PioDabro
-
Postów
268 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez PioDabro
-
Cóż, na razie ograniczmy się do samego brzęczyka, tylko zakładam, że najlepiej by było, jakby sygnalizował nie poziom rozładowania tylko chwilę przed, żeby można było spokojnie wrócić jak zacznie piszczeć. Warto by było poznać krzywą rozładowania typowego żelowego aku, żeby sprawdzić kiedy powinna nastąpić sygnalizacja, żeby zostało jeszcze trochę energii na powrót.
-
Jutro coś wykombinuje prostego i skutecznego. A wpadł mi do głowy kolejny pomysł. Miernik Wi-Fi który będzie na bieżąco wyświetlał napięcie i możliwe inne paretry w telefonie Taka swoista telemetria zanętowa:) Można nawet pójść krok dalej i sterować taką łódkę z telefonu Kwestia jaką odległość chce się uzyskać, ale jeżeli w zasięgu wzroku to raczej bezproblemowo Wi-Fi wystarczy Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Heh, ciekawe jaki popyt by był na dedykowane urządzonko które jest jak najbardziej zminimalizowane, czyli tylko buzer i scalaczek który będzie mierzył napięcie. W sumie urządzonko mega proste do zrobienia (analogowe jak i cyfrowe). Jedynie kalibracja bez wyświetlacza była by trudniejsza do wykonania, ale raz wykalibrowane urządzenie nie będzie potrzebowało zbytniej poprawki, więc można to robić "programowo". Może niedługo coś naskrobię dla potomnych, układ prosty na Attiny13 w wersji SMD i pomiar ADC z dzielniczkiem napięcia. Te sprzedawane na allegro i innych brzęczyki są mega niedokładne, słabo skalibrowane, zbalancowana bateria ma 3 różne odczyty na nim, a na multimetrze napięcia równiutkie.
-
Może zanurzyć w tzw. "folii w płynie". Dostępna w każdym markecie budowlanym. Kiedyś używałem takiej firmy dragon, ale w celach budowlanych , była przezroczysta. Wiem że są też kolorowe. Pytanie jak to będzie współpracować z elektroniką.
-
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
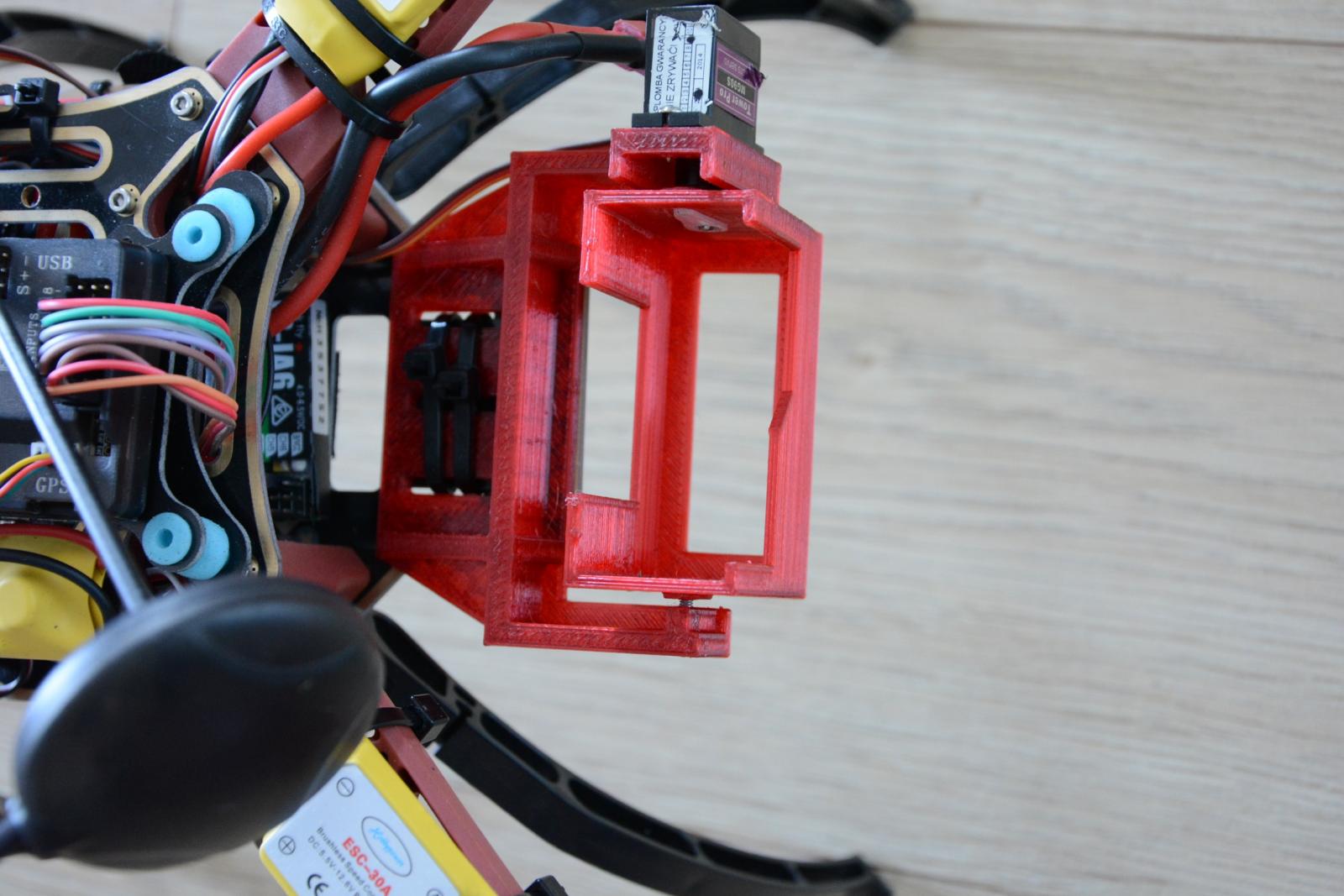
Dokładnie, osłony i gimbal se wydrukowałem Ten temat jest w sumie tematem o mojej maszynce, od początku jak przyszedł z Chin zestaw. Dobry jako baza, ale wymaga paru zmian żeby dało się tym spokojnie latać, największą wadą są piasty śmigieł, ale poczytajcie inne tematy o tym dużo było o tym mówione. No i mała pomyłka, osłona jedna waży 20 gram, a komplet 80 gram. Poprawiłem już zdanie wcześniej. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Ostanio i jak zakupiłem sobie tego multistara i jestem zadowolony. Długości lotu nie mierzyłem bo w sumie to robię krótsze przeloty wiele razy, ale sporo wytrzymuje. Mój waży w całości z kamerką i osłonami 1,5kg same osłony sporo zjadają bo komplet waży 80gram, ale swoje zadanie spełniają znakomicie. Jedną już nawet połamałem, ale za to w kopterze strat nie ma żadnych. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Cóż, mocowanie jest bez żadnego tłumienia drgań. Film wychodzi trochę drgający, ale jak na taki sposób mocowania i zerowe wyważenie śmigieł(założyłem prosto z paczki) to wychodzi ładnie. Później wrzucę filmik z lotu -
