adams38
-
Postów
18 -
Rejestracja
-
Ostatnia wizyta





-
Jak uzyskać obraz WiFI na tablecie
adams38 odpowiedział(a) na adams38 temat w ABC - porady i pytania
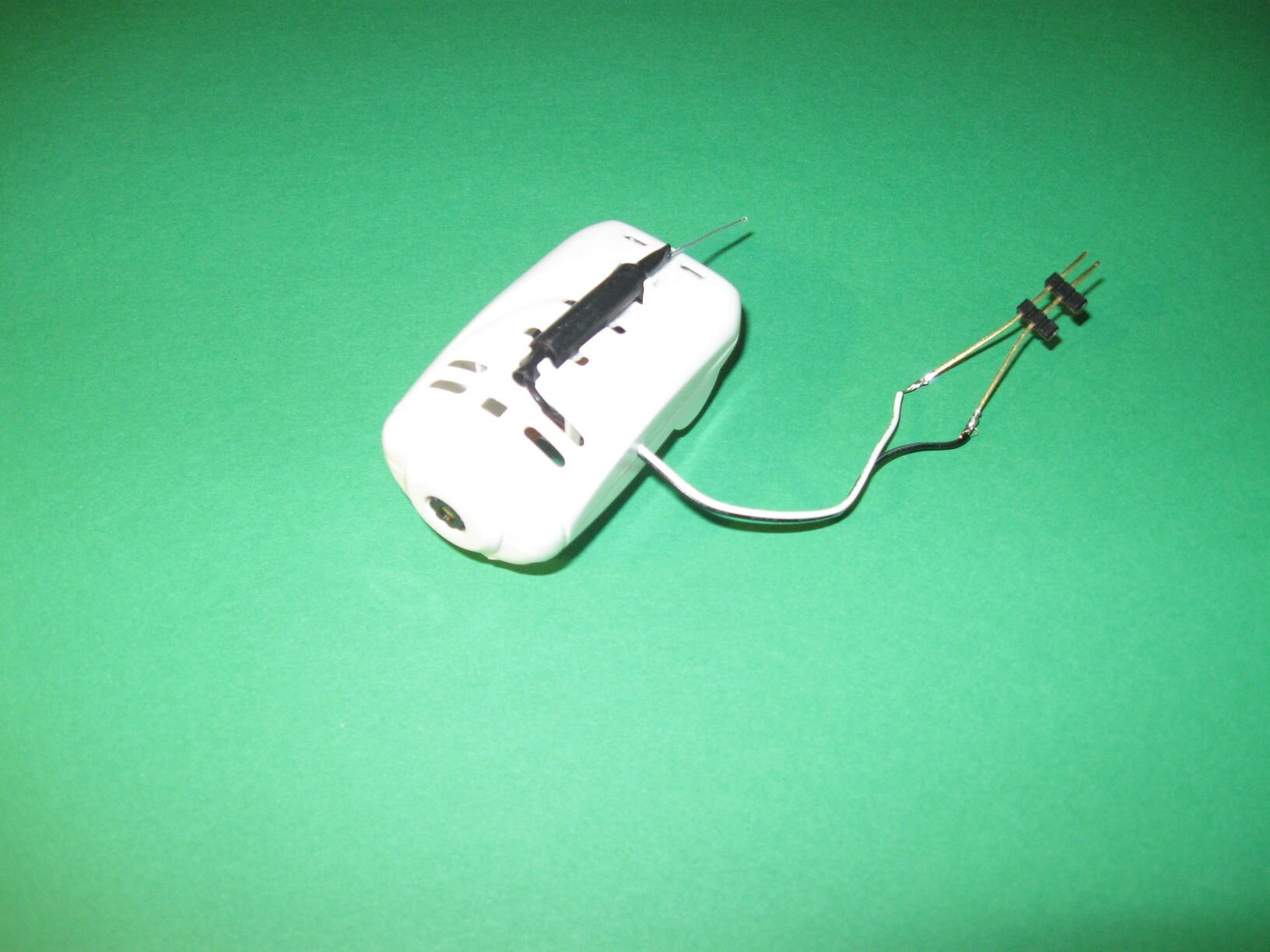
Opis Kolego Marka nie pasuje do rzeczywistości: 1. Kamerka jest "podwieszana" - na wskazanej stronie widać kamerki wbudowane w kadłub drona. 2. Kamerka nie posiada karty pamięci. 3. Z kamerki wychodzą wyłącznie 2 kabelki: czarny - i biały plus - nie ma przewodu sterującego. 4. Wyjście sygnału jest wyłącznie drogą radiową W nadajniku RS 832 rzeczywiście te punkty istnieją, zasugerowałem się faktem istnienia wtyczki zaopatrzonej w kabelki i opisane w dołączonej ulotce. Wypróbuję je w najbliższym czasie. -
Proszę o radę w dwóch sprawach: Sprawa 1. Dostałem kamerkę z rozbitego, starego, dość prymitywnego drona (podobno kosztował 300zł) Już wiem, że jest zasilana 3.3 V, Nadaje po WiFi, widać jej zgłoszenie na tablecie jako: "WiFi FPV-VR-7d1-455." Jedak nie mam żadnego doświadczenia z transmisjami WiFi i nie wiem co dalej należy robić, żeby ten sygnał pojawił się na tablecie. Dane kamery - tylko to co widać na zdjęciach. Dane tabletu: ALOW White TAB, nazwa modelu aw132, system Android 4.2.2, wersja jądra 3.0.46+ Domyślam się, że na tablecie powinien być zainstalowany odpowiedni program ale nie wiem jak się nazywa i gdzie go można zdobyć. Jestem również zainteresowany drugą możliwością odbioru tego sygnału na komputerze stacjonarnym. Sprawa 2. Nabyłem zestaw FPV Składający się z nadajnika TS8332 i odbiornika RC832. Uruchomił się łatwo, działa dobrze ale pomimo opisu w ofercie nadajnik nie posiada wejścia AUDIO. Moje pytanie: Czy rzeczywiście to wejście nie istnieje, czy może potrzebna jest jakaś tajemna wiedza, żeby ten sygnał dołączyć ?

-
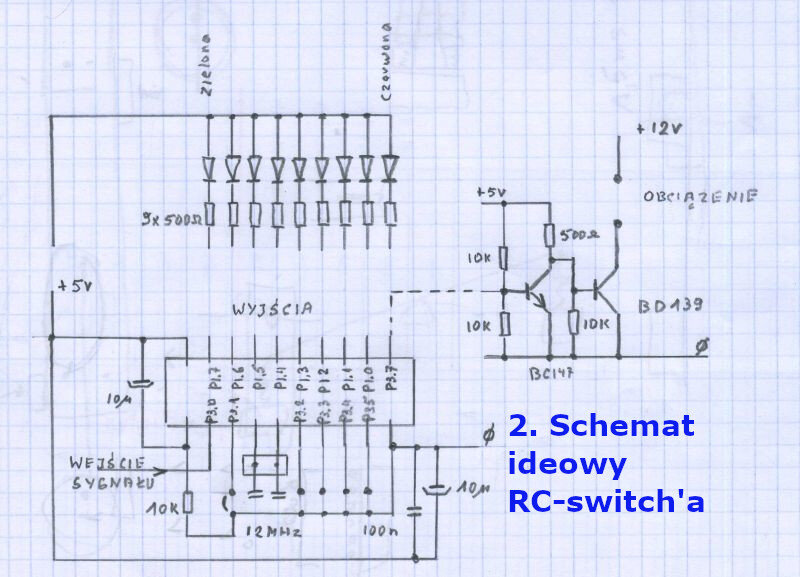
Schemat jest załączony na rys. 2. Obecnie załączam plik programu źródłowy i INTEL.HEX. INTEL.HEX RC_UNI_0.A51
-
Mogę przesłać projekt płytki drukowanej (Autotrax) i kody źródłowy INTEL'a i hex. nie wiem tylko jak to zrobić ? Jako załączniki ?
-
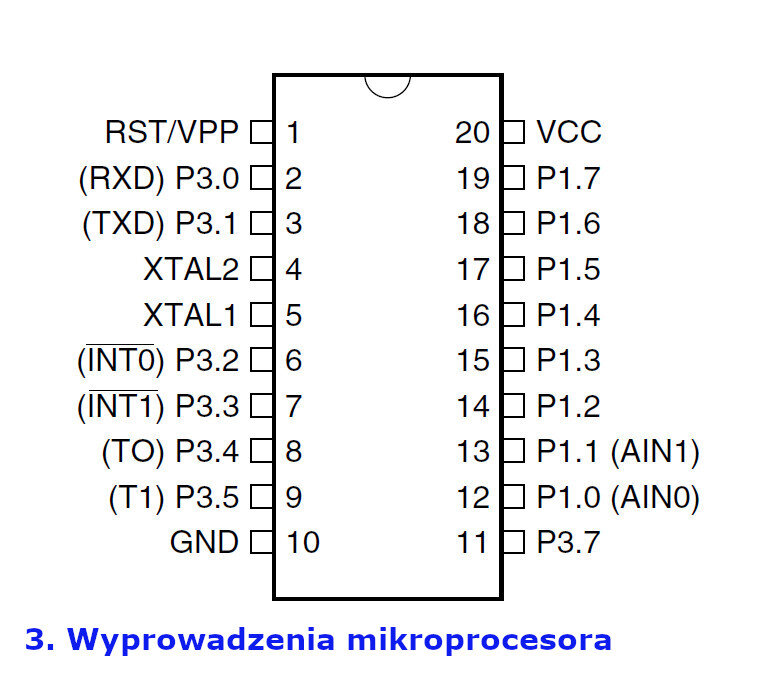
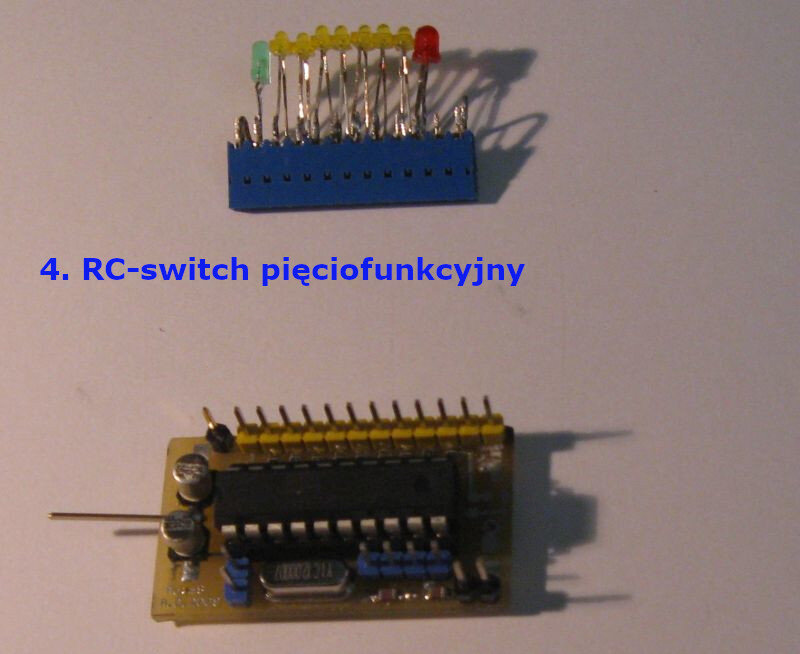
NIETYPOWE RC_SWITCH'e Wszyscy dokładnie wiemy jak działa typowy RC-Switch zamieniający rosnącą długość impulsu kanałowego na sygnał zero-jedynkowy. Czasami jednak to nie wystarcza i pojawia się chęć rozbudowania wspomnianego RC-Switch'a - może ściślej stworzenie nowego rozwiązania, potrzebnego aktualnie do spełniania wymaganej funkcji. Przeglądając forum stwierdziłem, że taka potrzeba nie jest tylko moim pomysłem, jednak większość omawianych rozwiązań dotyczy modeli latających więc przeważnie muszą spełniać inne warunki niż moje założenia, które mają pasować do modeli pływających. Dodatkowo jako człowiek wzrastający jeszcze w czasach mikrokontrolerów 4 bitowych (tak, tak, to nie pomyłka), trzymam się starej rodziny Intela 8051 i prawie zawsze na niej opieram swoje rozwiązania. Pozwalam sobie przedstawić swoje rozwiązania - na razie w fazie prototypów - może dla kogoś okażą się pomocne. Żeby wyjaśnić dokładnie jakie potrzeby mogą pojawiać się w konkretnych rozwiązaniach, przyjrzyjmy się na początek działaniu typowego RC-Switch'a. Jak wiadomo znormalizowany impuls kanałowy zmienia swoją długość od 1 ms do 2 ms a długość impulsu = 1.5 ms uważana jest za teoretyczne NEUTRUM (dla serwomechanizmu, dwu dwubiegunowego regulatora napięcia itp.) - aczkolwiek praktycznie powinniśmy zdawać sobie sprawę, że to jest pewien obszar rozciągający się od nieco mniej niż 1.5 ms do nieco więcej niż 1.5 ms. Być może określone to jest w jakichś normach ale ja się nigdy z nimi nie spotkałem. Jednak te zakresy tolerancji muszą występować, ponieważ inaczej niemożliwe było by praktycznie wyłączenie np. napięcia na silniku albo spokojne utrzymanie jakiegokolwiek steru w pozycji NEUTRUM. Chcąc przedstawić swoje rozwiązania posłużę się wykresem na którym podział aktywnej zmiany długości impulsu będzie podzielony na 9 części - dlaczego akurat na 9 będzie opisane później. W najczęściej występujących urządzeniach fabrycznych granica zmieniająca stan wyjścia z wartości (umownej, bo napięciowo to może być różnie) jest wartość szerokości impulsu = 1.75 ms a więc przykładowo obszar 5 między 2.66 a 2.88 ms. w zastosowanym podziale. Po co inne RC-Switch'e Rozbudowane (nietypowe) Rc-Switch'e mogą zwielokrotnić funkcję typowego rozwiązania, które praktycznie zamienia wyłącznie szerokość impulsu kanałowego w sygnał zero jedynkowy. Chęć budowania tego rodzaju urządzeń wynika z małej ilości kanałów w porównaniu z potrzebami użytkownika i to jest chyba podstawowa potrzeba poszukiwań innych rozwiązań. 1.Najprostszym tego przykładem jest rozwiązanie z dwoma wyjściami sygnalizującymi wzrost szerokości impulsu do MAX ale również i jego spadek do MIN. To praktycznie rozwinięcie jednego kanału na dwa. (wariant nr. 1) Jednak wygenerowany sygnał istnieje tylko w przypadku przytrzymania drążka w jednej ze skrajnych pozycji. Czasami to wystarcza a może nawet jest pożądane, czasami lepiej żeby ten stan sam się utrzymywał aż do jego skasowania. 