Od początku 2024 roku w Unii Europejskiej obowiązują przepisy dotyczące zdalnej identyfikacji (Remote ID) dla bezzałogowych statków powietrznych. Zgodnie z rozporządzeniem delegowanym Komisji (UE) 2019/945 oraz rozporządzeniem wykonawczym (UE) 2019/947, wszystkie drony powyżej 250g oraz te wyposażone w kamerę (niezależnie od masy) muszą nadawać informacje identyfikacyjne w locie. System DroneID_MX został zaprojektowany w oparciu o normę ASTM F3411, która jest uznawana przez EASA (Europejską Agencję Bezpieczeństwa Lotniczego) jako standard dla europejskiego systemu Remote ID. Kodowanie danych odbywa się zgodnie ze specyfikacją OpenDroneID, która definiuje struktury wiadomości dla podstawowej identyfikacji, danych lokalizacyjnych, identyfikacji operatora, informacji o systemie oraz dodatkowych danych autoryzacyjnych.
Wstęp
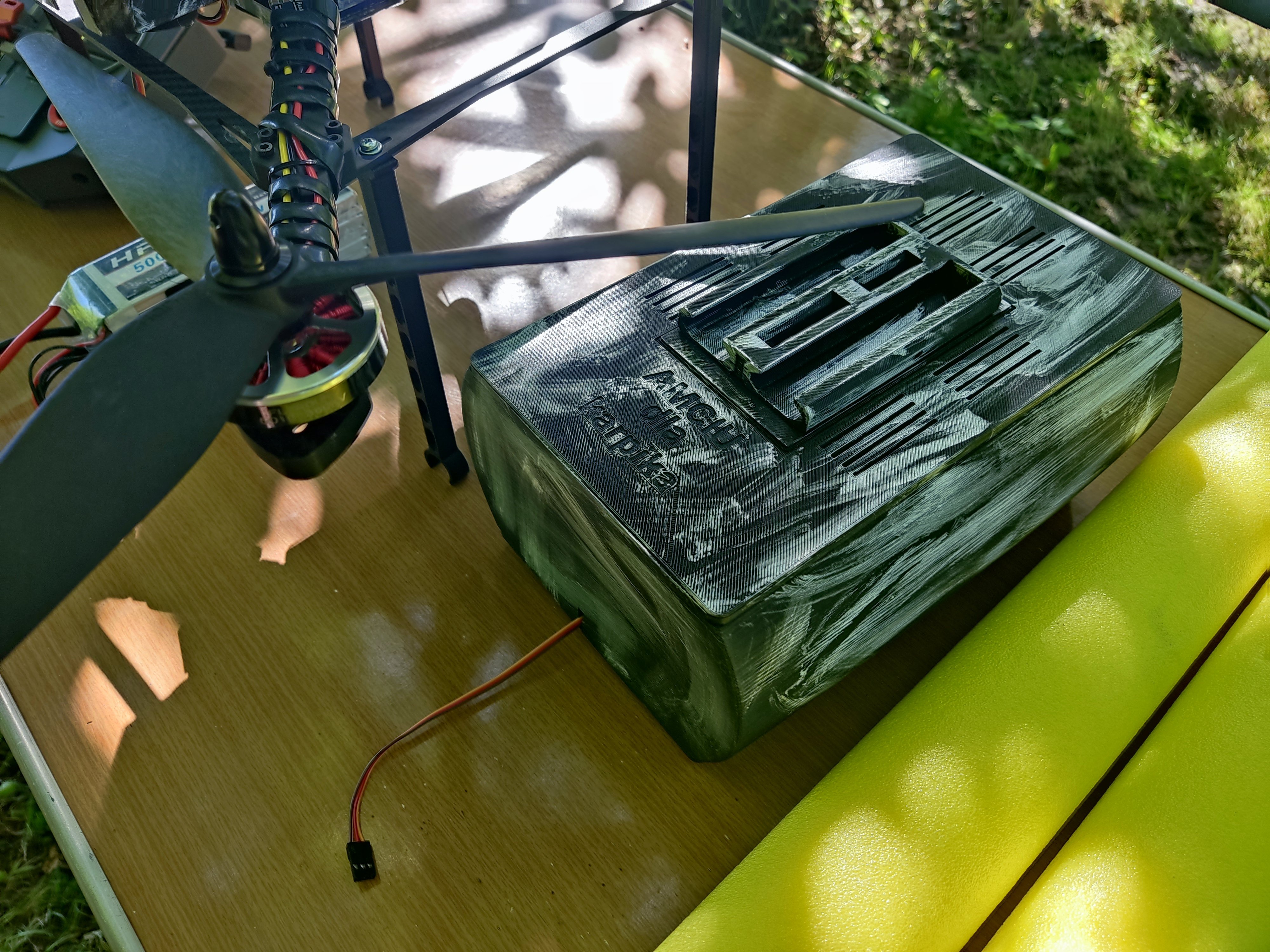
DroneID_MX V2.00 bo tak go nazwałem to w pełni autonomiczny moduł nadajnika Remote ID zgodny z normą ASTM F3411, przeznaczony dla amatorskich konstrukcji UAV oraz profesjonalnych zastosowań. System łączy w sobie dwa niezależne kanały transmisji danych: BLE (Bluetooth Low Energy) oraz WiFi Beacon, co znacząco zwiększa zasięg i niezawodność przekazywania informacji o położeniu drona.
