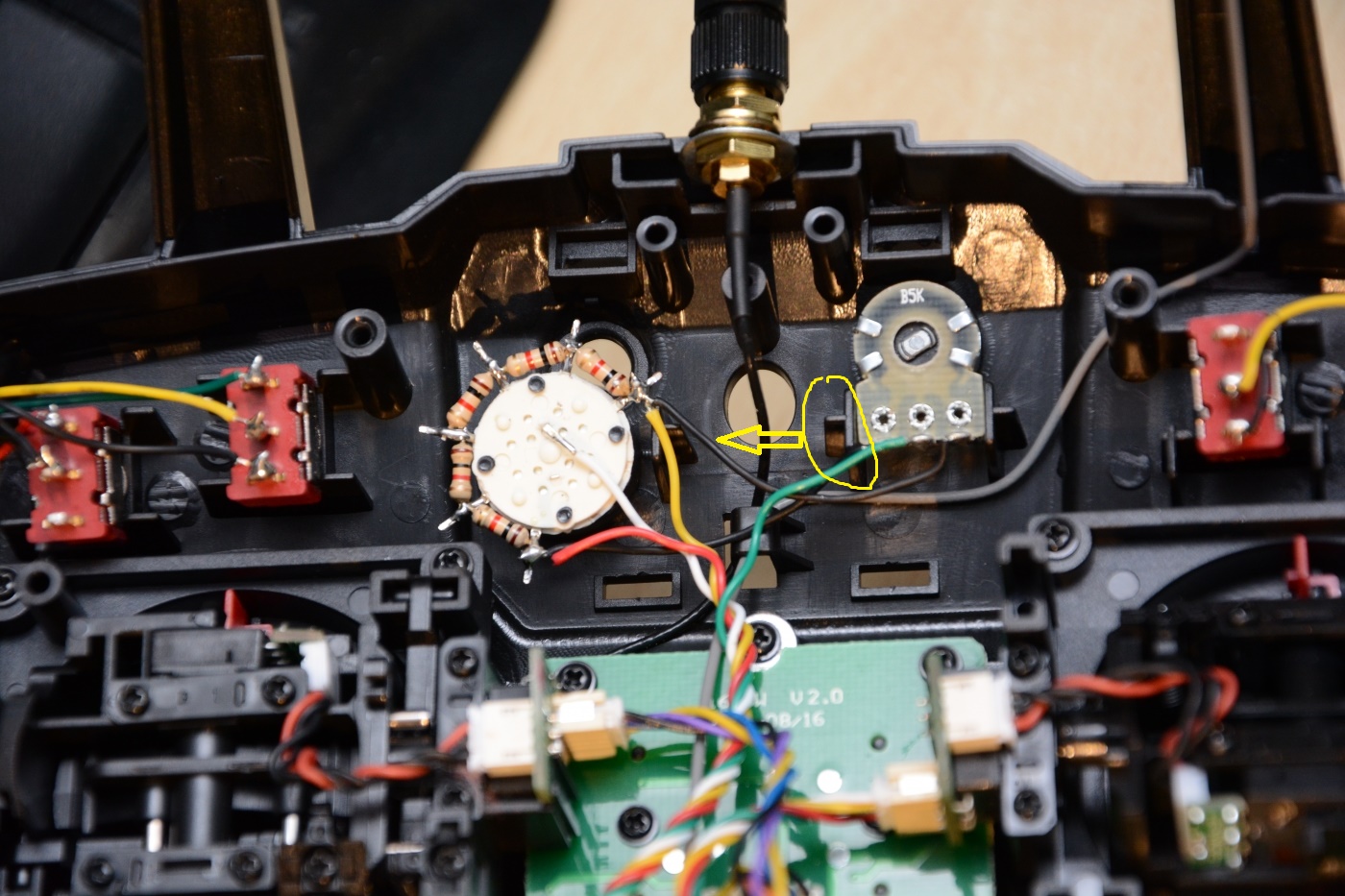
Wykonałem kolejną modyfikację. Zamiast 1 z potencjometrów zainstalowałem 6 pozycyjny przełącznik obrotowy. Teraz mogę wygodnie zmieniać tryby lotu . Samą przeróbkę wykonałem w taki sposób aby móc powrócić do oryginału (przynajmniej wizualnie ). Po rozkręceniu obudowy zdemontowałem potencjometry oraz znajdującą się pod nimi plastikową zaślepkę z logiem FlySky. Trzyma się ona na przykręconych potencjometrach oraz 4 zatrzaskach. Dość łatwo daje się zdemontować po podważeniu dolnych dwóch zatrzasków. Następnym krokiem jest wycięcie jednej z podpórek potencjometru. Jest to wymagane aby móc zmieścić przełącznik. Zdecydowałem się nawiercić nowy otwór nieco niżej, gdyż po rozwierceniu oryginalnego i tak nie dało by się tam wkręcić przełącznika (za wąsko). Po drugie w przypadku chęci powrotu do oryginału nową dziurkę przykrywa zaślepka i z zewnątrz aparatura wygląda jak oryginał Dalsze czynności warto zrobić na wyciągniętych z nadajnika elementach (nadajnik odkładamy na bok). Minimalizujemy w ten sposób szanse, że coś przypalimy lutownicą lub w inny sposób uszkodzimy. Kolejna rzecz to przylutowanie do przełącznika 5 rezystorów między nóżkami które przełączamy (u mnie środkową kolejno przełącza się między pozostałymi). Użyłem 5 rezystorów 1k om ponieważ oryginalny potencjometr ma 5k i charakterystykę liniową. W ten sposób zrobiłem potencjometr który skokowo przełącza wartości. Kolejna rzecz to odlutowanie przewodów od