






okruszek
-
Postów
200 -
Rejestracja
-
Ostatnia wizyta
Odpowiedzi opublikowane przez okruszek
-
-
Tak z ciekawości, mam pytanie.
Używasz jakiegoś FC czy modułu do stabilizacji lotu, czy na żywca
")
Używasz OSD z FC czy kamera bezpośrednio do VTX.
-
Kolego jak już chcesz pierwszy model drukowany to na pewno nie skrzydełko.
Jest to model raczej dla doświadczonych modelarzy.
Ja już przedrukowałem z 5kg filamentu na modele, a zaczynałem od TOTO
szybowce, modele spalinowe, drony FPV, drony LongRange.
Modele z drukarki nie wybaczają błędów .
Jak już bardzo chcesz to wydrukuj sobie skrzydełko
ale na początek polecam
https://www.thingiverse.com/thing:2337232
Najważniejsze że jak się nie przekonasz na swojej skórze to się nie nauczysz
Powodzenia w drukowaniu i tyle samo lądowań co startów
P.S
Sam teraz drukuję model z PLA+ klon ZOHD Talon

-
50 minut temu, japim napisał:
Naturalny PLA bez barwników nie jest przezroczysty. A po druku z dużym wypełnieniem (a takie chcesz w łopatkach śmigieł) będzie mleczy.
Chodziło mi o transparenty Filament Devil Design 1,75 mm PETG Transparentny
Mam taki filament bo dostałem w gratisie, to z ciekawości puszczę druk i ci pokaże jak wygląda.
-
Orzełek bardzo ładny.
Kup trochę przezroczystego PLA+ i wydrukuj sobie przezroczyste łopatki.
Sam kończę wydruk 2m szybowca z PLA+ i będę drukował śmigła.
-
 1
1
-
-
Witaj.
Twój Darwin jest klonem Tyro 129, miałem.
Co do GPS to musisz poczekać aż złapie FIXa, jeśli latasz w nowym miejscu to jest tak zwany ZIMNY start.
Jeśli dalej nie łapiesz FIXa to albo źle skonfigurowany GPS w Betaflight, albo uszkodzony moduł GPS.
Co do OSD jeśli nic się nie wyświetla, to musisz załadować CZCIONKI w Betaflight -> OSD.
Co do 4s, to zainwestuj w pakiety 4S1P VTC6 18650 Li-On, sam takie robię i latam.
Co do 7 cali to duży >?
Jestem na etapie robienia 10 calowego do Long Range
Jak będziesz miał pytania pisz śmiało

-
Witam.
Może ktoś pomoże.
Z racji że czas tylko w weekend do dość opornie idzie, ale idzie
Kontroler lotu:
FC-10 DOF
Autolaunch działa świetnie
Wszystko ładnie śmiga, tylko mam problem z RTH
Czego to ja już nie czytałem, Youtube, i ehh
Poleciałem ok 1 km od miejsca staru, właczam RTH a on zszedł na 75 m i zaczął krążyć w kółko, nie wracał do miejsca startu
Założenie które chciałby uzyskać:
Powrót do domu na wysokości 75 m
Gdy znajdzie się w promieniu 100 m od miejsca startu zacznie krążyć na wysokości 50 m
Znajdzie się jakaś pomocna dłoń żeby spojrzeć na ustawienia CLI.
# version
# INAV/WINGFC 3.0.0 Jun 12 2021 / 11:44:12 (3c7b1b7c)
# GCC-9.3.1 20200408 (release)# start the command batch
batch start# resources
# mixer
mmix reset
mmix 0 1.000 0.000 0.000 0.000
mmix 1 1.000 0.000 0.000 0.000# servo mix
smix resetsmix 0 3 1 50 0 -1
smix 1 3 0 50 0 -1
smix 2 4 1 -50 0 -1
smix 3 4 0 50 0 -1# servo
servo 0 1000 2000 1500 100
servo 1 1000 2000 1500 100
servo 2 1000 2000 1500 100
servo 3 1000 2000 1700 -100
servo 4 1000 2000 1305 -100
servo 5 1000 2000 1500 100
servo 6 1000 2000 1500 100
servo 7 1000 2000 1500 100
servo 8 1000 2000 1500 100
servo 9 1000 2000 1500 100
servo 10 1000 2000 1500 100
servo 11 1000 2000 1500 100
servo 12 1000 2000 1500 100
servo 13 1000 2000 1500 100
servo 14 1000 2000 1500 100
servo 15 1000 2000 1500 100# safehome
safehome 0 0 0 0
safehome 1 0 0 0
safehome 2 0 0 0
safehome 3 0 0 0
safehome 4 0 0 0
safehome 5 0 0 0
safehome 6 0 0 0
safehome 7 0 0 0# logic
logic 0 0 -1 0 0 0 0 0 0
logic 1 0 -1 0 0 0 0 0 0
logic 2 0 -1 0 0 0 0 0 0
logic 3 0 -1 0 0 0 0 0 0
logic 4 0 -1 0 0 0 0 0 0
logic 5 0 -1 0 0 0 0 0 0
logic 6 0 -1 0 0 0 0 0 0
logic 7 0 -1 0 0 0 0 0 0
logic 8 0 -1 0 0 0 0 0 0
logic 9 0 -1 0 0 0 0 0 0
logic 10 0 -1 0 0 0 0 0 0
logic 11 0 -1 0 0 0 0 0 0
logic 12 0 -1 0 0 0 0 0 0
logic 13 0 -1 0 0 0 0 0 0
logic 14 0 -1 0 0 0 0 0 0
logic 15 0 -1 0 0 0 0 0 0
logic 16 0 -1 0 0 0 0 0 0
logic 17 0 -1 0 0 0 0 0 0
logic 18 0 -1 0 0 0 0 0 0
logic 19 0 -1 0 0 0 0 0 0
logic 20 0 -1 0 0 0 0 0 0
logic 21 0 -1 0 0 0 0 0 0
logic 22 0 -1 0 0 0 0 0 0
logic 23 0 -1 0 0 0 0 0 0
logic 24 0 -1 0 0 0 0 0 0
logic 25 0 -1 0 0 0 0 0 0
logic 26 0 -1 0 0 0 0 0 0
logic 27 0 -1 0 0 0 0 0 0
logic 28 0 -1 0 0 0 0 0 0
logic 29 0 -1 0 0 0 0 0 0
logic 30 0 -1 0 0 0 0 0 0
logic 31 0 -1 0 0 0 0 0 0# gvar
gvar 0 0 -32768 32767
gvar 1 0 -32768 32767
gvar 2 0 -32768 32767
gvar 3 0 -32768 32767
gvar 4 0 -32768 32767
gvar 5 0 -32768 32767
gvar 6 0 -32768 32767
gvar 7 0 -32768 32767# pid
pid 0 0 0 0 0 0 0 0 0 0
pid 1 0 0 0 0 0 0 0 0 0
pid 2 0 0 0 0 0 0 0 0 0
pid 3 0 0 0 0 0 0 0 0 0# feature
feature -THR_VBAT_COMP
feature -VBAT
feature -TX_PROF_SEL
feature -BAT_PROF_AUTOSWITCH
feature -MOTOR_STOP
feature -SOFTSERIAL
feature -GPS
feature -RPM_FILTERS
feature -TELEMETRY
feature -CURRENT_METER
feature -REVERSIBLE_MOTORS
feature -RSSI_ADC
feature -LED_STRIP
feature -DASHBOARD
feature -BLACKBOX
feature -TRANSPONDER
feature -AIRMODE
feature -SUPEREXPO
feature -VTX
feature -PWM_OUTPUT_ENABLE
feature -OSD
feature -FW_LAUNCH
feature -FW_AUTOTRIM
feature VBAT
feature TX_PROF_SEL
feature MOTOR_STOP
feature GPS
feature TELEMETRY
feature CURRENT_METER
feature AIRMODE
feature PWM_OUTPUT_ENABLE
feature OSD
feature FW_AUTOTRIM# beeper
beeper RUNTIME_CALIBRATION
beeper HW_FAILURE
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACTION_SUCCESS
beeper ACTION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
