






wojtek-a
-
Postów
817 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
2
Odpowiedzi opublikowane przez wojtek-a
-
-
10 godzin temu, robloz napisał:
W tych kompletach (wiem bo mam) nie ma kabla do taranisa - mini USB.
Nie trzeba usb. Sygnal pobierasz z gniazda trenera mini jack.
-
Witam w Nowym Roku i zycze Panstwu wszystkiego dobrego!
Przestalo w koncu padac, zrobilo sie nienormalnie cieplo i wyszlo slonce. Pojechalem wiec na lotnisko przewietrzyc Darwina.
Wylatalem tylko dwie baterie ale najwazniejsze, ze sezon rozpoczety!
Ogolnie raczej OK, tylko w pierwszym locie mialem zaklocenia wizji. Wywalilem oryginalna antene nadawcza. Zalozylem krotka Menace. Jest duzo lepiej ale GPS nie zlapal satelit. Moze antena zaslaniala, bo w pierwszym locie bylo dobrze? Tak czy tak, cos jest nie tak, bo nic na OSD nie dziala. Chyba wymontuje ten modul gps, bo jest mi on do niczego potrzebny...Przydalby sie tylko poziom stanu baterii. Zobacze, moze przeflaszuje program na nowsza wersje albo postawie go na INAV-ie? Najwazniejsze, ze mi sie w miare dobrze lata...
Jako dowod, krotki montaz DVR tragicznej jakosci.
ps:
Nie nasmiewamy sie! To moje pierwsze kroki z prawdziwym kladem. Latam zachowawczo. Nie chce za szybko popsuc. Moje ladowania wygladaja jak na filmnie?. Jakies rady??
-
Nie mam w planie wozenia GoPro czy innych balastow i wzialem 4S 1500 mAh. Dla mnie jest OK. Moglem kupic 1800 albo nawet 2000 mAh, bo na tej za dlugo nie polatam, tzn. jeszcze nie wiem, bo nie wylatalem accu do konca.
Balem sie brac 5 albo 6S, bo fabryczny ESC nie ma czujnika poboru pradu (?). Nie chcialem przesadzic...
Maszyna wydaje sie dosc ciezka (moj wazy 392g bez baterii), ale wznosi sie na czterech celach bez najmniejszego wysilku.
-
Najlepsze efekty w klejeniu PLA mialem za pomoca Loctite 406. Mozna dokupic jeszcze aktywator o symbolu 7457, 7455 albo ze zwyklym aktywatorem do CA. Jest jeszcze primer 770 albo 7239, ktory prawdopodobnie ulatwia klejenie, ale osobiscie nie sprawdzilem.
ps:
inne kleje jakich uzywalem to mniejsza lub wieksza porazka...
-
Cos niewielu z nas ostatnio lata quadami czy buduje..? A moze w tajemnicy..?
...Na poczatku grudnia, w przyplywie chwili czy czegos innego.., zamowilem takie siedmiocalowe bydle.
Nie latam dronami i nie wiem czy bede. Tzn. mam od jakiegos czasu maluszka o nazwie Mobula 6, ktory ogolnie jest chwalony ale nie sprawia mi radosci. Postanowilem dac sobie druga szanse i kupic cos wiekszego. Na poczatku chcialem skladac, ale za te pieniadze sie po prostu nie da... . Kupilem we Francji w sklepie, w ktorym sie zaopatruje. Zaplacilem troche drozej, ale mialem za dwa dni. Teraz jest promo na stronie producenta za niecale 140 dolarow chyba.
Obejrzalem kilka filmow na YT, z ktorych wynikalo, ze maszyna lata i sie skusilem.
Dzisiaj wykonalem dwa pierwsze loty (pogoda pod psem) i jeszcze nie popsulem!
Musze powiedziec, ze jestem w shocku! Ten model lata naprawde super! Nie mam porownania z czyms podobnym z wysokiej polki ale wrazenia sa tylko pozytywne. Quadzik jest super stabilny (na poczatku myslalem, ze latam w Angle?!). Swietnie reaguje na ruchy dragami. Silniki cichutkie, jakby mialy jakies drogie lozyska... . Kamera Caddx Ratel na pokladzie, ktora lubie. W cenie regulowany VTX do 0.8 W i GPS bes magnesu, ktory na niewiele sie przydaje.
Ogolnie za cene sredniego toothpicka nabylem dosyc pokazna maszyne. Na razie jestem zadowolony. Oczywiscie FC i ESC basic, bez wyszukanych ficzerow itp, ale model lata.
Kupilem go do latania spacerowego z elementami okrojonego freestajlu. Mysle, ze sie sprawdzi...
Postaram sie wkleic jakis DVR z nastepnego lotu. Niestety nowa kamera Runcam Split z zapisem HD polegla razem z Predatorem 2... a GoPro sie jeszcze nie dorobilem...

-
 1
1
-
-
Ciekawe!
Nie slyszalem do tej pory o tej klasie. Mam cos w tym guscie i musze powiedziec, ze jest fun??. Z bramkami bedzie chyba jeszcze wiekszy?...
-
Hmmm... z tym alarmem to juz sam nie wiem. Byl ustawiony tylko w OSD, bardziej jako informacja dla mnie. Mam tak w innych modelach i nic sie zlego nie dzieje. Nie uzywam skryptu, wiec radio nic nie sygnalizowalo.
Moze czegos nie wiem, ale wydawalo mi sie, ze sam alarm nie ma wplywu na zachowanie, prace i reakcje kontrolera..?
-
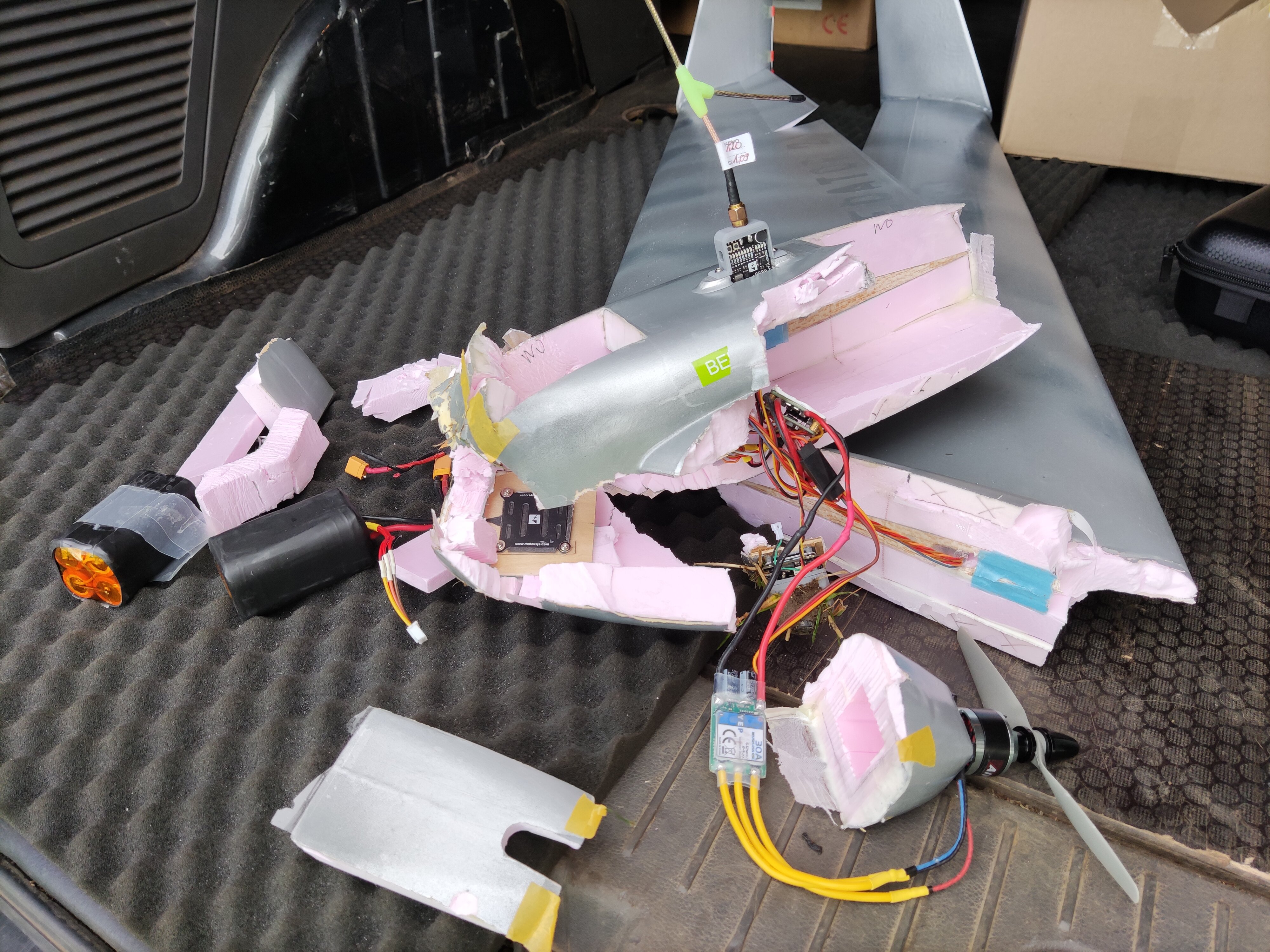
Tak mniej wiecej wyglada Predator 2 dzisiaj..tzn.wygladal, bo zostal rozbrojony z wyposazenia i nie bedzie naprawiany.
Hmmm, To juz nie jest pech, to chyba raczej klatwa!
Nowy silniczek i regiel przyjechali z holenderskiego Hbby Kinga w dwa dni. Zmontowalem wszysko do kupy. Dobralem smigielko. Dzisiaj miala sie odbyc kolejna proba. Model mial latac do wyczerpania akumulatorow celem sprawdzenia autonomii.
...Wszystko szlo w miare normalnie. Nowy tandem silniczek/smigielko robil robote jak trzeba.
Wystartowalem. Po osiagnieci ok. 100m wlaczylem poshold i skrzydlo zaczelo sobie latac po promieniu 150m. Predator zrobil nad lotniskiem prawie 30 km, zuzywajac niewiele energii. Wszystko wskazywalo na to, ze zalozone 80km sa w zasiegu reki...az tu ni z tego ni z owego samolocik zaczal nagle pikowac i przywalil w glebe zanim sie zorietowalem.