potencjometru i przylutowanie ich w tej samej kolejności do skrajnych dwóch i środkowej nóżki przełącznika. Drugi koniec przewodów od potencjometrów zakończony jest wtyczką wpiętą w płytkę nadajnika więc to też można zrobić poza nadajnikiem. Kolejność przewodów widać na zdjęciu wyżej. Najważniejsze by środkowy przewód trafił do środkowej nóżki. Pozostałe jak pomylimy, to najwyżej przełącznik będzie działał w odwrotnym kierunku. Po takiej modyfikacji wkręcamy przełącznik w nową dziurę i drugi potencjometr na swoje miejsce, wpinamy wtyczkę do płytki i skręcamy nadajnik. Nie montujemy zaślepki. Szukamy w szufladzie jakiejś gałeczki na nowy przełącznik i włala. Wygląda to tak: Może nie jest to już takie ładne jak było przed, ale na pewno nowa funkcjonalność poprawi właścicielowi humor. No i świadomość tego, że można w każdej chwili powrócić do oryginalnego wyglądu i funkcjonalności. Do APM trzeba jeszcze poustawiać trochę End Points w nadajniku by uzyskać prawidłowy rozkład trybów. Ja ustawiłem 80% z dołu i 75% z góry i jest bardzo dobrze. Każde ustawienie przełącznika ustawia odpowiednio 1 z 6 możliwych trybów. A wartości PWM wypadają praktycznie w środku każdego z przedziałów.
-
Przypominam, że kupując w Polsce przez internet masz 14 dni na zwrot towaru i nie musisz podawać przyczyny. Więc tutaj możesz zadziałać sobie w ten sposób, że kupisz, sprawdzisz i jak nie działa to robisz zwrot. Byle byś nie zostawił śladów użytkowania. (jakieś rysy, brudek itp...)