Problem z uzbrojeniem quadcoptera Quanum Nova CX - 20
PioDabro odpowiedział(a) na TheLukLuk21 temat w Multikoptery
http://www.n3kl.org/sun/noaa.html Dziś burza geomagnetyczna -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
A ja zrobiłem se gimbalek 1 osiowy na serwie 9g, sterowany z APM: Do tego ponieważ dopiero zacząłem pilotować i już małe wypadki były zrobiłem se osłony na śmigła. Bardzo dobrze sprawują się przy nierównym terenie, gdzie przy lądowaniu zdarza się, że kopter może się przewrócić. Wtedy zamiast orać śmigłami ziemię maszyna opiera się na osłonach, a my możemy spokojnie przełączyć na stabilize i rozbroić. Polecam. A całość wygląda tak:
-
Problem z uzbrojeniem quadcoptera Quanum Nova CX - 20
PioDabro odpowiedział(a) na TheLukLuk21 temat w Multikoptery
Ehhh, panowie czytaliście co napisałem wcześniej? To jest sterownik APM, więc przez mission planera wgrajcie najnowszy dostępny soft przez USB. Żeby wyczyścić błedne ustawienia nie wystarczy wgranie softu, bo ustawienia zostają w innej pamięci. Żeby wyczyścić ustawienia to CONFIG/TUNING - > Full Parameter Tree znajdziecie Save to file (zapisanie bieżących do pliku - żeby móc odtworzyć jak coś się zjeb....) a potem Reset to Default. Albo wgrajcie soft np. Rover a potem znów Copter (to bardziej radykalne rozwiązanie). Potem po kolei lecicie Initial Setup, i albo korzystacie w Wizard'a albo po kolei ręcznie każdą zakładkę z Mandatory Hardware. Frame type -> pewnie X w waszym przypadku. Accel Calibration -> tutaj guzik Calibrate Accel i po kolei czytać co pisze ustawiać drona i klikać dalej. Da się do zrobić z kablem USB wpiętym. Compass -> nie wiem jak u Was jest kompas umiejscowiony, ale zakładam że ROTATION_NONE, najlepiej kliknąć guzik APM2.5(Internal Compass) i samo się poustawia. Potem robicie Live Calibration, na kabelku da się to zrobić. Ja to robię tak: 1. Trzymam kopter poziomo i obracam nim wokół osi skierowanej do nieba. 2. Trzymam kopter przekrony o 90 stopni i kręce wokół osi poziomej. 3. Trzymam kopter do góry nogami i znów obracam wokół osi skierowanej w dół. W ten sposób zapełnić powinniście wszystkie białe kropki. Kalibracja sama się zakończy jak będzie miała odpowiednią ilość punktów. Radio -> odpalacie i machacie drążkami i przełącznikami itd... ESC można zrobić bez mp i tak polecam. Flight modes wedle uznania. FailSafe też. Do roboty -
Problem z uzbrojeniem quadcoptera Quanum Nova CX - 20
PioDabro odpowiedział(a) na TheLukLuk21 temat w Multikoptery