Troche moja wina, bo nie sledzilem caly czas lotu w goglach. Wyluzowalem sie za bardzo i nie zdazylem przejac sterow... Troche mnie dziwilo, ze model nie leci po okregu ze stala predkoscia tylko przyspiesza i zwalnia zmieniajac wysokosc, ale przez prawie pol godziny nic sie nie dzialo i stracilem czujnosc...
Video z DVR troche tlumaczy co sie stalo. Film pokazuje ostatnie okrazenie. Widac, ze model przyspiesza, tracac jednoczesnie duzo wysokosci (caly czas tak bylo, ale nie tak ekstremalnie). Potem lecac pod wiatr nabiera wysokosci jednoczesnie redukujac moc silnika.
I tutaj nagle dzieje sie cos dziwnego! 50s filmu! Popatrzcie na wskazania altimetru. Zwariowal? Wysokosc gwaltownie wzrasta. Po kilku sekundach jakby FC sie zorietowal i chcial wyrownac, pikujac na leb na szyje, a ze to wszystko byla nieprawda, to przywital kreta...
Jutro bede sprawdzal co z wyposazenia jeszcze dziala.
Jak juz pisalem Predator 2 nie bedzie naprawiany. Jak sie otrzasne z kolejnego szoku, zbuduje od poczatku nastepny...
ps:
chyba przedwczoraj ogladalem na kanale Pawla Spychalskiego, odcinek poswiecony problemom z althold w quadach i tak mi sie nasunelo pytanie: czy zawiodl jakis czujnik czy system/program sobie nie poradzil..?
-
Mikolaj przyslal nowe graty migiem (29-tym; cha cha ale zabawne...) wiec pracowalem wiekszosc weekendu w pocie czola, zeby dzisiaj oblatac skrzydlo po naprawie.
Niestety nie nalatalem sie za bardzo. Upalilem silnik.
Tym razem nagrywalem i udalo sie zrobic analize, ktora wykazala, ze zaraz po starcie nastapil gwaltowny pic poboru pradu (widac w drugiej czesci filmiku na OSD) i zaraz potem model wyladowal...
...Hmmm, nie maja juz w skepie tego silnika; zamowilem ten sam model ale z mniejszym kV. Bede kombinowal z wiekszymi smiglami...
-
10 godzin temu, d2f napisał:
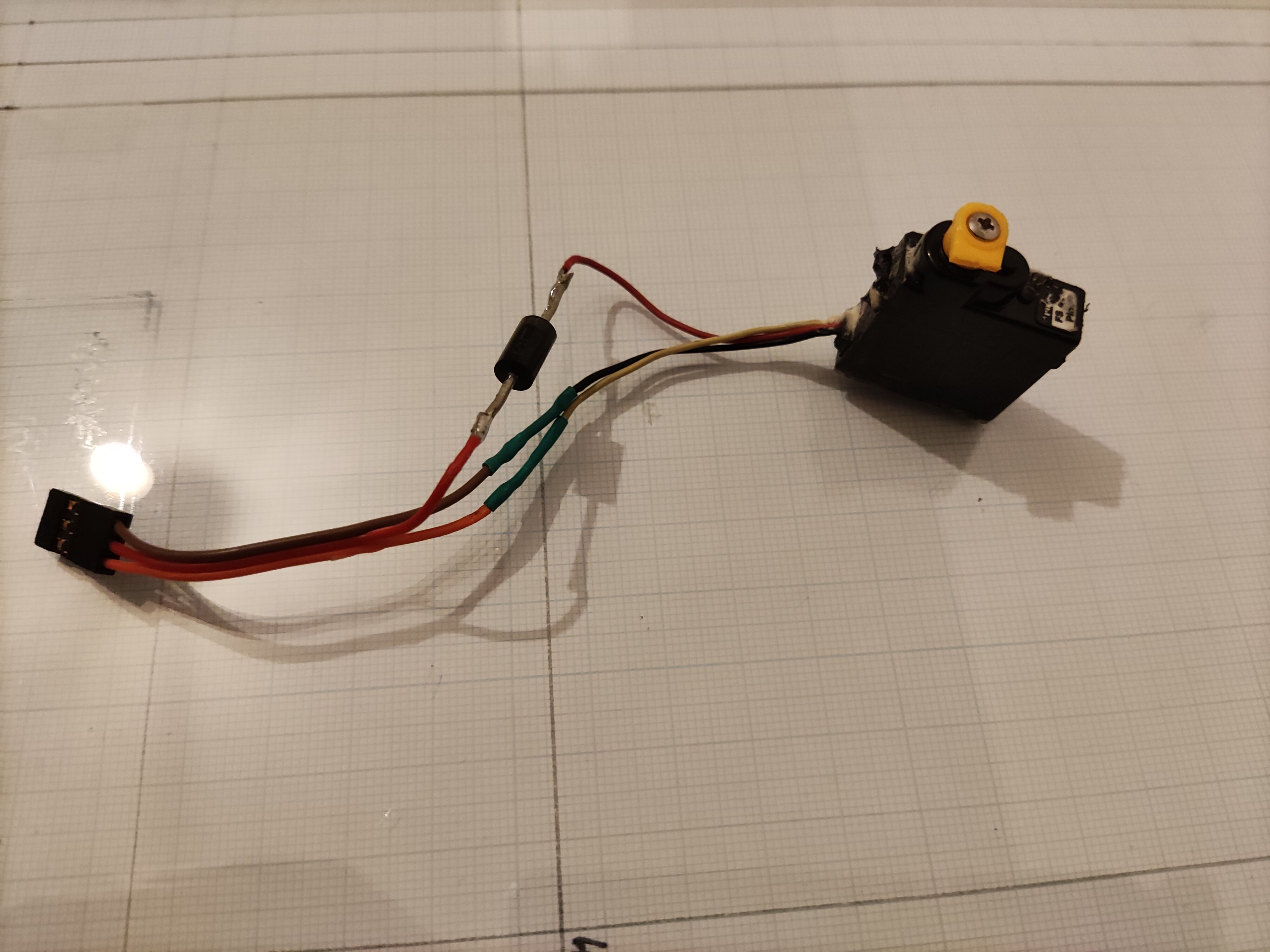
A ja mam pytanie do kolegów, którzy stosują te diody:
Ja miedzy innymi pisalem o tych diodach i podalem ten przylkad jako "ekstremalny " i ciekawostke. Kolega, ktory pytal chcial tanio...
To rozwiazanie dziala i to dobrze, tylko ze to tak jak zasilanie elektroniki bezposrednio z pakietu. Teraz w epoce wszelkiego rodzaju BEC-ow i Powerboxow wydaje sie to dziwne...
Nasi dziadowie i ojcowie latali przez lata, nawet duzymi makietami zasilajac elektronike z czterech akumulatorow NiCd i nic sie nie dzialo. Trzeba bylo po prostu pamietac, zeby pakiet byl przed kazdym lotem naladowany (pakiet po naladowaniu 6V a w duzym stopniu rozladowany powiedzmy 4V).
Aha,
Sytuacja Piotrka w pierwszym poscie jest troche specyficzna. Gdyby zasilil wszystko z regulowanego BECa a zbilby napiecie diodami na serwach L Voltage, byloby po bozemu
-
Hey wszystkim,
Pozbieralem sie w sobie i odbudowalem . Sprawie sobie na Mikolaja kamere i kontroler i moze jeszcze w tym roku uda sie zrobic pierwsze, testowe loty...
-
2 godziny temu, piotr jet napisał:
Zasilanie odbiornika oryginalne Jeti 2xLi-Jon 2600mAh
Do odbiornika chcę podłączyć serwa na wysokie napięcie , jak i serwa na stary standard czyli 6.0V.
49 minut temu, Marcin K. napisał:Wg mnie lepiej odwrotnie, zasilić HV przed odbiornikiem, i dać bec na odbiornik, szkoda ścieżek w odbiorniku na tak wysokie napięcie
Tylko Piotrek napisal, ze odbiornik jest przystosowany do HV, wiec nie ma problemu...
ps:
Jako ciekawostka ekstremalny przylkad rozwiazania.
Kazdemu serwu LV wlutowujesz po diodzie o odpowiednich parametrach (lub dwoch w szereg w zaleznosci od tego jakiego spadku napiecia potrzebujesz) i wpinasz po bozemu do odbiornika?.
edit: Wiesiek szybszy...
-
Godzinę temu, piotr jet napisał:
Trochę drogo to wychodzi , więc pytam?
Jak w miarę prosty i lub nie specjalnie kosztowny sposób obniżyć zasilanie serwa pomiędzy
odbiornikiem a serwem.
Najtaniej i najprosciej to wpiac w szereg jedna albo dwie diody np: Schottkiy'ego w zasilanie obwodu serw o mniejszym napieciu. Albo kupic jakis BEC/przetwornice o wystarczajacym pradzie dla ilosci serw.
Tzn:
Serwa HV wpiac bezposrednio do odbiornika a pozostale zasilic przez przez BEC z odczepu baterii (Y kabel czy cos w tym stylu). Do odbiornika wpiac tylko wtyczki z kablem sygnalowym serw.
-
3 godziny temu, Ares napisał:
Zaintersowanie tematem znikome
") ale pomino to będę sukcesywnie umieszczał zdjęcia z postępów w budowie.
ale pomino to będę sukcesywnie umieszczał zdjęcia z postępów w budowie.
Chrzanic zainteresowanie?. Jedz z koksem i wstawiaj zdjecia?.
Co do dzwigara to nie ma obaw. Bedzie beton z tymi plaskownikami.
Jak chcesz laminowac? Bezposrednio na folii czy na skrzydle/rdzeniu?
ps:
Pilniczek to sobie pozwole skopiowac. fajny patent.
...Osobiscie tne pianke CNC i teoretycznie moge sobie wkomponowac w profil niezliczona ilosc esow i floresow czy wpustek ale przekonalem sie na wlasnym styropianie, ze najlepiej wychodzi wyciecie golego profilu a potem robienie wglebien, rowkow etc...
-
W dniu 18.10.2021 o 10:20, a2j napisał:
Latam na stokowych ustawieniach i betaflight 3.5.7 jedynie pozmieniałem OSD i wprowadziłem swoje "rates". Przymierzam się do aktualizacji oprogramowania.
Baterie jak na razie mi nie puchną ale dbam o nie. Nie ładuję do HV a standardowo do 4.2V, po locie do storage 3,85V.