2.Można go więc również wykonać w innym rozwiązaniu np. z pamięcią. W tym przypadku po przesunięci drążka w skrajną pozycję (pamiętajmy jednak o stosownej wspomnianej uprzednio tolerancji) sygnał pozostaje aktywny mimo powrotu drążka sterującego do pozycji NEUTRUM. Skasowanie tego stanu może się odbyć na dwa sposoby: a. przestawienie drążka w drugą skrajną pozycję - sygnał np. MAX. zostaje wyłączony ale załącza się sygnał MIN. I odwrotnie (to mój wariant 2). Można by go określić jak wariant ALBO - ALBO. b. Cofnięcie drążka do pozycji (szeroko pojętego) NEUTRUM i ponowne skierowanie go do tej samej skrajnej pozycji. W ten sposób uzyskujemy możliwość wygenerowania dwóch niezależnych sygnałów, które dodatkowo są pamiętane aż do ich świadomego wyłączenia. (to mój wariant 3.) 3. Sterując kanał potencjometrem możemy (w opisanym przypadku wygenerować więcej sygnałów (w moim rozwiązaniu 8, bo sygnał nr. 1. jest z założenia aktywny cały czas). (to mój wariant 4.) 4. Odmianą tego działania może być rozwiązanie, w którym załączenie następnego wyjścia nie kasuje już aktywnego. Dopiero cofane potencjometru ( zmniejszanie szerokości impulsu prowadzi do ich kolejnego wyłącznie - oczywiście w odwrotnej kolejności. W tym przypadku rozwiązanie przewiduje, że w skrajnym położeniu wszystkie 9 wyjść jest nie aktywne. Ale w zależności od potrzeb można to zaprojektować inaczej. (wariant 5.) Oczywiście mając mikroprocesor do dyspozycji, nasze możliwości są praktycznie nieograniczone - możemy sobie napisać program realizujący funkcję jaka tylko jest nam potrzebna. Rozwiązanie wykonane jest w oparciu o mikroprocesor INTEL'a AT89C4051 (ale użycie AT89C2051 lub AT89C14051 jest również możliwe, bo program wymaga jedynie 709 bajtów pamięci. Rozważając budowę układu scalonego wspomnianego mikroprocesora Wydaję się oczywisty podział przedziału czasowego na 9 części, ponieważ wyjścia sygnałów sterujących wykorzystują 8 wyjść portu P1 i siódme wyjście portu P3 a to z kolei wynika z fizycznej budowy obwodu scalonego mikroprocesora. Pozostałe bity portu P3 wykorzystane są do wstępnej konfiguracji RC-Switch'a, determinującej jego działanie. Bit P3.0 wykorzystany jest jako wejście impulsu sterującego z odbiornika. Za wyjątkiem dwóch ostatnich wariantów przyjęto, że stanowi MIN odpowiadają pozycje czasowe 1 2 a stanowi MAX pozycje czasowe 8 i 9. Pozostałe pozycje traktowane są jako NEUTRUM. Na schemacie uwidoczniono również układ kontroli działania RC-Swich'a, (pomocny przy jego uruchamianiu),składający się z 9 diod świecących i 9 500 om oporników. Dla mikroprocesora ATMELA jest to bezpieczne ponieważ każde w wyjść można obciążyć prądem 20 mA. Dodatkowo podano układ wzmacniający, który może być dołączony do każdego wyjścia. W moim przypadku większy prąd niż 1.5 A nie jest mi potrzebny. Będę używał napięcia 12 V ale nawet 40 V dla tego tranzystora jest dopuszczalne. Omawiany RC-Switch wykonany został na płytce drukowanej ale nie docelowej, tylko przypadkowo pasującej do tego układu. Na płytce docelowej są zaprojektowane zworki (jumperki) do łatwego wyboru wariantu działania i wzmacniacze - jak na rysunku - na skrajnych pozycjach. Mikroprocesor jest w podstawce co umożliwia dalsze prace nad ew. udoskonaleniem programu. "Lotnicy" prawdopodobnie marzyli by o mikroprocesorze SMD, w celu obniżenia wagi układu. Dla mnie jest to bez znaczenia, Ponieważ buduje modele pływające i to o znacznej wadze. Wykaz rysunków: 1. Wykres czasowy impulsu sterującego.jpg 2. Schemat ideowy RC-Switcha.jpg 3. Wyprowadzenia mikroprocesora.jpg 4. RC-switch 5 funkcyjny.jpg 5. Przygotowanie do próby RC-switcha.jpg
-
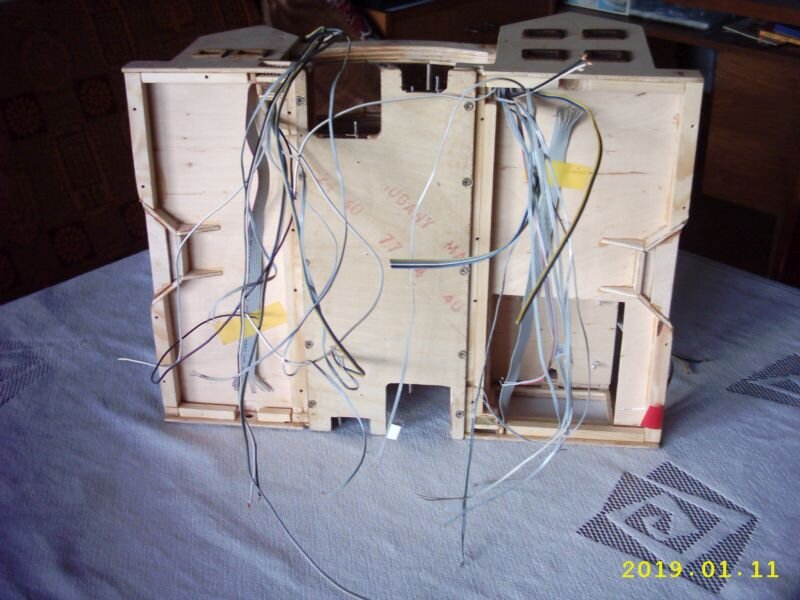
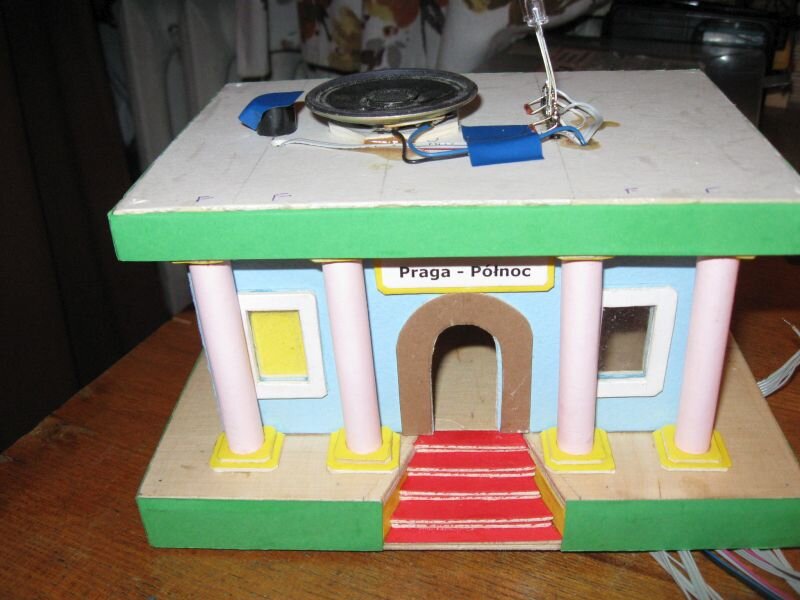
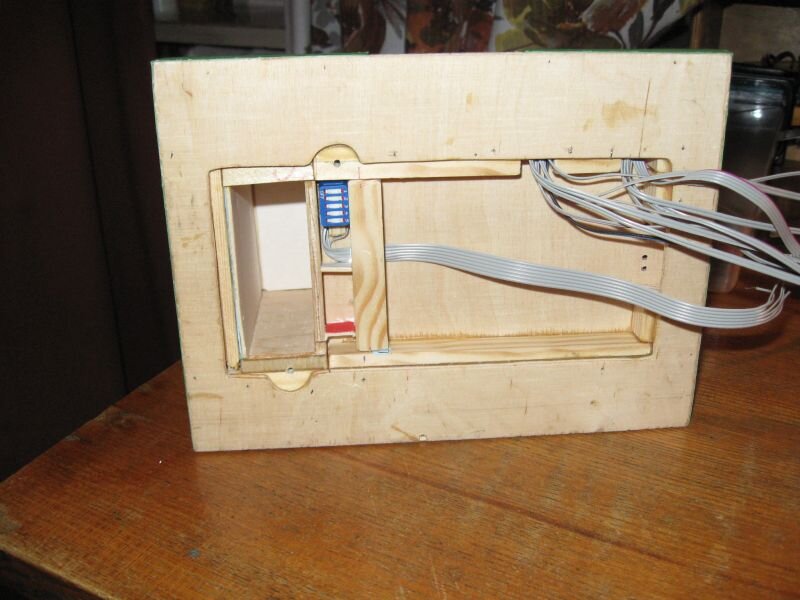
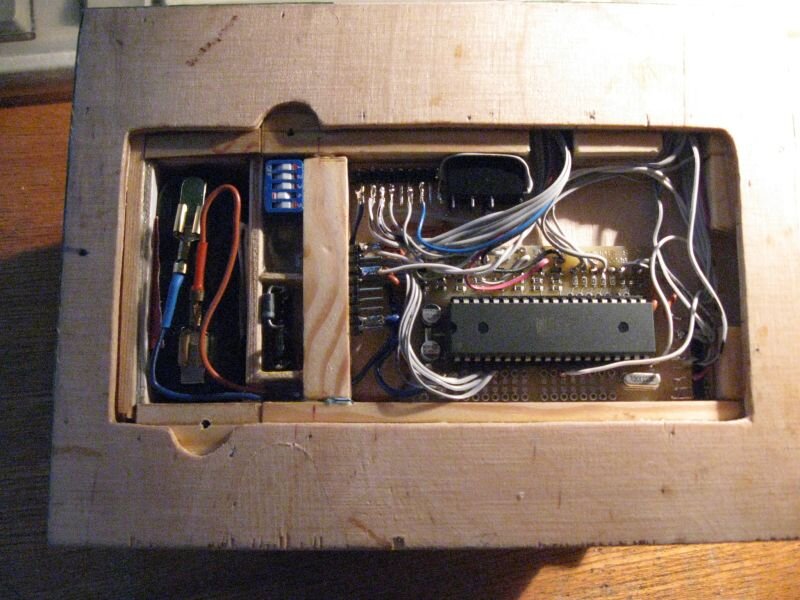
DWORZEC KOLEJOWY (duży) To bardzo wdzięczny temat dla młodych konstruktorów. Tym bardziej, że wielu młodych ludzi interesuje się kolejnictwem i wielu ma modele kolejek wśród swoich zabawek. A zastosowanie mikroprocesorów w modelach kolejowych daje nam niezwykłe możliwości podniesienia ich atrakcyjności. Przedstawione fotografie pokazują nam przykład takiego rozwiązania. Dworzec jest przystosowany do połączenia z torami kolejki wielkości HO i posiada 4 odcinki takich torów – dwa na stałe – dwa dołączane - wraz z semaforami To dość kłopotliwe, bo trzeba również dołączać kabelki do zasilania semaforów, znajdujących się na tych odcinkach torowych i doprowadzać kontrolowane zasilanie w celu automatycznego odprawiania pociągów. W celu łatwiejszego przechowywania zabawki w bardzo łatwy sposób daje się również odłączać wieża. Zegar wieżowy jest podświetlany ale niestety nie działa. Na jednej ze ścianek budynku dworcowego znajdują się przyciski do sterowania jego pracą i regulatory prędkości (i kierunku) jazdy pociągów niezależnie na obu torach. Druga część dworca – to budynek umownie nazywany budynkiem hotelowym. Teraz takich rozwiązań się już nie spotyka ale dawniej... szczególnie w Ameryce na dzikim zachodzie... Perony też są oświetlone. Na dole większego budynku widać gniazdko dołączeniowe zasilania całego systemu (17 V napięcia zmiennego). Po dołączeniu dowolnej ilości dodatkowych torów nie trzeba korzystać z dodatkowego zasilania. Komentarze do fotografii: 1,2 - Dworzec był prezentem dla wnuczka i jego komplet przedstawiony jest właśnie na tych fotografiach. Nie mogło zabraknąć również instrukcji obsługi - dość obszernej, bo działanie dworca jest dość skomplikowane. Po odpowiednich ustawieniach zapewnia on pewną automatykę działania. Pociągi mogą same się zatrzymywać i same odjeżdżać - oczywiście zgodnie ze wskazaniami semaforów. 