beeper CAM_CONNECTION_OPEN
beeper CAM_CONNECTION_CLOSED# map
map AETR# serial
serial 20 1 115200 115200 0 115200
serial 0 1 115200 115200 0 115200
serial 1 0 115200 115200 0 115200
serial 2 64 115200 115200 0 115200
serial 3 0 115200 115200 0 115200
serial 4 2 115200 57600 0 115200
serial 5 0 115200 115200 0 115200# aux
aux 0 0 0 1175 2050
aux 1 1 1 900 1300
aux 2 2 1 1300 1700
aux 3 10 2 1950 2100
aux 4 36 3 1300 2100
aux 5 0 0 900 900
aux 6 0 0 900 900
aux 7 0 0 900 900
aux 8 0 0 900 900
aux 9 0 0 900 900
aux 10 0 0 900 900
aux 11 0 0 900 900
aux 12 0 0 900 900
aux 13 0 0 900 900
aux 14 0 0 900 900
aux 15 0 0 900 900
aux 16 0 0 900 900
aux 17 0 0 900 900
aux 18 0 0 900 900
aux 19 0 0 900 900
aux 20 0 0 900 900
aux 21 0 0 900 900
aux 22 0 0 900 900
aux 23 0 0 900 900
aux 24 0 0 900 900
aux 25 0 0 900 900
aux 26 0 0 900 900
aux 27 0 0 900 900
aux 28 0 0 900 900
aux 29 0 0 900 900
aux 30 0 0 900 900
aux 31 0 0 900 900
aux 32 0 0 900 900
aux 33 0 0 900 900
aux 34 0 0 900 900
aux 35 0 0 900 900
aux 36 0 0 900 900
aux 37 0 0 900 900
aux 38 0 0 900 900
aux 39 0 0 900 900# adjrange
adjrange 0 0 0 900 900 0 0
adjrange 1 0 0 900 900 0 0
adjrange 2 0 0 900 900 0 0
adjrange 3 0 0 900 900 0 0
adjrange 4 0 0 900 900 0 0
adjrange 5 0 0 900 900 0 0
adjrange 6 0 0 900 900 0 0
adjrange 7 0 0 900 900 0 0
adjrange 8 0 0 900 900 0 0
adjrange 9 0 0 900 900 0 0
adjrange 10 0 0 900 900 0 0
adjrange 11 0 0 900 900 0 0
adjrange 12 0 0 900 900 0 0
adjrange 13 0 0 900 900 0 0
adjrange 14 0 0 900 900 0 0
adjrange 15 0 0 900 900 0 0
adjrange 16 0 0 900 900 0 0
adjrange 17 0 0 900 900 0 0
adjrange 18 0 0 900 900 0 0
adjrange 19 0 0 900 900 0 0# rxrange
rxrange 0 1000 2000
rxrange 1 1000 2000
rxrange 2 1000 2000
rxrange 3 1000 2000# temp_sensor
temp_sensor 0 0 0 0 0 0
temp_sensor 1 0 0 0 0 0
temp_sensor 2 0 0 0 0 0
temp_sensor 3 0 0 0 0 0
temp_sensor 4 0 0 0 0 0
temp_sensor 5 0 0 0 0 0
temp_sensor 6 0 0 0 0 0
temp_sensor 7 0 0 0 0 0# wp
#wp 0 invalid
wp 0 0 0 0 0 0 0 0 0
wp 1 0 0 0 0 0 0 0 0
wp 2 0 0 0 0 0 0 0 0
wp 3 0 0 0 0 0 0 0 0
wp 4 0 0 0 0 0 0 0 0
wp 5 0 0 0 0 0 0 0 0
wp 6 0 0 0 0 0 0 0 0
wp 7 0 0 0 0 0 0 0 0
wp 8 0 0 0 0 0 0 0 0
wp 9 0 0 0 0 0 0 0 0
wp 10 0 0 0 0 0 0 0 0
wp 11 0 0 0 0 0 0 0 0
wp 12 0 0 0 0 0 0 0 0
wp 13 0 0 0 0 0 0 0 0
wp 14 0 0 0 0 0 0 0 0
wp 15 0 0 0 0 0 0 0 0
wp 16 0 0 0 0 0 0 0 0
wp 17 0 0 0 0 0 0 0 0
wp 18 0 0 0 0 0 0 0 0
wp 19 0 0 0 0 0 0 0 0
wp 20 0 0 0 0 0 0 0 0
wp 21 0 0 0 0 0 0 0 0
wp 22 0 0 0 0 0 0 0 0
wp 23 0 0 0 0 0 0 0 0
wp 24 0 0 0 0 0 0 0 0
wp 25 0 0 0 0 0 0 0 0
wp 26 0 0 0 0 0 0 0 0
wp 27 0 0 0 0 0 0 0 0
wp 28 0 0 0 0 0 0 0 0
wp 29 0 0 0 0 0 0 0 0
wp 30 0 0 0 0 0 0 0 0
wp 31 0 0 0 0 0 0 0 0
wp 32 0 0 0 0 0 0 0 0
wp 33 0 0 0 0 0 0 0 0
wp 34 0 0 0 0 0 0 0 0
wp 35 0 0 0 0 0 0 0 0
wp 36 0 0 0 0 0 0 0 0
wp 37 0 0 0 0 0 0 0 0
wp 38 0 0 0 0 0 0 0 0
wp 39 0 0 0 0 0 0 0 0
wp 40 0 0 0 0 0 0 0 0
wp 41 0 0 0 0 0 0 0 0
wp 42 0 0 0 0 0 0 0 0
wp 43 0 0 0 0 0 0 0 0
wp 44 0 0 0 0 0 0 0 0
wp 45 0 0 0 0 0 0 0 0
wp 46 0 0 0 0 0 0 0 0
wp 47 0 0 0 0 0 0 0 0
wp 48 0 0 0 0 0 0 0 0
wp 49 0 0 0 0 0 0 0 0
wp 50 0 0 0 0 0 0 0 0
wp 51 0 0 0 0 0 0 0 0
wp 52 0 0 0 0 0 0 0 0
wp 53 0 0 0 0 0 0 0 0
wp 54 0 0 0 0 0 0 0 0
wp 55 0 0 0 0 0 0 0 0
wp 56 0 0 0 0 0 0 0 0
wp 57 0 0 0 0 0 0 0 0
wp 58 0 0 0 0 0 0 0 0
wp 59 0 0 0 0 0 0 0 0# osd_layout
osd_layout 0 0 18 1 V
osd_layout 0 1 1 1 V
osd_layout 0 2 0 0 H
osd_layout 0 3 8 6 V
osd_layout 0 4 8 6 V
osd_layout 0 5 23 8 H
osd_layout 0 6 23 1 V
osd_layout 0 7 1 13 V
osd_layout 0 8 20 2 H
osd_layout 0 9 1 2 H
osd_layout 0 10 8 6 H
osd_layout 0 11 1 3 V
osd_layout 0 12 0 5 V
osd_layout 0 13 20 12 V
osd_layout 0 14 12 1 V
osd_layout 0 15 13 12 V
osd_layout 0 16 2 10 H
osd_layout 0 17 2 11 H
osd_layout 0 18 2 12 H
osd_layout 0 19 15 1 H
osd_layout 0 20 18 12 H
osd_layout 0 21 0 12 H
osd_layout 0 22 14 3 V
osd_layout 0 23 5 12 V
osd_layout 0 24 12 2 H
osd_layout 0 25 23 5 H
osd_layout 0 26 24 7 H
osd_layout 0 27 3 5 H
osd_layout 0 28 1 10 H
osd_layout 0 29 23 12 H
osd_layout 0 30 2 14 V
osd_layout 0 31 0 10 H
osd_layout 0 32 12 1 H
osd_layout 0 33 6 2 H
osd_layout 0 34 18 2 H
osd_layout 0 35 1 5 H
osd_layout 0 36 1 5 H
osd_layout 0 37 1 6 H
osd_layout 0 38 1 7 H
osd_layout 0 39 1 5 H
osd_layout 0 40 1 2 H
osd_layout 0 41 1 8 H
osd_layout 0 42 1 7 H
osd_layout 0 43 0 0 H
osd_layout 0 44 0 0 H
osd_layout 0 45 0 0 H
osd_layout 0 46 3 6 H
osd_layout 0 47 3 7 H
osd_layout 0 48 23 7 H
osd_layout 0 49 23 6 H
osd_layout 0 50 0 0 H
osd_layout 0 51 12 2 H
osd_layout 0 52 12 2 H
osd_layout 0 53 12 1 H
osd_layout 0 54 12 1 H
osd_layout 0 55 1 8 H
osd_layout 0 56 2 12 H
osd_layout 0 57 2 12 H
osd_layout 0 58 2 12 H
osd_layout 0 59 2 12 H
osd_layout 0 60 2 12 H
osd_layout 0 61 2 12 H
osd_layout 0 62 2 10 H
osd_layout 0 63 2 11 H
osd_layout 0 64 2 12 H
osd_layout 0 65 2 12 H
osd_layout 0 66 2 12 H
osd_layout 0 67 2 12 H
osd_layout 0 68 2 12 H
osd_layout 0 69 2 12 H
osd_layout 0 70 2 12 H
osd_layout 0 71 2 12 H
osd_layout 0 72 2 12 H
osd_layout 0 73 2 12 H
osd_layout 0 74 2 12 H
osd_layout 0 75 2 12 H
osd_layout 0 76 2 12 H
osd_layout 0 77 2 12 H
osd_layout 0 78 0 0 H
osd_layout 0 79 2 12 H
osd_layout 0 80 2 12 H
osd_layout 0 81 2 12 H
osd_layout 0 82 2 12 H
osd_layout 0 83 2 12 H
osd_layout 0 84 2 12 H
osd_layout 0 85 23 1 H
osd_layout 0 86 19 2 H
osd_layout 0 87 19 3 H