Latam do ok 3,2V pod obciążeniem po wylądowaniu napięcie wraca do 3,5-3,6V i rzadko latam na full gazie - takie patrolowe zwiedzanie.
Ja niby podobnie ale jakos mi puchna?..?
W dniu 18.10.2021 o 10:20, a2j napisał:Jeśli chodzi o gaz i jego reakcję to nie wiem co powiedzieć bo nie wiem dokładnie o co Ci chodzi - napisz coś więcej.
Na przyklad lece sobie na jakisjs malej wysokosci, tuz nad ziemia, potem znizam lot lub skrecam. Ja mu gaz, a on moze nie zgasl, ale zanim zakleszczy to czesto odbijam sie od ziemi. Albo lece troche wyzej, na stalym gazie, a model jakby sie napil redbulla, zaczyna sie wznosic...
W dniu 18.10.2021 o 10:20, a2j napisał:Warto włączyć też by silniki zawsze się kręciły po uzbrojeniu oraz "Air mode". Air mode to ustawienie dzięki któremu schodząc gazem poniżej zera silniki nadal utrzymują minimalny ciąg byś miał nad dronem kontrolę.
Moim dronokiem latam w mikroskopijnym ogrodku za chata. Najczesciej spacerowo-zwiedzajaco w Angle. Latajac w tym trybie nie zauwazylem pomocy Air mode. W Acro jest wiekszy fun, ale mam za malo miejsca i strach w oczach. Boje sie wpasc do sasiada i nie moge sie przelamac zeby puscic wodze fantazji.
-
Cool!
Zmieniales cos w Betafligh_cie czy latasz jak fabryka ustawila? Baterie Ci nie kucaja?
ps:
Mam od kilku miesiecy Mobule 6. Oryginalne accus spuchli mi szbko, mimo, ze nie rozladowywalem do samego konca. Kupilem Tattu 270mAh. Duzo lepiej, ale juz zaczynaja puchnac. Z teg co ogladam i czytam, to raczej standard..?
Ogolnie to ja latac nie umiem i nie mam porownania z innymi kladami. Najbardziej mi dokucza fakt, ze odpowiedz na draga gazu nie jest taka jakbym chcial i nie moge poprawic. Musze sie bardzo pilnowac, zeby nie przepadal. Moze to tak ma byc..?
-
Ciekawe. Nawet bardzo.
Dzieki za info.
-
7 godzin temu, Johny88 napisał:
A może możecie cos polecic w podobnej jakosci?
Nie ma jak na razie podobnej jakosci. Zostaje jedyny system DJI z oryginalnymi air unitami (lub Caddx z twojego linku albo nowy RunCam Link).
Shark Byte troche nie ma sensu na razie, bo gorszy. Sam licze, ze FatShark sie kiedys w koncu postara...
Tak jak Adam, latam analogowo bo mam troche inne potrzeby i mi pasuje, ale jakosc obrazu nieporownywalna z digitalem z DJI...
-
Popsulem dzisiaj wieczorem na wlasne zyczenie Predatora 2. Jestem bardzo zly i nie moge sobie wybaczyc, bo dobrze szlo i byly widoki na lepsze jutro...
Zamontowalem nowy FC i VTX i pojechalem zrobic zalegly test. Po okolo pol godzinie blakania sie nad lotniskiem przelecialem ponad 40km, majac jeszcze ponad polowe baterii (co sie prawie potwierdzilo po naladowaniu). Potrzebna bylaby mala korekcja sensora pradu, ale wyniki byly bardzo obiecujace.
Mialem ladowac, bo juz mi sie znudzilo, ale pomyslalem, ze podreguluje model w auto tune. No i zaczalem sie bawic. Model robil sie coraz bardziej gumowaty i leniwy az w koncu jakby spadl. Cos na ksztalt zwalenia sie.
Bylem dosyc nisko i troche za daleko, do tego bez gogli. Przywalilem strasznie.
Nowiutki FC nie dziala, nowiutka kamera polmana, raczej nie bedzie dzialac. Reszty nie sprawdzalem, bo nie mialem zdrowia.
Nic nie nagrywalem (mialem zgrac tylko raporty na koniec), wiec znowu nici z analizy...
...Dam sobie troche czasu zeby sie otrzasnac, zaczne odkladac na nowe graty i moze za jakis czas odbuduje, bo skrzydla da sie jeszcze wykorzystac.

-
Na pierwszy rzut oka nic dziwnego nie widze. Moze jutro zgram ustawienia z jednego z moich modeli dla porownania.
Piszesz, ze odleciales na kilometr. Jestes pewny, ze GPS byl zafiksowany w momencie startu i znal pozycje home?
edit: wstawilem moja konfiguracje z Predatora
# version
# INAV/MATEKF411SE 3.0.1 Jul 4 2021 / 14:22:48 (753c4479)
# GCC-9.3.1 20200408 (release)# start the command batch
batch start# resources
# mixer
mmix reset
mmix 0 1.000 0.000 0.000 0.000
# servo mix
smix resetsmix 0 3 0 -50 0 -1
smix 1 3 1 -50 0 -1
smix 2 4 0 -50 0 -1
smix 3 4 1 50 0 -1
smix 4 5 15 100 0 -1# servo
servo 0 1000 2000 1500 100
servo 1 1000 2000 1500 100
servo 2 1000 2000 1500 100
servo 3 1000 2000 1577 100
servo 4 1000 2000 1442 100
servo 5 1000 2000 1500 100
servo 6 1000 2000 1500 100
servo 7 1000 2000 1500 100
servo 8 1000 2000 1500 100
servo 9 1000 2000 1500 100
servo 10 1000 2000 1500 100
servo 11 1000 2000 1500 100
servo 12 1000 2000 1500 100
servo 13 1000 2000 1500 100
servo 14 1000 2000 1500 100
servo 15 1000 2000 1500 100# safehome
safehome 0 0 0 0
safehome 1 0 0 0
safehome 2 0 0 0
safehome 3 0 0 0
safehome 4 0 0 0
safehome 5 0 0 0
safehome 6 0 0 0
safehome 7 0 0 0# logic
logic 0 1 -1 2 2 0 0 5 0
logic 1 1 -1 6 1 10 0 0 0
logic 2 1 -1 8 4 0 4 1 0
logic 3 0 -1 0 0 0 0 0 0
logic 4 0 -1 0 0 0 0 0 0
logic 5 0 -1 0 0 0 0 0 0
logic 6 0 -1 0 0 0 0 0 0
logic 7 0 -1 0 0 0 0 0 0
logic 8 0 -1 0 0 0 0 0 0
logic 9 0 -1 0 0 0 0 0 0
logic 10 0 -1 0 0 0 0 0 0
logic 11 0 -1 0 0 0 0 0 0
logic 12 0 -1 0 0 0 0 0 0
logic 13 0 -1 0 0 0 0 0 0
logic 14 0 -1 0 0 0 0 0 0
logic 15 0 -1 0 0 0 0 0 0
logic 16 0 -1 0 0 0 0 0 0
logic 17 0 -1 0 0 0 0 0 0
logic 18 0 -1 0 0 0 0 0 0
logic 19 0 -1 0 0 0 0 0 0
logic 20 0 -1 0 0 0 0 0 0
logic 21 0 -1 0 0 0 0 0 0
logic 22 0 -1 0 0 0 0 0 0
logic 23 0 -1 0 0 0 0 0 0
logic 24 0 -1 0 0 0 0 0 0
logic 25 0 -1 0 0 0 0 0 0
logic 26 0 -1 0 0 0 0 0 0
logic 27 0 -1 0 0 0 0 0 0
logic 28 0 -1 0 0 0 0 0 0
logic 29 0 -1 0 0 0 0 0 0
logic 30 0 -1 0 0 0 0 0 0
logic 31 0 -1 0 0 0 0 0 0# gvar
gvar 0 0 -32768 32767
gvar 1 0 -32768 32767
gvar 2 0 -32768 32767
gvar 3 0 -32768 32767
gvar 4 0 -32768 32767
gvar 5 0 -32768 32767
gvar 6 0 -32768 32767
gvar 7 0 -32768 32767# pid
pid 0 0 0 0 0 0 0 0 0 0
pid 1 0 0 0 0 0 0 0 0 0
pid 2 0 0 0 0 0 0 0 0 0
pid 3 0 0 0 0 0 0 0 0 0# feature
feature -THR_VBAT_COMP
feature -VBAT
feature -TX_PROF_SEL
feature -BAT_PROF_AUTOSWITCH
feature -MOTOR_STOP
feature -SOFTSERIAL
feature -GPS
feature -RPM_FILTERS
feature -TELEMETRY
feature -CURRENT_METER
feature -REVERSIBLE_MOTORS
feature -RSSI_ADC
feature -LED_STRIP
feature -DASHBOARD
feature -BLACKBOX
feature -TRANSPONDER
feature -AIRMODE
feature -SUPEREXPO
feature -VTX
feature -PWM_OUTPUT_ENABLE
feature -OSD
feature -FW_LAUNCH
feature -FW_AUTOTRIM
feature VBAT
feature BAT_PROF_AUTOSWITCH
feature MOTOR_STOP
feature GPS
feature TELEMETRY
feature CURRENT_METER
feature AIRMODE
feature PWM_OUTPUT_ENABLE
feature OSD# beeper
beeper RUNTIME_CALIBRATION
beeper HW_FAILURE
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACTION_SUCCESS
beeper ACTION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
beeper CAM_CONNECTION_OPEN
beeper CAM_CONNECTION_CLOSED# map
map TAER# serial
serial 20 1 115200 115200 0 115200
serial 0 2 115200 115200 0 115200
serial 1 64 115200 115200 0 115200# led
led 0 0,0::C:0
led 1 0,0::C:0
led 2 0,0::C:0
led 3 0,0::C:0
led 4 0,0::C:0
led 5 0,0::C:0
led 6 0,0::C:0
led 7 0,0::C:0
led 8 0,0::C:0
led 9 0,0::C:0
led 10 0,0::C:0
