





maxiiii
-
Postów
2 058 -
Rejestracja
-
Wygrane w rankingu
9
Odpowiedzi opublikowane przez maxiiii
-
-
Każdy pin na wyjściu może być zdefiniowany prawie na dowolny sposób jako dowolny kanał, przełącznik wyjście analogowe i jeszcze kilka innych których nawet nie znam:)
-
Napisałem odbiornik i jest to prawidłowy wpis.
Odbiorniki też mogą być nadajnikami i odwrotnie.
 Do odbiornika dodajemy tylko buzer i switcha do bindowania lub jak w oprogramowaniu podamy kod bindowania to nie będzie potrzebny ani buzzer ani switch.
Do odbiornika dodajemy tylko buzer i switcha do bindowania lub jak w oprogramowaniu podamy kod bindowania to nie będzie potrzebny ani buzzer ani switch.Schemat podałem do 100mw i też jest prawidłowy a jak zmienimy moduł na 1W to już nie będzie 100mW a tylko 1wat.
dzięki , ale coś mi się nie zgadza
1.nie ma buzzera i przycisku bindowania
2.ostatnie twoje zdanie powinno brzmieć raczej :
Na zdjęciu pokazałem
odbiorniknadajnik 1W w porównaniu wielkością do odbiornika 2,4GHz.a na schemacie jest i tak 100mW
3.na zdjęciu w lewym górnym rogu mamy wyprowadzenia PWM opisane, tylko że nie potrafię zlokalizować padów na arduino
A4, A5 dla sygnału PWM 2 i 4
pwm 1 - 9
pwm 2 - A4
pwm 3 - 3
pwm 4 - A5
pwm 5 - A0
pwm 6 - A1
sd0 i sdI to są te dodatkowe 2 wejścia ? na potencjometry od gimbala ?
Nie myl aparatury z linkiem.
A4 i A5 to te 2 dodatkowe pady. W tym przypadku nieopisane ale ze względu na różnorodność arduino pro mini mogą występować w różnych miejscach.
-
Kondensator jest podłączony tylko zapobiegawczo. Ze względu na różne rodzaje i jakość zasilania ma za zadanie obcinać szpilki i podtrzymywać zasilanie na odpowiednim poziomie w przypadku krótkotrwałego obniżenia napięcia.
poniżej zamieszczam schemat i opis dodatkowych podłączeń wyjść. W tym przypadku może być ich osiem.
Odbiornik z modułem rfm23bp o mocy 1W podłącza się identycznie. jak z z innymi, wyjścia są takie same i kompatybilne. Różnią się tylko napięciem zasilania. (3,6V i 6V)
Na zdjęciu pokazałem odbiornik 1W w porównaniu wielkością do odbiornika 2,4GHz.
-
Ty to umiesz pocieszyć.
A tak liczyłem na kogoś kto zna programowanie w arduino:(Sam zająłem się nauką programowania i chciałem sam zrobić moduł dzwiękowy ale po dwóch tygodniach odpuściłem. Chyba jestem już za stary:)
A jeżeli chodzi o twój punkt "6" to już taki robiłem.
http://rc-fpv.pl/viewtopic.php?f=10&t=38852&hilit=+lrs
Ale mnie zjedli:)
Na tym scalaku można mieć 10W na 433mhz , do Moskwy i s powrotem:)
-
-
To też 8 bitów.
-
A nie prościej przeczytać instrukcję
-
ZTW to też tania chińszczyzna i wsadzają takie tranzystory jakie podejdą "QC" stoi pod znakiem zapytania. Niby mają 600hz a w rzeczywistości nie mają nawet 490.
Po prostu do wymiany tranzystory a taniej to chyba cały regulator:(
-
Tyle, że mnie nie interesuje to gdzie kupiłeś tylko jaki ma sterownik.
Ale czytając twoje posty podejrzewam, że jest to alexmos
Rozwiązanie problemu:
W GUI zmień "częstotliwość PWM" na "HIGHT (silent).
A wystarczy przeczytać instrukcję.
-
Tego typu system już mam. Kosztuje ok 50$.
Chodzi o proste vario za 5 $. czujnik plus arduino plus program.
Jerzy właśnie takie rzeczy robi "micro i fajno"
Ale vario napisałem na drugim miejscu. Wszystko to jako przykłady. Takich gagetów dla modelarzy jest mnóstwo.
-
Budowa prostego gimbala mija się z celem przy czymś takim:
A to storm nie ma alarmu napięcia?
-
Zauważyłem, że jesteś naszym forumowym elektronikiem wynalazcą i na twoje ręce składam propozycję abyś trochę rozszerzył swoje zainteresowania o dodatkowe gagety dla modelarzy.
Pierwsze o czy pomyślałem to:
1. moduł dźwiękowy do samolotów (podobny do Ryśkowego kutra)
2. wariometr
Co ty na to . Oczywiście to tylko propozycja.
-
A sterownik to....?
A tak przy okazji
czy ty kupujesz ten sprzęt z likwidowanego serwisu? -
Jaki masz kontroler lotu?
W wieku 16 lat już się nie robi takich błędów:)
"alt hold", a nawet "loiter", jednak kompletnie nie wiem jak je załączyć oraz zaprogramować.
Tak samo jak stabilize.
