Hincek
-
Postów
121 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez Hincek
-
Nie testowałem u siebie, ale słyszałem że jest problem rozjechanych wszystkich jednostek miar. np jak chcę usłyszeć mah to trzeba wybrać jednostkę ft = stopa itd, trzeba szukać.
-

Dubai 210mm Mini Carbon Racing Quadcopter – relacja z budowy
Hincek odpowiedział(a) na Hincek temat w Multikoptery
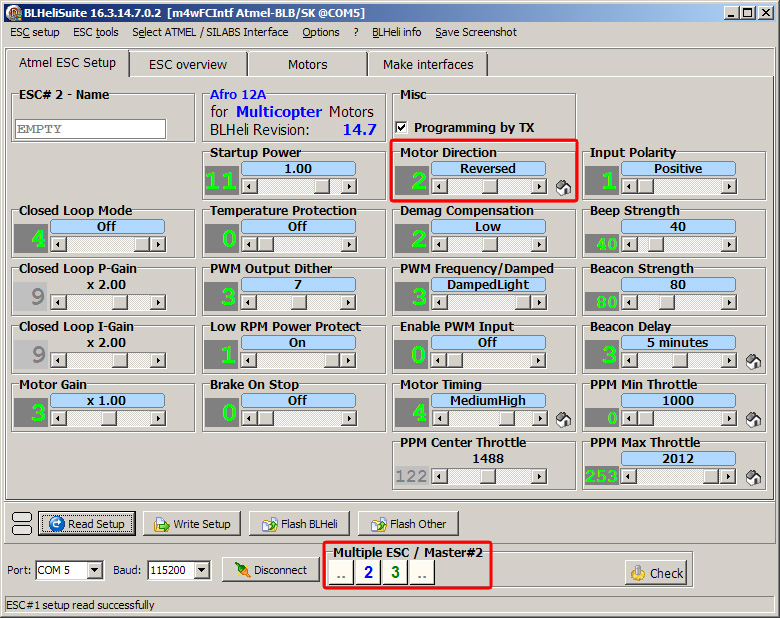
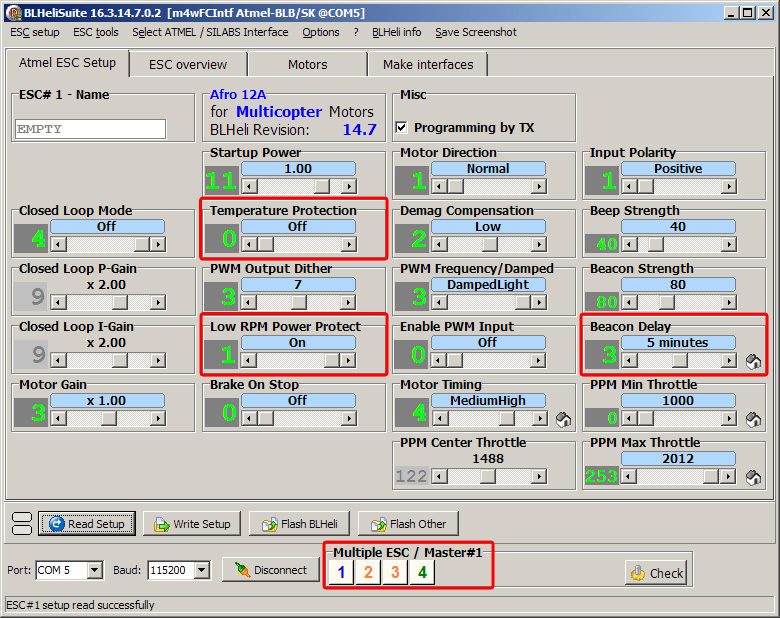
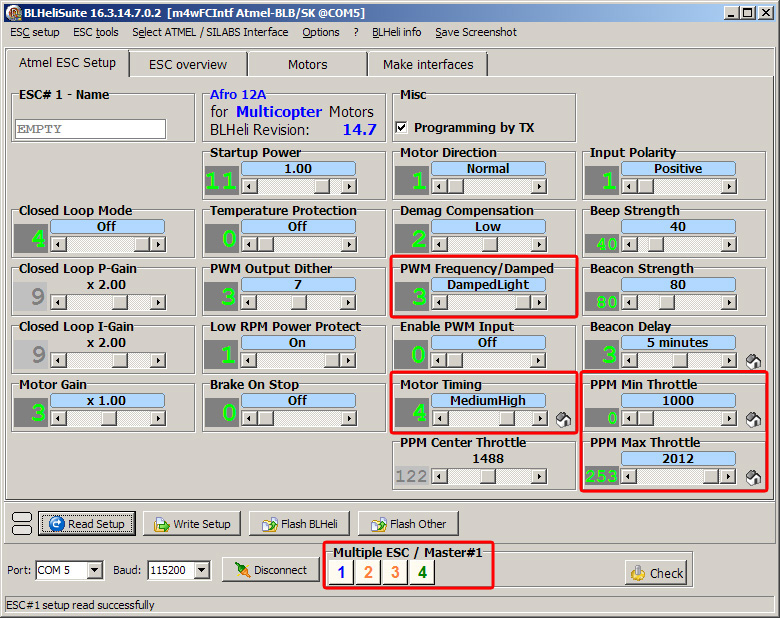
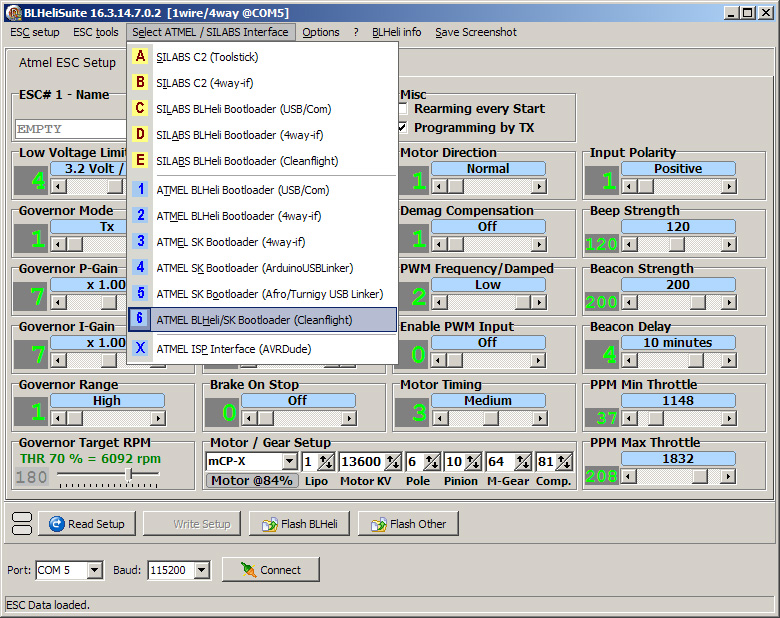
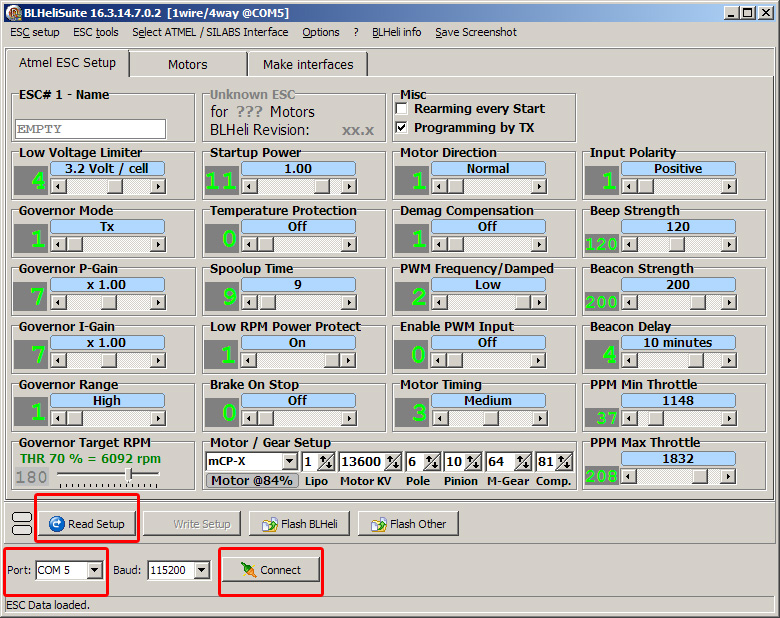
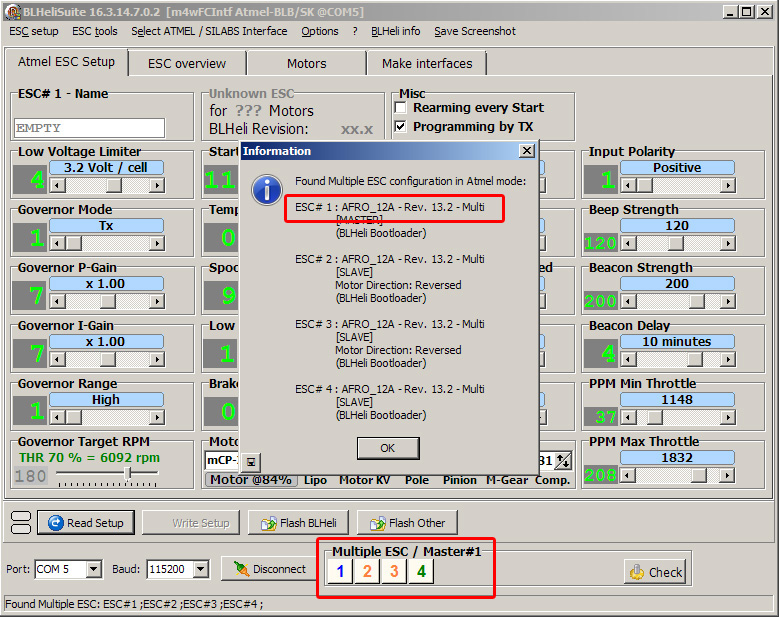
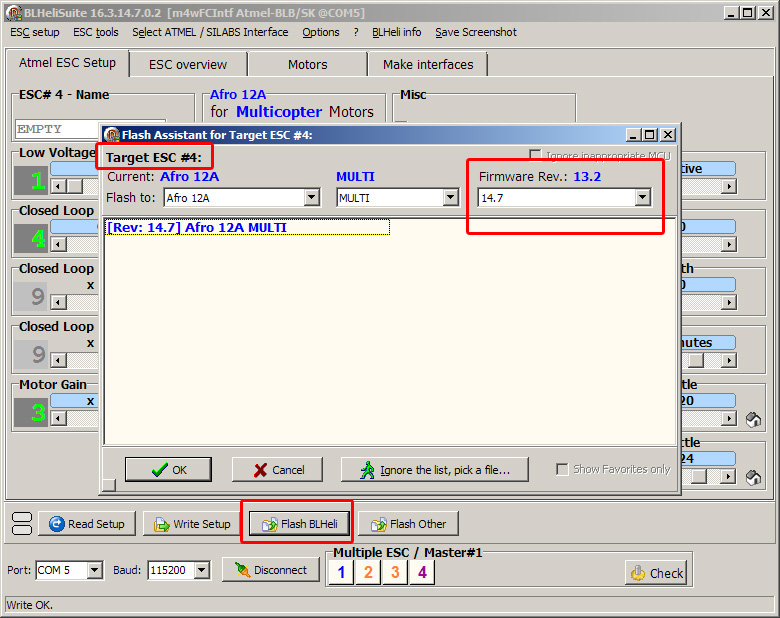
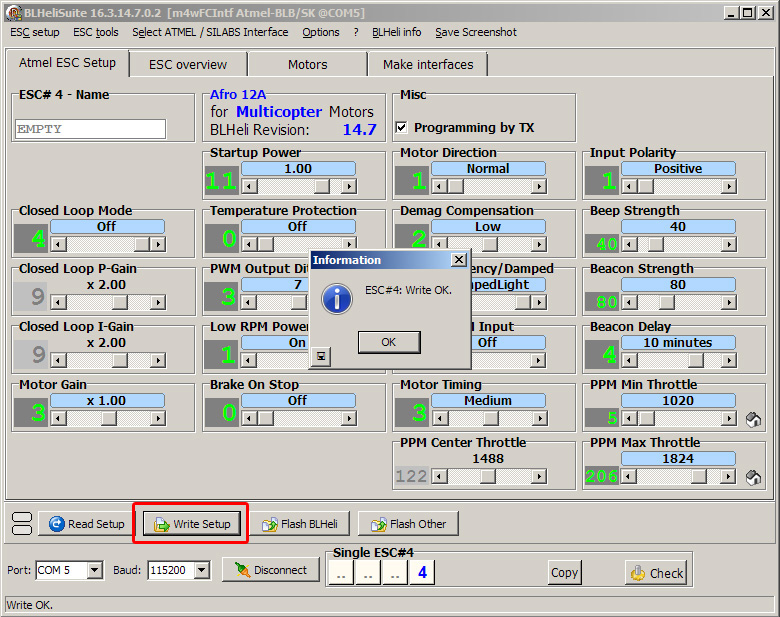
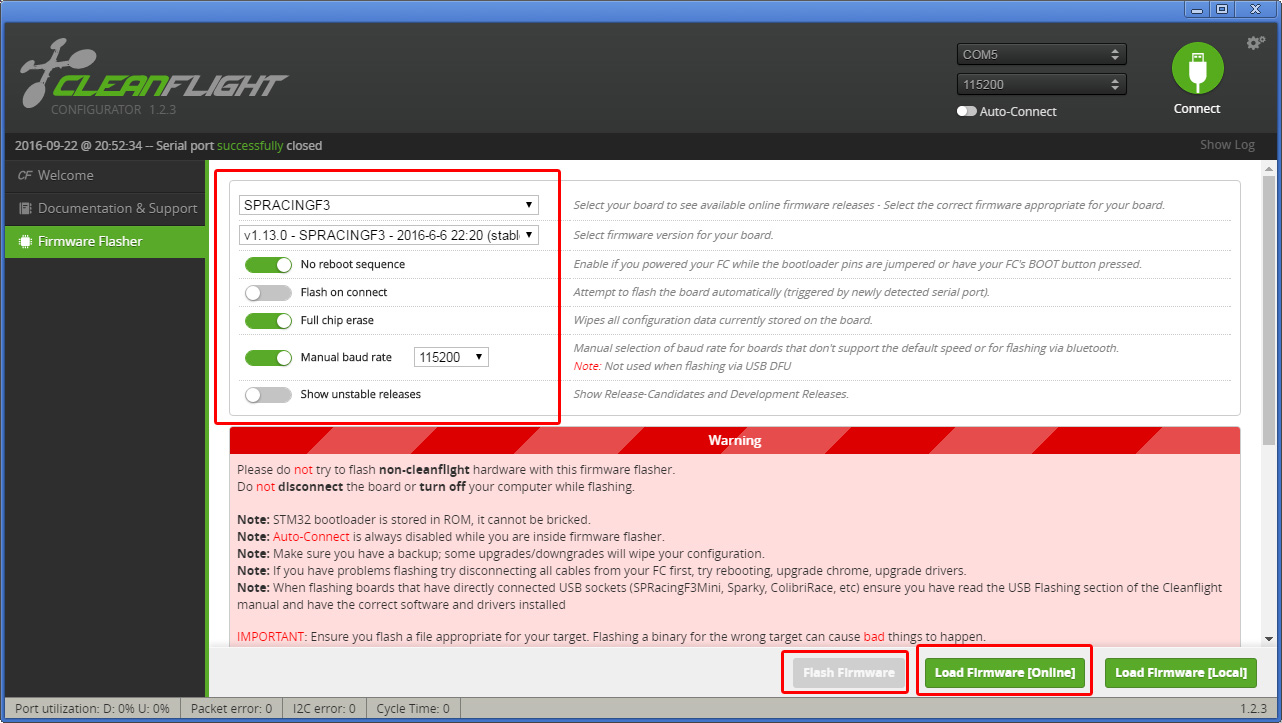
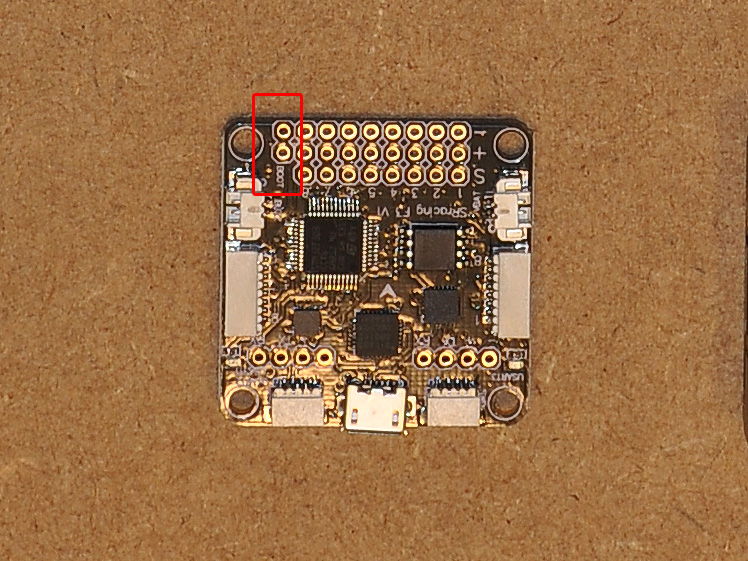
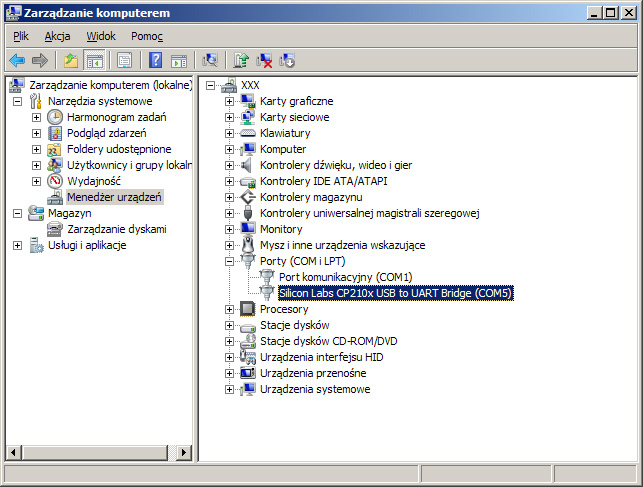
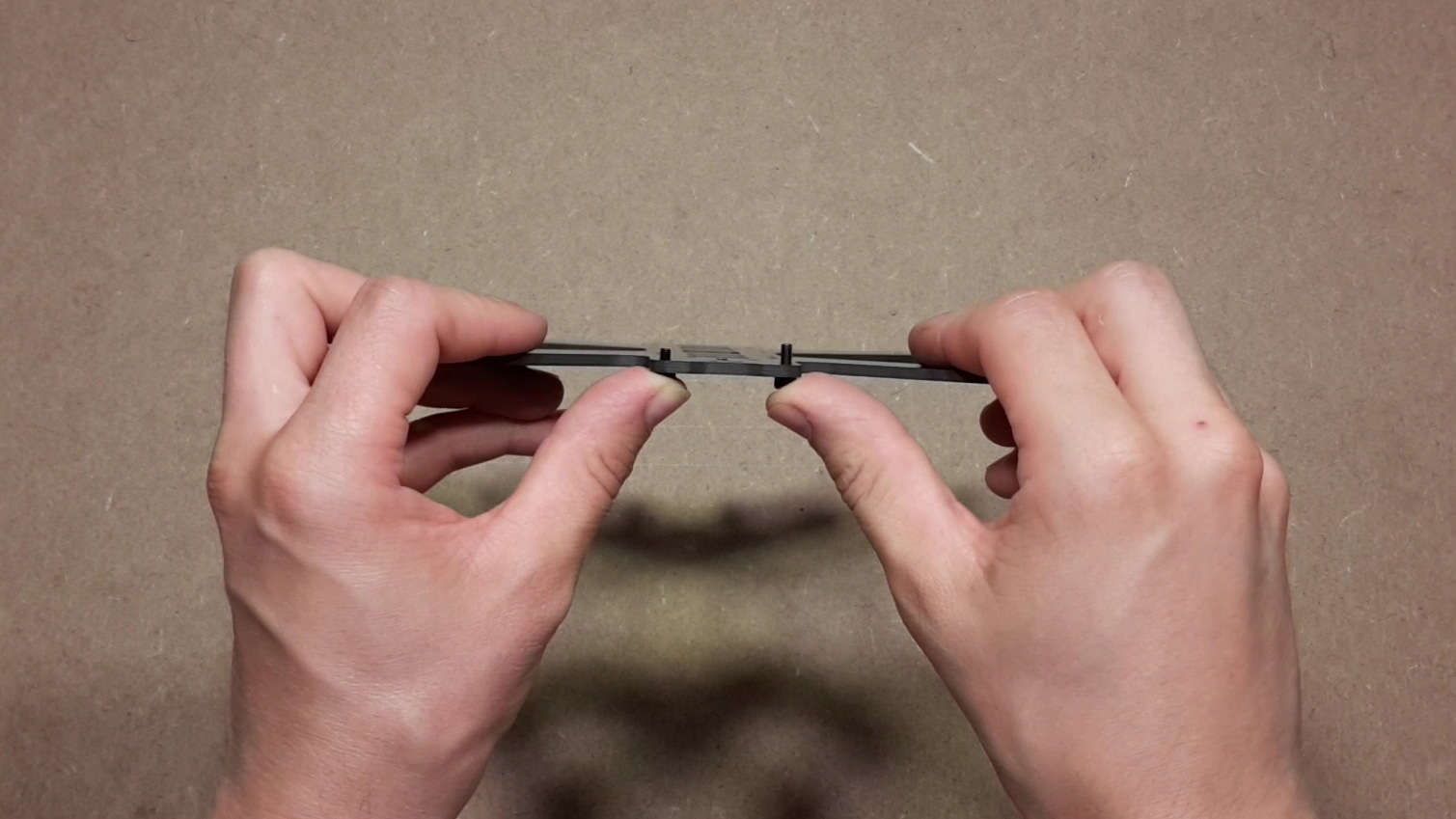