led 11 0,0::C:0
led 12 0,0::C:0
led 13 0,0::C:0
led 14 0,0::C:0
led 15 0,0::C:0
led 16 0,0::C:0
led 17 0,0::C:0
led 18 0,0::C:0
led 19 0,0::C:0
led 20 0,0::C:0
led 21 0,0::C:0
led 22 0,0::C:0
led 23 0,0::C:0
led 24 0,0::C:0
led 25 0,0::C:0
led 26 0,0::C:0
led 27 0,0::C:0
led 28 0,0::C:0
led 29 0,0::C:0
led 30 0,0::C:0
led 31 0,0::C:0# color
color 0 0,0,0
color 1 0,255,255
color 2 0,0,255
color 3 30,0,255
color 4 60,0,255
color 5 90,0,255
color 6 120,0,255
color 7 150,0,255
color 8 180,0,255
color 9 210,0,255
color 10 240,0,255
color 11 270,0,255
color 12 300,0,255
color 13 330,0,255
color 14 0,0,0
color 15 0,0,0# mode_color
mode_color 0 0 1
mode_color 0 1 11
mode_color 0 2 2
mode_color 0 3 13
mode_color 0 4 10
mode_color 0 5 3
mode_color 1 0 5
mode_color 1 1 11
mode_color 1 2 3
mode_color 1 3 13
mode_color 1 4 10
mode_color 1 5 3
mode_color 2 0 10
mode_color 2 1 11
mode_color 2 2 4
mode_color 2 3 13
mode_color 2 4 10
mode_color 2 5 3
mode_color 3 0 8
mode_color 3 1 11
mode_color 3 2 4
mode_color 3 3 13
mode_color 3 4 10
mode_color 3 5 3
mode_color 4 0 7
mode_color 4 1 11
mode_color 4 2 3
mode_color 4 3 13
mode_color 4 4 10
mode_color 4 5 3
mode_color 5 0 9
mode_color 5 1 11
mode_color 5 2 2
mode_color 5 3 13
mode_color 5 4 10
mode_color 5 5 3
mode_color 6 0 6
mode_color 6 1 10
mode_color 6 2 1
mode_color 6 3 0
mode_color 6 4 0
mode_color 6 5 2
mode_color 6 6 3
mode_color 6 7 6
mode_color 6 8 0
mode_color 6 9 0
mode_color 6 10 0# aux
aux 0 0 0 1800 2100
aux 1 1 1 900 1200
aux 2 12 5 1800 2100
aux 3 10 2 1800 2100
aux 4 11 6 1800 2100
aux 5 53 2 900 1200
aux 6 3 2 900 1200
aux 7 28 1 1800 2100
aux 8 21 4 900 1200
aux 9 36 3 1800 2100
aux 10 0 0 900 900
aux 11 0 0 900 900
aux 12 0 0 900 900
aux 13 0 0 900 900
aux 14 0 0 900 900
aux 15 0 0 900 900
aux 16 0 0 900 900
aux 17 0 0 900 900
aux 18 0 0 900 900
aux 19 0 0 900 900
aux 20 0 0 900 900
aux 21 0 0 900 900
aux 22 0 0 900 900
aux 23 0 0 900 900
aux 24 0 0 900 900
aux 25 0 0 900 900
aux 26 0 0 900 900
aux 27 0 0 900 900
aux 28 0 0 900 900
aux 29 0 0 900 900
aux 30 0 0 900 900
aux 31 0 0 900 900
aux 32 0 0 900 900
aux 33 0 0 900 900
aux 34 0 0 900 900
aux 35 0 0 900 900
aux 36 0 0 900 900
aux 37 0 0 900 900
aux 38 0 0 900 900
aux 39 0 0 900 900# adjrange
adjrange 0 0 0 900 900 0 0
adjrange 1 0 0 900 900 0 0
adjrange 2 0 0 900 900 0 0
adjrange 3 0 0 900 900 0 0
adjrange 4 0 0 900 900 0 0
adjrange 5 0 0 900 900 0 0
adjrange 6 0 0 900 900 0 0
adjrange 7 0 0 900 900 0 0
adjrange 8 0 0 900 900 0 0
adjrange 9 0 0 900 900 0 0
adjrange 10 0 0 900 900 0 0
adjrange 11 0 0 900 900 0 0
adjrange 12 0 0 900 900 0 0
adjrange 13 0 0 900 900 0 0
adjrange 14 0 0 900 900 0 0
adjrange 15 0 0 900 900 0 0
adjrange 16 0 0 900 900 0 0
adjrange 17 0 0 900 900 0 0
adjrange 18 0 0 900 900 0 0
adjrange 19 0 0 900 900 0 0# rxrange
rxrange 0 1000 2000
rxrange 1 1000 2000
rxrange 2 1000 2000
rxrange 3 1000 2000# temp_sensor
temp_sensor 0 0 0 0 0 0
temp_sensor 1 0 0 0 0 0
temp_sensor 2 0 0 0 0 0
temp_sensor 3 0 0 0 0 0
temp_sensor 4 0 0 0 0 0
temp_sensor 5 0 0 0 0 0
temp_sensor 6 0 0 0 0 0
temp_sensor 7 0 0 0 0 0# wp
#wp 0 invalid
wp 0 0 0 0 0 0 0 0 0
wp 1 0 0 0 0 0 0 0 0
wp 2 0 0 0 0 0 0 0 0
wp 3 0 0 0 0 0 0 0 0
wp 4 0 0 0 0 0 0 0 0
wp 5 0 0 0 0 0 0 0 0
wp 6 0 0 0 0 0 0 0 0
wp 7 0 0 0 0 0 0 0 0
wp 8 0 0 0 0 0 0 0 0
wp 9 0 0 0 0 0 0 0 0
wp 10 0 0 0 0 0 0 0 0
wp 11 0 0 0 0 0 0 0 0
wp 12 0 0 0 0 0 0 0 0
wp 13 0 0 0 0 0 0 0 0
wp 14 0 0 0 0 0 0 0 0
wp 15 0 0 0 0 0 0 0 0
wp 16 0 0 0 0 0 0 0 0
wp 17 0 0 0 0 0 0 0 0
wp 18 0 0 0 0 0 0 0 0
wp 19 0 0 0 0 0 0 0 0
wp 20 0 0 0 0 0 0 0 0
wp 21 0 0 0 0 0 0 0 0
wp 22 0 0 0 0 0 0 0 0
wp 23 0 0 0 0 0 0 0 0
wp 24 0 0 0 0 0 0 0 0
wp 25 0 0 0 0 0 0 0 0
wp 26 0 0 0 0 0 0 0 0
wp 27 0 0 0 0 0 0 0 0
wp 28 0 0 0 0 0 0 0 0
wp 29 0 0 0 0 0 0 0 0
wp 30 0 0 0 0 0 0 0 0
wp 31 0 0 0 0 0 0 0 0
wp 32 0 0 0 0 0 0 0 0
wp 33 0 0 0 0 0 0 0 0
wp 34 0 0 0 0 0 0 0 0
wp 35 0 0 0 0 0 0 0 0
wp 36 0 0 0 0 0 0 0 0
wp 37 0 0 0 0 0 0 0 0
wp 38 0 0 0 0 0 0 0 0
wp 39 0 0 0 0 0 0 0 0
wp 40 0 0 0 0 0 0 0 0
wp 41 0 0 0 0 0 0 0 0
wp 42 0 0 0 0 0 0 0 0
wp 43 0 0 0 0 0 0 0 0
wp 44 0 0 0 0 0 0 0 0
wp 45 0 0 0 0 0 0 0 0
wp 46 0 0 0 0 0 0 0 0
wp 47 0 0 0 0 0 0 0 0
wp 48 0 0 0 0 0 0 0 0
wp 49 0 0 0 0 0 0 0 0
wp 50 0 0 0 0 0 0 0 0
wp 51 0 0 0 0 0 0 0 0
wp 52 0 0 0 0 0 0 0 0
wp 53 0 0 0 0 0 0 0 0
wp 54 0 0 0 0 0 0 0 0
wp 55 0 0 0 0 0 0 0 0
wp 56 0 0 0 0 0 0 0 0
wp 57 0 0 0 0 0 0 0 0
wp 58 0 0 0 0 0 0 0 0
wp 59 0 0 0 0 0 0 0 0# osd_layout
osd_layout 0 0 25 2 V
osd_layout 0 1 12 2 V
osd_layout 0 2 0 0 H
osd_layout 0 3 8 6 V
osd_layout 0 4 8 6 V
osd_layout 0 5 23 8 H
osd_layout 0 6 23 12 V
osd_layout 0 7 13 13 V
osd_layout 0 8 20 2 H
osd_layout 0 9 1 2 H
osd_layout 0 10 8 6 H
osd_layout 0 11 23 9 V
osd_layout 0 12 1 2 V
osd_layout 0 13 22 6 V
osd_layout 0 14 19 1 V
osd_layout 0 15 2 7 V
osd_layout 0 16 2 10 H
osd_layout 0 17 2 11 H
osd_layout 0 18 2 12 H
osd_layout 0 19 15 1 H
osd_layout 0 20 18 12 H
osd_layout 0 21 0 12 H
osd_layout 0 22 14 11 V
osd_layout 0 23 2 11 V
osd_layout 0 24 12 2 H
osd_layout 0 25 23 5 H
osd_layout 0 26 24 7 H
osd_layout 0 27 3 5 H
osd_layout 0 28 23 11 H
osd_layout 0 29 23 12 H
osd_layout 0 30 2 14 V
osd_layout 0 31 0 10 H
osd_layout 0 32 12 1 H
osd_layout 0 33 6 2 H
osd_layout 0 34 18 2 H
osd_layout 0 35 2 9 V
osd_layout 0 36 1 5 H
osd_layout 0 37 1 6 H
osd_layout 0 38 1 7 H
osd_layout 0 39 1 5 H
osd_layout 0 40 2 12 V
osd_layout 0 41 1 8 H
osd_layout 0 42 1 7 H
osd_layout 0 43 0 0 H
osd_layout 0 44 0 0 H
osd_layout 0 45 0 0 H
osd_layout 0 46 3 6 H
osd_layout 0 47 3 7 H
osd_layout 0 48 23 7 H
osd_layout 0 49 23 6 H
osd_layout 0 50 0 0 H
osd_layout 0 51 12 2 H
osd_layout 0 52 12 2 H
osd_layout 0 53 12 1 H
osd_layout 0 54 12 1 H
osd_layout 0 55 1 8 H
osd_layout 0 56 2 12 H
osd_layout 0 57 2 12 H
osd_layout 0 58 2 12 H
osd_layout 0 59 2 12 H
osd_layout 0 60 2 12 H
osd_layout 0 61 2 12 H
osd_layout 0 62 2 10 H
osd_layout 0 63 2 11 H
osd_layout 0 64 2 12 H
osd_layout 0 65 2 12 H
osd_layout 0 66 2 12 H
osd_layout 0 67 2 12 H
osd_layout 0 68 2 12 H
osd_layout 0 69 2 12 H
osd_layout 0 70 2 12 H
osd_layout 0 71 2 12 H
osd_layout 0 72 2 12 H
osd_layout 0 73 2 12 H
osd_layout 0 74 2 12 H
osd_layout 0 75 2 12 H
osd_layout 0 76 2 12 H
osd_layout 0 77 2 12 H
osd_layout 0 78 0 0 H
osd_layout 0 79 2 12 H
osd_layout 0 80 2 12 H
osd_layout 0 81 2 12 H
osd_layout 0 82 2 12 H
osd_layout 0 83 2 12 H
osd_layout 0 84 2 12 H
osd_layout 0 85 23 1 H
osd_layout 0 86 19 2 H
osd_layout 0 87 19 3 H
osd_layout 0 88 19 4 H
osd_layout 0 89 19 5 H
osd_layout 0 90 19 6 H
osd_layout 0 91 19 7 H
osd_layout 0 92 19 8 H
osd_layout 0 93 19 9 H
osd_layout 0 94 19 10 H
osd_layout 0 95 19 11 H
osd_layout 0 96 0 0 H
osd_layout 0 97 0 12 H
osd_layout 0 98 0 0 H
osd_layout 0 99 0 0 H
osd_layout 0 100 12 4 H
osd_layout 0 101 12 5 H
osd_layout 0 102 12 6 H
osd_layout 0 103 12 7 H
osd_layout 0 104 0 0 H