3,4,5 - Widok dworca z różnych stron 6 - Widok wnętrza, a na mim oświetlenie peronów. Widać również że dość duże wiązki przewodów nie zmieściły by się pod torami i dlatego poprowadzone są w belkach konstrukcji zadaszenia peronów. 7 - Widać na niej tablice do sterowania a na boku budynku hotelowego gniazdo do podłączenia zasalania. 8,9 - To fotografia dworca z okresu wczesnej budowy. Tylko daty na zdjęciach są nieprawdziwe (był budowany około 12 lat wcześniej) a jeden z pierwszych aparatów cyfrowych zamieszał na zdjęciach nieprawdziwe daty. Cała elektronika sterująca pracą dworca (a jest tego sporo) znajduje się: - w podstawach budynków, - w pomieszczeniach „technicznych” dworca – to te pomieszczenia zaopatrzone w mleczne szyby, widoczne na fotografiach 1 i 3. - pod dachami budynków. DWORZEC KOLEJOWY (taki mniejszy) Jak widać dworzec kolejowy wcale nie musi być taki wielki i „mądry” jak pokazano na poprzednim przykładzie. Może być wykonany z tekturki (w tym omawianym tylko podstawa jest ze sklejki). Jest mały i zasilany jedną płaską baterią. Ale mądry to jest, bo ma sterowanie mikroprocesorem, potrafi zmieniać światła semaforów, zapalać i gasić oświetlenie pomieszczeń i grać jedna melodyjkę w czasie postoju pociągu na stacji. I jeszcze gwizdać jak to robią kolejarze. Komentarze do fotografii: 1,2,3,4 - Widok dworca z różnych stron Na fotografii 4-tej widać przyciski do włączania i wyłączania dworca. 5 - To poddasze tuż przed przyklejeniem dachu. Widać tu diody świecące do oświetlenia pomieszczeń dworca i końcówki filarów. To oczywiście rury sklejone z wielu warstw papieru. Przez ich wnętrza przeprowadzone są przewody z podstawy dworca. 6 - To „strych” dworca, Jest tam głośniczek do odtwarzania melodii i oświetlenie tego pomieszczenia. 7 - Jeszcze pusta podstawa. Po lewej stronie widać miejsce na baterię 3R12. 8 - Tu już widać nieco więcej a szczególnie mikroprocesor sterujący pracą dworca. Oczywiście AT89C51.
-
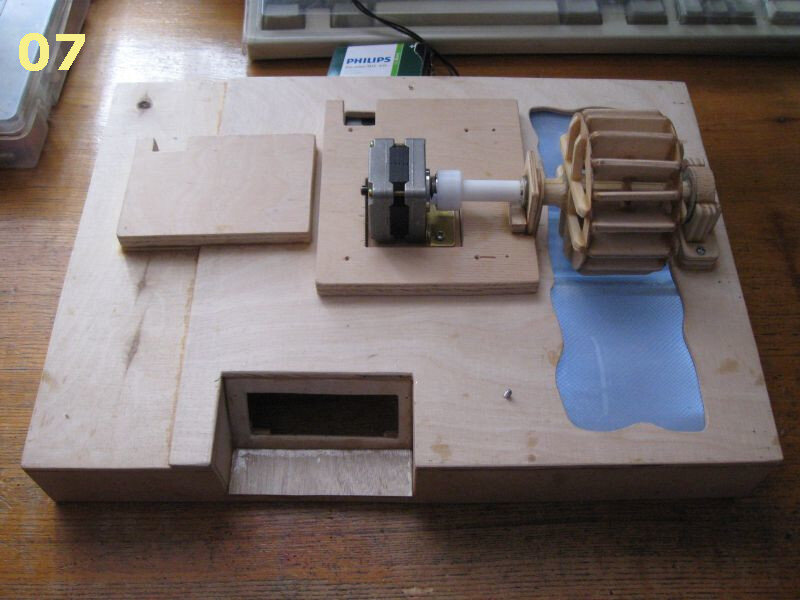
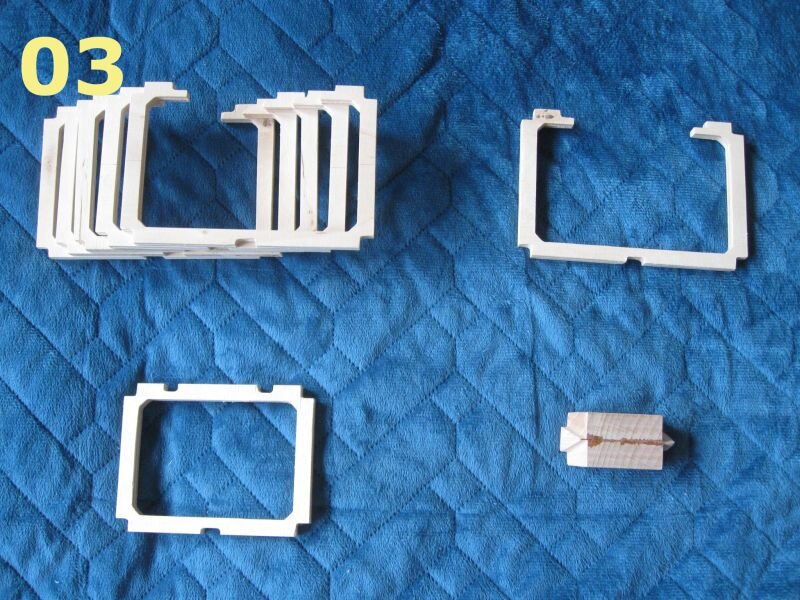
MŁYN WODNY To model bardzo podobny w swoim działaniu do wiatraka opisanego poprzednio. Bo służył również do podobnego celu. Zasadnicza różnica, która różni te urządzenia (i wygląd naszych modeli), to rodzaj energii służącej do ich uruchomienia. W przypadku wiatraka jest – jak sama nazwa wskazuje - to wiatr, w przypadku młyna wodnego - jak sama nazwa wskazuje płynąca woda. Załączone fotografie pokazują wspomniany model młyna wodnego. Jak widać w pomieszczeniach zapalone są wszystkie światła, co sugeruje również ekran modelu, na którym widać napisy: „Stan świateł” i poniżej „Wszystkie +”. Model składa się z dwóch budynków – jak przeważnie bywało w rzeczywistości, stojących na rzeczką, w której znajduje się koło wodne napędzające mechanizmy młyna. Następne fotografie pozwalają obejrzeć model młyna z innych stron i obejrzeć szczegóły jego budowy. Model młyna umożliwia obejrzenie symulacji dnia pracy młyna w trzech wariantach: W dniu roboczym, w dnie świątecznym i w dniu Wigilii. Na każdym etapie możliwa jest (za pomocą 4 przycisków) modyfikacja widoku młyna: Zmiana świateł, ruchu wody, ruchu koła wodnego i odtwarzanie melodii. Jak widać na jednej z fotografii urządzenia elektroniczne modelu są dość bogate. To wrażenie spotęgowane jest zapewne faktem, że do budowy modelu nie była projektowana specjalnie do niego przeznaczona płytka z elementami elektronicznymi lecz wykorzystano inne mniejsze płytki z poprzednich rozwiązań. To powoduje, że widać znajdujące się tam bogate okablowanie. Warto zwrócić uwagę na sposób rozwiązanie „płynącej wody” w postaci podświetlonej przesuwającej się ażurowej taśmy, napędzanej silnikiem krokowym. Takim samym silnikiem napędzane jest koło wodne. Stosowanie silników krokowych pozwala na bardzo łatwą regulacje ich szybkości obrotowych, co zostało tu zresztą wykorzystane. Zarówno woda może „płynąć” wolno i szybko jak i koło wodne może się kręcić wolno lub szybko. Komentarz do zamieszczonych fotografii: 1,2,3,4,5 - Widok ogólny młyna z różnych stron. Młyn ma pokrycie (imitujące kamienie, z których został zbudowany) z bambusowych kostek dostępnych w wielu sklepach jako podstawki pod szklanki. 6 - Tylne ścianki są mocowane magnesami ale łatwo wyjmowane w celu umożliwienia włożenia tam dodatkowych zabawek. Do ułatwienia wyjmowania służą otwory w dolnych częściach ścianek 7 - Podstawa w stanie surowym - widoczne rozwiązanie napędu koła. 8,9 - Elementy młyna - dachówki wycinane są z grubego kartonu. 10,11 - Stanowisko, na którym mikrokontrolery młyna otrzymują oprogramowanie 12 - Elektronika młyna - widać również napęd "płynącej wody;.