Miało być o konfiguracji Cleanflight, ale zanim do tego przejdę muszę ustawić właściwy kierunek obrotu silników. BLHeli czyli ESC setup manual. Zdaję sobie sprawę, że tematy konfiguracji jakiegokolwiek sprzętu wzbudzają kontrowersje dlatego w poniższym artykule przedstawię to co znam i co działa dla mnie. Potrzebuję następujący software: sterownik interfejsu USB UART http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx Cleanflight https://chrome.google.com/webstore/detail/cleanflight-configurator/enacoimjcgeinfnnnpajinjgmkahmfgb?hl=pl BLHeli Suite https://blhelisuite.wordpress.com/ Po podłączeniu kontrolera lotu za pomocą kabla micro USB i instalacji sterownika w menedżerze urządzeń pojawia się nowy port COM. Rozłączam kontroler. Uruchamiam Cleanflight. Zwieram pady oznaczone jako boot na FC za pomocą spinacza i podłączam kontroler (dioda powinna świecić światłem ciągłym). Wgrywam nowy firmware do kontrolera lotu. Ten etap potrafi być frustrujący, różne FC mają różne kaprysy i jeśli z jakiegoś powodu nie udaje się wgrać nowego firmware to kombinujcie z opcjami, zmniejszcie baud rate, spróbujcie bez zwierania boot, spróbujcie na innym kompie. W menu Firmware Flasher wybieram rodzaj FC, firmware który chcę wgrać, pozostałe opcje jak na zdjęciu > Load firmware online > Flash firmware. Po skończeniu flashowania rozłączam kontroler i usuwam zworkę boot. Usuń śmigła z silników Uruchamiam BLHeli Suite. Podłączam LiPo. Podłączam FC pod USB. Wybieram interfejs Atmel BLHeli / SK Bootloader (Cleanflight) Wybieram właściwy port COM > Connect > Read setup Następuje odczyt ustawień i dowiaduję się, że 20A OCDAY ESC to AFRO 12A ale mniejsza o to. Na dole mogę przełączać się między poszczególnymi regulatorami. Aktualizuję BLHeli na ESC. Flash BLHeli > wybieram firmware i zatwierdzam oddzielnie dla każdego