-
Przerobiłem nieco flajskaja, zamiast antenki oryginalnej zrobiłem antenkę łamaną na 2.4GHz. Dzięki temu będę mógł ją lepiej ustawić. Wykorzystałem do tego kiedyś kupioną antenkę wraz z gniazdem i kabelkiem. O taką: http://www.aliexpress.com/item/Free-Shipping-ESP8266-serial-WIFI-wireless-transceiver-module-MT7681-3DBI-gain-antenna/32221230205.html W samej aparaturze nie musiałem nic przerabiać, po prostu odpiąłem i wyjąłem antenkę a w jej miejsce wkręciłem gniazdo z kabelkiem który na drugim końcu ma taką samą wtyczkę. Podłączyłem, skręciłem złożyłem i przykręciłem antenkę Efekt: Wewnątrz wygląda to tak: W planach mam jeszcze jeden z potencjometrów wymienić na 6 pozycyjny przełącznik obrotowy. (Dzięki temu będzę miał przełączanie trybów na jednym przełączniku i drugi kanał wolny.) Coś w tym stylu: http://www.rchacker.com/projects/turnigy-9x/six-position-switch-modification-for-use-with-ardupilot Z tym, że znalazłem ładniejszy i mniejszy przełącznik obrotowy: http://allegro.pl/show_item.php?item=5660734803 Średnica obudowy 16mm więc dość niewielki.
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Tak z ciekawości zajrzałem sobie do nadajnika FlySky FS-i6. Anteny nadajnik ma dwie: jedną pionową w tym wystającym cycku u góry, a drugą poziomą w rączce Pomazane na żółto
-
Z trzech wyjmujesz plusy, jeden zostawiasz. Minusów nie wyjmujesz. (Plusy = te środkowe)
-
Na uwadze mieć należy to, że kupując gotowca zwykle wszystko w nim jest zintegrowane niektórych gratów nie przełożysz do innych modeli. Składając samodzielnie masz radio które możesz przekładać między modelami, niektóre części tak samo. To dobra sprawa jak nie chcesz się ograniczać do jednego modelu. Druga sprawa to dostępność części i w składaku można je sobie zmieniać na inne gdy nam coś nie pasuje. No i wygląda to tak, że baterie z jednego można wykorzystywać w innym, radia, gimbale itd... Do montażu potrzebna jest umiejętność lutowania, trochę wiedzy o prądzie i kilka podstawowych narzędzi. Nieodzowne też jest posiadanie paczki trytytek
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Chwilowo jedyny problem to mróz na dworze teraz Z nowości to zamontowałem wyczekiwany GPS holder. Kopter się przezentuje teraz tak:
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Konkretnie nie, jedynie chwilę na podwórku testowo, ale z problemami. Teraz za zimno -
TGY-i6 to to samo co FlySky FS-i6 tylko inne naklejki ma. Ta aparatura ma telemetrię. Że standardowym odbiornikiem jest 6 kanałów PWM i pomiar napięcia na odbiorniku. Jak kupisz wersje z odbiornikiem FS-iA6B to masz dodatkowo wyjście PPM i możliwość dopinania dodatkowych czujników które kupisz oddzielnie. W podstawowym zestawie jest odbiornik FS-iA6 Wytaptapane
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Sytuajca taka że dzis przyszły zapasowe śmigła i w końcu dotarł stojak pod GPS. Teraz się bawie z ESP8266 jest to moduł zawierający w sobie SoC i sprzętowe WiFi. Robię transparentnego serial to TCP Już pierwsze połączenia mam za sobą. Niestety po chwili zrywa się połączenie z Mission planerem. Muszę napisać soft używając bezpośrednio toolchaina. Bieżący zrobiony na Arduino jest za wolny. Znalazłem już kawałek kodu do przerobienia pod swoje potrzeby więc nie bede musiał pisac od zera. No i oczekuje na przesyleczke z Chin z modułami Si4432 do LRS'a A dziwne zachowanie samego APMa wynikało z kalibracji compass - Motors. Po wyzerowaniu zaczął działać normalnie. Teraz jak już mam porządnie zamocowanego GPS a to można będzie to poustawiać. Wytaptapane -
Mój z pakietem 3.6 i kamerą waży 1250g Wytaptapane
-
Nie bierz tego BGrade. To jest jakieś niewiadomoco i raczej zakładanej pojemności mieć nie będzie. Możesz wziąć do niego Multistar 3S 5200mAh 10C. 10C spokojnie wystarczy, a bateria od razu 2 półki wyżej przy nieznacznej różnicy cen. http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idproduct=65267 W ładowarkę też zainwestuj porządniejszą. Ja kupiłem w polsce Redox Alpha V2 z zasilaczem za 120zł. Możesz też taniej zamówić z Chin np iMax B6 i do niej zasilacz, lub wersję z wbudowanym zasilaczem. Pamiętaj. Ładowarkę kupisz raz i naładujesz nią wszystko(nawet aku w samochodzie). Jak kupisz tą tanią naładujesz nią tylko LiPo i to maksymalnie do 3S.