W środku siedzi APM więc musicie zrobić pełną kalibrację przed jakimkolwiek lataniem. Zakładka Initial Setup i po kolei. Zacznijcie od Accelerometer Setup i kalibrację robicie po naciśnięciu górnego guzika. Tego dolnego nie ruszajcie. Po kalibracji akcelerometru będzie miał już poziom. Dalej trzeba skalibrowac po kolei kompas, radio, silniki (tutaj radzę odkręcić śmigła) itd. Poczytajcie sobie co i jak na stronie ArduCopter'a. Po zrobieniu kalibracji poprawnie model jest gotowy do lotów. Kolejne kalibracje będą potrzebne wówczas tylko wtedy gdy coś znów będzie nie tak. PS Najlepiej zdjąć śmigła przed wszystkimi kalibracjami i założyć dopiero przed lotem. To jest ważne, chyba że lubicie mieć pociachane rączki i zdemolowaną chate. Wysłane z mojego Nexus 4 przy użyciu Tapatalka -
Roztrzaskany tylnik wirnik w FQ 777 Tyranosaur
PioDabro odpowiedział(a) na Adekrc temat w Multikoptery
Sterownik reguluje predkosc silnika ogona do takiej aby wyrownac do poziomu więc drobne raczej różnice nie powinny mieć świerkowego wpływu. Wysłane z mojego Nexus 4 przy użyciu Tapatalka -
Roztrzaskany tylnik wirnik w FQ 777 Tyranosaur
PioDabro odpowiedział(a) na Adekrc temat w Multikoptery
Po pierwsze nie ten dział. Po drugie 5 minut zajęło mi znalezienie śmigła na allegro: http://archiwum.allegro.pl/oferta/syma-fq777-6cm-smiglo-ogona-tylne-ogonowe-i5672444804.html jest niby do Symy, ale to praktycznie to samo A teraz poświęć chwilę czasu i poszukaj pozostałych części. Sprawdź czy nie podpasują jeszcze części od Syma S032, rozmiarami podobna. Np cały ogon od symy. -
Zestaw z Chin - Quadcopter F450 z APM2.6 - relacja
PioDabro odpowiedział(a) na PioDabro temat w Multikoptery
Myślę że 60 - 70 stopni nie powinno na nich zrobić wrażenia. Mi właśnie przyszły te APC, ale jeszcze nie testowałem. Polatałem za to na HQProp i jak za tą cenę to rewelka Nawet raz zaorałem nimi pole (nie udane lądowanie z przewrotką na plecy). Poza bardzo drobnymi wyszczerbieniami nic im się nie stało, a potem jeszcze długo na nich latałem. Silniki mam takie: Żeby dobrze do nich śmigło przymocować to rozwierciłem dziury w śmigłach żeby dało się nałożyć do końca piasty. Na to nakrętka ładnie wchodzi, sporo gwintu połyka i dobrze dokręca. PS. znalezisko na Ali: http://www.aliexpress.com/item/10-4-5-Carbon-Fiber-Propellers-Props-CW-CCW-1045-For-RC-Multi-Copter-Hot-Selling/32579956056.html?spm=2114.13010308.0.48.ZOkAnc 4.68$ za parę karbonów to niezła cena, ciekawe jak się by sprawowały. Kto testuje? PS 2. wersja 10x4.7 http://www.aliexpress.com/item/1-Pair-10x4-7-Carbon-Fiber-Propeller-Prop-CW-CCW-1047-for-RC-Multi-Copter/32607619070.html?spm=2114.13010308.0.60.ZOkAnc jeszcze taniej: 4.16$ za parę.
-
A jak kompas?
-
To może zrób mu pełen reset. Wyczyść ustawienia i wgraj na nowo firmware. Potem krok po kroku skalibruj od nowa. I jak masz lutownicę z cienkim grotem to popraw te luty podgrzewając każdą nóżkę osobno.
-
No to jest to ewidentny problem z połączeniem z kompasem. Jak umiesz SMD lutować o możesz spróbować poprawić gniazdo od I2C w APM może jakiś lut jest do bani.