-
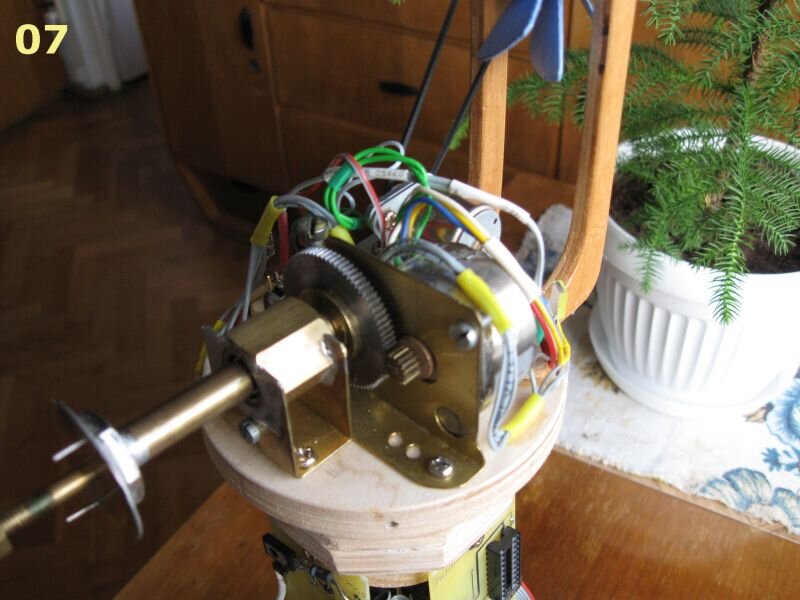
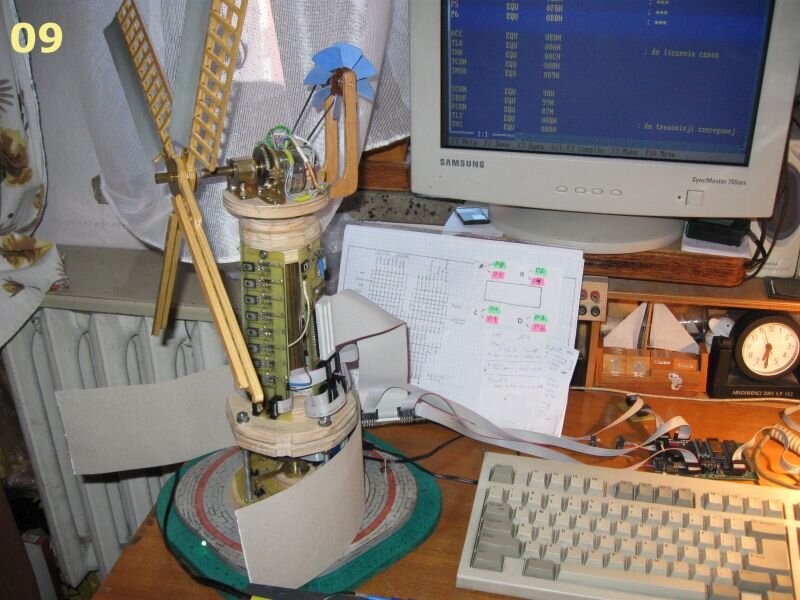
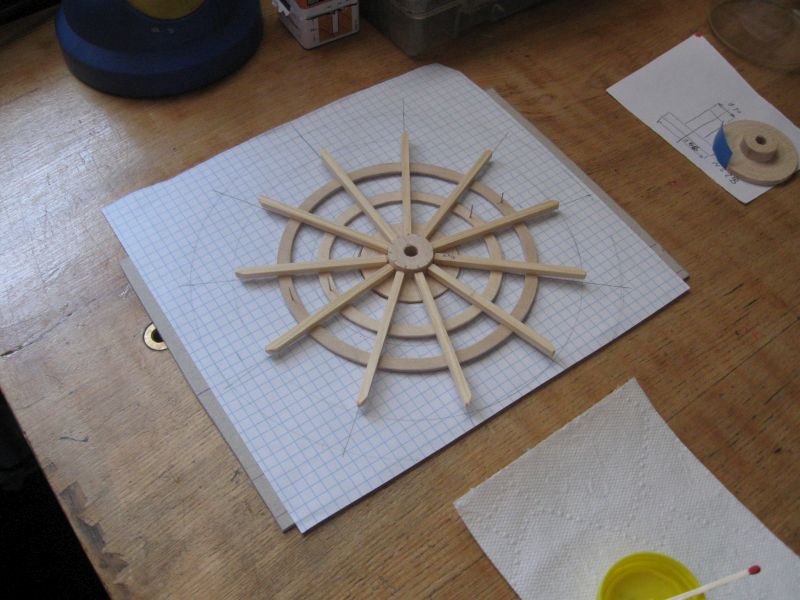
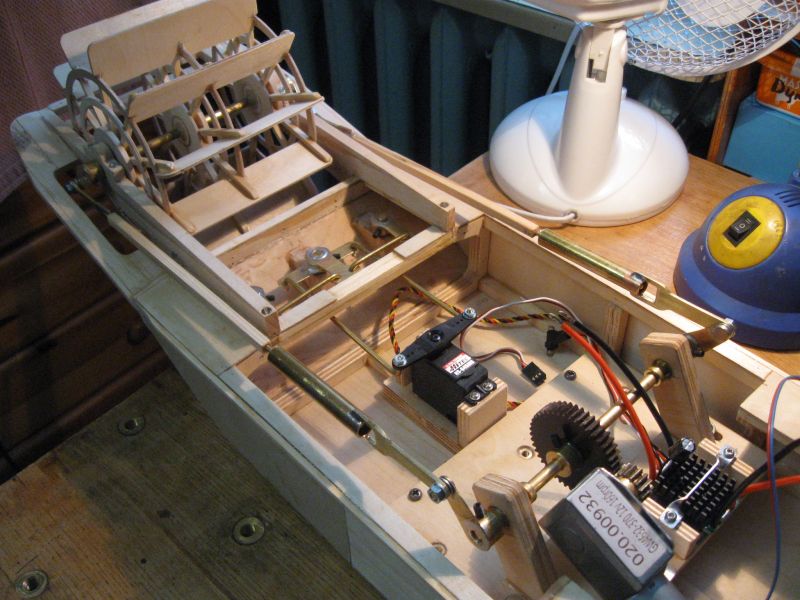
WIATRAK Wiatrak wzorowany jest na wiatraku holenderskim, przedstawionym na rys. 1. Prawda, że piękny ? Wiatraki holenderskie miały w sobie pewne ziarenko automatyki, ponieważ potrafiły samodzielnie ustawiać swoją głowicę, przystosowując się do kierunku wiatru. Obrót głowicy realizowany był na skutek obrotu wiatraczka (to ten niebieski), który spełniał rolę indykatora kierunku wiatru i powodował potrzebne ustawienie poprzez stosunkowo dużą przekładnię. Wiatrak naśladuje następujące ruchy prawdziwego wiatraka: 1. Ruch łopat wiatraka – oczywiście jak w rzeczywistości - w jedną stronę ale (dla uproszczenia) tylko z dwoma prędkościami. 2. Obrót głowicy wiatraka. Rzeczywisty wiatrak może obracać głowicę – w zależności od zmian wiatru - bez ograniczeń. Wykonanie takiego modelu byłoby jednak zbyt skomplikowane ze względu na rozwiązania mechaniczne. Dlatego przyjęto ograniczenie obrotu głowicy wiatraka – w zakresie -90 stopni, +90 stopni z możliwością zatrzymania tego obrotu w pięciu pozycjach, ustalonych przez program. 3. Ruch turbinki, która w prawdziwym wiatraku steruje ustawieniem głowicy a w modeli jest symulowany. W wiatraku zapalają się również światła na poszczególnych piętrach i są wykonywane melodie. Za pomocą „dipswitcha” można zaprogramować dodatkowo wystąpienie sytuacji wyjątkowych i wprowadzenie pewnych ograniczeń. Następne fotografie pokazują gotową zabawkę i poszczególne rozwiązania konstrukcyjne. Komentarze do fotografii: 2,3 - Ostatecznie widoczna na tych zdjęciach podstawa, wyłożona wykładziną okazała się niepraktyczna i została zastąpiona nową drewnianą ale naśladującą teren wyłożony kostką brukową. 4 - Głowica obracana jest silnikiem znajdującym się na samym dole (wszystkie silniki to silniki krokowe). Napęd przenoszony jest wałkiem, znajdującym się wewnątrz widocznej rury mosiężnej a zasilanie silników symulujących ruch turbinki i ruch łopat oraz zasilanie oświetlenia głowicy doprowadzone jest przewodami, które znajdują się wewnątrz wspomnianego wałka. To główny powód, że wiatrak ma ograniczony kąt skrętu. 5 - To właśnie napęd obrotu głowicy. 6,7 - pokazują wnętrze głowicy wiatraka. Widać tam silnik napędzający łopaty wiatraka (z przekładnią). I dokładnie widać jak strasznie tam ciasno. Widać tu również silnik symulujący obroty turbinki. Napędzana jest ona paskiem gumowym, takim jak stosuje się w magnetofonach. W rzeczywistości napęd był przenoszony oczywiście w odwrotną stronę – z turbinki na mechanizmy wiatraka i najczęściej za pomocą przekładni zębatych i wałka. 8 - widać płytki drukowane. Na samym dole płytkę mieszczącą obwody sterujące obrotem głowicy, wyżej "centrum" sterowania wiatrakiem - to tam, gdzie jest pusta chwilowo 40-pinowa podstawka do mikroprocesora AT89C51 a na innych wzmacniacze do sterowania wszystkimi silnikami krokowymi. 9 - Na tej fotografii widać 40 żyłowy kabel będący częścią połączenia całego układu (tej podstawki, w której docelowo będzie wspomniany mikroprocesor) z układem uruchomieniowym (symulującym działanie mikroprocesora) - to ten za klawiaturą. Na tym stanowisku obserwując zachowania się wiatraka i pisze się jego program sterujący, umieszczony później w pamięci mikroprocesora. Przy okazji można zobaczyć nową – wspomnianą poprzednio - podstawę wiatraka. A ponieważ w sterowaniu obrotem głowicy wykorzystywane są optotrony szczelinowe i przy zdjętej obudowie światło przeszkadzało w pracy, trzeba było dolne pomieszczenie zakrywać tekturką. I to właśnie widać. 10 - Tu dołączony jest do wiatraka nieco inny przedłużacz pozwalający na łatwiejszą wymianę mikroprocesora w czasie prób i pustą również chwilowo podstawkę do drugiego mikroprocesora - tym razem AT89C4051, odpowiedzialnego za pamiętanie i odtwarzanie melodii. 11 - To obudowa wiatraka, widać w jej wnętrzu okablowanie do zasilania oświetlenia. 12 - To skrzydła wiatraka i obudowa jego głowicy.
-
LATARNIA MORSKA Moja latarnia została wykonana ze sklejki. Jak większość moich modeli posiada sterowanie mikrokontrolerem rodziny INTEL w tym przypadku AT 80C51. Podstawa latarni mieści w sobie zasilacz latarni. W towarzyszącym jej domku, w którym (w rzeczywistości) zwykle znajdują się systemy zasilania awaryjnego, znajduje się sterowanie latarnią a pod uchylanym daszkiem kilkanaście przycisków do wyboru sposobu świecenia latarni. Latarnia może naśladować światła wszystkich latarni morskich polskiego wybrzeża. Takie założenie (chociaż niechybnie komplikuje wykonanie modelu) jest bardzo pouczające dla młodego człowieka, który bawiąc się modelem zapamiętuje wiele danych, ułatwiających mu późniejszą naukę np. techniki,geografii. Oczywiście nie naśladuje wiernie latarni, w których (dość wąski) strumień światła obraca się ale obserwator widzi taki sam obraz czasowy światła i przerwy jak w rzeczywistości. Latarnia potrafi naśladować (w tym przypadku noc a nie dzień) pracy od momentu uruchomienia siłowni, poprzez wędrówkę latarnika na jej szczyt uwidoczniony poprzez zapalanie się świateł na poszczególnych piętrach aż do wygaszenia latarni, kiedy robi się widno. Wygaszane są wtedy również wszystkie światła a włączane tylko migające czerwone światła na samej górze, w celu ostrzegania blisko przelatujących samolotów. W stosunkowo małej laternie (tak nazywa się pomieszczenie, w którym znajduje się źródło światła) umieszczona jest kilku watowa żarówka. W celu jej chłodzenia przez całość latarni zorganizowano przepływ powietrza. Wloty powietrza widać na samym dole latarni – wyloty znajdują się nad laterną tuż pod jej daszkiem. W tym samym strumieniu powietrza chłodzi się również zasilacz. Z tyłu towarzyszącego latarni domku widać włącznik zasilania. Widać również, że kabelek zasilający (zabawka jest zasilana napięciem 220 V) Wprowadzony jest przez środek podstawy w celu lepszego zabezpieczenia przed przypadkowym oderwaniem.