ESC. Rozłączam kontroler przez Disconnect, rozłączam USB, rozłączam LiPo Ustawienia ESC. Podłączam LiPo, podłączam FC pod USB > Connect > Read setup. Motor Direction Reversed - najważniejsza opcja, która dotyczy ESC 2 i 3 (jeśli gdzieś zamienione były kabelki na połączeniu motor-esc ta opcja może być wymagana na innych ESC, lub w ogóle niepotrzebna). Po każdej zmianie zapisuję ustawienia. I na tym można by zakończyć konfigurację BLHeli i przejść do Cleanflight, ale jest jest jeszcze kilka rzeczy, które warto sprawdzić. Poniższe opcje dotyczą wszystkich ESC. Motor Timing Medium lub Medium High - medium spokojnie wystarczy, zależy na jakim ustawieniu silniki będą pracowały lepiej. PWM frequency/Damped Dampedlight - odpowiada za aktywne hamownie silników. PPM Min i PPM Max - zakres pracy ESC, po dokładny opis odsyłam do Temperature Protection Off - nie wyłączaj ESC w przypadku przegrzania, zależy czy ESC ma wbudowany termistor (wolę tę opcję niż odcięcie w złym momencie) Low RPM Power Protect On - wyłącz ESC w przypadku zablokowania silnika. Beacon Delay 5 minutes - po 5 minutach bezczynności silniki zaczną brzęczeć, jeśli nie masz buzzera to jest ostatnia deska ratunku na znalezienie quada w polu. To wszystko, rozłączam kontroler przez Disconnect, rozłączam USB, rozłączam LiPo.
-
FrSky X4R-sb słaby zasięg "rf signal critical"
Hincek odpowiedział(a) na Hincek temat w Odbiorniki RC
No to mnie pocieszyłeś Dla potomności - rewizja odbiornika X4R_REV0.3.1 -
FrSky X4R-sb słaby zasięg "rf signal critical"
Hincek odpowiedział(a) na Hincek temat w Odbiorniki RC
Poprawiłem luty na obu gniazdach - bez zmian :/ -
Cześć, Do niedawna z powodzeniem używałem FrSky X4R-sb z firmware LBT, aż bez wyraźnej przyczyny Taranis zaczął wysyłać ostrzeżenie "rf signal critical" przy czym odległość