osd_layout 0 88 19 4 H
osd_layout 0 89 19 5 H
osd_layout 0 90 19 6 H
osd_layout 0 91 19 7 H
osd_layout 0 92 19 8 H
osd_layout 0 93 19 9 H
osd_layout 0 94 19 10 H
osd_layout 0 95 19 11 H
osd_layout 0 96 0 0 H
osd_layout 0 97 0 12 H
osd_layout 0 98 0 0 H
osd_layout 0 99 0 0 H
osd_layout 0 100 12 4 H
osd_layout 0 101 12 5 H
osd_layout 0 102 12 6 H
osd_layout 0 103 12 7 H
osd_layout 0 104 0 0 H
osd_layout 0 105 3 5 H
osd_layout 0 106 0 0 H
osd_layout 0 107 0 0 H
osd_layout 0 108 2 12 H
osd_layout 0 109 22 1 H
osd_layout 0 110 15 4 H
osd_layout 0 111 24 9 H
osd_layout 0 112 24 10 H
osd_layout 0 113 1 1 H
osd_layout 0 114 1 2 H
osd_layout 0 115 1 3 H
osd_layout 0 116 1 4 H
osd_layout 0 117 0 0 H
osd_layout 0 118 0 0 H
osd_layout 0 119 0 0 H
osd_layout 0 120 0 0 H
osd_layout 0 121 3 4 H
osd_layout 0 122 3 5 H
osd_layout 0 123 3 6 H
osd_layout 0 124 23 2 H
osd_layout 1 0 23 0 H
osd_layout 1 1 12 0 H
osd_layout 1 2 0 0 H
osd_layout 1 3 8 6 H
osd_layout 1 4 8 6 H
osd_layout 1 5 23 8 H
osd_layout 1 6 23 9 H
osd_layout 1 7 13 12 H
osd_layout 1 8 20 2 H
osd_layout 1 9 1 2 H
osd_layout 1 10 8 6 H
osd_layout 1 11 2 3 H
osd_layout 1 12 1 4 H
osd_layout 1 13 23 1 H
osd_layout 1 14 0 11 H
osd_layout 1 15 1 0 H
osd_layout 1 16 2 10 H
osd_layout 1 17 2 11 H
osd_layout 1 18 2 12 H
osd_layout 1 19 15 1 H
osd_layout 1 20 18 12 H
osd_layout 1 21 0 12 H
osd_layout 1 22 14 11 H
osd_layout 1 23 1 1 H
osd_layout 1 24 12 2 H
osd_layout 1 25 23 5 H
osd_layout 1 26 24 7 H
osd_layout 1 27 3 5 H
osd_layout 1 28 23 11 H
osd_layout 1 29 23 12 H
osd_layout 1 30 1 13 H
osd_layout 1 31 0 10 H
osd_layout 1 32 12 1 H
osd_layout 1 33 6 2 H
osd_layout 1 34 18 2 H
osd_layout 1 35 1 5 H
osd_layout 1 36 1 5 H
osd_layout 1 37 1 6 H
osd_layout 1 38 1 7 H
osd_layout 1 39 1 5 H
osd_layout 1 40 1 2 H
osd_layout 1 41 1 8 H
osd_layout 1 42 1 7 H
osd_layout 1 43 0 0 H
osd_layout 1 44 0 0 H
osd_layout 1 45 0 0 H
osd_layout 1 46 3 6 H
osd_layout 1 47 3 7 H
osd_layout 1 48 23 7 H
osd_layout 1 49 23 6 H
osd_layout 1 50 0 0 H
osd_layout 1 51 12 2 H
osd_layout 1 52 12 2 H
osd_layout 1 53 12 1 H
osd_layout 1 54 12 1 H
osd_layout 1 55 1 8 H
osd_layout 1 56 2 12 H
osd_layout 1 57 2 12 H
osd_layout 1 58 2 12 H
osd_layout 1 59 2 12 H
osd_layout 1 60 2 12 H
osd_layout 1 61 2 12 H
osd_layout 1 62 2 10 H
osd_layout 1 63 2 11 H
osd_layout 1 64 2 12 H
osd_layout 1 65 2 12 H
osd_layout 1 66 2 12 H
osd_layout 1 67 2 12 H
osd_layout 1 68 2 12 H
osd_layout 1 69 2 12 H
osd_layout 1 70 2 12 H
osd_layout 1 71 2 12 H
osd_layout 1 72 2 12 H
osd_layout 1 73 2 12 H
osd_layout 1 74 2 12 H
osd_layout 1 75 2 12 H
osd_layout 1 76 2 12 H
osd_layout 1 77 2 12 H
osd_layout 1 78 0 0 H
osd_layout 1 79 2 12 H
osd_layout 1 80 2 12 H
osd_layout 1 81 2 12 H
osd_layout 1 82 2 12 H
osd_layout 1 83 2 12 H
osd_layout 1 84 2 12 H
osd_layout 1 85 23 1 H
osd_layout 1 86 19 2 H
osd_layout 1 87 19 3 H
osd_layout 1 88 19 4 H
osd_layout 1 89 19 5 H
osd_layout 1 90 19 6 H
osd_layout 1 91 19 7 H
osd_layout 1 92 19 8 H
osd_layout 1 93 19 9 H
osd_layout 1 94 19 10 H
osd_layout 1 95 19 11 H
osd_layout 1 96 0 0 H
osd_layout 1 97 0 12 H
osd_layout 1 98 0 0 H
osd_layout 1 99 0 0 H
osd_layout 1 100 12 4 H
osd_layout 1 101 12 5 H
osd_layout 1 102 12 6 H
osd_layout 1 103 12 7 H
osd_layout 1 104 0 0 H
osd_layout 1 105 3 5 H
osd_layout 1 106 0 0 H
osd_layout 1 107 0 0 H
osd_layout 1 108 2 12 H
osd_layout 1 109 23 12 H
osd_layout 1 110 23 11 H
osd_layout 1 111 24 9 H
osd_layout 1 112 24 10 H
osd_layout 1 113 1 1 H
osd_layout 1 114 1 2 H
osd_layout 1 115 1 3 H
osd_layout 1 116 1 4 H
osd_layout 1 117 0 0 H
osd_layout 1 118 0 0 H
osd_layout 1 119 0 0 H
osd_layout 1 120 0 0 H
osd_layout 1 121 3 4 H
osd_layout 1 122 3 5 H
osd_layout 1 123 3 6 H
osd_layout 1 124 23 2 H
osd_layout 2 0 23 0 H
osd_layout 2 1 12 0 H
osd_layout 2 2 0 0 H
osd_layout 2 3 8 6 H
osd_layout 2 4 8 6 H
osd_layout 2 5 23 8 H
osd_layout 2 6 23 9 H
osd_layout 2 7 13 12 H
osd_layout 2 8 20 2 H
osd_layout 2 9 1 2 H
osd_layout 2 10 8 6 H
osd_layout 2 11 2 3 H
osd_layout 2 12 1 4 H
osd_layout 2 13 23 1 H
osd_layout 2 14 0 11 H
osd_layout 2 15 1 0 H
osd_layout 2 16 2 10 H
osd_layout 2 17 2 11 H
osd_layout 2 18 2 12 H
osd_layout 2 19 15 1 H
osd_layout 2 20 18 12 H
osd_layout 2 21 0 12 H
osd_layout 2 22 14 11 H
osd_layout 2 23 1 1 H
osd_layout 2 24 12 2 H
osd_layout 2 25 23 5 H
osd_layout 2 26 24 7 H
osd_layout 2 27 3 5 H
osd_layout 2 28 23 11 H
osd_layout 2 29 23 12 H
osd_layout 2 30 1 13 H
osd_layout 2 31 0 10 H
osd_layout 2 32 12 1 H
osd_layout 2 33 6 2 H
osd_layout 2 34 18 2 H
osd_layout 2 35 1 5 H
osd_layout 2 36 1 5 H
osd_layout 2 37 1 6 H
osd_layout 2 38 1 7 H
osd_layout 2 39 1 5 H
osd_layout 2 40 1 2 H
osd_layout 2 41 1 8 H
osd_layout 2 42 1 7 H
osd_layout 2 43 0 0 H
osd_layout 2 44 0 0 H
osd_layout 2 45 0 0 H
osd_layout 2 46 3 6 H
osd_layout 2 47 3 7 H
osd_layout 2 48 23 7 H
osd_layout 2 49 23 6 H
osd_layout 2 50 0 0 H
osd_layout 2 51 12 2 H
osd_layout 2 52 12 2 H
osd_layout 2 53 12 1 H
osd_layout 2 54 12 1 H
osd_layout 2 55 1 8 H
osd_layout 2 56 2 12 H
osd_layout 2 57 2 12 H
osd_layout 2 58 2 12 H
osd_layout 2 59 2 12 H
osd_layout 2 60 2 12 H
osd_layout 2 61 2 12 H
osd_layout 2 62 2 10 H
osd_layout 2 63 2 11 H
osd_layout 2 64 2 12 H
osd_layout 2 65 2 12 H
osd_layout 2 66 2 12 H
osd_layout 2 67 2 12 H
osd_layout 2 68 2 12 H
osd_layout 2 69 2 12 H