-
MODELE BUDYNKÓW (Latarnia morska,wiatrak,młyn wodny,dworce kolejowe) Przeglądając forum znalazłem materiał o (chyba tylko planowanej) budowie latarni morskiej z 2007 roku. Zaciekawiła mnie ta notatka, bo i ja dwa lata wcześniej zbudowałem model latarni morskiej dla małego w tym czasie wnuczka. W zasadzie dokumentuje swoje prace – zarówno fotograficznie jak i opisowo ale nie są to dokumentacje zbyt szczegółowe a fotografie niezbyt dokładne, bo to przecież był jeszcze czas fotografii analogowych. Tym niemniej przytoczę krótki opis tej konstrukcji, bo temat uważam za dość wdzięczny i zapewne jeszcze nie raz znajdzie naśladowców. Przy okazji chciałem zademonstrować jeszcze inne trzy modele, które również wykonane były z myślą nie tylko zabawy ale i nauki. Są to modele wiatraka, młyna wodnego i dworca kolejowego. Osobiście zachęcam do wykonywania takich modeli, bo prócz satysfakcji konstruktora i wykonawcy, służą dobrej zabawie małych dzieci – w moim przypadku wnuczków ale i przy okazji zachęcają ich do zadawanie pytań o ich przeznaczenie i działanie. Ze względów na łatwiejsze przeglądanie tych materiałów opisze je w osobnych częściach, pod wyżej wspomnianymi tytułami.
-
- 1
-

-
Moja rada dla kolegi jest spóźniona o 10 lat i zapewne już nie aktualna ale może inni "budowlańcy" skorzystają z moich doświadczeń. Zrobiłem taki transporter nawet kilka lat wcześniej ale wtedy nie byłem uczestnikiem forum. To była i jest zabawka dla wnuczków. Jeżeli chodzi o taśmę to zrobiłem ją z płaskiej gumy grubości około 1.5 mm. W Warszawie dostać ja można (i wiele innych ciekawych materiałów) w składnicy chemicznej na ulicy Rzecznej 6. Do czego używana jest ta guma , nie wiem. Sprzedaje się ją z rolki o szerokości około 2 m - może nieco mniej, nie pamiętam dokładnie. Trzeba ją jednak obejrzeć dokładnie (i wymacać) bo widziałem już takie rolki (pewnie źle wymieszane przed wulkanizowaniem, które mają tendencje do przerwań). Taśmę można kleić butaprenem na zakładkę około 15 mm, ja później szlifowałem uskoki gumy. Załączam dwa zdjęcia jakie posiadam. Na jednym jest transporter jeszcze nie pomalowany. W domu zachowuje się znakomicie i obsłużył już kilku wnuczków - nie zdał egzaminu w piaskownicy, na co bardzo liczyłem. Mimo wykonania rolki napędowej również z gumy po dostaniu się tam piasku rolka się ślizga i nie przesuwa taśmy. Zwiększenie naprężenia taśmy za pomocą rolki napinanej sprężyną do granic przyzwoitości - nie pomogło.
-
POSEJDON - bocznokołowy statek rzeczny
adams38 opublikował(a) temat w Statki , okręty, okręty podwodne , żaglowce
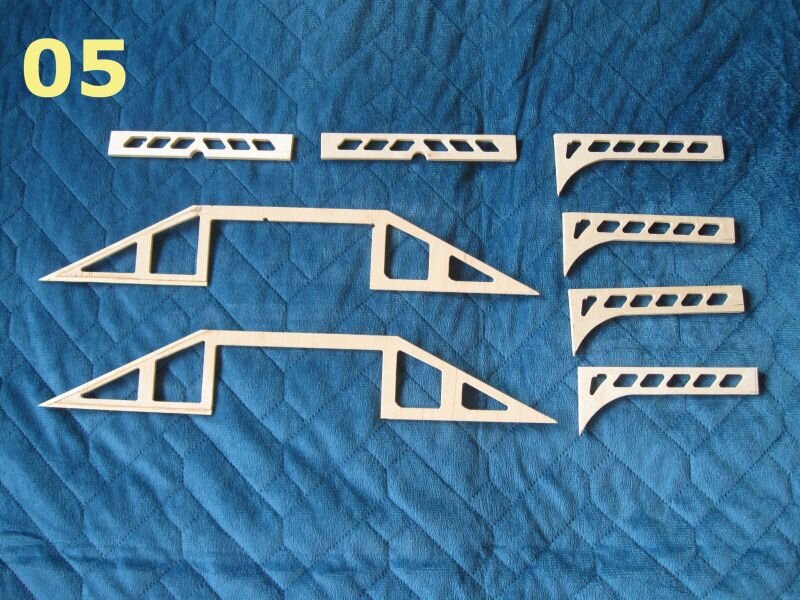
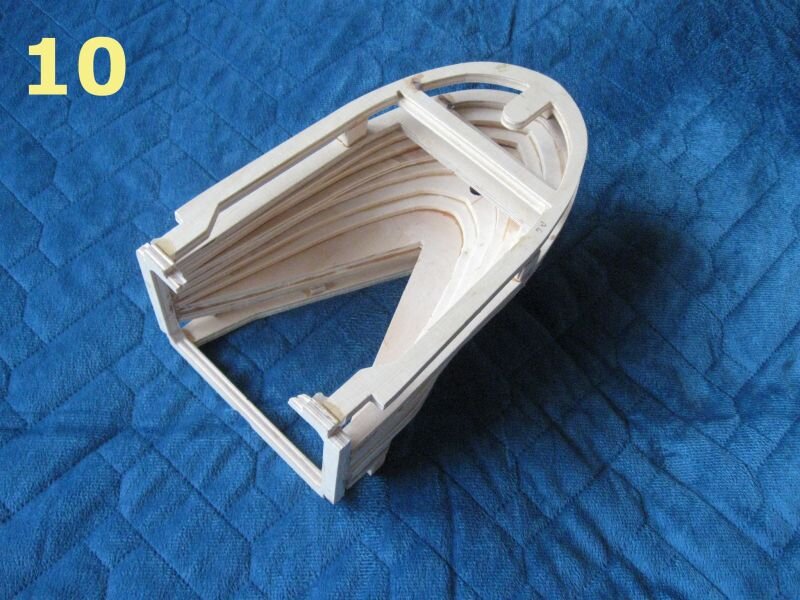
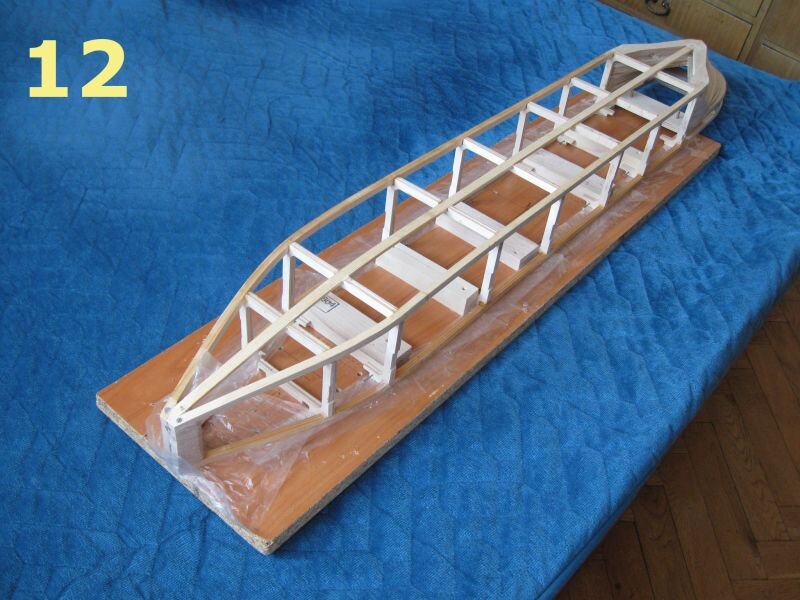
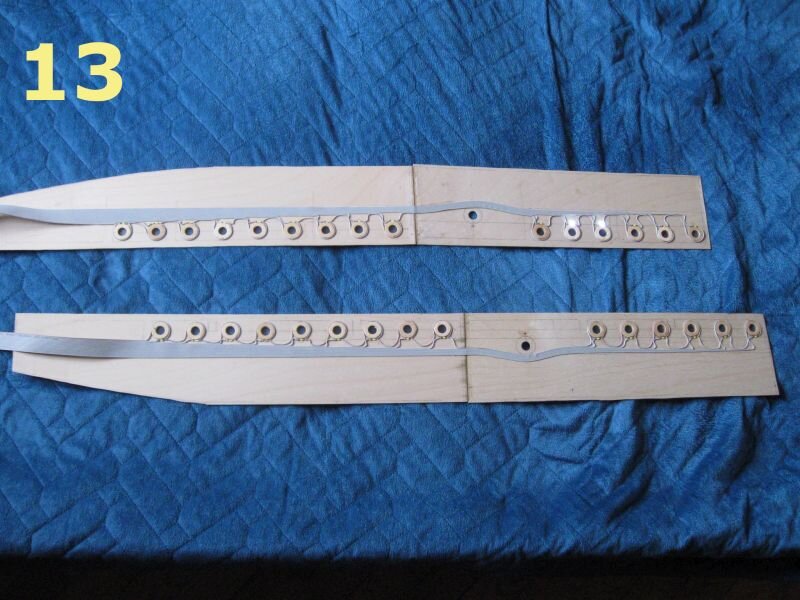
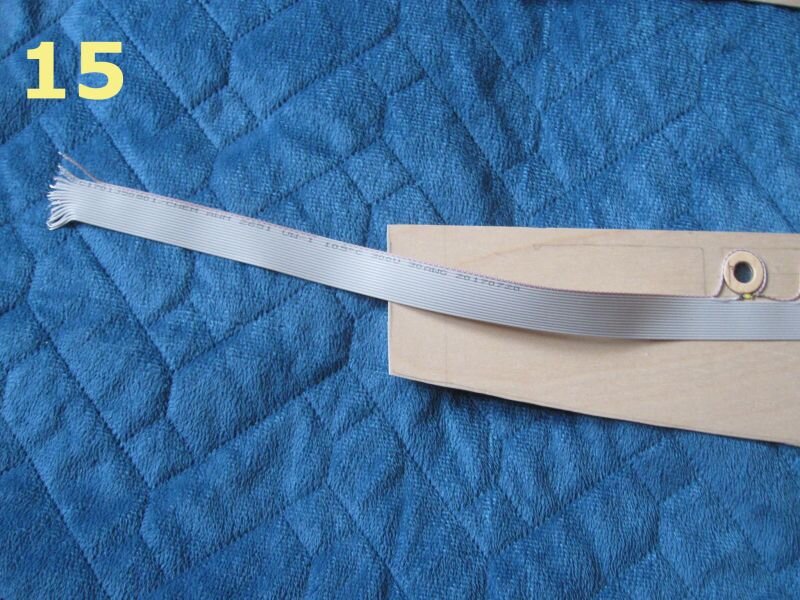
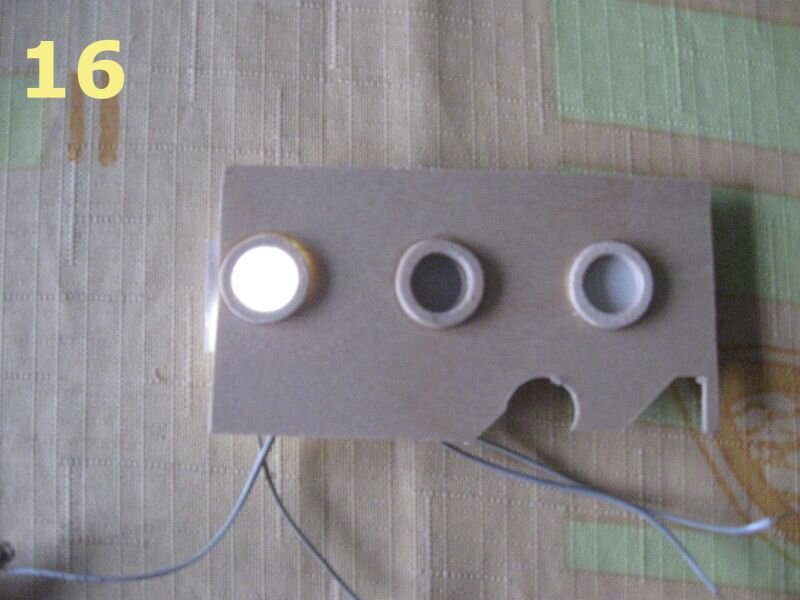
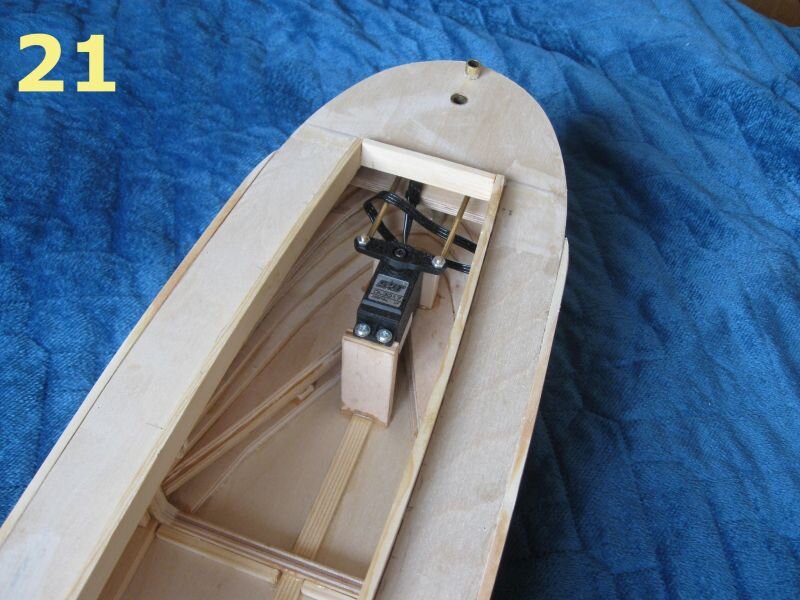
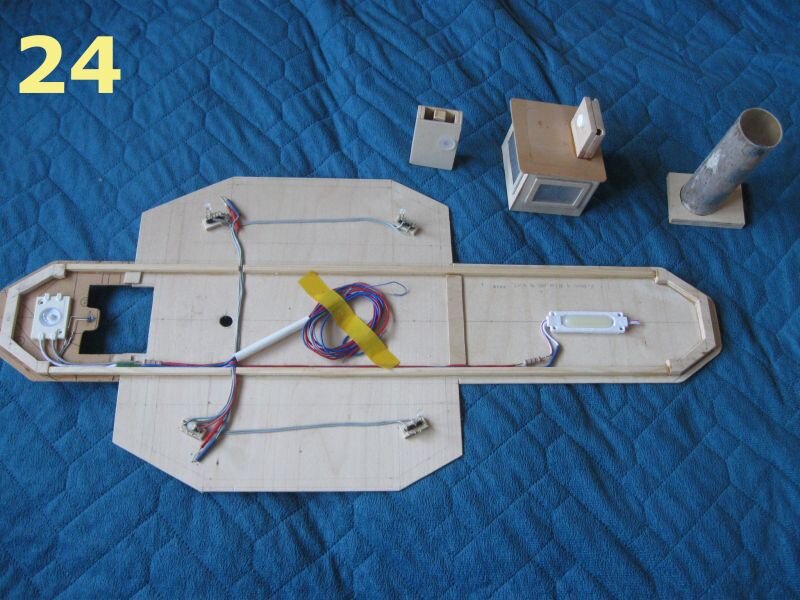
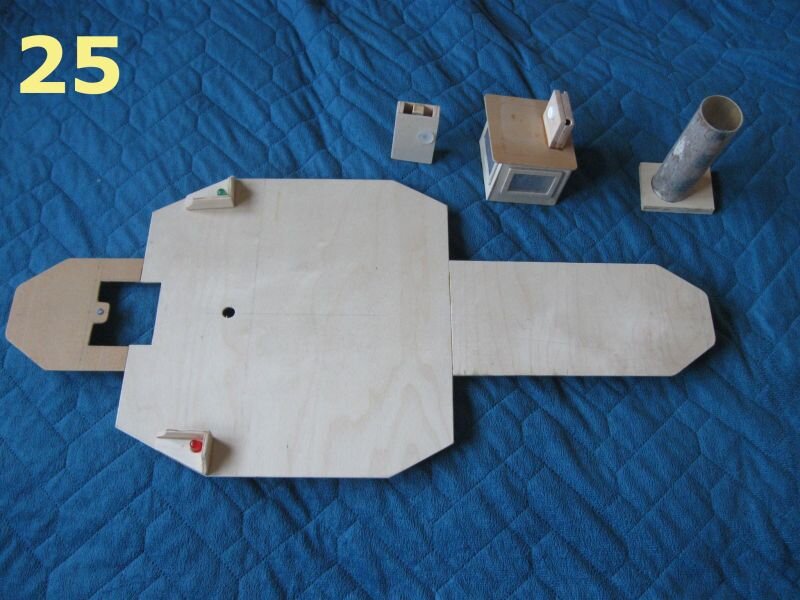
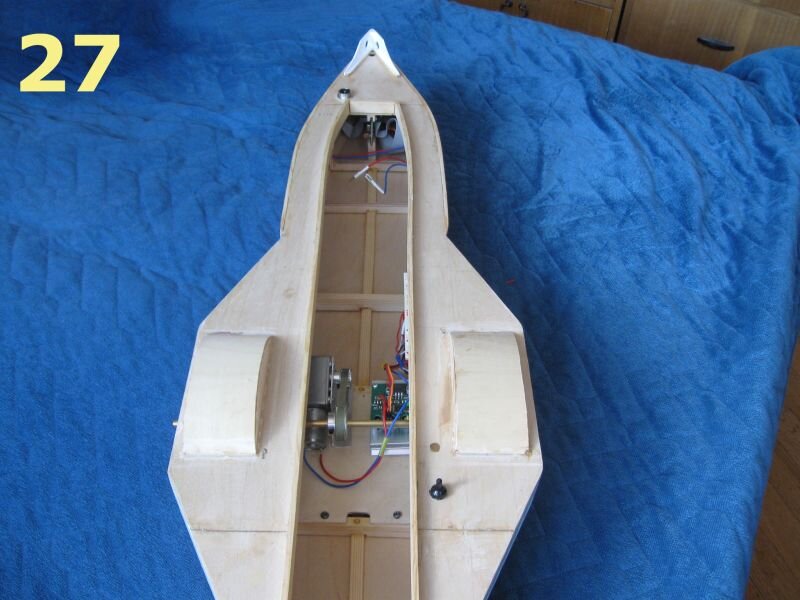
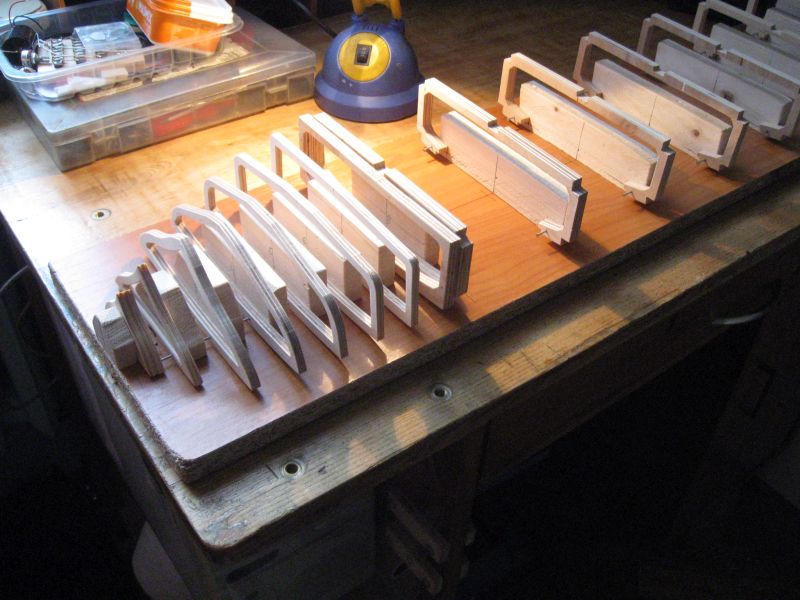
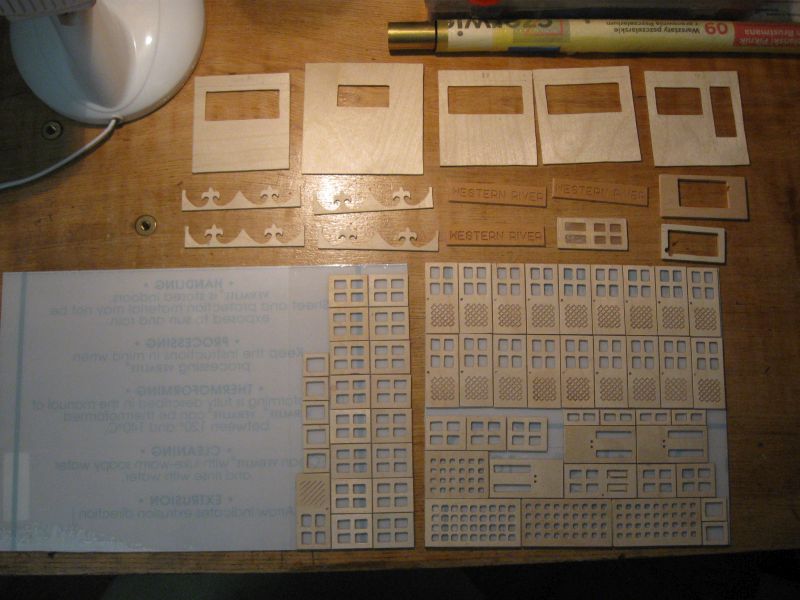
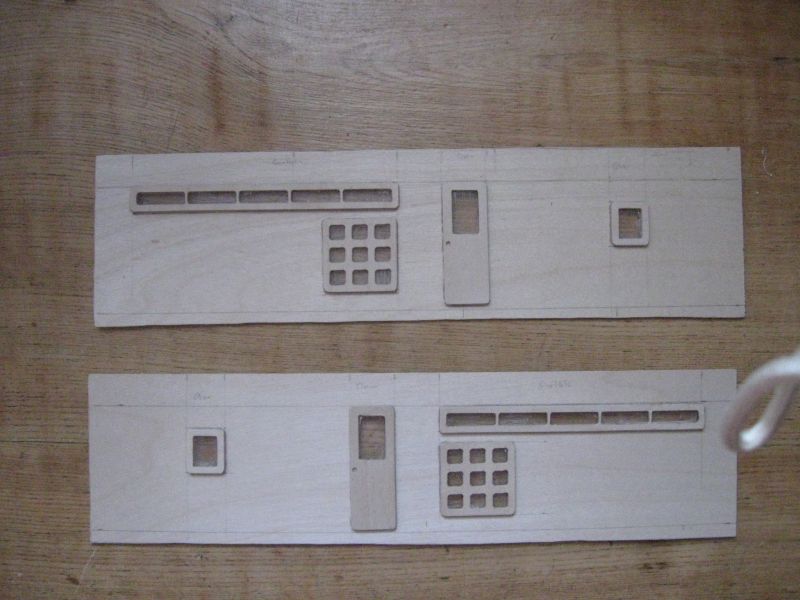
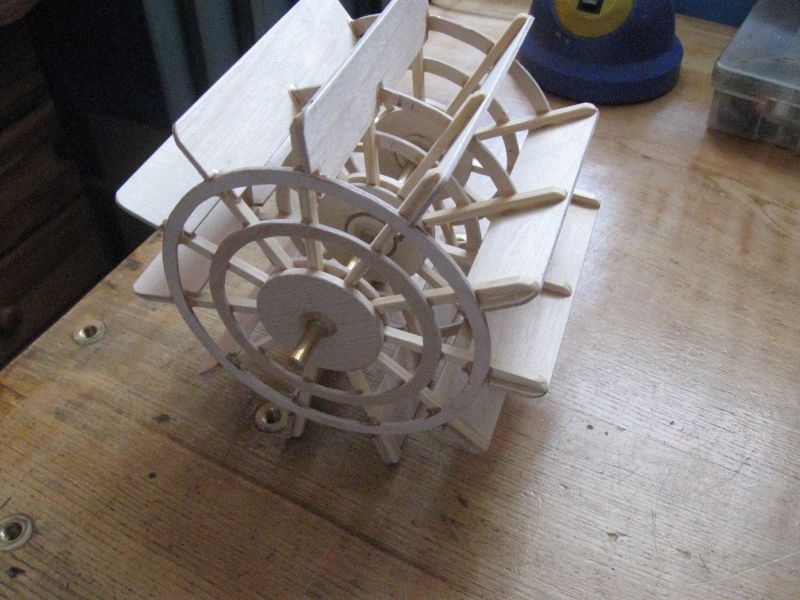
To drugi mój model w ostatnich latach budowany przy dość silnym wykorzystaniu frezarki CNC i wyposażony w nowoczesną aparaturę 2.4 GHz. Model nie jest wiernym obrazem żadnego istniejącego statku - to wynik zapoznania się (na przestrzeni wielu lat) z wieloma dokumentacjami i obserwacja czasami w naturze wielu statków - również tych pływających po Wiśle w dawnych czasach. Model ma klasyczną konstrukcję żebrową, krytą sklejką 1.5 mm i jest całkowicie klejony. Jedyne 5 śrub wspomagały klejenie dziobu a kolejne 4 służą do połączenia kadłuba z kilem - o