od modelu nie przekraczała 50m Nie widać by cokolwiek się w odbiorniku spaliło, wymieniłem antenki na nowe, kolejny raz go sflashowałem i zbindowałem. Brak poprawy. Gdy odbiornik leży w pokoju 2m od nadajnika ma RSSI ~60%. Dla testu zainstalowałem antenki PCB od X8R co dało poprawę RSSI do ~70% przy teście z odległości 2m. Czy ktoś z Was miał podobną sytuację? Wszystkie inne funkcje odbiornika działają prawidłowo, tylko ten RSSI. Problem pojawił się po instalacji odbiornika w innym modelu, EDF z ESC 60A, innego związku przyczynowo-skutkowego nie widzę. Inne moje odbiorniki i Taranis podają "normalne" wartości RSSI, więc wykluczam winę aparatury.
-
Dubai 210mm Mini Carbon Racing Quadcopter – relacja z budowy
Hincek odpowiedział(a) na Hincek temat w Multikoptery
Anteny są zbyt delikatne jak na mój gust, jedno złe lądowanie i antena cała pogięta W zestawie była osłonka ale kto by tam używał Dzięki, będę jednak musiał zainwestować w jakiś softbox bo WB różnie wychodzi a poprawianie tego później to kolejne godziny zabawy. -
Dubai 210mm Mini Carbon Racing Quadcopter – relacja z budowy
Hincek odpowiedział(a) na Hincek temat w Multikoptery
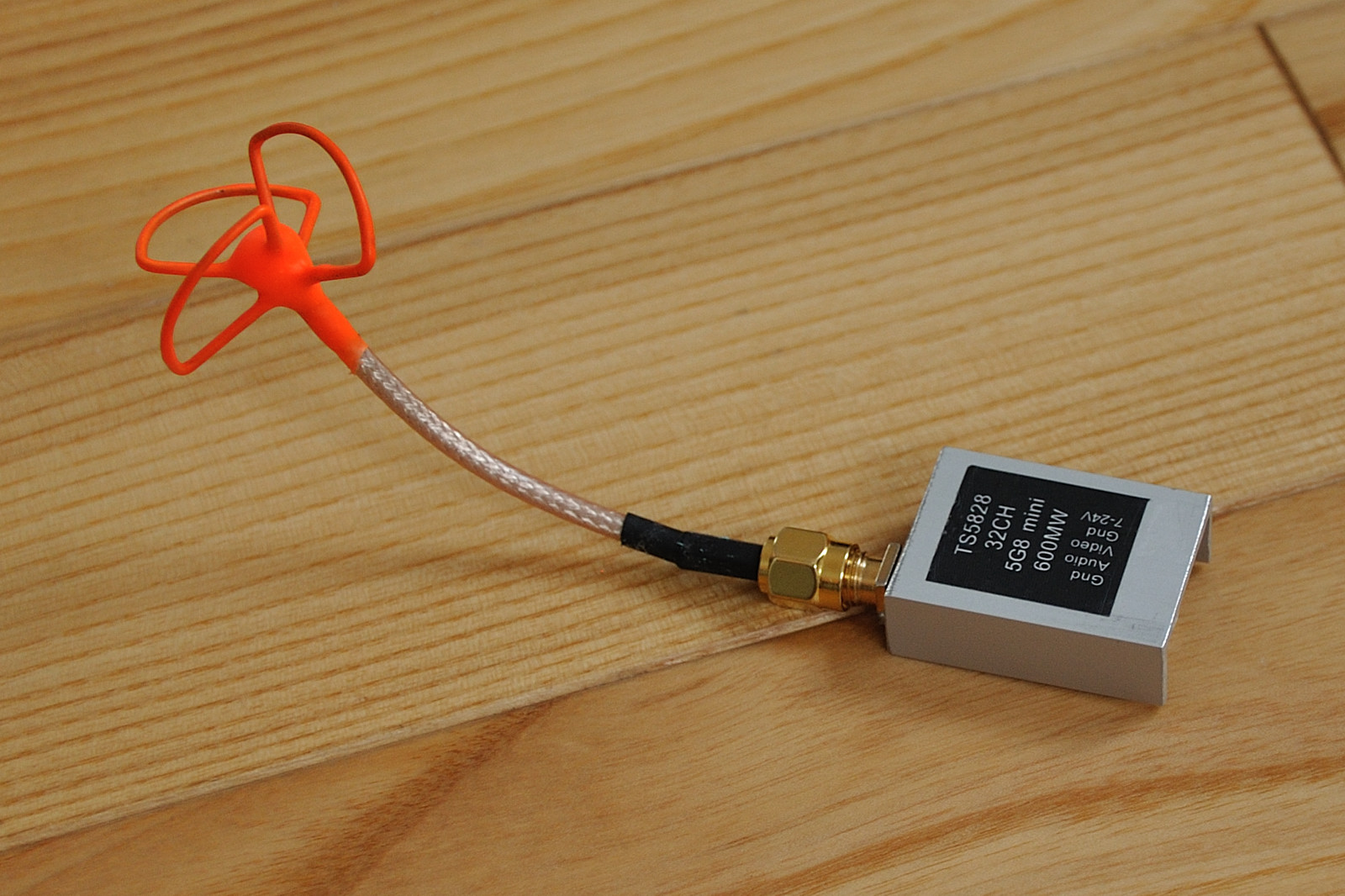
Faktycznie nadajnik TS5828 rozgrzewa się niemiłosiernie dlatego zastosowałem taki patent i póki co jest ok, a używam go ok 4 miesiące. Jeden z kolegów używa taki sam nadajnik bez radiatora i nic się na razie nie dzieje. Tak czy inaczej, w trakcie instalacji należy pamiętać o dobrej nadajnika wentylacji -
Dubai 210mm Mini Carbon Racing Quadcopter – relacja z budowy
Hincek odpowiedział(a) na Hincek temat w Multikoptery
Dzięki Antena wykonana przez forumowicza o ksywce Bartwaw. Szukam czegoś innego bo jestem średnio zadowolony, a może zbyt wiele wymagam, okaże się po zmianie. Cleanflight z powodu