osd_layout 2 70 2 12 H
osd_layout 2 71 2 12 H
osd_layout 2 72 2 12 H
osd_layout 2 73 2 12 H
osd_layout 2 74 2 12 H
osd_layout 2 75 2 12 H
osd_layout 2 76 2 12 H
osd_layout 2 77 2 12 H
osd_layout 2 78 0 0 H
osd_layout 2 79 2 12 H
osd_layout 2 80 2 12 H
osd_layout 2 81 2 12 H
osd_layout 2 82 2 12 H
osd_layout 2 83 2 12 H
osd_layout 2 84 2 12 H
osd_layout 2 85 23 1 H
osd_layout 2 86 19 2 H
osd_layout 2 87 19 3 H
osd_layout 2 88 19 4 H
osd_layout 2 89 19 5 H
osd_layout 2 90 19 6 H
osd_layout 2 91 19 7 H
osd_layout 2 92 19 8 H
osd_layout 2 93 19 9 H
osd_layout 2 94 19 10 H
osd_layout 2 95 19 11 H
osd_layout 2 96 0 0 H
osd_layout 2 97 0 12 H
osd_layout 2 98 0 0 H
osd_layout 2 99 0 0 H
osd_layout 2 100 12 4 H
osd_layout 2 101 12 5 H
osd_layout 2 102 12 6 H
osd_layout 2 103 12 7 H
osd_layout 2 104 0 0 H
osd_layout 2 105 3 5 H
osd_layout 2 106 0 0 H
osd_layout 2 107 0 0 H
osd_layout 2 108 2 12 H
osd_layout 2 109 23 12 H
osd_layout 2 110 23 11 H
osd_layout 2 111 24 9 H
osd_layout 2 112 24 10 H
osd_layout 2 113 1 1 H
osd_layout 2 114 1 2 H
osd_layout 2 115 1 3 H
osd_layout 2 116 1 4 H
osd_layout 2 117 0 0 H
osd_layout 2 118 0 0 H
osd_layout 2 119 0 0 H
osd_layout 2 120 0 0 H
osd_layout 2 121 3 4 H
osd_layout 2 122 3 5 H
osd_layout 2 123 3 6 H
osd_layout 2 124 23 2 H
osd_layout 3 0 23 0 H
osd_layout 3 1 12 0 H
osd_layout 3 2 0 0 H
osd_layout 3 3 8 6 H
osd_layout 3 4 8 6 H
osd_layout 3 5 23 8 H
osd_layout 3 6 23 9 H
osd_layout 3 7 13 12 H
osd_layout 3 8 20 2 H
osd_layout 3 9 1 2 H
osd_layout 3 10 8 6 H
osd_layout 3 11 2 3 H
osd_layout 3 12 1 4 H
osd_layout 3 13 23 1 H
osd_layout 3 14 0 11 H
osd_layout 3 15 1 0 H
osd_layout 3 16 2 10 H
osd_layout 3 17 2 11 H
osd_layout 3 18 2 12 H
osd_layout 3 19 15 1 H
osd_layout 3 20 18 12 H
osd_layout 3 21 0 12 H
osd_layout 3 22 14 11 H
osd_layout 3 23 1 1 H
osd_layout 3 24 12 2 H
osd_layout 3 25 23 5 H
osd_layout 3 26 24 7 H
osd_layout 3 27 3 5 H
osd_layout 3 28 23 11 H
osd_layout 3 29 23 12 H
osd_layout 3 30 1 13 H
osd_layout 3 31 0 10 H
osd_layout 3 32 12 1 H
osd_layout 3 33 6 2 H
osd_layout 3 34 18 2 H
osd_layout 3 35 1 5 H
osd_layout 3 36 1 5 H
osd_layout 3 37 1 6 H
osd_layout 3 38 1 7 H
osd_layout 3 39 1 5 H
osd_layout 3 40 1 2 H
osd_layout 3 41 1 8 H
osd_layout 3 42 1 7 H
osd_layout 3 43 0 0 H
osd_layout 3 44 0 0 H
osd_layout 3 45 0 0 H
osd_layout 3 46 3 6 H
osd_layout 3 47 3 7 H
osd_layout 3 48 23 7 H
osd_layout 3 49 23 6 H
osd_layout 3 50 0 0 H
osd_layout 3 51 12 2 H
osd_layout 3 52 12 2 H
osd_layout 3 53 12 1 H
osd_layout 3 54 12 1 H
osd_layout 3 55 1 8 H
osd_layout 3 56 2 12 H
osd_layout 3 57 2 12 H
osd_layout 3 58 2 12 H
osd_layout 3 59 2 12 H
osd_layout 3 60 2 12 H
osd_layout 3 61 2 12 H
osd_layout 3 62 2 10 H
osd_layout 3 63 2 11 H
osd_layout 3 64 2 12 H
osd_layout 3 65 2 12 H
osd_layout 3 66 2 12 H
osd_layout 3 67 2 12 H
osd_layout 3 68 2 12 H
osd_layout 3 69 2 12 H
osd_layout 3 70 2 12 H
osd_layout 3 71 2 12 H
osd_layout 3 72 2 12 H
osd_layout 3 73 2 12 H
osd_layout 3 74 2 12 H
osd_layout 3 75 2 12 H
osd_layout 3 76 2 12 H
osd_layout 3 77 2 12 H
osd_layout 3 78 0 0 H
osd_layout 3 79 2 12 H
osd_layout 3 80 2 12 H
osd_layout 3 81 2 12 H
osd_layout 3 82 2 12 H
osd_layout 3 83 2 12 H
osd_layout 3 84 2 12 H
osd_layout 3 85 23 1 H
osd_layout 3 86 19 2 H
osd_layout 3 87 19 3 H
osd_layout 3 88 19 4 H
osd_layout 3 89 19 5 H
osd_layout 3 90 19 6 H
osd_layout 3 91 19 7 H
osd_layout 3 92 19 8 H
osd_layout 3 93 19 9 H
osd_layout 3 94 19 10 H
osd_layout 3 95 19 11 H
osd_layout 3 96 0 0 H
osd_layout 3 97 0 12 H
osd_layout 3 98 0 0 H
osd_layout 3 99 0 0 H
osd_layout 3 100 12 4 H
osd_layout 3 101 12 5 H
osd_layout 3 102 12 6 H
osd_layout 3 103 12 7 H
osd_layout 3 104 0 0 H
osd_layout 3 105 3 5 H
osd_layout 3 106 0 0 H
osd_layout 3 107 0 0 H
osd_layout 3 108 2 12 H
osd_layout 3 109 23 12 H
osd_layout 3 110 23 11 H
osd_layout 3 111 24 9 H
osd_layout 3 112 24 10 H
osd_layout 3 113 1 1 H
osd_layout 3 114 1 2 H
osd_layout 3 115 1 3 H
osd_layout 3 116 1 4 H
osd_layout 3 117 0 0 H
osd_layout 3 118 0 0 H
osd_layout 3 119 0 0 H
osd_layout 3 120 0 0 H
osd_layout 3 121 3 4 H
osd_layout 3 122 3 5 H
osd_layout 3 123 3 6 H
osd_layout 3 124 23 2 H# master
set looptime = 1000
set align_gyro = DEFAULT
set gyro_hardware_lpf = 256HZ
set gyro_anti_aliasing_lpf_hz = 250
set gyro_anti_aliasing_lpf_type = PT1
set moron_threshold = 32
set gyro_notch_hz = 0
set gyro_notch_cutoff = 1
set gyro_main_lpf_hz = 25
set gyro_main_lpf_type = BIQUAD
set gyro_use_dyn_lpf = OFF
set gyro_dyn_lpf_min_hz = 200
set gyro_dyn_lpf_max_hz = 500
set gyro_dyn_lpf_curve_expo = 5
set dynamic_gyro_notch_enabled = ON
set dynamic_gyro_notch_range = MEDIUM
set dynamic_gyro_notch_q = 250
set dynamic_gyro_notch_min_hz = 30
set gyro_abg_alpha = 0.000
set gyro_abg_boost = 0.350
set gyro_abg_half_life = 0.500
set vbat_adc_channel = 3
set rssi_adc_channel = 0
set current_adc_channel = 2
set airspeed_adc_channel = 1
set acc_notch_hz = 0
set acc_notch_cutoff = 1
set align_acc = DEFAULT
set acc_hardware = MPU9250
set acc_lpf_hz = 15
set acc_lpf_type = BIQUAD
set acczero_x = 62
set acczero_y = 25
set acczero_z = 26
set accgain_x = 4085
set accgain_y = 4084
set accgain_z = 4038
set rangefinder_hardware = NONE
set rangefinder_median_filter = OFF
set opflow_hardware = NONE
set opflow_scale = 10.500
set align_opflow = CW0FLIP
set imu2_hardware = NONE