Pełna instrukcja dla laików po angielsku:
http://ardupilot.org/copter/index.html
skrót po polsku:
http://pfmrc.eu/index.php/topic/67690-instalacja-i-konfiguracja-apm-do-pierwszego-startu-copter/
-
.
Radio jak zabawki z odpustu...
A czyni cuda;)
-
Tyle, że w tym poradniku jest napisane, że najpierw ustawia się w manualu a dopiero potem w automacie. W piksie masz to trochę bardziej skomplikowane ze względu na to, iż każdy kanał został dodatkowo podzielony na wejście i wyjście (RC i SERVO)
Najpierw ustawiasz aparaturę (reversy) i w pixie RC. Wszystko to w manualu. A w automacie dodatkowo SERVO.
SK jest zmiksowany z lotkami ale działa na dwa inne sposoby zależnie czy sterujesz lotkami ręcznie z aparatury(nawet w trybie automatycznym) czy też automat sam odpracowuje wychylenia.
Nie napisałeś jak zachowuje się SK w sytuacji w której uważasz, że nie tak działa jak powinien.
-
-
Po skutkach widać że tak:)
-
Niech antek uczy się jak ze styropianu zrobić coś groźnego i nie za 100 tysiaków:)
-
Z tym lasem to dobry pomysł. Trzeba by kiedyś sprawdzić jaki jest zasięg w lesie;)
-
Nic dodatkowo nie trzeba dokupować ale potrzebna jest lekka zmiana w odbiorniku. Na wyświetlaczu będzie informacja o napięciu na baterii.
-
W dzisiejszych czasach to tylko na prawo, każde inne ułożenie a w szczególności w przeciwnym kierunku nosi oznaki lewactwa.
-
 1
1
-
-
A nikt nie wziął pod uwagę że ten miernik jest do d.......
-
Tak wraca do normy, ale ......
 Do odbiornika dodajemy tylko buzer i switcha do bindowania lub jak w oprogramowaniu podamy kod bindowania to nie będzie potrzebny ani buzzer ani switch.
Do odbiornika dodajemy tylko buzer i switcha do bindowania lub jak w oprogramowaniu podamy kod bindowania to nie będzie potrzebny ani buzzer ani switch.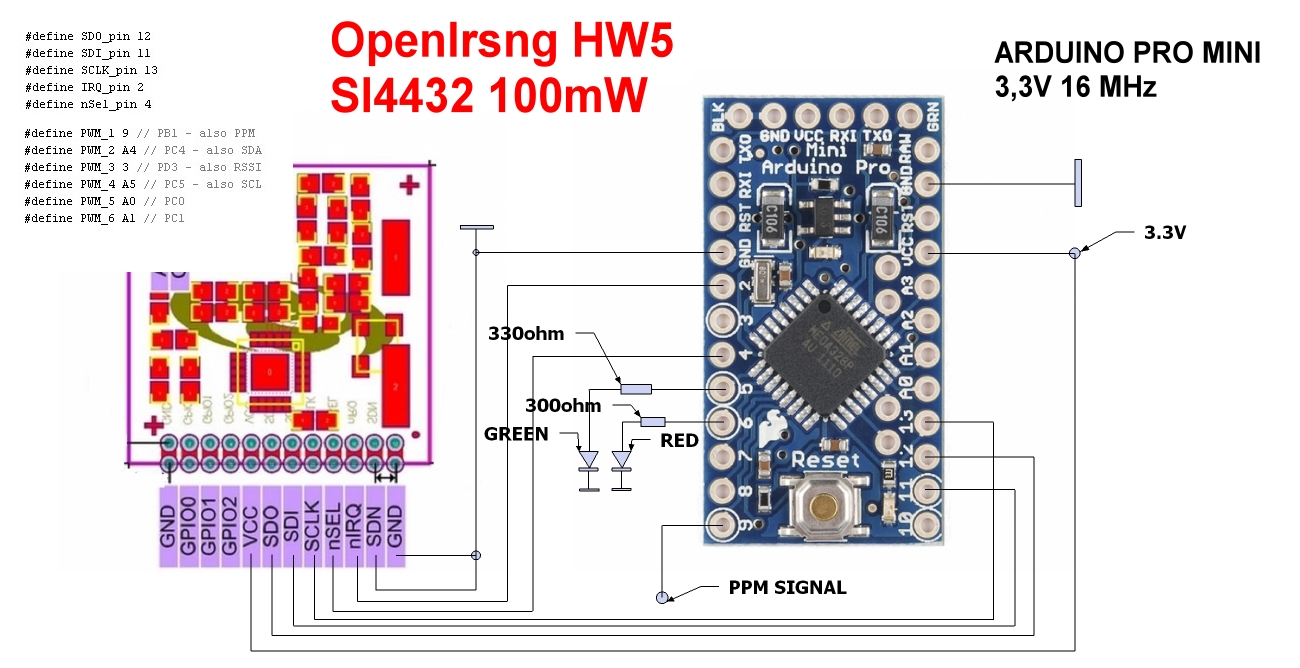

 A tak liczyłem na kogoś kto zna programowanie w arduino:(
A tak liczyłem na kogoś kto zna programowanie w arduino:(
FrSky TARANIS
w Aparatury RC
Opublikowano
Jurek a ty jakie masz radio?