którym będzie jeszcze mowa później. Oczywiście są jeszcze śruby mocujące elementy wyposażenie we wnętrzu statku ale to jedynie spełnienie wymagania ich demontażu w razie awarii lub przebudowy. Jak już wspominałem w poprzednim opisie (WESTERN RIVER) w dzisiejszych czasach nie opłaca się wykonywać samemu urządzeń zdalnego sterowania i dlatego większość wyposażenia elektronicznego została zakupiona. Jest tu drobna niekonsekwencja, bo do sterowania użyto sześciokanałową aparaturę lotniczą FLYSKY ale jest to aparatura dość wdzięczna, pewna i zdążyłem się już do niej przyzwyczaić gdyż to jest już 3 mój model z jej wykorzystaniem. Z powodu niedostępności - w czasie budowy modelu - stosowanego przeze mnie do tej pory regulatora obrotów Ultra Redox 45 R, w modelu zastosowano regulator obrotów firmy AVT. Jest nieco droższy ale łatwiej się konfiguruje. Dla niektórych modelarzy wadą może być (z założenia) ograniczenie ilości obrotów wstecznych, do 50 % obrotów w przód. Wydaje się jednak, że w przypadku modeli statków (z założenia niezbyt szybkich), jest to bez znaczenia. Wyjątkiem są niektóre człony wykonawcze jak: Syrena i oświetlenie, szczególnie kabin pasażerskich w kadłubie, które jest sterowane mikrokontrolerem i ma to w założeniu naśladować przypadkowe zapalanie i gaszenie oświetlenia w tych kabinach. Prawie wszystkie bocznokołowce rzeczne budowane były jako statki płaskodenne, ponieważ w większości przypadków przeznaczone były do pływania po rzekach często nieuregulowanych a więc z mieliznami, przemiałami itp. przeszkodami nawigacyjnymi. Jednak wszystkie budowane uprzednio przeze mnie bocznokołowce miały tendencje do przechylania się na jeden z boków. I ten obecnie opisywany zachowywał się podobnie, pomimo poszerzenia kadłuba w stosunku do znanych mi statków, umieszczenia ciężkich elementów wyposażenia możliwie nisko w kadłubie i wykonania wszystkich podzespołów wystających poza zarys kadłuba z możliwie najlżejszych elementów. Zanurzenie statku wynosi około 3.5 cm co odpowiada zanurzeniu przeciętnego statku boczno kołowego około 1.3 m co wydaje się być wartością prawidłową. To nienormalne zachowanie się modelu wynika (chyba) z niemożności odwzorowania w modelu takich proporcji wymiarowych i ciężarów poszczególnych podzespołów jakie występują w prawdziwym statku. Z tego powodu opisywany statek posiada kil z dość solidnym obciążeniem a więc już z tego powodu nie może być traktowany jako wierny model tego typu statków. Już po zakończeniu budowy zacząłem się zastanawiać czy dodatkowe obciążenie np. położenie na dnie metalowej wykładziny mogło by poprawić sytuację. Ta myśl zaczęła mnie niepokoić ponieważ statek zanurza się mniej (chociaż uważam, że prawidłowo), niż zakładane to było w dostępnych mi dokumentacjach. Np. w jednej z nich koła łopatkowe (pomimo tego, że były podejrzanie małe) dodatkowo umieszczone były tak wysoko, że model powinien się zanurzać praktycznie do linii okien. Wydało mi się to nieprawidłowe i jeszcze na etapie projektu starałem się wyliczyć dość dokładnie ciężar modelu a co za tym idzie jego zanurzenie. Biorąc to pod uwagę wykonałem koła łopatkowe większe niż w wielu modelach i umieściłem je niżej niż zalecano. Te obliczenia się sprawdziły model zanurza się do planowanej linii wodnej a koła napędowe pracują poprawnie. Model waży 4.7 kg. Rozważam, czy po dalszych próbach na wodzie nie powiększę jeszcze trochę tych kół. Komentarze do zamieszczonych fotografii: 1,2 - Kompletny model. 