set imu2_use_for_osd_heading = OFF
set imu2_use_for_osd_ahi = OFF
set imu2_use_for_stabilized = OFF
set imu2_align_roll = 0
set imu2_align_pitch = 0
set imu2_align_yaw = 0
set imu2_gain_acc_x = 0
set imu2_gain_acc_y = 0
set imu2_gain_acc_z = 0
set imu2_gain_mag_x = 0
set imu2_gain_mag_y = 0
set imu2_gain_mag_z = 0
set imu2_radius_acc = 0
set imu2_radius_mag = 0
set align_mag = CW90
set mag_hardware = MPU9250
set mag_declination = 0
set magzero_x = -79
set magzero_y = 32
set magzero_z = 96
set maggain_x = 288
set maggain_y = 285
set maggain_z = 311
set mag_calibration_time = 30
set align_mag_roll = 0
set align_mag_pitch = 0
set align_mag_yaw = 0
set baro_hardware = BMP280
set baro_median_filter = ON
set baro_cal_tolerance = 150
set pitot_hardware = NONE
set pitot_lpf_milli_hz = 350
set pitot_scale = 1.000
set receiver_type = SERIAL
set min_check = 1100
set max_check = 1900
set rssi_source = AUTO
set rssi_channel = 0
set rssi_min = 0
set rssi_max = 100
set sbus_sync_interval = 3000
set rc_filter_frequency = 50
set serialrx_provider = SBUS
set serialrx_inverted = OFF
set srxl2_unit_id = 1
set srxl2_baud_fast = ON
set rx_min_usec = 885
set rx_max_usec = 2115
set serialrx_halfduplex = AUTO
set blackbox_rate_num = 1
set blackbox_rate_denom = 1
set blackbox_device = SERIAL
set max_throttle = 1850
set min_command = 1000
set motor_pwm_rate = 400
set motor_accel_time = 0
set motor_decel_time = 0
set motor_pwm_protocol = STANDARD
set throttle_scale = 1.000
set throttle_idle = 5.000
set motor_poles = 14
set turtle_mode_power_factor = 55
set failsafe_delay = 5
set failsafe_recovery_delay = 5
set failsafe_off_delay = 200
set failsafe_throttle = 1000
set failsafe_throttle_low_delay = 0
set failsafe_procedure = RTH
set failsafe_stick_threshold = 50
set failsafe_fw_roll_angle = -200
set failsafe_fw_pitch_angle = 100
set failsafe_fw_yaw_rate = -45
set failsafe_min_distance = 0
set failsafe_min_distance_procedure = DROP
set failsafe_mission = ON
set align_board_roll = 0
set align_board_pitch = -2
set align_board_yaw = 0
set vbat_meter_type = ADC
set vbat_scale = 1100
set current_meter_scale = 250
set current_meter_offset = 0
set current_meter_type = ADC
set bat_voltage_src = RAW
set cruise_power = 0
set idle_power = 0
set rth_energy_margin = 5
set thr_comp_weight = 1.000
set motor_direction_inverted = OFF
set platform_type = AIRPLANE
set has_flaps = OFF
set model_preview_type = 8
set fw_min_throttle_down_pitch = 0
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set servo_protocol = PWM
set servo_center_pulse = 1500
set servo_pwm_rate = 50
set servo_lpf_hz = 20
set flaperon_throw_offset = 200
set tri_unarmed_servo = ON
set servo_autotrim_rotation_limit = 15
set reboot_character = 82
set imu_dcm_kp = 2500
set imu_dcm_ki = 50
set imu_dcm_kp_mag = 10000
set imu_dcm_ki_mag = 0
set small_angle = 180
set imu_acc_ignore_rate = 10
set imu_acc_ignore_slope = 0
set fixed_wing_auto_arm = OFF
set disarm_kill_switch = ON
set switch_disarm_delay = 250
set prearm_timeout = 10000
set applied_defaults = 3
set gps_provider = UBLOX
set gps_sbas_mode = AUTO
set gps_dyn_model = AIR_1G
set gps_auto_config = ON
set gps_auto_baud = ON
set gps_ublox_use_galileo = ON
set gps_min_sats = 6
set deadband = 5
set yaw_deadband = 5
set pos_hold_deadband = 10
set control_deadband = 10
set alt_hold_deadband = 50
set 3d_deadband_throttle = 50
set airmode_type = STICK_CENTER_ONCE
set airmode_throttle_threshold = 1300
set fw_autotune_min_stick = 50
set fw_autotune_ff_to_p_gain = 10
set fw_autotune_p_to_d_gain = 0
set fw_autotune_ff_to_i_tc = 600
set fw_autotune_rate_adjustment = AUTO
set fw_autotune_max_rate_deflection = 90
set inav_auto_mag_decl = ON
set inav_gravity_cal_tolerance = 5
set inav_use_gps_velned = ON
set inav_use_gps_no_baro = OFF
set inav_allow_dead_reckoning = OFF
set inav_reset_altitude = FIRST_ARM
set inav_reset_home = FIRST_ARM
set inav_max_surface_altitude = 200
set inav_w_z_surface_p = 3.500
set inav_w_z_surface_v = 6.100
set inav_w_xy_flow_p = 1.000
set inav_w_xy_flow_v = 2.000
set inav_w_z_baro_p = 0.350
set inav_w_z_gps_p = 0.200
set inav_w_z_gps_v = 0.100
set inav_w_xy_gps_p = 1.000
set inav_w_xy_gps_v = 2.000
set inav_w_z_res_v = 0.500
set inav_w_xy_res_v = 0.500
set inav_w_xyz_acc_p = 1.000
set inav_w_acc_bias = 0.010
set inav_max_eph_epv = 1000.000
set inav_baro_epv = 100.000
set nav_disarm_on_landing = OFF
set nav_use_midthr_for_althold = OFF
set nav_extra_arming_safety = ON
set nav_user_control_mode = ATTI
set nav_position_timeout = 5
set nav_wp_load_on_boot = OFF
set nav_wp_radius = 1500
set nav_wp_safe_distance = 10000
set nav_auto_speed = 300
set nav_auto_climb_rate = 500
set nav_manual_speed = 500
set nav_manual_climb_rate = 200
set nav_land_minalt_vspd = 50
set nav_land_maxalt_vspd = 200
set nav_land_slowdown_minalt = 500
set nav_land_slowdown_maxalt = 2000
set nav_emerg_landing_speed = 500
set nav_min_rth_distance = 500
set nav_overrides_motor_stop = ALL_NAV
set nav_rth_climb_first = OFF
set nav_rth_climb_ignore_emerg = OFF
set nav_rth_tail_first = OFF
set nav_rth_allow_landing = NEVER
set nav_rth_alt_mode = FIXED
set nav_rth_alt_control_override = OFF
set nav_rth_abort_threshold = 50000
set nav_max_terrain_follow_alt = 100
set nav_max_altitude = 0
set nav_rth_altitude = 7500
set nav_rth_home_altitude = 5000
set safehome_max_distance = 20000