Rozwiązania techniczne
Implementacja bez gotowych bibliotek Remote ID
System został zrealizowany w całości od podstaw, bez wykorzystywania gotowych bibliotek do komunikacji Remote ID. Wszystkie ramki danych zgodne z normą ASTM F3411 są budowane ręcznie, co daje pełną kontrolę nad formatem wiadomości, umożliwia optymalizację pod kątem szybkości działania oraz pozwala na wprowadzanie własnych rozszerzeń. Dzięki temu rozwiązanie jest w pełni przejrzyste, łatwe do modyfikacji i niezależne od zewnętrznych dostawców.
Dwukanałowa transmisja danych
Nowatorskim elementem systemu jest równoczesne rozgłaszanie danych przez BLE i WiFi Beacon:
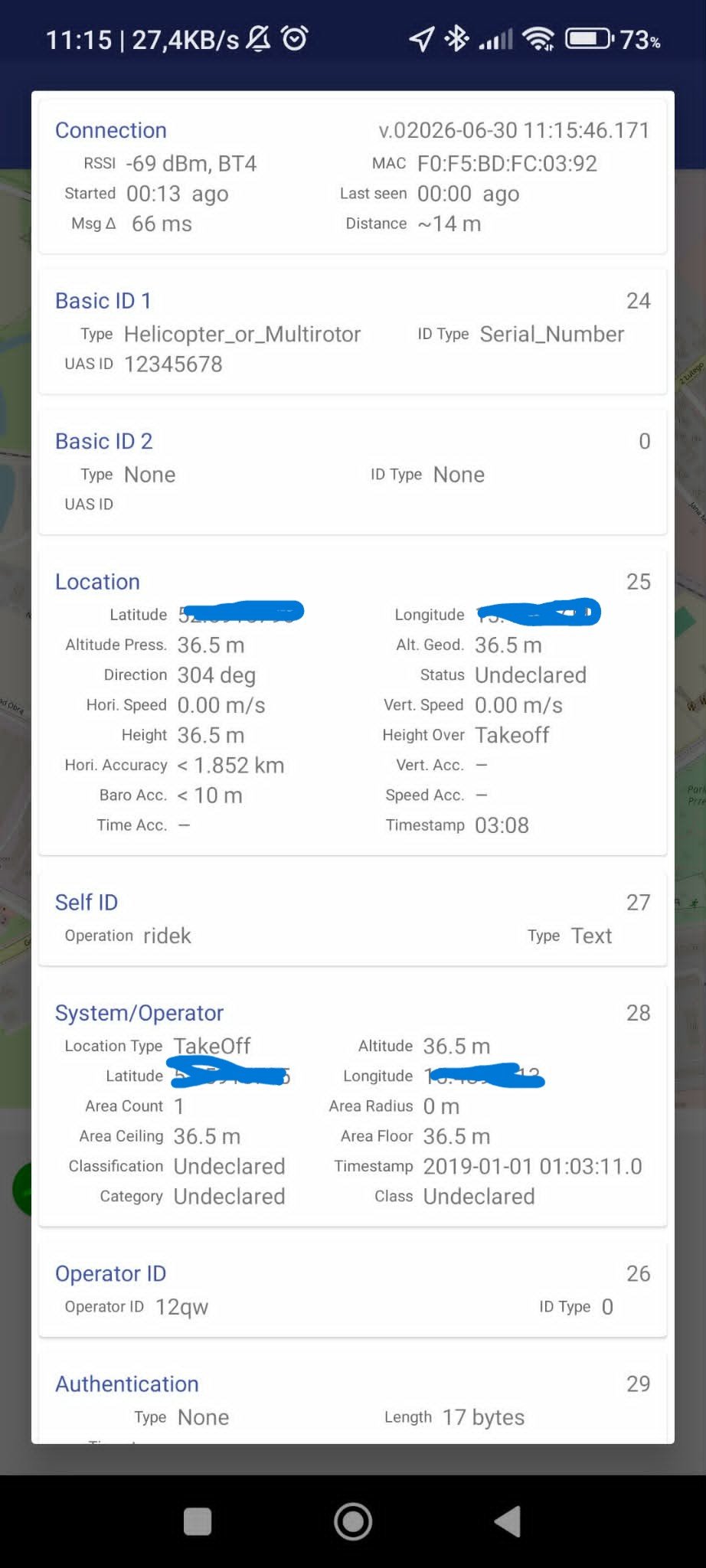
BLE (Bluetooth Low Energy) - podstawowy kanał transmisji danych zgodny z normą ASTM F3411. Nadaje wszystkie wymagane typy wiadomości: Basic ID, Location, Self ID, Operator ID, System oraz Auth. Dzięki BLE dane są dostępne dla standardowych aplikacji Remote ID na smartfonach.
WiFi Beacon - dodatkowy kanał rozgłaszania danych w sieci WiFi. Beacon zawiera te same informacje o położeniu i identyfikacji drona, ale w formacie tekstowym CSV. To rozwiązanie umożliwia odbiór danych przez urządzenia nieposiadające wsparcia dla BLE Remote ID, znacząco zwiększając kompatybilność i zasięg.
Moduł GPS