3,4,5,6 - Elementy podzespołów (programy do obróbki tych elementów na frezarce CNC,wymagają dziesięciokrotnie mniej czasu niż ich wykonanie ręczne) To zachęta dla tych kolegów, którzy nie zdecydowali się jeszcze na budowę własnej maszyny - zachęcam do obejrzenia strony http://frezarka-cnc.pl/category/frezarki-cnc/ 7 - Montaż kół łopatkowych 8 - Zmontowane koła łopatkowe 9,10 - Szkielet rufy - to jeden z najłatwiejszych (moim zdaniem) sposób na wykonanie skomplikowanego kształtu rufy 11,12 - Szkielet statku na "stole" montażowym 13,14,15 - Sposób wykonania oświetlenia kabin pasażerskich, na zdjęciu 14 widać sposób mocowania diod i oporników 16 - Próba sposobu oświetlenia kabin pasażerskich i wyniki prób. Z tyłu okienka umieszczone są białe płaszczyzny odbijające światło - separowane między okienkami 17,18 - Okablowanie świateł kabinowych. Przy okazji: rurki mosiężne warto stosować nie tylko do osi steru ale również do obsady masztów i przepustów kablowych 19 - Płytka mikrokontrolera sterującego światłami kabinowymi. 20,21,22 - Szczegóły budowy kadłuba statku 23,24,25 - Elementy nadbudówki 26,27,28 - Gotowy kadłub statku, na zdjęciu 26 widać goldpiny do połączenia układów elektrycznych kadłuba z nadbudówką statku, na zdjęciu 27 widać napęd paskiem zębatym kół łopatkowych i regulator napięcia AVT 29 - Nadbudówka. Dwa gniazda elektryczne na przednim pokładzie to zamocowania masztu z lampą pozycyjną i zamocowanie reflektora 30 - Nadbudówka. Widoczne są 3 RC-swicht'e dp włączania świateł i syreny oraz głośnik syreny 31 - Kil statku (przygotowany do malowania. Mam świadomość, że model nie spełnia żadnych wymagań, żeby startować na jakichkolwiek zawodach ani brać udziału w jakichkolwiek pokazach. Bodźcem do budowania była tylko chęć zmierzenia się z trudnościami konstrukcyjnymi i technologicznymi oraz i zapoznanie z nimi młodszego pokolenia.
-
Poszukiwałem jak narazie bezskutecznie serwomechanizmu HS 645, bo jako "stoczniowiec" potrzebuje serwa raczej mocnego. W sklepie zaoferowano mi "odpowiednik" nawet nieco mocniejszy ale cyfrowy. Jest to DL 3017 i zapewniono mnie, że przy "obecnym ustawieniu" ( z czego wywnioskowałem, że można go inaczej zaprogramować) będzie sie zachowywać jak serwo analogowe. Czy ono da się programować nie wiem, bo ja się do tej pory tym nie interesowałem a na stronach sklepu brak jest o nim wszelkich danych - widać u nich to nowość. I chyba w ogóle nowość, bo na forum nie znalazłem ani jednej wypowiedzi na jego temat. Na stronach internetowych jest bardzo chwalone. Próby w domu potwierdziły, że w czasie pracy pobiera bardzo duży prąd - zasilacz 1 A zupełnie nie dawał rady jednak po zasilaniu go z twardego źródła zachowuje się bardzo dobrze. Kosztuje niecałe 90 zł. Miałem wątpliości czy odbiornik nie ulegnie przeciążeniu, więc próby wykonałem sterując go symulatorem a zasilanie dostarczyłem osobno z akumulatora 12 V za pośrednictwem stabilizatora napięcia 7805. Wydaje się, że ten sposób zasilania - nieco skomplikowany ale nie za bardzo - może być lekarstwem na wiele kłopotów, wynikłych z dostarczenia zbyt małego prądu do sterowania serwem cyfrowym. Zasilanie podawane jest z twardego źródła a odbiornik przesyła jedynie sygnał sterujący. W żadnej dokumentacji nie znalazłem również oznaczenia końcówek (wszystkie 3 żyły są czarne) ale już udało mi sie je zidentyfikować. Liczba 12 wytłoczona na złączu to "-" minus, później jak zwykle "+" plud i sygnał. Przy okazji zrodziły mi się następne pytania: 1. Czy generalnie serwomechanizmy posiadają zabezpieczenie (elektryczne) przed odwrotnym dołączeniem wtyczki ? 2. Czy odbiorniki np. FLYSKY są w stanie dostarczyć tak dużego prądu, jakiego wymagają serwa cyfrowe ? 3. Jakie parametry ustawia się w serwie cyfrowym w czasie programowania ? 4. Czy serwo programowalne różni się zewnętrznie od zwykłego np. dodatkowymi stykami ? 5. Czy opisane serwo jest programowalne ? Pozdrowienia dla miłośników serwomechanizmów.