set safehome_usage_mode = RTH
set nav_mc_bank_angle = 30
set nav_mc_hover_thr = 1500
set nav_mc_auto_disarm_delay = 2000
set nav_mc_braking_speed_threshold = 100
set nav_mc_braking_disengage_speed = 75
set nav_mc_braking_timeout = 2000
set nav_mc_braking_boost_factor = 100
set nav_mc_braking_boost_timeout = 750
set nav_mc_braking_boost_speed_threshold = 150
set nav_mc_braking_boost_disengage_speed = 100
set nav_mc_braking_bank_angle = 40
set nav_mc_pos_deceleration_time = 120
set nav_mc_pos_expo = 10
set nav_mc_wp_slowdown = ON
set nav_fw_cruise_thr = 1400
set nav_fw_min_thr = 1000
set nav_fw_max_thr = 1800
set nav_fw_bank_angle = 30
set nav_fw_climb_angle = 25
set nav_fw_dive_angle = 20
set nav_fw_pitch2thr = 20
set nav_fw_pitch2thr_smoothing = 6
set nav_fw_pitch2thr_threshold = 50
set nav_fw_loiter_radius = 6000
set nav_fw_cruise_speed = 0
set nav_fw_control_smoothness = 2
set nav_fw_land_dive_angle = 2
set nav_fw_launch_velocity = 200
set nav_fw_launch_accel = 1863
set nav_fw_launch_max_angle = 180
set nav_fw_launch_detect_time = 40
set nav_fw_launch_thr = 2000
set nav_fw_launch_idle_thr = 1200
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 100
set nav_fw_launch_spinup_time = 100
set nav_fw_launch_end_time = 3000
set nav_fw_launch_min_time = 2000
set nav_fw_launch_timeout = 10000
set nav_fw_launch_max_altitude = 5000
set nav_fw_launch_climb_angle = 25
set nav_fw_cruise_yaw_rate = 20
set nav_fw_allow_manual_thr_increase = OFF
set nav_use_fw_yaw_control = OFF
set nav_fw_yaw_deadband = 0
set telemetry_switch = OFF
set telemetry_inverted = OFF
set frsky_default_latitude = 0.000
set frsky_default_longitude = 0.000
set frsky_coordinates_format = 0
set frsky_unit = METRIC
set frsky_vfas_precision = 0
set frsky_pitch_roll = OFF
set report_cell_voltage = OFF
set hott_alarm_sound_interval = 5
set telemetry_halfduplex = ON
set smartport_fuel_unit = MAH
set ibus_telemetry_type = 0
set ltm_update_rate = NORMAL
set sim_ground_station_number =
set sim_pin = 0000
set sim_transmit_interval = 60
set sim_transmit_flags = 2
set acc_event_threshold_high = 0
set acc_event_threshold_low = 0
set acc_event_threshold_neg_x = 0
set sim_low_altitude = -32767
set mavlink_ext_status_rate = 2
set mavlink_rc_chan_rate = 5
set mavlink_pos_rate = 2
set mavlink_extra1_rate = 10
set mavlink_extra2_rate = 2
set mavlink_extra3_rate = 1
set mavlink_version = 2
set osd_telemetry = OFF
set osd_video_system = AUTO
set osd_row_shiftdown = 0
set osd_units = METRIC
set osd_stats_energy_unit = MAH
set osd_stats_min_voltage_unit = BATTERY
set osd_rssi_alarm = 35
set osd_time_alarm = 10
set osd_alt_alarm = 100
set osd_dist_alarm = 1000
set osd_neg_alt_alarm = 5
set osd_current_alarm = 0
set osd_gforce_alarm = 5.000
set osd_gforce_axis_alarm_min = -5.000
set osd_gforce_axis_alarm_max = 5.000
set osd_imu_temp_alarm_min = -200
set osd_imu_temp_alarm_max = 600
set osd_esc_temp_alarm_max = 900
set osd_esc_temp_alarm_min = -200
set osd_baro_temp_alarm_min = -200
set osd_baro_temp_alarm_max = 600
set osd_snr_alarm = 4
set osd_link_quality_alarm = 70
set osd_rssi_dbm_alarm = 0
set osd_temp_label_align = LEFT
set osd_ahi_reverse_roll = OFF
set osd_ahi_max_pitch = 20
set osd_crosshairs_style = DEFAULT
set osd_crsf_lq_format = TYPE1
set osd_horizon_offset = 0
set osd_camera_uptilt = 0
set osd_ahi_camera_uptilt_comp = OFF
set osd_camera_fov_h = 135
set osd_camera_fov_v = 85
set osd_hud_margin_h = 3
set osd_hud_margin_v = 3
set osd_hud_homing = OFF
set osd_hud_homepoint = OFF
set osd_hud_radar_disp = 0
set osd_hud_radar_range_min = 3
set osd_hud_radar_range_max = 4000
set osd_hud_radar_nearest = 0
set osd_hud_wp_disp = 0
set osd_left_sidebar_scroll = NONE
set osd_right_sidebar_scroll = NONE
set osd_sidebar_scroll_arrows = OFF
set osd_main_voltage_decimals = 1
set osd_coordinate_digits = 9
set osd_estimations_wind_compensation = ON
set osd_failsafe_switch_layout = OFF
set osd_plus_code_digits = 11
set osd_plus_code_short = 0
set osd_ahi_style = DEFAULT
set osd_force_grid = OFF
set osd_ahi_bordered = OFF
set osd_ahi_width = 132
set osd_ahi_height = 162
set osd_ahi_vertical_offset = -18
set osd_sidebar_horizontal_offset = 0
set osd_left_sidebar_scroll_step = 0
set osd_right_sidebar_scroll_step = 0
set osd_sidebar_height = 3
set osd_home_position_arm_screen = ON
set osd_pan_servo_index = 0
set osd_pan_servo_pwm2centideg = 0
set osd_speed_source = GROUND
set i2c_speed = 400KHZ
set debug_mode = NONE
set throttle_tilt_comp_str = 0
set name = AR WING CLASSIC
set mode_range_logic_operator = OR
set stats = OFF
set stats_total_time = 0
set stats_total_dist = 0
set stats_total_energy = 0
set tz_offset = 0
set tz_automatic_dst = OFF
set display_force_sw_blink = OFF
set vtx_halfduplex = ON
set vtx_smartaudio_early_akk_workaround = ON
set vtx_band = 4
set vtx_channel = 1
set vtx_power = 1
set vtx_low_power_disarm = OFF
set vtx_pit_mode_chan = 1
set vtx_max_power_override = 0
set log_level = ERROR
set log_topics = 0
set smartport_master_halfduplex = ON
set smartport_master_inverted = OFF
set dji_workarounds = 1
set dji_use_name_for_messages = ON
set dji_esc_temp_source = ESC
set dshot_beeper_enabled = ON
set dshot_beeper_tone = 1
set limit_cont_current = 0
set limit_burst_current = 0
set limit_burst_current_time = 0
set limit_burst_current_falldown_time = 0