osd_layout 0 105 3 5 H
osd_layout 0 106 1 2 H
osd_layout 0 107 1 3 H
osd_layout 0 108 2 12 H
osd_layout 0 109 23 12 H
osd_layout 0 110 23 11 H
osd_layout 0 111 24 9 H
osd_layout 0 112 24 4 V
osd_layout 0 113 1 1 H
osd_layout 0 114 1 2 H
osd_layout 0 115 1 3 H
osd_layout 0 116 1 4 H
osd_layout 0 117 0 0 H
osd_layout 0 118 0 0 H
osd_layout 0 119 0 0 H
osd_layout 0 120 0 0 H
osd_layout 0 121 3 4 H
osd_layout 0 122 3 5 H
osd_layout 0 123 3 6 H
osd_layout 0 124 23 2 H
osd_layout 1 0 23 0 H
osd_layout 1 1 12 0 H
osd_layout 1 2 0 0 H
osd_layout 1 3 8 6 H
osd_layout 1 4 8 6 H
osd_layout 1 5 23 8 H
osd_layout 1 6 23 9 H
osd_layout 1 7 13 12 H
osd_layout 1 8 20 2 H
osd_layout 1 9 1 2 H
osd_layout 1 10 8 6 H
osd_layout 1 11 2 3 H
osd_layout 1 12 1 4 H
osd_layout 1 13 23 1 H
osd_layout 1 14 0 11 H
osd_layout 1 15 1 0 H
osd_layout 1 16 2 10 H
osd_layout 1 17 2 11 H
osd_layout 1 18 2 12 H
osd_layout 1 19 15 1 H
osd_layout 1 20 18 12 H
osd_layout 1 21 0 12 H
osd_layout 1 22 14 11 H
osd_layout 1 23 1 1 H
osd_layout 1 24 12 2 H
osd_layout 1 25 23 5 H
osd_layout 1 26 24 7 H
osd_layout 1 27 3 5 H
osd_layout 1 28 23 11 H
osd_layout 1 29 23 12 H
osd_layout 1 30 1 13 H
osd_layout 1 31 0 10 H
osd_layout 1 32 12 1 H
osd_layout 1 33 6 2 H
osd_layout 1 34 18 2 H
osd_layout 1 35 1 5 H
osd_layout 1 36 1 5 H
osd_layout 1 37 1 6 H
osd_layout 1 38 1 7 H
osd_layout 1 39 1 5 H
osd_layout 1 40 1 2 H
osd_layout 1 41 1 8 H
osd_layout 1 42 1 7 H
osd_layout 1 43 0 0 H
osd_layout 1 44 0 0 H
osd_layout 1 45 0 0 H
osd_layout 1 46 3 6 H
osd_layout 1 47 3 7 H
osd_layout 1 48 23 7 H
osd_layout 1 49 23 6 H
osd_layout 1 50 0 0 H
osd_layout 1 51 12 2 H
osd_layout 1 52 12 2 H
osd_layout 1 53 12 1 H
osd_layout 1 54 12 1 H
osd_layout 1 55 1 8 H
osd_layout 1 56 2 12 H
osd_layout 1 57 2 12 H
osd_layout 1 58 2 12 H
osd_layout 1 59 2 12 H
osd_layout 1 60 2 12 H
osd_layout 1 61 2 12 H
osd_layout 1 62 2 10 H
osd_layout 1 63 2 11 H
osd_layout 1 64 2 12 H
osd_layout 1 65 2 12 H
osd_layout 1 66 2 12 H
osd_layout 1 67 2 12 H
osd_layout 1 68 2 12 H
osd_layout 1 69 2 12 H
osd_layout 1 70 2 12 H
osd_layout 1 71 2 12 H
osd_layout 1 72 2 12 H
osd_layout 1 73 2 12 H
osd_layout 1 74 2 12 H
osd_layout 1 75 2 12 H
osd_layout 1 76 2 12 H
osd_layout 1 77 2 12 H
osd_layout 1 78 0 0 H
osd_layout 1 79 2 12 H
osd_layout 1 80 2 12 H
osd_layout 1 81 2 12 H
osd_layout 1 82 2 12 H
osd_layout 1 83 2 12 H
osd_layout 1 84 2 12 H
osd_layout 1 85 23 1 H
osd_layout 1 86 19 2 H
osd_layout 1 87 19 3 H
osd_layout 1 88 19 4 H
osd_layout 1 89 19 5 H
osd_layout 1 90 19 6 H
osd_layout 1 91 19 7 H
osd_layout 1 92 19 8 H
osd_layout 1 93 19 9 H
osd_layout 1 94 19 10 H
osd_layout 1 95 19 11 H
osd_layout 1 96 0 0 H
osd_layout 1 97 0 12 H
osd_layout 1 98 0 0 H
osd_layout 1 99 0 0 H
osd_layout 1 100 12 4 H
osd_layout 1 101 12 5 H
osd_layout 1 102 12 6 H
osd_layout 1 103 12 7 H
osd_layout 1 104 0 0 H
osd_layout 1 105 3 5 H
osd_layout 1 106 1 2 H
osd_layout 1 107 1 3 H
osd_layout 1 108 2 12 H
osd_layout 1 109 23 12 H
osd_layout 1 110 23 11 H
osd_layout 1 111 24 9 H
osd_layout 1 112 24 10 H
osd_layout 1 113 1 1 H
osd_layout 1 114 1 2 H
osd_layout 1 115 1 3 H
osd_layout 1 116 1 4 H
osd_layout 1 117 0 0 H
osd_layout 1 118 0 0 H
osd_layout 1 119 0 0 H
osd_layout 1 120 0 0 H
osd_layout 1 121 3 4 H
osd_layout 1 122 3 5 H
osd_layout 1 123 3 6 H
osd_layout 1 124 23 2 H
osd_layout 2 0 23 0 H
osd_layout 2 1 12 0 H
osd_layout 2 2 0 0 H
osd_layout 2 3 8 6 H
osd_layout 2 4 8 6 H
osd_layout 2 5 23 8 H
osd_layout 2 6 23 9 H
osd_layout 2 7 13 12 H
osd_layout 2 8 20 2 H
osd_layout 2 9 1 2 H
osd_layout 2 10 8 6 H
osd_layout 2 11 2 3 H
osd_layout 2 12 1 4 H
osd_layout 2 13 23 1 H
osd_layout 2 14 0 11 H
osd_layout 2 15 1 0 H
osd_layout 2 16 2 10 H
osd_layout 2 17 2 11 H
osd_layout 2 18 2 12 H
osd_layout 2 19 15 1 H
osd_layout 2 20 18 12 H
osd_layout 2 21 0 12 H
osd_layout 2 22 14 11 H
osd_layout 2 23 1 1 H
osd_layout 2 24 12 2 H
osd_layout 2 25 23 5 H
osd_layout 2 26 24 7 H
osd_layout 2 27 3 5 H
osd_layout 2 28 23 11 H
osd_layout 2 29 23 12 H
osd_layout 2 30 1 13 H
osd_layout 2 31 0 10 H
osd_layout 2 32 12 1 H
osd_layout 2 33 6 2 H
osd_layout 2 34 18 2 H
osd_layout 2 35 1 5 H
osd_layout 2 36 1 5 H
osd_layout 2 37 1 6 H
osd_layout 2 38 1 7 H
osd_layout 2 39 1 5 H
osd_layout 2 40 1 2 H
osd_layout 2 41 1 8 H
osd_layout 2 42 1 7 H
osd_layout 2 43 0 0 H
osd_layout 2 44 0 0 H
osd_layout 2 45 0 0 H
osd_layout 2 46 3 6 H
osd_layout 2 47 3 7 H
osd_layout 2 48 23 7 H
osd_layout 2 49 23 6 H
osd_layout 2 50 0 0 H
osd_layout 2 51 12 2 H
osd_layout 2 52 12 2 H
osd_layout 2 53 12 1 H
osd_layout 2 54 12 1 H
osd_layout 2 55 1 8 H
osd_layout 2 56 2 12 H
osd_layout 2 57 2 12 H
osd_layout 2 58 2 12 H
osd_layout 2 59 2 12 H
osd_layout 2 60 2 12 H
osd_layout 2 61 2 12 H
osd_layout 2 62 2 10 H
osd_layout 2 63 2 11 H
osd_layout 2 64 2 12 H
osd_layout 2 65 2 12 H
osd_layout 2 66 2 12 H
osd_layout 2 67 2 12 H
osd_layout 2 68 2 12 H
osd_layout 2 69 2 12 H
osd_layout 2 70 2 12 H
osd_layout 2 71 2 12 H
osd_layout 2 72 2 12 H
osd_layout 2 73 2 12 H
osd_layout 2 74 2 12 H
osd_layout 2 75 2 12 H
osd_layout 2 76 2 12 H
osd_layout 2 77 2 12 H
osd_layout 2 78 0 0 H
osd_layout 2 79 2 12 H
osd_layout 2 80 2 12 H
osd_layout 2 81 2 12 H
osd_layout 2 82 2 12 H
osd_layout 2 83 2 12 H
osd_layout 2 84 2 12 H
osd_layout 2 85 23 1 H
osd_layout 2 86 19 2 H
osd_layout 2 87 19 3 H
osd_layout 2 88 19 4 H
osd_layout 2 89 19 5 H
osd_layout 2 90 19 6 H
osd_layout 2 91 19 7 H
osd_layout 2 92 19 8 H
osd_layout 2 93 19 9 H
osd_layout 2 94 19 10 H
osd_layout 2 95 19 11 H
osd_layout 2 96 0 0 H
osd_layout 2 97 0 12 H
osd_layout 2 98 0 0 H
osd_layout 2 99 0 0 H
osd_layout 2 100 12 4 H
osd_layout 2 101 12 5 H
osd_layout 2 102 12 6 H
osd_layout 2 103 12 7 H
osd_layout 2 104 0 0 H
osd_layout 2 105 3 5 H
osd_layout 2 106 1 2 H
osd_layout 2 107 1 3 H
osd_layout 2 108 2 12 H
osd_layout 2 109 23 12 H
osd_layout 2 110 23 11 H
osd_layout 2 111 24 9 H
osd_layout 2 112 24 10 H
osd_layout 2 113 1 1 H
osd_layout 2 114 1 2 H
osd_layout 2 115 1 3 H
osd_layout 2 116 1 4 H
osd_layout 2 117 0 0 H
osd_layout 2 118 0 0 H
osd_layout 2 119 0 0 H
osd_layout 2 120 0 0 H
osd_layout 2 121 3 4 H
osd_layout 2 122 3 5 H
osd_layout 2 123 3 6 H
osd_layout 2 124 23 2 H
osd_layout 3 0 23 0 H
osd_layout 3 1 12 0 H
osd_layout 3 2 0 0 H
osd_layout 3 3 8 6 H
osd_layout 3 4 8 6 H
osd_layout 3 5 23 8 H
osd_layout 3 6 23 9 H
osd_layout 3 7 13 12 H
osd_layout 3 8 20 2 H
osd_layout 3 9 1 2 H
osd_layout 3 10 8 6 H
osd_layout 3 11 2 3 H
osd_layout 3 12 1 4 H
osd_layout 3 13 23 1 H
osd_layout 3 14 0 11 H
osd_layout 3 15 1 0 H
osd_layout 3 16 2 10 H
osd_layout 3 17 2 11 H
osd_layout 3 18 2 12 H
osd_layout 3 19 15 1 H
osd_layout 3 20 18 12 H
osd_layout 3 21 0 12 H
osd_layout 3 22 14 11 H
osd_layout 3 23 1 1 H
osd_layout 3 24 12 2 H
osd_layout 3 25 23 5 H
osd_layout 3 26 24 7 H
osd_layout 3 27 3 5 H