-
Western River
adams38 odpowiedział(a) na adams38 temat w Statki , okręty, okręty podwodne , żaglowce
Odpowiedź dla kol. cezar'a65: Ja jednak jestem optymistą, ma wyporność zgodną z założeniami, ma dobrą stabilność poprzeczną (straszyli mnie, że sie przewróci - jest daleki od tego) a koło napędowe ma wystarczająco silny moment obrotowy. Bardzo podobny (wymiarowo) model był demonstrowany na mistrzostwach w Dębowcu i zachowywał się bardzo dobrze. Trudności ze skrętami mogły być spowodowane istnieniem jednego steru a nie trzech - jak jest wymagane - słyszałem już o takim przypadku. Pozdrawiam. -
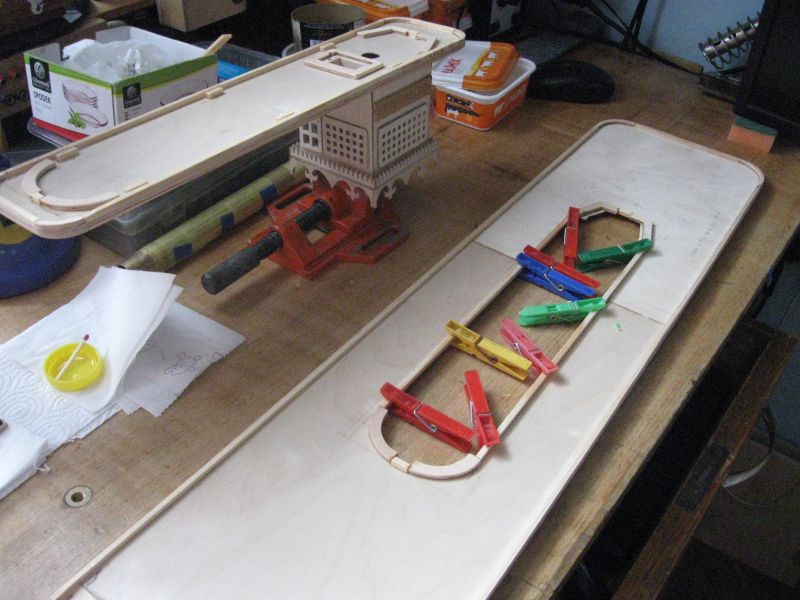
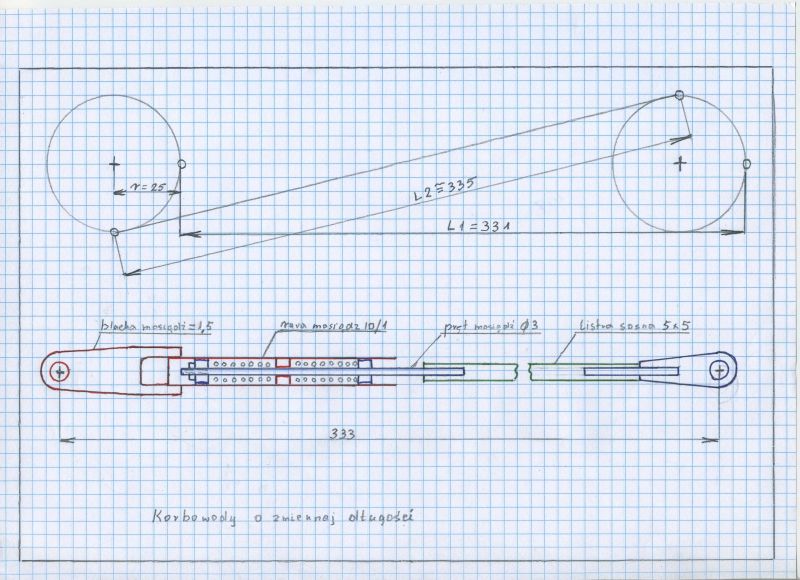
Budowa statku WESTERN RIVER To mój ostatni model budowany praktycznie przez zały rok 2019 ale pierwszy, do którego budowy dość solidnie wykorzystywałem frezarkę CNC a którą właśnie w tym celu zaprojektowałem i zrobiłem. Przy okazji jej dokładny opis znajduje sie na stronie: http://frezarka-cnc.pl/category/frezarki-cnc/ To nie tylko formalny opis maszyny ale analiza koncepcji jej powstania, dyskusja parametrów, możliwości zakupu materiałów i podzespołów i analiza jej kosztów. Zachęcam do oswiedzenia tej strony. A teraz o modelu statklu. Statek był budowany według różnych szczątkowych wiadomości o jego wyglądzie i konstrukcji. Najistotniejszym źródłem informacji były bardzo stare i skąpe plany zamieszczone, prawdopodobnie w piśmie „Modelarz” - data publikacji nieznana. Przy budowie nie zachowano żadnej powszechnie stosowanej skali, ponieważ nigdy nie istniało założenie wystawiania go na jakiejkolwiek wystawie lub zgłaszanie do konkursu. Z tego samego powodu model m drobne ustępstwa w wykonaniu pewnych szczegółów. Robiony był w zasadzie z myślą o zabawie z wnuczkami. Starałem się zrobić model możliwe duży, jednak z ograniczeniem wynikającym z rozmiaru wanny, w której miał odbyć próby obciążenia, stabilności, braku przecieków – (wyjście trzonów sterowych w kadłubie znajduje się poniżej linii wodnej) – i (o ile to możliwe), skuteczności napędu. Żaden z dostępnych materiałów nie zawierał wskazówek, co do stosowania napędu (w tym modelu to sprawa bardzo trudna), aparatury i członów wykonawczych zdalnego sterowania, szczegółów konstrukcyjnych, materiałów i szczegółów wykończenia. Z tego powodu u wielu osób może powstać przekonanie, iż statek odbiega od swojego pierwotnego (najczęściej publikowanego na różnych zdjęciach) wzoru. Aczkolwiek to nie jest całkowicie słuszny pogląd ponieważ te statki ewaluowały przez cały XIX i XX wiek zachowując ze starej koncepcji jedynie tylne koło napędowe a różniąc się czasami istotnie w innych szczegółach. Rzeczywisty statek tego typu z napędem tylnokołowym, miał napęd o dość prostej konstrukcji. Dwucylindrowa maszyna parowa - dwustronnego działania - napędzała koło napędowe statku za pomocą dwóch dość długich korbowodów przesuniętych w fazie o 90 stopni. Ponieważ tłoczysko, związane z tłokiem maszyny parowej znajdowało się blisko ściany przez którą przechodził korbowód napędzający koło napędowe, otwór w ścianie mógł być stosunkowo mały. Jednakże w modelu, który powszechnie wykorzystuje napęd za pomocą silniczka elektrycznego sprawa zaczyna się komplikować. Można tu zastosować kilka rozwiązań ale każde z nich jest kłopotliwe w realizacji. Chcąc w wierny sposób naśladować to rozwiązanie należało by wykonać dwa suwaki napędzane korbowodami z wału sprzężonego z silnikiem elektrycznym a z suwaków przenosić napęd – również za pomocą korbowodów na koło napędowe. Jak widać jest to rozwiązanie kłopotliwe, wymagające dodatkowo dokładnej zgodności wymiaru wykorbień na wale silnika elektrycznego i koła napędowego. I dodaje sporo wagi a statki te budowane były z bardzo niskimi kadłubami, ponieważ chciano zachować jak najmniejszą wagę z uwagi na pływanie po nieuregulowanych i płytkich rzekach. Drugim sposobem jest połączenie obu wałów napędowych wspólnymi korbowodami. Niestety w tym przypadku otwory w ścianach przez które przechodzą wspomniane korbowody mają dużą wysokość (podwójna wielkość wykorbienia) i dodatkowo poruszający się model zdecydowanie odbiega swoi, widokiem od widoku rzeczywistego statku. Następnym rozwiązaniem jest jak poprzednio połączenie obu wałów wspólnymi korbowodami ale z taką konfiguracją, żeby oba wały obracały się w przeciwnych kierunkach. Usytuowanie ścian przez którą przechodzą korbowody w połowie ich długości (albo bardzo bliskopołowy ich długości) minimalizuje wielkość otworu potrzebną do ich wyprowadzenia na zewnątrz. Takie rozwiązanie minimalnie odbiega wyglądem od wyglądu rzeczywistego statku. Niestety napotykamy tu na jedną trudność a mianowicie że odległość między osiami wykorbień zmienia się w funkcji kąta położenia wykorbienia. Wniosek: Korbowody powinny mieć zmienną długość, mówiąc inaczej być elastyczne – mieć zdolność przy działaniu pewnej siły do kurczenia się bądź rozciągania. Takie właśnie rozwiązanie zostało tu zastosowane. Nie wiem czy ja pierwszy wpadłem na tem pomysł ale mogę powiedzieć, że się dobrze sprawdził. Zamieszczony poniżej rysunek pokazuje konieczność zastosowania w tym przypadku korbowodów o zmiennej długości i sposób realizacji tego rozwiązania. Pokazane na rysunku wymiary dotyczą konkretnego modelu a same detale nie zawsze są dokładnie odwzorowane. Do napędu użyto silnika DFRobot DC 12 V z przekładnią ślimakową. Dodatkowa przekładnia umożliwia praktycznie utworzenie wału do umieszczenia na nich wykorbień. Minęły już czasy, w których jednym z głównych trosk modelarza było zbudowanie – to było dość trudne, lub zakupienie radiowej aparatury sterującej – to było z kolei dawniej dość drogie, przedsięwzięcie. W dzisiejszych czasach oferta sklepów modelarskich w tej dziedzinie jest bardzo bogata a aparatury bardzo dobrze spełniające potrzeby hobbystów, są do nabycie w rozsądnych cenach. Do sterowania wybrano aparaturę FLYSKY 6 kanałową zaopatrzoną dodatkowo w skromną telemetrię. Odbiornik przesyła zwrotnie do nadajnika fakt swojej aktywności i dodatkowo informuje i stanie napięcia, którym jest zasilany. O ile pierwsza zaleta jest bardzo praktyczna, bo operator jest natychmiast informowany o utracie zasięgu – co w tym przypadku jest raczej mało prawdopodobne o tyle druga możliwość jest wysoce problematyczna. Odbiornik zasilany akumulatorem 12 V poprzez stabilizator napięcia, zasygnalizuje obniżenie zasilania w sytuacji, kiedy inne urządzenia już dawno stracą zdolność działania. Taki system sprawdza się w urządzeniach zasilanych z baterii, która bezpośrednio zasila odbiornik. Niestety rozbudowane urządzenia telemetryczne tej firmy, są praktycznie niedostępne. Do skutecznego działania całego modelu potrzebny jest jeszcze serwomechanizm pełniący rolę „maszyny sterowej”, regulator napięcia dla silnika napędowego i 4 RC Switch’e, które są jednak łatwo dostępne w handlu w umiarkowanych cenach. Przy okazji, wiele osób a nawet sprzedawców w sklepach modelarskich ma niepochlebną opinię o regulatorze obrotów ULTRA 45R Redox. Ja tej opinii nie podzielam - uważam podzespół za bardzo dobry. Modele, które nie pełnią jedynie funkcji wystawowych, muszą być otwierane, żeby jak w tym przypadku umożliwić dostęp do aparatury sterującej i innych urządzeń. Ze względu na bardzo niski kadłub i dużą wysokość nadbudówek, zaprojektowano ten podział ponad pierwszą kondygnacją statku. To dodatkowo umożliwia łatwy dostęp do kadłuba statku jak i do górnych nadbudówek. Ze względu natomiast na dużą wysokość statku a co za tym idzie obawę o jego stabilność na wodzie większość urządzeń starałem się umieścić w najniższej części kadłuba. Kadłub wykonany jest w większej części za sklejki 1.5 mm, opartej na konstrukcji żebrowej a tylko jego przednia część jest wykonana z listewek – metodą „słomkową”. Jest jednak metoda bardzo kłopotliwe, wymagająca wstępnego gięcia i skręcania listewek po zmiękczeniu w gorącej wodzie a później ich dokładnego wysuszenia przed klejeniem. Jednocześnie jest to metoda wolna, bo praktycznie pozwala na przyklejenie 2 lub 3 par listewek na dobę. Nadbudówki wykonane są również z takiej samej sklejki jak kadłub, łączonych listewkami 4 lub 5 mm. Tylko w niektórych przypadkach stosowano profile o innym kształcie i z innych materiałów. Jednym z wyjątków są kominy które zostały wykonane z laminatu szklano – epoksydowego. Kilka elementów jak ozdoby i okucia wykonane są z mosiądzu. Warto zauważyć, że bardzo dużo prac zostało wykonanych za pomocą frezarki CNC, bez której wykonanie stosownych elementów trwało by kilkakrotnie dłużej, wymagało by wielu godzin pracy i nigdy nie osiągnięto by takiej dokładności Całość po pomalowaniu tradycyjnymi kolorami pomalowano lakierem poliuretanowym. Odbiornik aparatury sterującej zamontowany jest w sterówce, ponad którą wystają jego anteny. (na zdjeciach nie ma anten) Dwie trzy żyłowe skrętki biegną od niego bezpośrednio do serwomechanizmu sterowego i regulatora obrotów silnika, znajdującego się w tylnej części kadłuba a cztery pozostałe do RC Switch’y, znajdujących się w przedniej części II kondygnacji. Przy nich znajdują się oporniki diod oświetlających II i III kondygnację i stabilizator napięcia 5 V do zasilania odbiornika. Komunikacja między kadłubem a zdejmowanymi nadbudówkami realizowana jest za pomocą komputerowego 15 – pinowego złącza szufladowego. Głośnik syreny i jego układy elektryczne znajdują się w przedniej części I kondygnacji. W modelu zastosowano serwomechanizm steru firmy Hitec HS 645 mg o momencie 11.4 kgcm. To całkiem wystarczające nawet do uruchomienia 3 sterów. Kanały 5 i 6 wykorzystane zostały do zapalania lampy na przednim maszcie i oświetlenia wszystkich pomieszczeń statku. Jeden kanał pozostał chwilowo nie wykorzystany. Przewiduje jego użycie do sterowania wytwornicy dymów ale dotychczasowe próby jej wykonania nie przyniosły jeszcze zadowalających rezultatów. Opis załączonych fotografi. 00_Widok modelu.jpg 01_Frezowanie żeber.jpg 02_Gotowe żebra.jpg 03_Rozruch stoczni.jpg 04_Wykonanie dziobu.jpg 05_Kadłub w stanie surowym.jpg 06_Prefabrykaty do montażu.jpg 07_Prefabrykaty rur do wykonania kominow.jpg 08_Podstawy diod oświetleniowych.jpg 09_Ściany pierwszej kondygnacji.jpg 10_Ściany pierwszej kondygnacji_2.jpg 11_Montaż koła napędowego.jpg 12_Zmontowane koło.jpg 13_Prace montażowe.jpg 14_Wklejanie filarów pierwszej kondygnacji.jpg 15_Schody dla pasażerów.jpg 16_Sterówka i podstawa anten.jpg 17_W stoczni wyposażeniowej.jpg 18_Elastyczne korbowody.jpg 19_Napęd, regulator obrotów i servo steru.jpg 20_Proby oświetlenia.jpg 21_Malowanie kaduba.jpg 23_Próby na wodzie.jpg