set limit_cont_power = 0
set limit_burst_power = 0
set limit_burst_power_time = 0
set limit_burst_power_falldown_time = 0
set limit_pi_p = 100
set limit_pi_i = 100
set limit_attn_filter_cutoff = 1.200# profile
profile 1set mc_p_pitch = 40
set mc_i_pitch = 30
set mc_d_pitch = 23
set mc_cd_pitch = 60
set mc_p_roll = 40
set mc_i_roll = 30
set mc_d_roll = 23
set mc_cd_roll = 60
set mc_p_yaw = 85
set mc_i_yaw = 45
set mc_d_yaw = 0
set mc_cd_yaw = 60
set mc_p_level = 20
set mc_i_level = 15
set mc_d_level = 75
set fw_p_pitch = 10
set fw_i_pitch = 15
set fw_d_pitch = 0
set fw_ff_pitch = 70
set fw_p_roll = 5
set fw_i_roll = 8
set fw_d_roll = 0
set fw_ff_roll = 35
set fw_p_yaw = 20
set fw_i_yaw = 5
set fw_d_yaw = 0
set fw_ff_yaw = 100
set fw_p_level = 20
set fw_i_level = 5
set fw_d_level = 75
set max_angle_inclination_rll = 450
set max_angle_inclination_pit = 300
set dterm_lpf_hz = 40
set dterm_lpf_type = BIQUAD
set dterm_lpf2_hz = 0
set dterm_lpf2_type = BIQUAD
set yaw_lpf_hz = 0
set fw_iterm_throw_limit = 165
set fw_loiter_direction = RIGHT
set fw_reference_airspeed = 1500.000
set fw_turn_assist_yaw_gain = 1.000
set fw_turn_assist_pitch_gain = 0.200
set fw_iterm_limit_stick_position = 0.500
set fw_yaw_iterm_freeze_bank_angle = 0
set pidsum_limit = 500
set pidsum_limit_yaw = 350
set iterm_windup = 50
set rate_accel_limit_roll_pitch = 0
set rate_accel_limit_yaw = 10000
set heading_hold_rate_limit = 90
set nav_mc_pos_z_p = 50
set nav_mc_vel_z_p = 100
set nav_mc_vel_z_i = 50
set nav_mc_vel_z_d = 10
set nav_mc_pos_xy_p = 65
set nav_mc_vel_xy_p = 40
set nav_mc_vel_xy_i = 15
set nav_mc_vel_xy_d = 100
set nav_mc_vel_xy_ff = 40
set nav_mc_heading_p = 60
set nav_mc_vel_xy_dterm_lpf_hz = 2.000
set nav_mc_vel_xy_dterm_attenuation = 90
set nav_mc_vel_xy_dterm_attenuation_start = 10
set nav_mc_vel_xy_dterm_attenuation_end = 60
set nav_fw_pos_z_p = 20
set nav_fw_pos_z_i = 5
set nav_fw_pos_z_d = 5
set nav_fw_pos_xy_p = 50
set nav_fw_pos_xy_i = 5
set nav_fw_pos_xy_d = 8
set nav_fw_heading_p = 60
set nav_fw_pos_hdg_p = 30
set nav_fw_pos_hdg_i = 2
set nav_fw_pos_hdg_d = 0
set nav_fw_pos_hdg_pidsum_limit = 350
set mc_iterm_relax = RP
set mc_iterm_relax_cutoff = 15
set d_boost_factor = 1.000
set d_boost_max_at_acceleration = 7500.000
set d_boost_gyro_delta_lpf_hz = 80
set antigravity_gain = 1.000
set antigravity_accelerator = 1.000
set antigravity_cutoff_lpf_hz = 15
set pid_type = AUTO
set mc_cd_lpf_hz = 30
set setpoint_kalman_enabled = OFF
set setpoint_kalman_q = 100
set setpoint_kalman_w = 4
set setpoint_kalman_sharpness = 100
set fw_level_pitch_trim = 0.000
set smith_predictor_strength = 0.500
set smith_predictor_delay = 0.000
set smith_predictor_lpf_hz = 50
set fw_level_pitch_gain = 5.000
set thr_mid = 50
set thr_expo = 0
set tpa_rate = 0
set tpa_breakpoint = 1500
set fw_tpa_time_constant = 0
set rc_expo = 30
set rc_yaw_expo = 30
set roll_rate = 18
set pitch_rate = 9
set yaw_rate = 3
set manual_rc_expo = 70
set manual_rc_yaw_expo = 20
set manual_roll_rate = 100
set manual_pitch_rate = 100
set manual_yaw_rate = 100
set fpv_mix_degrees = 0# battery_profile
battery_profile 1set bat_cells = 0
set vbat_cell_detect_voltage = 425
set vbat_max_cell_voltage = 425
set vbat_min_cell_voltage = 280
set vbat_warning_cell_voltage = 300
set battery_capacity = 0
set battery_capacity_warning = 0
set battery_capacity_critical = 0
set battery_capacity_unit = MAH# end the command batch
batch end -
Pamiętaj.
Fox nie lubi małych prędkości.
Powiedzenia
-
1
-
-
Ja mam orginalne plany.
Moge podeslac
-
Watpie aby nabyl go na demobilu.
Raczej zostal znaleziony i teraz jest sprzedawany.
Ciekawy jestem czy znajdzie chetnego
-
Widzę ze ktos sprzedaje ITWL: Cele powietrzne dla wojska.
http://allegro.pl/samolot-zdalnie-sterowany-spalinowy-i6806686195.html#thumb/2
Z tego co mi wiadomo, jeśli to znalazł, to powinien zgłosić to na policje, a tym bardziej że to sprzęt wojskowy.
Widać ze model ma wystrzelony spadochron, a osoba która znalazła mieszka w nad morzem gdzie jest poligon wojskowy.
Ciekawe czy mu coś grozi.
Jak myślicie ?
-
Witajcie.
Ojj tam wsparcie, przecież my Polacy ;] Kopać leżącego ;]
A tak na serio już się naprawia ;]
Najgorsze pęknięcie przy końcu kadłuba gdzie jest SK, ale już to przerabiałem.
Jak zrobię zapodam fotki, a przy okazji dostanie normalne białe barwy ;]
A śmiejta się do końca ;]
-
1
-
-
No niestety zachodzące słońce nie jest sprzymierzeńcem modelarza.
Ważne że model się naprawia.
-
Witam.
Po dłuższej przerwie, znowu zacząłem latać.
Niby człowiek wie, a jednak popełnił karygodny błąd.
Nie będę pisał jaki, oceńcie sami.
Powiem że godz była ok 19:00.
Zdjęcie chyba podpowie dużo.
A to zdjęcie powinno wszystko wyjaśnić.
Ehh i znowu będzie trzeba naprawiać.
-
Poleciec poleci
Tylko dlugi start.
Mi moze uda siebw tym sezonie ukonczyc model i go ulotnic, ale strasznego parcia.
3 mam kciuki przy oblocie no i na filmik
-
Dla mnie bombaWitam.
A co koledzy powiedzą na coś takiego????
Te polskie konstrukcje proste a zarazem bardzo ladne.
Silnik daje rade ?
Latales czy na razie model uziemiony
-
Fotki dał ci tylko muszę poszukać gdzie je mam , na Yutub jest film gdzie widać wydech
Witam.
Widzialem ten filmik.
Z tlumikiem bede walczyl jak dorwe material.
Takie detale to na koniec.
Najwazniejsze to musze dokonczycz skrzydla, pomalowac model, itp.