osd_layout 3 28 23 11 H
osd_layout 3 29 23 12 H
osd_layout 3 30 1 13 H
osd_layout 3 31 0 10 H
osd_layout 3 32 12 1 H
osd_layout 3 33 6 2 H
osd_layout 3 34 18 2 H
osd_layout 3 35 1 5 H
osd_layout 3 36 1 5 H
osd_layout 3 37 1 6 H
osd_layout 3 38 1 7 H
osd_layout 3 39 1 5 H
osd_layout 3 40 1 2 H
osd_layout 3 41 1 8 H
osd_layout 3 42 1 7 H
osd_layout 3 43 0 0 H
osd_layout 3 44 0 0 H
osd_layout 3 45 0 0 H
osd_layout 3 46 3 6 H
osd_layout 3 47 3 7 H
osd_layout 3 48 23 7 H
osd_layout 3 49 23 6 H
osd_layout 3 50 0 0 H
osd_layout 3 51 12 2 H
osd_layout 3 52 12 2 H
osd_layout 3 53 12 1 H
osd_layout 3 54 12 1 H
osd_layout 3 55 1 8 H
osd_layout 3 56 2 12 H
osd_layout 3 57 2 12 H
osd_layout 3 58 2 12 H
osd_layout 3 59 2 12 H
osd_layout 3 60 2 12 H
osd_layout 3 61 2 12 H
osd_layout 3 62 2 10 H
osd_layout 3 63 2 11 H
osd_layout 3 64 2 12 H
osd_layout 3 65 2 12 H
osd_layout 3 66 2 12 H
osd_layout 3 67 2 12 H
osd_layout 3 68 2 12 H
osd_layout 3 69 2 12 H
osd_layout 3 70 2 12 H
osd_layout 3 71 2 12 H
osd_layout 3 72 2 12 H
osd_layout 3 73 2 12 H
osd_layout 3 74 2 12 H
osd_layout 3 75 2 12 H
osd_layout 3 76 2 12 H
osd_layout 3 77 2 12 H
osd_layout 3 78 0 0 H
osd_layout 3 79 2 12 H
osd_layout 3 80 2 12 H
osd_layout 3 81 2 12 H
osd_layout 3 82 2 12 H
osd_layout 3 83 2 12 H
osd_layout 3 84 2 12 H
osd_layout 3 85 23 1 H
osd_layout 3 86 19 2 H
osd_layout 3 87 19 3 H
osd_layout 3 88 19 4 H
osd_layout 3 89 19 5 H
osd_layout 3 90 19 6 H
osd_layout 3 91 19 7 H
osd_layout 3 92 19 8 H
osd_layout 3 93 19 9 H
osd_layout 3 94 19 10 H
osd_layout 3 95 19 11 H
osd_layout 3 96 0 0 H
osd_layout 3 97 0 12 H
osd_layout 3 98 0 0 H
osd_layout 3 99 0 0 H
osd_layout 3 100 12 4 H
osd_layout 3 101 12 5 H
osd_layout 3 102 12 6 H
osd_layout 3 103 12 7 H
osd_layout 3 104 0 0 H
osd_layout 3 105 3 5 H
osd_layout 3 106 1 2 H
osd_layout 3 107 1 3 H
osd_layout 3 108 2 12 H
osd_layout 3 109 23 12 H
osd_layout 3 110 23 11 H
osd_layout 3 111 24 9 H
osd_layout 3 112 24 10 H
osd_layout 3 113 1 1 H
osd_layout 3 114 1 2 H
osd_layout 3 115 1 3 H
osd_layout 3 116 1 4 H
osd_layout 3 117 0 0 H
osd_layout 3 118 0 0 H
osd_layout 3 119 0 0 H
osd_layout 3 120 0 0 H
osd_layout 3 121 3 4 H
osd_layout 3 122 3 5 H
osd_layout 3 123 3 6 H
osd_layout 3 124 23 2 H# master
set looptime = 1000
set align_gyro = DEFAULT
set gyro_hardware_lpf = 256HZ
set gyro_anti_aliasing_lpf_hz = 250
set gyro_anti_aliasing_lpf_type = PT1
set moron_threshold = 32
set gyro_notch_hz = 0
set gyro_notch_cutoff = 1
set gyro_main_lpf_hz = 25
set gyro_main_lpf_type = BIQUAD
set gyro_use_dyn_lpf = OFF
set gyro_dyn_lpf_min_hz = 200
set gyro_dyn_lpf_max_hz = 500
set gyro_dyn_lpf_curve_expo = 5
set dynamic_gyro_notch_enabled = ON
set dynamic_gyro_notch_range = MEDIUM
set dynamic_gyro_notch_q = 250
set dynamic_gyro_notch_min_hz = 30
set gyro_abg_alpha = 0.000
set gyro_abg_boost = 0.350
set gyro_abg_half_life = 0.500
set vbat_adc_channel = 1
set rssi_adc_channel = 3
set current_adc_channel = 2
set airspeed_adc_channel = 4
set acc_notch_hz = 0
set acc_notch_cutoff = 1
set align_acc = DEFAULT
set acc_hardware = MPU6000
set acc_lpf_hz = 15
set acc_lpf_type = BIQUAD
set acczero_x = 22
set acczero_y = -13
set acczero_z = -255
set accgain_x = 4091
set accgain_y = 4110
set accgain_z = 4052
set rangefinder_hardware = NONE
set rangefinder_median_filter = OFF
set opflow_hardware = NONE
set opflow_scale = 10.500
set align_opflow = CW0FLIP
set imu2_hardware = NONE
set imu2_use_for_osd_heading = OFF
set imu2_use_for_osd_ahi = OFF
set imu2_use_for_stabilized = OFF
set imu2_align_roll = 0
set imu2_align_pitch = 0
set imu2_align_yaw = 0
set imu2_gain_acc_x = 0
set imu2_gain_acc_y = 0
set imu2_gain_acc_z = 0
set imu2_gain_mag_x = 0
set imu2_gain_mag_y = 0
set imu2_gain_mag_z = 0
set imu2_radius_acc = 0
set imu2_radius_mag = 0
set align_mag = CW270FLIP
set mag_hardware = NONE
set mag_declination = 0
set magzero_x = 0
set magzero_y = 0
set magzero_z = 0
set maggain_x = 1024
set maggain_y = 1024
set maggain_z = 1024
set mag_calibration_time = 30
set align_mag_roll = 0
set align_mag_pitch = 0
set align_mag_yaw = 0
set baro_hardware = BMP280
set baro_median_filter = ON
set baro_cal_tolerance = 150
set pitot_hardware = NONE
set pitot_lpf_milli_hz = 350
set pitot_scale = 1.000
set receiver_type = SERIAL
set min_check = 1100
set max_check = 1900
set rssi_source = AUTO
set rssi_channel = 12
set rssi_min = 0
set rssi_max = 100
set sbus_sync_interval = 3000
set rc_filter_frequency = 50
set serialrx_provider = CRSF
set serialrx_inverted = OFF
set spektrum_sat_bind = 0
set srxl2_unit_id = 1
set srxl2_baud_fast = ON
set rx_min_usec = 885
set rx_max_usec = 2115
set serialrx_halfduplex = AUTO
set blackbox_rate_num = 1
set blackbox_rate_denom = 1
set blackbox_device = SERIAL
set max_throttle = 1850
set min_command = 1000
set motor_pwm_rate = 400
set motor_accel_time = 0
set motor_decel_time = 0
set motor_pwm_protocol = STANDARD
set throttle_scale = 1.000
set throttle_idle = 5.000
set motor_poles = 14
set turtle_mode_power_factor = 55
set failsafe_delay = 5
set failsafe_recovery_delay = 5
set failsafe_off_delay = 200
set failsafe_throttle = 1000
set failsafe_throttle_low_delay = 0
set failsafe_procedure = RTH
set failsafe_stick_threshold = 50
set failsafe_fw_roll_angle = -200
set failsafe_fw_pitch_angle = 100
set failsafe_fw_yaw_rate = -45
set failsafe_min_distance = 0
set failsafe_min_distance_procedure = DROP
set failsafe_mission = ON
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 0
set vbat_meter_type = ADC
set vbat_scale = 1100
set current_meter_scale = 400
set current_meter_offset = 0
set current_meter_type = ADC
set bat_voltage_src = RAW
set cruise_power = 0
set idle_power = 0
set rth_energy_margin = 5
set thr_comp_weight = 1.000
set motor_direction_inverted = OFF
set platform_type = AIRPLANE
set has_flaps = OFF
set model_preview_type = 8
set fw_min_throttle_down_pitch = 0
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set servo_protocol = PWM
set servo_center_pulse = 1500
set servo_pwm_rate = 50
set servo_lpf_hz = 20
set flaperon_throw_offset = 200
set tri_unarmed_servo = ON
set servo_autotrim_rotation_limit = 15
set reboot_character = 82
set imu_dcm_kp = 2500
set imu_dcm_ki = 50
set imu_dcm_kp_mag = 10000
set imu_dcm_ki_mag = 0
set small_angle = 180
set imu_acc_ignore_rate = 10
set imu_acc_ignore_slope = 0
set fixed_wing_auto_arm = OFF
set disarm_kill_switch = ON
set switch_disarm_delay = 250
set prearm_timeout = 10000
set applied_defaults = 3
set rpm_gyro_filter_enabled = OFF
set rpm_gyro_harmonics = 1
set rpm_gyro_min_hz = 100
set rpm_gyro_q = 500
set gps_provider = UBLOX
set gps_sbas_mode = AUTO
set gps_dyn_model = AIR_1G
set gps_auto_config = ON
set gps_auto_baud = ON
set gps_ublox_use_galileo = ON
set gps_min_sats = 6
set deadband = 5
set yaw_deadband = 5
set pos_hold_deadband = 10