-
To jest właśnie ten z Chin co chcesz zamówić http://pfmrc.eu/index.php?/topic/58482-zestaw-z-chin-quadcopter-f450-z-apm26-relacja/ Dokładnie od tego sprzedawcy. Mogę śmiało polecić sprzedawcę, wysyłka niemalże natychmiastowa po potwierdzeniu płatności na Ali. Sprzedawca nawet czyta komentarze, bo trochę ludzi wcześniej narzekało na za krótkie śrubki do silników. Ja już otrzymałem odpowiedniej długości. Ja zakupiłem radio Flysky FS-i6 z Ali. Zobacz na Banggood.com są te radia w podobnej lub nawet lepszej cenie z magazynu w EU. Do tego(http://www.aliexpress.com/item/F450-Quadcopter-Rack-Kit-Frame-APM2-6-and-6M-GPS-2212-1000KV-HP-30A-1045-prop/32402430079.html) zestawu od razu radzę dokupić: -stojaczek pod GPS: http://www.aliexpress.com/store/product/DJI-GPS-Folding-Base-Antenna-GPS-Set-Fitting-Seat-Foldable-Bracket-Holder/211266_32231916291.html -wyważarkę do śmigieł: http://www.aliexpress.com/store/product/LHM077-Carbon-Fiber-Magnetic-Propeller-Balancer-Prop-Essential-For-Quadcopter-FPV-Helicopter-Airplane-Free-shipping/211266_1939226542.html -trochę kabelków do łączenia radia: http://www.aliexpress.com/store/product/LHM085-5-pcs-10cm-Servo-Extension-Lead-Wire-Cable-MALE-TO-MALE-KK-MK-MWC-flight/211266_1949407262.html -nogi do lądowania: http://www.aliexpress.com/store/product/LHM022-4-x-universal-Tall-Landing-gear-skids-DJI-F450-F550-SK480-FPV-aerial-photo/211266_1993343533.html wszystko od jednego sprzedawcy. (nogi i inne można na Ali znaleźć taniej, ale trzeba będzie czekać na różne paczki...)
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
A na przykład z tąd: http://copter.ardupilot.com/wiki/altholdmode/ a dokładniej: AC3.1 and later allow arming and disarming in altitude hold mode. When disarming, the copter may need to rest in the landing position for a few seconds to allow the “landing checker” to verify that the copter has landed before you are able to disarm. Ogólnie od wersji 3.1 można uzbrajać i w AltHold i w Loiter. Loiter'a jeszcze nie próbowałem uruchamiać. Do trybu Stabilize GPS i kompas jest nie potrzebny. Można go nawet odłączyć. Bez GPS'a powinnien móc latać pod warunkiem, że wyłączymy sprawdzanie w ustawieniach. AltHold korzysta już z GPS do określania wysokości (razem z barometrem). Jeszcze moduły mam WiFi ESP-07. Fajne rzeczy potrafi i można telemetrię posłać po WiFi. Jedyny problem jest w tym, że pracuje też na 2.4GHz. Jak zorbie sobie LRS'a na 433MHz to wrzucę WiFi jako telemetrię. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Tylko uważaj żeby się uszkodzić gwintu w tulejce Wytaptapane