Niby prosta konstrukcja, proste ksztalty a jednak cos pieknego w tym modelu jest
-
Piękna robota!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Można prosić kilka fotek???
Dzięki bardzo.
Wracam z powrotem do modelarstwa i tak padło na Prząśniczkę J-1.
Model idzie bardzo mozolnie ale nie mam strasznego parcia ;] ważne że budowa sprawia mi dużoooo przyjemności.
P.S.
radziu45 można prosić fotki bo widzę konstrukcja jest dość mało popularna, a ciekawi mnie parę rozwiązań ;]
Wydech był początkowo dwa do dołu a póżniej jeden w górę .
Zobaczymy czy ten się sprawdzi.
Sam lutowałem z aluminum, bo na oryginalnym musiał bym dużo ciąć, a nie ukrywajmy staram się teraz pilnować wagi żeby nie wyszła cegła.
Choć ten model ma latać MAKIETOWA, długi rozbieg i powoli do góry ;]
-
Witam.
Wlasnie jestem w trakcie budowy tego modelu, tzn nie spiesze sie ale juz cos tam powstalo.
Model buduje z planow pana Lecha Podgorskiego.
Rozpietosc 2533 mm
Silnik orginalnie to 6.5 - 10 cc.
U mnie bedzie silnik ASP 75 poj. 12.4 cc.
Zawsze podobal mi sie ten model i dlatego za niego sie wziolem.
Czy ulotnie go ciezko powiedziec ale bede mial go w swoim zbiorze.
-
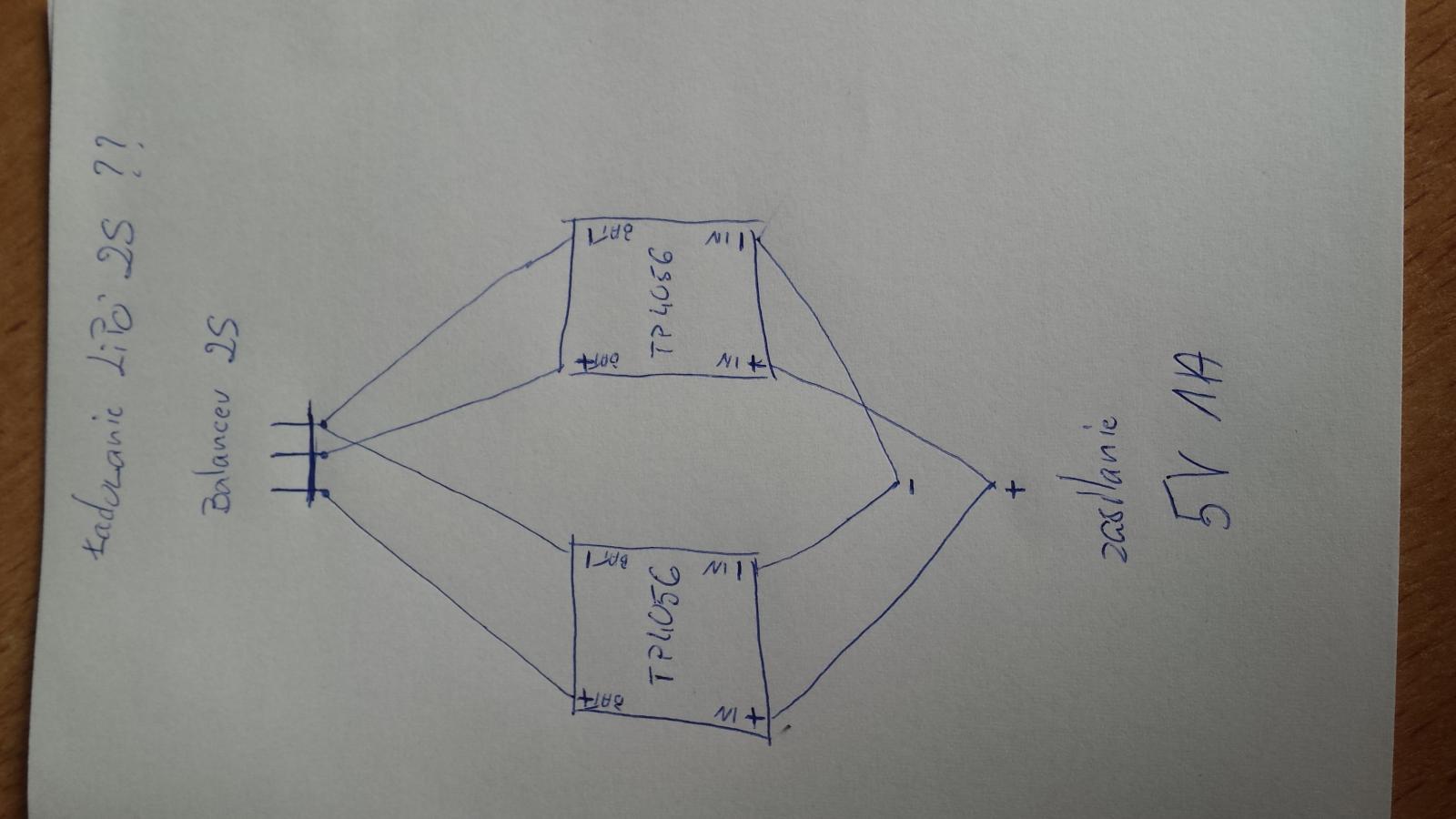
Witam.
Potrzebuje prostej ladowarki do lipo 2s.
Mam moduly TP4056.
Czy moje myslenie podlaczenia jest dobre.
Moze ktos spojrzec i ewentualnie skorygowac.
-
Muszę stwierdzić- BeZeDUuuRA kolego, tylko efekt dźwiękowy dochodzi ...
Pomagałem dzisiaj przy odpaleniu silnika, regulacji, i oblocie.
Kolega wcześniej latał tylko modelem typu Bixler, pianka EPO napędzana małym silniczkiem pchającym.
Teraz przesiadł się na trenerka ok.1500mm rozpiętości, silnik 10cc żarówka.
Jeśli twierdzisz że latanie żarówkami to tylko efekt dźwiękowy, to witki mi odpadają.
To już troszkę inna szkoła latania, ale OK, nie będę dyskutował.
Najwyraźniej moje doświadczenie jest małe.
Aż się uśmiałem ;]
-
-
Silnik chodzi normalnie.
Odpalanie w druga strone jest to normalna metoda odpalania
Tak mi zostalo przekazane i potwierdzam ta metode
Duzo lepiej mi sie odpala w ten sposob silniki zarowe
Silnik odpalasz w przeciwnym kierunku.
On w ulamku sekundy przeskakuje i pracuje juz normalnie.
Tak samo jest jak odpalisz silnik i zlapie zle obroty to co robisz
Zatykasz rure wydechowa az sie przydlawi i w ulamku sekundy dostaje juz normalnych obrotow.
Za to kocham zarowki ze nie sa dla idi.... (bez obrazy) oraz ze ucza cierpliwosci i poglebiania wiedzy. I za to ze jak wpadniesz w rutyne przy odpalaniu to dostaniesz po lapach
-
Witam.
Sam kiedyś posiadałem MDS 61 w swoim FunFly 1600mm i model latał jak oszalały.
Nie było zawisów na śmigle, ale popier..... aż miło.
Ciężko było silnik wyregulować, odnośnie przejścia, i trzeba było iść na kompromis, albo niskie obroty, albo wysokie.
Silnik pracował z tłumikiem od GMS 15cc, i robił furorę w powietrzu, ćwiek niesamowity ;]
Bardzo milo wspominam model wraz z silnikiem ;]
Jeśli ktoś twierdzi ze silnik MDS to badziewie, to albo ma mała wiedzę o silnikach Nitro, ale niech zakupi sobie napęd elektryczny ;]
-
BRAWO dla ludzi pokroju Marcina.
Pewnie że można kupić u chińczyka, ale często tani towar działa krótko.
Wolę wspomóc Polskiego modelarza, bo wiem że zrobi dokładnie ;]
BRAWO ;]









[S] Aparatura FS-TH9X + FrSky DJT 2,4GHz ACCST
w Giełda modelarska
Opublikowano
Sprzedane