System korzysta z wbudowanego modułu GPS HT1818Z3G5L z chipsetem AT6558R, który zapewnia precyzyjne dane o położeniu, wysokości, prędkości i kierunku lotu. Dane GPS są wykorzystywane zarówno do generowania komunikatów Remote ID, jak i do automatycznego logowania trasy lotu.
Automatyczne logowanie trasy
Urządzenie automatycznie rejestruje dane z każdego lotu, zapisując je w plikach CSV na wewnętrznej pamięci LittleFS. Logi zawierają:
Czas z dokładnością do sekundy (synchronizowany z GPS)
Współrzędne geograficzne (szerokość i długość)
Wysokość nad poziomem morza
Prędkość i kierunek lotu
Liczbę widocznych satelitów GPS
Pliki są automatycznie nazywane według daty i godziny rozpoczęcia lotu, co ułatwia ich identyfikację.
Połączenie z modułem przez WiFi (tryb administratora) umożliwia:
Przeglądanie listy zapisanych logów
Pobieranie wybranych plików CSV na komputer lub smartfon.
Brak możliwości usunięcia logów przez interfejs WWW (ochrona przed przypadkowym skasowaniem danych)
Logi są zabezpieczone hasłem administratora, co uniemożliwia nieautoryzowany dostęp.
Tryb administratora
Moduł po uruchomieniu tworzy własną sieć WiFi o nazwie DroneID_MX (domyślnie hasło: 12345678). Po połączeniu się z tą siecią i wpisaniu w przeglądarce adresu IP urządzenia (domyślnie 192.168.4.1) uzyskujemy dostęp do panelu konfiguracyjnego.