set control_deadband = 10
set alt_hold_deadband = 50
set 3d_deadband_throttle = 50
set airmode_type = STICK_CENTER_ONCE
set airmode_throttle_threshold = 1300
set fw_autotune_min_stick = 50
set fw_autotune_ff_to_p_gain = 10
set fw_autotune_p_to_d_gain = 0
set fw_autotune_ff_to_i_tc = 600
set fw_autotune_rate_adjustment = AUTO
set fw_autotune_max_rate_deflection = 90
set inav_auto_mag_decl = ON
set inav_gravity_cal_tolerance = 5
set inav_use_gps_velned = ON
set inav_use_gps_no_baro = OFF
set inav_allow_dead_reckoning = OFF
set inav_reset_altitude = FIRST_ARM
set inav_reset_home = FIRST_ARM
set inav_max_surface_altitude = 200
set inav_w_z_surface_p = 3.500
set inav_w_z_surface_v = 6.100
set inav_w_xy_flow_p = 1.000
set inav_w_xy_flow_v = 2.000
set inav_w_z_baro_p = 0.350
set inav_w_z_gps_p = 0.200
set inav_w_z_gps_v = 0.100
set inav_w_xy_gps_p = 1.000
set inav_w_xy_gps_v = 2.000
set inav_w_z_res_v = 0.500
set inav_w_xy_res_v = 0.500
set inav_w_xyz_acc_p = 1.000
set inav_w_acc_bias = 0.010
set inav_max_eph_epv = 1000.000
set inav_baro_epv = 100.000
set nav_disarm_on_landing = OFF
set nav_use_midthr_for_althold = OFF
set nav_extra_arming_safety = ON
set nav_user_control_mode = ATTI
set nav_position_timeout = 5
set nav_wp_load_on_boot = OFF
set nav_wp_radius = 1500
set nav_wp_safe_distance = 10000
set nav_auto_speed = 300
set nav_auto_climb_rate = 500
set nav_manual_speed = 500
set nav_manual_climb_rate = 200
set nav_land_minalt_vspd = 50
set nav_land_maxalt_vspd = 200
set nav_land_slowdown_minalt = 500
set nav_land_slowdown_maxalt = 2000
set nav_emerg_landing_speed = 500
set nav_min_rth_distance = 500
set nav_overrides_motor_stop = ALL_NAV
set nav_rth_climb_first = ON
set nav_rth_climb_ignore_emerg = OFF
set nav_rth_tail_first = OFF
set nav_rth_allow_landing = FS_ONLY
set nav_rth_alt_mode = AT_LEAST
set nav_rth_alt_control_override = OFF
set nav_rth_abort_threshold = 50000
set nav_max_terrain_follow_alt = 100
set nav_max_altitude = 0
set nav_rth_altitude = 8000
set nav_rth_home_altitude = 0
set safehome_max_distance = 20000
set safehome_usage_mode = RTH
set nav_mc_bank_angle = 30
set nav_mc_hover_thr = 1500
set nav_mc_auto_disarm_delay = 2000
set nav_mc_braking_speed_threshold = 100
set nav_mc_braking_disengage_speed = 75
set nav_mc_braking_timeout = 2000
set nav_mc_braking_boost_factor = 100
set nav_mc_braking_boost_timeout = 750
set nav_mc_braking_boost_speed_threshold = 150
set nav_mc_braking_boost_disengage_speed = 100
set nav_mc_braking_bank_angle = 40
set nav_mc_pos_deceleration_time = 120
set nav_mc_pos_expo = 10
set nav_mc_wp_slowdown = ON
set nav_fw_cruise_thr = 1500
set nav_fw_min_thr = 1200
set nav_fw_max_thr = 1700
set nav_fw_bank_angle = 45
set nav_fw_climb_angle = 20
set nav_fw_dive_angle = 15
set nav_fw_pitch2thr = 10
set nav_fw_pitch2thr_smoothing = 6
set nav_fw_pitch2thr_threshold = 50
set nav_fw_loiter_radius = 15000
set nav_fw_cruise_speed = 0
set nav_fw_control_smoothness = 2
set nav_fw_land_dive_angle = 2
set nav_fw_launch_velocity = 300
set nav_fw_launch_accel = 1500
set nav_fw_launch_max_angle = 45
set nav_fw_launch_detect_time = 40
set nav_fw_launch_thr = 1700
set nav_fw_launch_idle_thr = 1000
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 120
set nav_fw_launch_spinup_time = 30
set nav_fw_launch_end_time = 3000
set nav_fw_launch_min_time = 0
set nav_fw_launch_timeout = 20000
set nav_fw_launch_max_altitude = 0
set nav_fw_launch_climb_angle = 12
set nav_fw_cruise_yaw_rate = 20
set nav_fw_allow_manual_thr_increase = OFF
set nav_use_fw_yaw_control = OFF
set nav_fw_yaw_deadband = 0
set telemetry_switch = OFF
set telemetry_inverted = OFF
set frsky_default_latitude = 0.000
set frsky_default_longitude = 0.000
set frsky_coordinates_format = 0
set frsky_unit = METRIC
set frsky_vfas_precision = 0
set frsky_pitch_roll = OFF
set report_cell_voltage = OFF
set hott_alarm_sound_interval = 5
set telemetry_halfduplex = ON
set smartport_fuel_unit = MAH
set ibus_telemetry_type = 0
set ltm_update_rate = NORMAL
set sim_ground_station_number =
set sim_pin = 0000
set sim_transmit_interval = 60
set sim_transmit_flags = 2
set acc_event_threshold_high = 0
set acc_event_threshold_low = 0
set acc_event_threshold_neg_x = 0
set sim_low_altitude = -32767
set mavlink_ext_status_rate = 2
set mavlink_rc_chan_rate = 5
set mavlink_pos_rate = 2
set mavlink_extra1_rate = 10
set mavlink_extra2_rate = 2
set mavlink_extra3_rate = 1
set mavlink_version = 2
set ledstrip_visual_beeper = OFF
set osd_telemetry = OFF
set osd_video_system = AUTO
set osd_row_shiftdown = 0
set osd_units = METRIC
set osd_stats_energy_unit = MAH
set osd_stats_min_voltage_unit = BATTERY
set osd_rssi_alarm = 20
set osd_time_alarm = 30
set osd_alt_alarm = 120
set osd_dist_alarm = 10000
set osd_neg_alt_alarm = 5
set osd_current_alarm = 0
set osd_gforce_alarm = 5.000
set osd_gforce_axis_alarm_min = -5.000
set osd_gforce_axis_alarm_max = 5.000
set osd_imu_temp_alarm_min = -200
set osd_imu_temp_alarm_max = 600
set osd_esc_temp_alarm_max = 900
set osd_esc_temp_alarm_min = -200
set osd_baro_temp_alarm_min = -200
set osd_baro_temp_alarm_max = 600
set osd_snr_alarm = 4
set osd_link_quality_alarm = 50
set osd_rssi_dbm_alarm = 0
set osd_temp_label_align = LEFT
set osd_ahi_reverse_roll = OFF
set osd_ahi_max_pitch = 20
set osd_crosshairs_style = DEFAULT
set osd_crsf_lq_format = TYPE1
set osd_horizon_offset = 0
set osd_camera_uptilt = 0
set osd_ahi_camera_uptilt_comp = OFF
set osd_camera_fov_h = 135
set osd_camera_fov_v = 85
set osd_hud_margin_h = 3
set osd_hud_margin_v = 3
set osd_hud_homing = OFF
set osd_hud_homepoint = OFF
set osd_hud_radar_disp = 0
set osd_hud_radar_range_min = 3
set osd_hud_radar_range_max = 4000
set osd_hud_radar_nearest = 0
set osd_hud_wp_disp = 0
set osd_left_sidebar_scroll = NONE
set osd_right_sidebar_scroll = NONE
set osd_sidebar_scroll_arrows = OFF
set osd_main_voltage_decimals = 1
set osd_coordinate_digits = 9
set osd_estimations_wind_compensation = ON
set osd_failsafe_switch_layout = OFF
set osd_plus_code_digits = 11
set osd_plus_code_short = 0
set osd_ahi_style = DEFAULT
set osd_force_grid = OFF
set osd_ahi_bordered = OFF
set osd_ahi_width = 132
set osd_ahi_height = 162
set osd_ahi_vertical_offset = -18
set osd_sidebar_horizontal_offset = 0
set osd_left_sidebar_scroll_step = 0
set osd_right_sidebar_scroll_step = 0
set osd_sidebar_height = 3
set osd_home_position_arm_screen = ON
set osd_pan_servo_index = 0
set osd_pan_servo_pwm2centideg = 0
set osd_speed_source = GROUND
set i2c_speed = 400KHZ
set debug_mode = NONE
set throttle_tilt_comp_str = 0
set name =
set mode_range_logic_operator = OR
set stats = OFF
set stats_total_time = 0
set stats_total_dist = 0
set stats_total_energy = 0
set tz_offset = 0
set tz_automatic_dst = OFF
set display_force_sw_blink = OFF
set vtx_halfduplex = ON
set vtx_smartaudio_early_akk_workaround = ON