-
Wklejony wcześniej obrazek powinien Ci wszystko wyjaśnić. Ale tak. Jak masz JP1 założone to albo ESC albo PM (nigdy naraz). Jak masz JP1 zdjęte to PM zasili APM a ESC serwa. Z tym że niezalecane jest zasilanie serw z tego samego źródła co zasila APM. Więc zdejmij JP1. APM zasil z Power Module a serwa z ESC. To będzie najlepsze rozwiązanie. Sprawdź też jakie napięcie daje PM i czy można je regulować. Jeżeli tak, to odłącz PM od kontrolera, zasil z baterii i ustaw 5.37V. Co do kompasu to sprawdź na czym go montujesz. Każdy stalowy element w pobliżu kompasu spowoduje właśnie problemy z kalibracją, duże offsety i lipne działanie. Na innym APM sprawdzales przekładając do innego drona? Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Patrząc po schemacie linii zasilania to PM powinien zasilać wyjścia. Z wtyczek od ESC wypnij koniecznie przewody +. (Środkowe) Jak je zostawisz to możesz coś spalić bo ESC daje niższe napięcie niż PM(Power Module nominalnie daje 5.37V co jest najlepszą wartością). A zasilanie serw możesz dać z tych wypietych z ESC kabelków. Z ESC do APM zostawiasz podłączoną masę i sygnał. Z serwa masę wpinasz w wolne output, sygnał tam gdzie trzeba, a + do + z ESC. No chyba że masz zdjęte JP1 to wtedy możesz podłączać ESC bez wyjmowania pinów, a zasilanie serw brać z outputs. Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Taką mam: https://botland.com.pl/przetwornice-step-down/2967-przetwornica-step-down-lm2596-15v-35v-3a.html Link przykładowy. Wpisz w Allegro LM2596 to znajdziesz ją jeszcze taniej, można też ściągnąć z Chin, ale nie wiem czy opłaca się miesiąc czekać dla 2 złotych oszczędności. Po wylutowaniu z niej potencjometru, można zamiast niego podlutować rezystory SMD ustalając na sztywno napięcie (wtedy nie ma szans że się jakimś cudem przestawi).
-
Można też wyjąć piny + z tych kabelków od ESC Ja zasilam z przetworniczki gdzie rezystorami ustawiłem na sztywno 5.3V przez wolne złącze output.(Tylko + i masa i zworka założona) Power Module niby fajne z pomiarem prądu i napięcia baterii, ale ludzie narzekają na nie. Jak dla mnie moje rozwiązanie jest najlepsze. W moim temacie o F450 z Chin jest to opisane. Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Z tego co znalazłem to APM 2.8 ma gniazdo kompasu przeniesione pod UART GPSu(ale dalej jest to gniazdo I2C) natomiast stare gniazdo pozostało do podłączania innych urządzeń. W wersji 2.6 jest tylko jedno gniazdo I2C i tam wpina się kompas. Jak nie działa to problemy szukał bym w przewodach łączących lub zasilaniu. Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
A na pewno działa? Bo raczej przy braku kompasu nie będzie zgłaszał błędu "bad compass health". Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Cóż jeżeli zasilasz przez zworke to musisz dać nieco większe napięcie niż 5V. BEC z ESC daje równe 5V. Przy zasilaniu przez wyjścia (przez zworkę) po drodze jest dioda na której następuje spadek napięcia. Przy zasilaniu przez zworkę należy podać napięcie 5.3V (dokładnie to 5.37, ale 5.3 też działa dobrze). Dopiero podniesienie napięcia u mnie poprawiło działanie czujników. Wcześniej mailem problemy z żyro i kompasem "bad compass health". Tylko nie można przesadzić bo spalisz APM. 5.3V jest bezpieczne. Wysłane z mojego Nexus 4 przy użyciu Tapatalka
-
Kompas nie będzie działał przez złącze UART. Nawet na zdjęciu wrzuconym wyzej widać linie SDA i SCL od I2C. To są właśnie te dwa przewody od kompasu. W APM 2.6 jest tylko jedno złącze i2c koło złącza Power Module po lewej na dole. Jak tak podłączony moduł nie działa to coś jest nie tak z połączeniem(kable i wtyczki). Zadałem wcześniej pytanie o to czym i jak zasilasz APM, bo to może być ważne. Co do całego modułu GPS, to jedna wtyczka ta szersza to UART dla GPS oraz zasilanie całego modułu, a ta węższa to tylko linie danych i2c od kompasu. Z tego co patrzę to APM 2.8 także ma tylko jeden port i2c także przy złączu PM. I tam musi być wpięty kompas. Ta drugie gniazdo pod gniazdem GPS to ten sam UART tylko w innej konfiguracji pinów. Wpięcie tam wtyczki od kompasu jest błędem, który może doprowadzić do jego uszkodzenia. Wysłane z mojego Nexus 4 przy użyciu Tapatalka