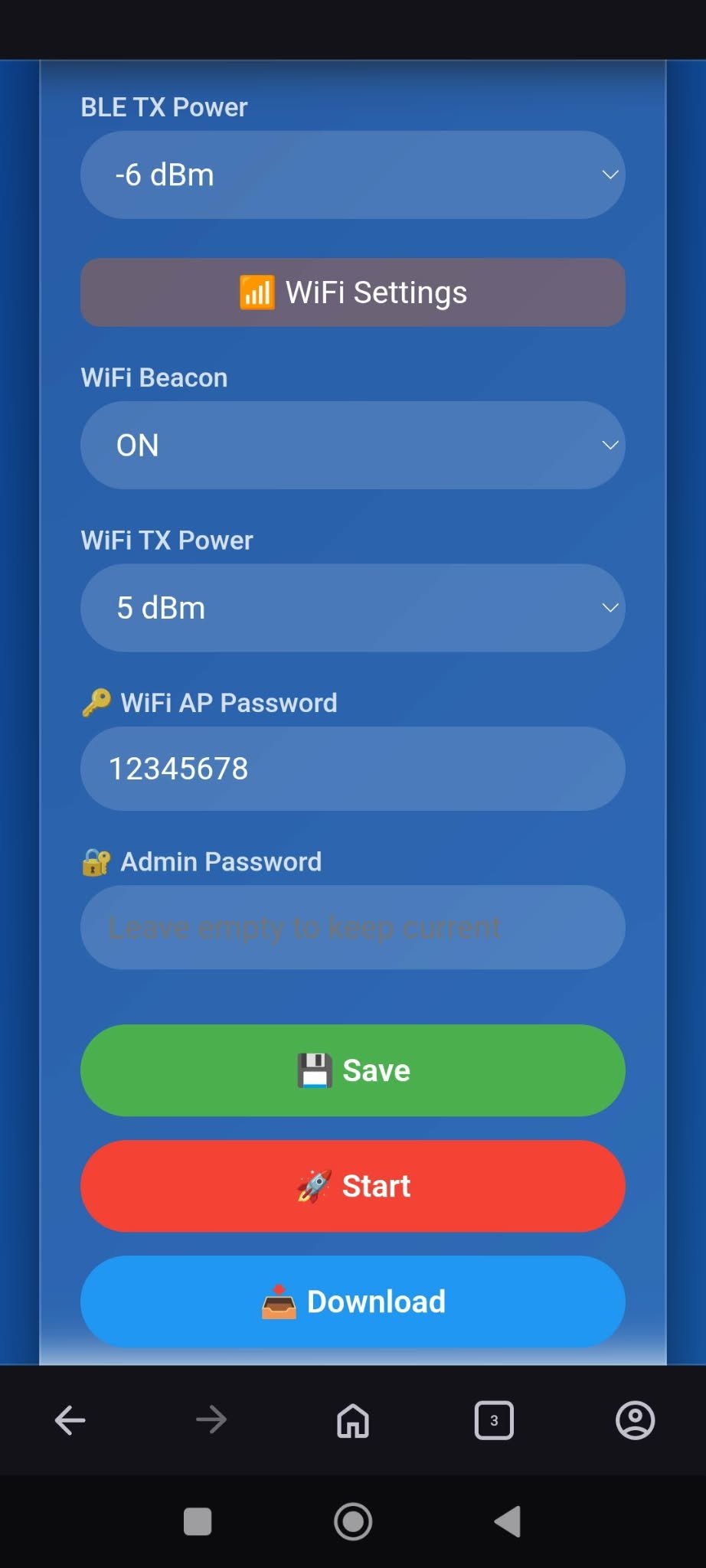
Co można modyfikować w trybie administratora:
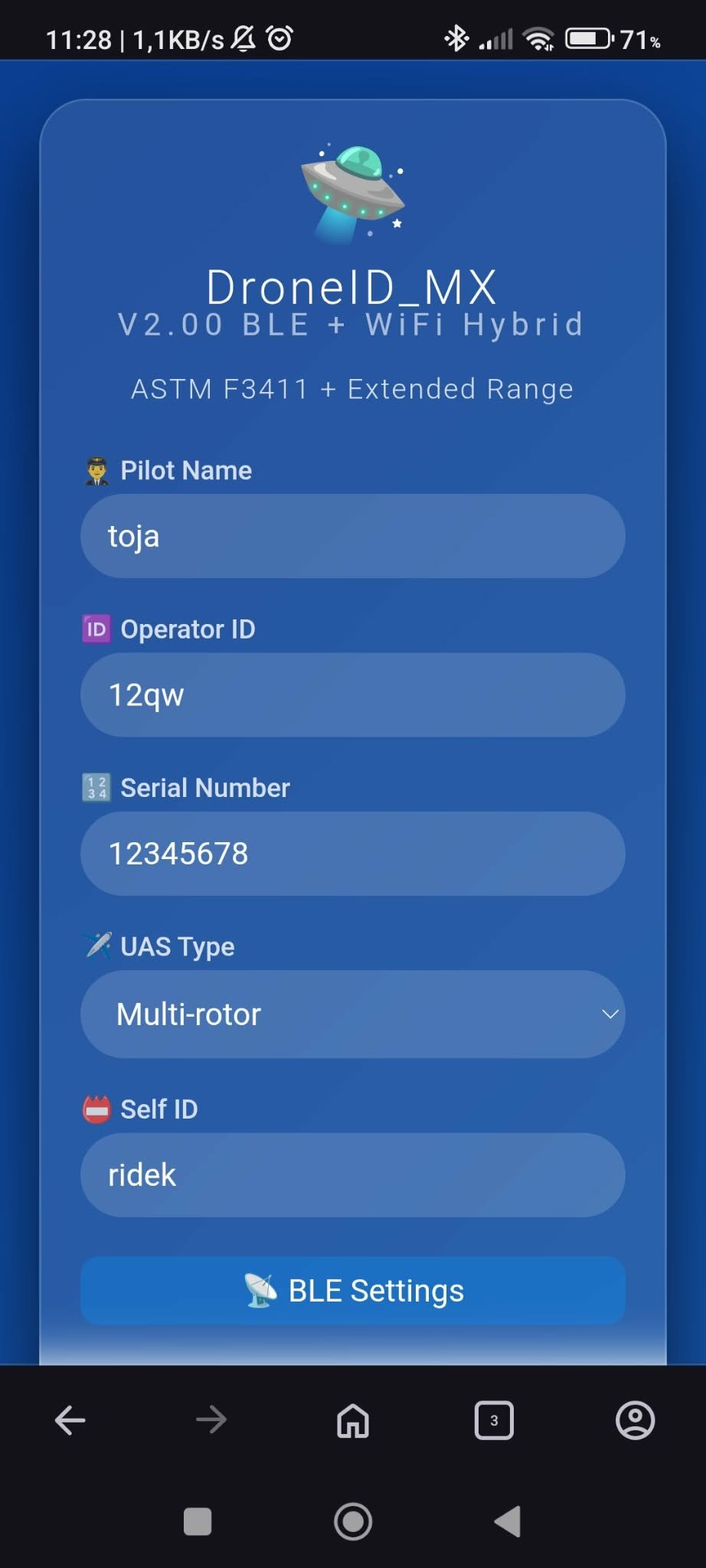
Dane identyfikacyjne:
Nazwa pilota
ID operatora
Numer seryjny drona
Nazwa własna drona (Self ID)
Typ UAS (samolot, helikopter, wielowirnikowiec, itp.)