set vtx_band = 4
set vtx_channel = 1
set vtx_power = 1
set vtx_low_power_disarm = OFF
set vtx_pit_mode_chan = 1
set vtx_max_power_override = 0
set pinio_box1 = 47
set pinio_box2 = 255
set pinio_box3 = 255
set pinio_box4 = 255
set log_level = ERROR
set log_topics = 0
set esc_sensor_listen_only = OFF
set smartport_master_halfduplex = ON
set smartport_master_inverted = OFF
set dji_workarounds = 1
set dji_use_name_for_messages = ON
set dji_esc_temp_source = ESC
set dshot_beeper_enabled = ON
set dshot_beeper_tone = 1
set limit_cont_current = 0
set limit_burst_current = 0
set limit_burst_current_time = 0
set limit_burst_current_falldown_time = 0
set limit_cont_power = 0
set limit_burst_power = 0
set limit_burst_power_time = 0
set limit_burst_power_falldown_time = 0
set limit_pi_p = 100
set limit_pi_i = 100
set limit_attn_filter_cutoff = 1.200# profile
profile 1set mc_p_pitch = 40
set mc_i_pitch = 30
set mc_d_pitch = 23
set mc_cd_pitch = 60
set mc_p_roll = 40
set mc_i_roll = 30
set mc_d_roll = 23
set mc_cd_roll = 60
set mc_p_yaw = 85
set mc_i_yaw = 45
set mc_d_yaw = 0
set mc_cd_yaw = 60
set mc_p_level = 20
set mc_i_level = 15
set mc_d_level = 75
set fw_p_pitch = 10
set fw_i_pitch = 22
set fw_d_pitch = 0
set fw_ff_pitch = 103
set fw_p_roll = 8
set fw_i_roll = 17
set fw_d_roll = 0
set fw_ff_roll = 77
set fw_p_yaw = 20
set fw_i_yaw = 5
set fw_d_yaw = 0
set fw_ff_yaw = 100
set fw_p_level = 20
set fw_i_level = 5
set fw_d_level = 75
set max_angle_inclination_rll = 450
set max_angle_inclination_pit = 300
set dterm_lpf_hz = 40
set dterm_lpf_type = BIQUAD
set dterm_lpf2_hz = 0
set dterm_lpf2_type = BIQUAD
set yaw_lpf_hz = 0
set fw_iterm_throw_limit = 165
set fw_loiter_direction = RIGHT
set fw_reference_airspeed = 1500.000
set fw_turn_assist_yaw_gain = 1.000
set fw_turn_assist_pitch_gain = 0.200
set fw_iterm_limit_stick_position = 0.500
set fw_yaw_iterm_freeze_bank_angle = 0
set pidsum_limit = 500
set pidsum_limit_yaw = 350
set iterm_windup = 50
set rate_accel_limit_roll_pitch = 0
set rate_accel_limit_yaw = 10000
set heading_hold_rate_limit = 90
set nav_mc_pos_z_p = 50
set nav_mc_vel_z_p = 100
set nav_mc_vel_z_i = 50
set nav_mc_vel_z_d = 10
set nav_mc_pos_xy_p = 65
set nav_mc_vel_xy_p = 40
set nav_mc_vel_xy_i = 15
set nav_mc_vel_xy_d = 100
set nav_mc_vel_xy_ff = 40
set nav_mc_heading_p = 60
set nav_mc_vel_xy_dterm_lpf_hz = 2.000
set nav_mc_vel_xy_dterm_attenuation = 90
set nav_mc_vel_xy_dterm_attenuation_start = 10
set nav_mc_vel_xy_dterm_attenuation_end = 60
set nav_fw_pos_z_p = 20
set nav_fw_pos_z_i = 5
set nav_fw_pos_z_d = 5
set nav_fw_pos_xy_p = 50
set nav_fw_pos_xy_i = 5
set nav_fw_pos_xy_d = 8
set nav_fw_heading_p = 60
set nav_fw_pos_hdg_p = 30
set nav_fw_pos_hdg_i = 2
set nav_fw_pos_hdg_d = 0
set nav_fw_pos_hdg_pidsum_limit = 350
set mc_iterm_relax = RP
set mc_iterm_relax_cutoff = 15
set d_boost_factor = 1.000
set d_boost_max_at_acceleration = 7500.000
set d_boost_gyro_delta_lpf_hz = 80
set antigravity_gain = 1.000
set antigravity_accelerator = 1.000
set antigravity_cutoff_lpf_hz = 15
set pid_type = AUTO
set mc_cd_lpf_hz = 30
set setpoint_kalman_enabled = OFF
set setpoint_kalman_q = 100
set setpoint_kalman_w = 4
set setpoint_kalman_sharpness = 100
set fw_level_pitch_trim = 2.300
set smith_predictor_strength = 0.500
set smith_predictor_delay = 0.000
set smith_predictor_lpf_hz = 50
set fw_level_pitch_gain = 5.000
set thr_mid = 50
set thr_expo = 0
set tpa_rate = 0
set tpa_breakpoint = 1500
set fw_tpa_time_constant = 0
set rc_expo = 30
set rc_yaw_expo = 30
set roll_rate = 18
set pitch_rate = 13
set yaw_rate = 3
set manual_rc_expo = 70
set manual_rc_yaw_expo = 20
set manual_roll_rate = 100
set manual_pitch_rate = 100
set manual_yaw_rate = 100
set fpv_mix_degrees = 0# battery_profile
battery_profile 1set bat_cells = 4
set vbat_cell_detect_voltage = 415
set vbat_max_cell_voltage = 410
set vbat_min_cell_voltage = 320
set vbat_warning_cell_voltage = 330
set battery_capacity = 3000
set battery_capacity_warning = 900
set battery_capacity_critical = 600
set battery_capacity_unit = MAH# end the command batch
batch end
-
Nie wiem dokladnie jaki to silnik (inrunner?) ale przy 2S, smiglo 10x5 juz moze byc za duze..?
-
Bez jakiegos liczenia, cos w rodzaju 6x4, 7x3 z lipo 3S na poczatek testow...
-
W zeszlym tygodniu mial sie odbyc i w pewnym sensie odbyl sie pierwszy powazny test platformy. Celem bylo sprawdzenia autonomii modelu i ewentualna kalibracja sensora poboru pradu.
Niestety nie wszystko poszlo jak mialo... Na poczatku odmowil posluszenstwa barometr, albo nowy soft ze starym hardwarem nie zadzialal?
Moj plan, zeby model sobie latal po zaprogramowanym okregu az do wyczerpania baerii sie nie udal. Podlaczylem gogle, ale wypuscilem vlos. Wyprowadzilem na odpowiednia wysokosc i wlaczylem odpowiedni tryb lotu. Pewny, ze wszystko OK zaczelem grzebac w gratach. Nagle zorietowalem sie, ze nie slysze silnika. Patrze w gogle, ze model sie wzbil za wysoko chociaz na OSD mam 0 czy -1 m wysokosci.
Wrocilem recznie nad plyte, zrobilem kilka kolek, a tu znowu pani w radio krzyczy, ze bateria slaba. Juz tak mialem, wiec nie spanikowalem. Zrobilem jeszcze kilka przelotow i nagle radio zgaslo. Samolot chyba wlaczyl sie w fail safe i zaczal szybowac w kukurydze... Nie wiem jak (to sie dzialo tak szybko cha cha) ale w ostatniej chwili odzyskalem stery. Chcialem wlaczyc motor, zeby wrocic ale tylko zabrzeczal i musialem ladowac w polu. Na szczescie tuz przed kukurydza. Niestety w polowie lotu wylaczylem DVR i ciezko bedzie zrbic analize...
Pod spodem krotki filmik ze zdarzenia. Pierwsza czesc to DVR ze startu. Z lewej strony, gdzies po srodku jest odczyt wysokosci. Mozna zobaczyc, ze cos sie skopalo.
Druga czesc to ladowanie nagrane w HD, kamera bez filtra, na ustawieniach fabrycznych. Na filmie widac jak przy ostatnim nawrocie silnik bzyknal i model sie chyba przelaczyl w fail safe. Pozniej jak odzyskalem stery, slychac, ze probowalem wlaczyc silnik, ale skonczylo sie tylko bzyknieciem...
ps: co zrobic, zeby YT nie obcinalo jakosci
Tutaj model z nowa kamera Caddx Tarsier V2. Troche to wyglada jakbym mial tym latac w kosmosie, ale to jest kamera raczej przystosowana do zabudowy w stacku quada i nie mialem innego pomyslu jak ja zaczepic. Do tego strasznie sie grzeje, dlatego na razie zrezygnowalem z aerodynamicznej owiewki.
A tu filmik:
-
Bo to moze pod wycinke drutem..? Czy do recznej obrobki?
Nie wiem czy w Polsce sa w ofercie, ale z najcienszych 20 mm mialem pozytywne doswiadczenia z plytami Ursa (zolte) i Austrotherm (rozowe). Jest jeszcze wdzieczny w obrobce papierem sciernym Jackodur (fioletowy) i oryginalny, troche gumowaty Styrodur (groszkowy); ale te ostatnie wystepuja od 30 mm.




Jakiej muzyki teraz słuchasz ?
w Hyde Park
Opublikowano
Heavy Metal World - pierwszy vinyl, jaki w zyciu kupilem...