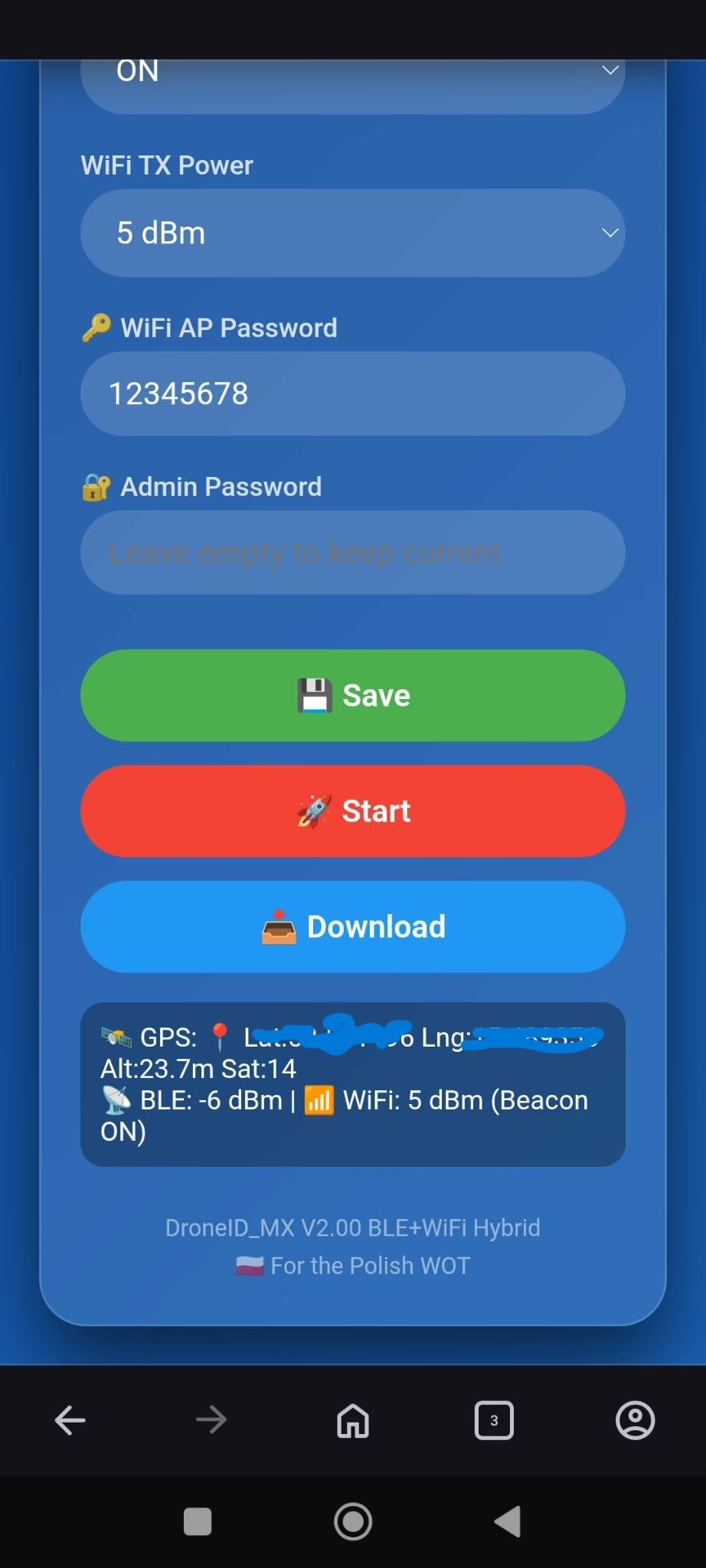
Ustawienia radiowe:
Moc nadawania BLE (od -9 dBm do +9 dBm)
Moc nadawania WiFi (od 2 dBm do 20 dBm / 100mW)
Włączenie/wyłączenie nadajnika WiFi Beacon
Zabezpieczenia:
Zmiana hasła administratora
Zmiana hasła do sieci WiFi AP
Zarządzanie logami:
Podgląd listy zapisanych plików
Pobieranie logów w formacie CSV
Parametry techniczne
Parametr Wartość
Procesor ESP32-C3 Super Mini
Moduł GPS HT1818Z3G5L / AT6558R
Częstotliwość GPS 115200 bps
Standard ASTM F3411 (C2, C5, C6)
Interwał BLE 1000 ms
Interwał WiFi Beacon 2000 ms
Pamięć logów LittleFS (do kilkudziesięciu lotów)
Format logów CSV
Zasilanie 5V USB lub zewnętrzne
Bezpieczeństwo i prywatność
System został zaprojektowany z myślą o ochronie danych:
Dostęp do konfiguracji i logów jest chroniony hasłem
Dane przesyłane są wyłącznie w celach identyfikacyjnych wymaganych przez przepisy
Brak funkcji śledzenia ani przekazywania danych do zewnętrznych serwerów
Logi są przechowywane lokalnie i mogą być pobrane tylko przez autoryzowanego użytkownika
Zastosowania
DroneID_MX znajduje zastosowanie w:
Amatorskich konstrukcjach UAV wymagających zgodności z przepisami Remote ID
W poszukiwaniach zaginionych dronów
Projektach badawczo-rozwojowych i DIY
Szkoleniach z zakresu świadomości sytuacyjnej w przestrzeni powietrznej szkolonych żołnierzy i cywilnych operatorów dronów.
Najciekawsza jest cena takiego urządzenia w podstawowej wersji kosztowała mnie 20zł GPS i 9zł ESP. Razem 29zł. Cena zwala z nóg.
Oczywiście można dodać moduł ładowania i mały akumulatorek. W tym trybie będzie to samodzielne urządzenie które nie potrzebuje nawet zasilania z drona.
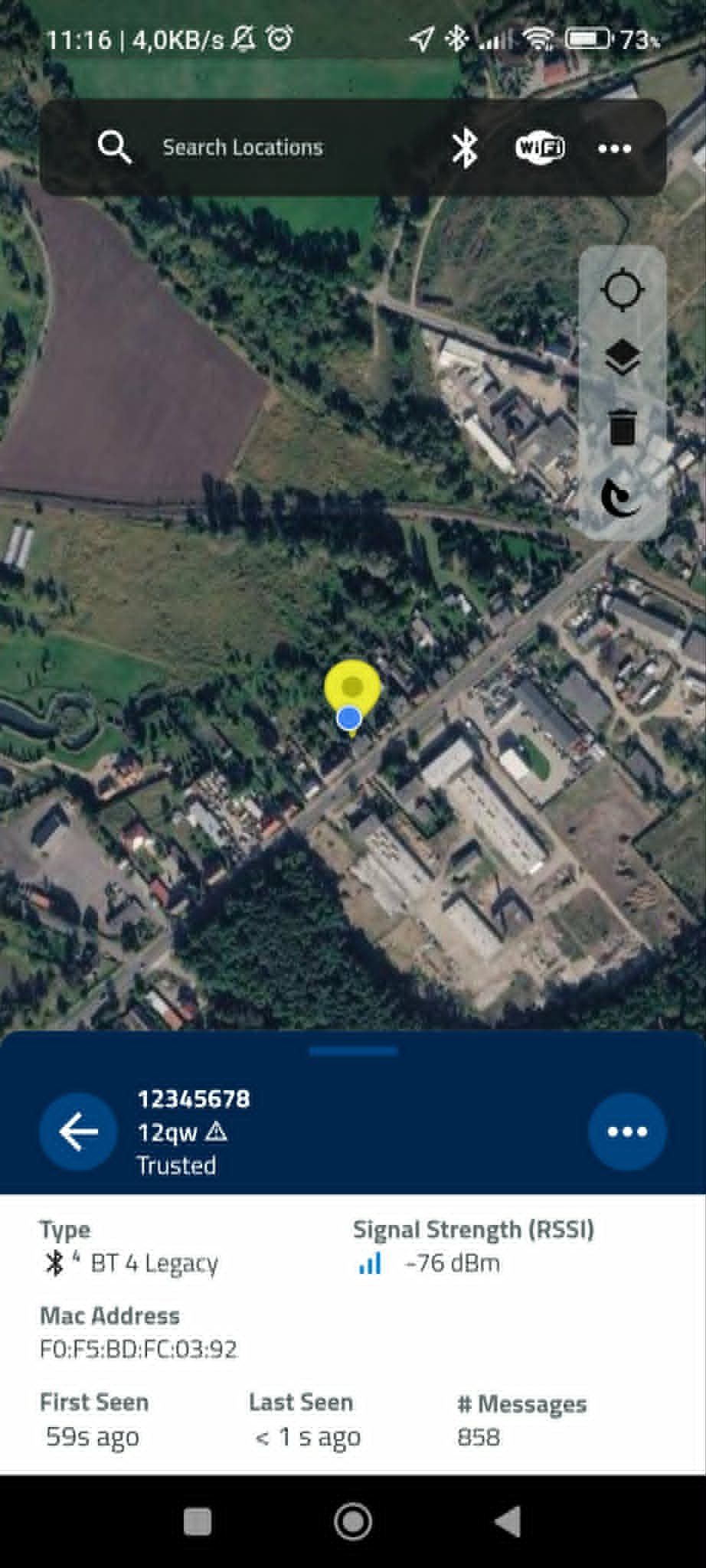
DroneID widziany jest w obu programach doatępnych dla androida takich jak dronescanner i opendroneID. Na windowsa nie ma darmowego oprogramowania.