przyzwyczajenia i większego ogarnięcia, ale Betaflight również spróbuję. Takie porównanie to dobry pomysł na artykuł. Nadajnik jest wklejony dwustronną taśmą termoprzewodzącą w ceownik aluminiowy. Prawda, zaleca się stosowanie średniej mocy np, Loctite. W prawdziwym życiu jeszcze nie miałem nigdy problemu z samoczynnym odkręcaniem śrub, bo i tak wychodzę z założenia, że co jakiś czas trzeba sprawdzać wszystkie mocowania. -
Dubai 210mm Mini Carbon Racing Quadcopter – relacja z budowy http://pfmrc.eu/index.php?/topic/64179-dubai-210mm-mini-carbon-racing-quadcopter-%E2%80%93-relacja-z-budowy/
-
Dubai 210mm Mini Carbon Racing Quadcopter – relacja z budowy
Hincek opublikował(a) temat w Multikoptery
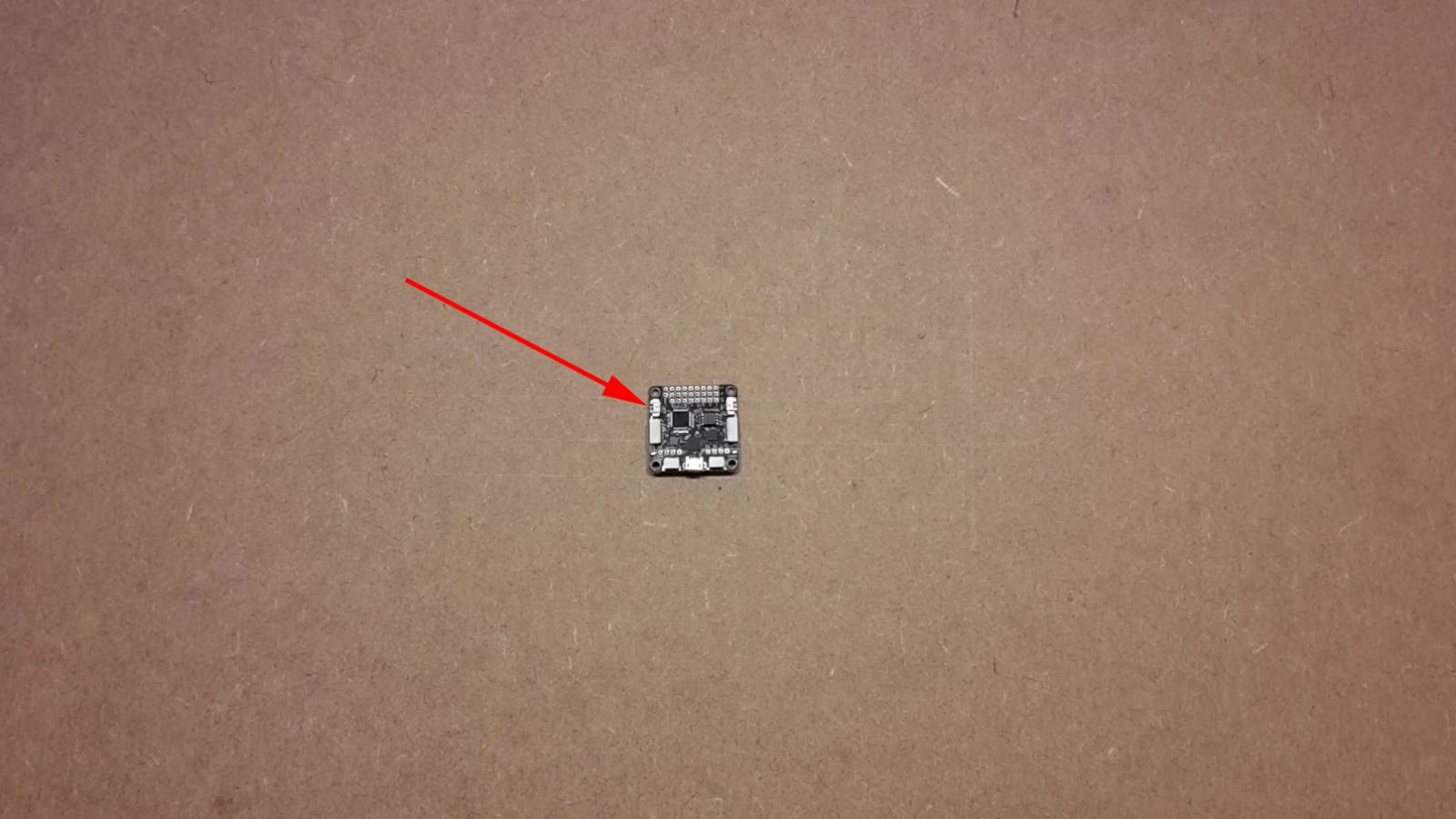
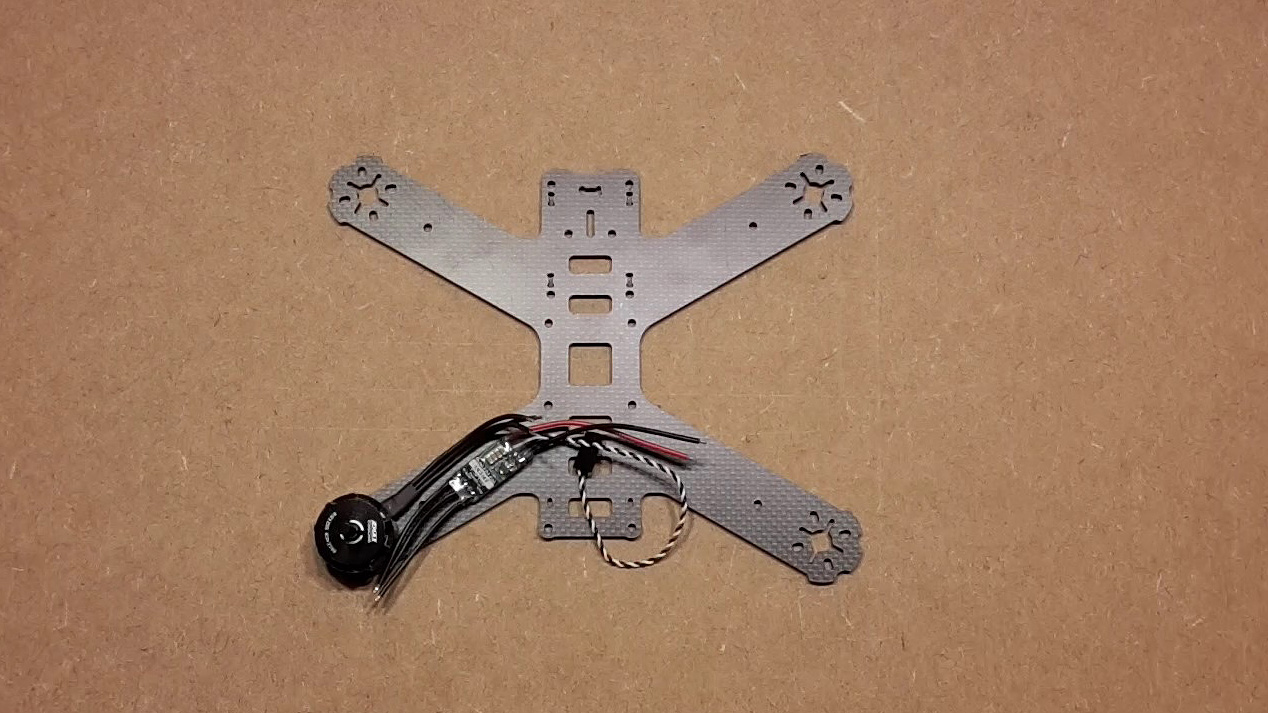
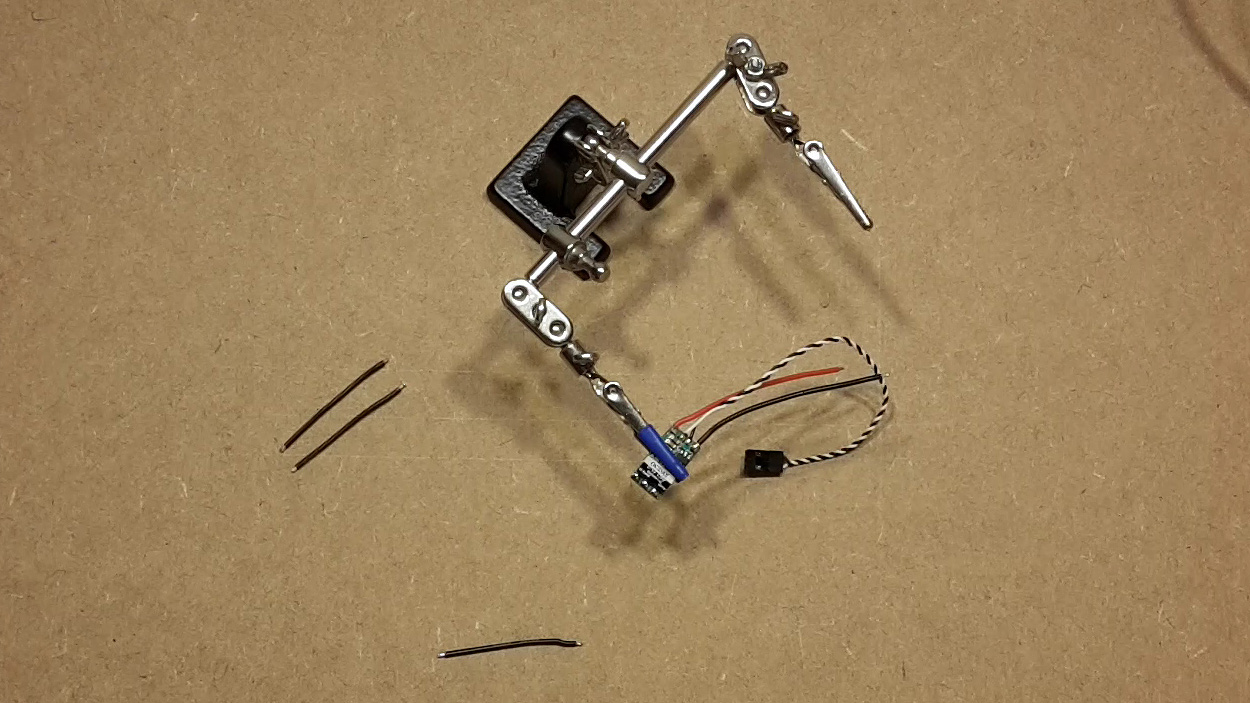
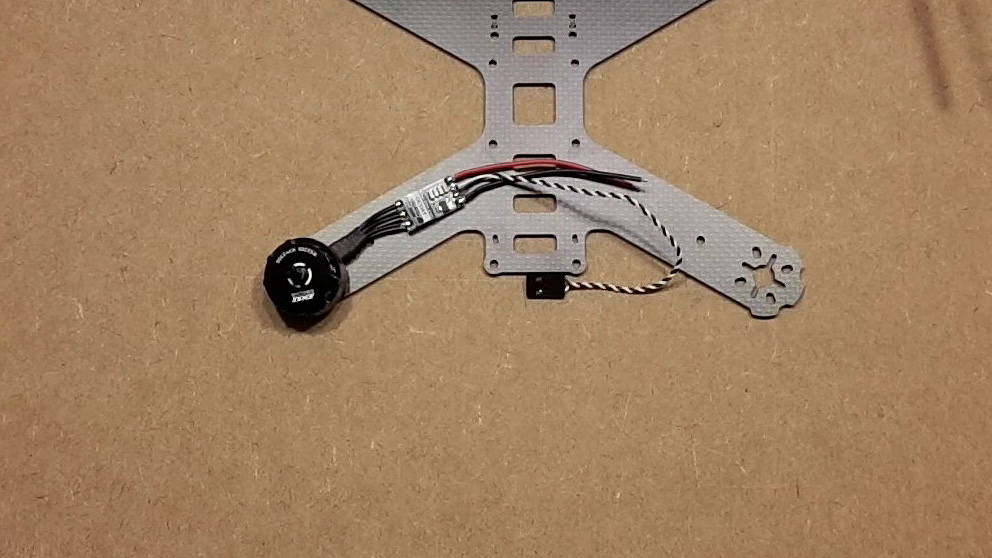
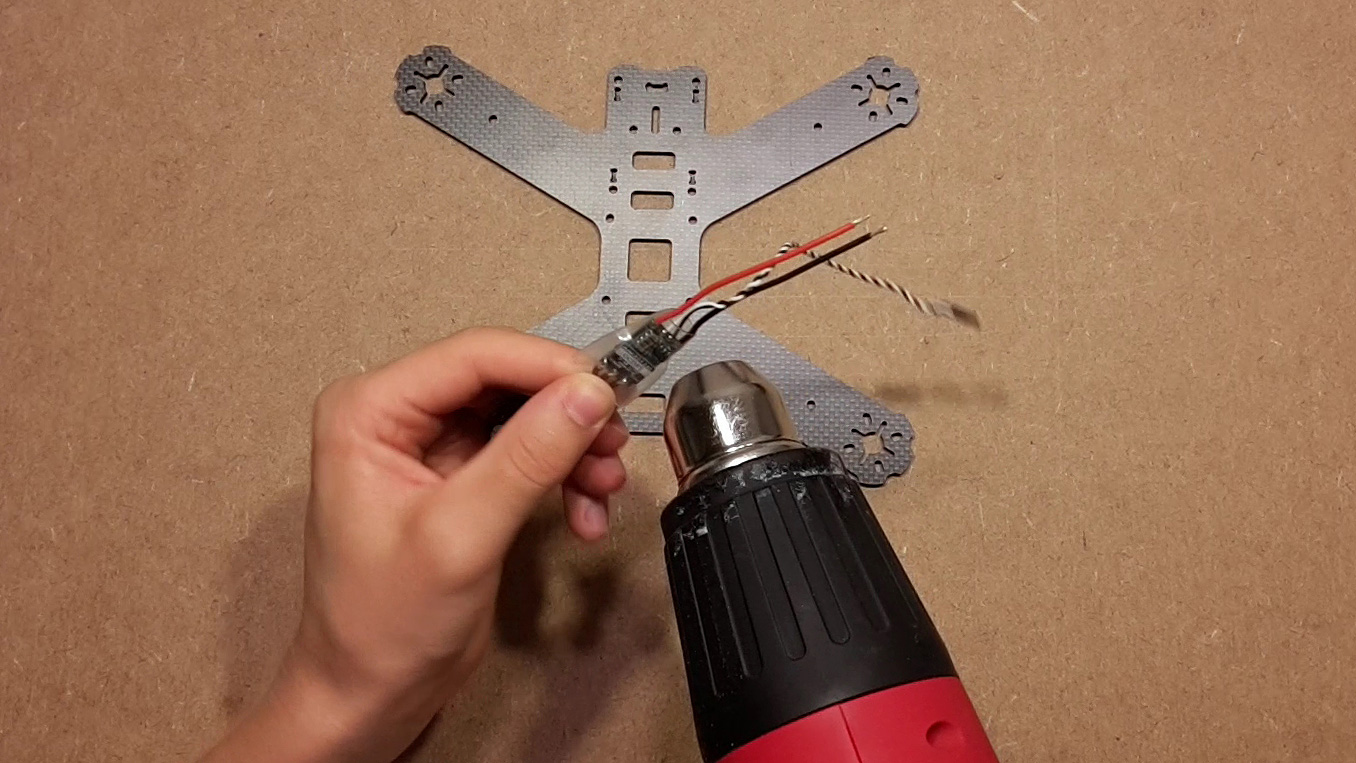
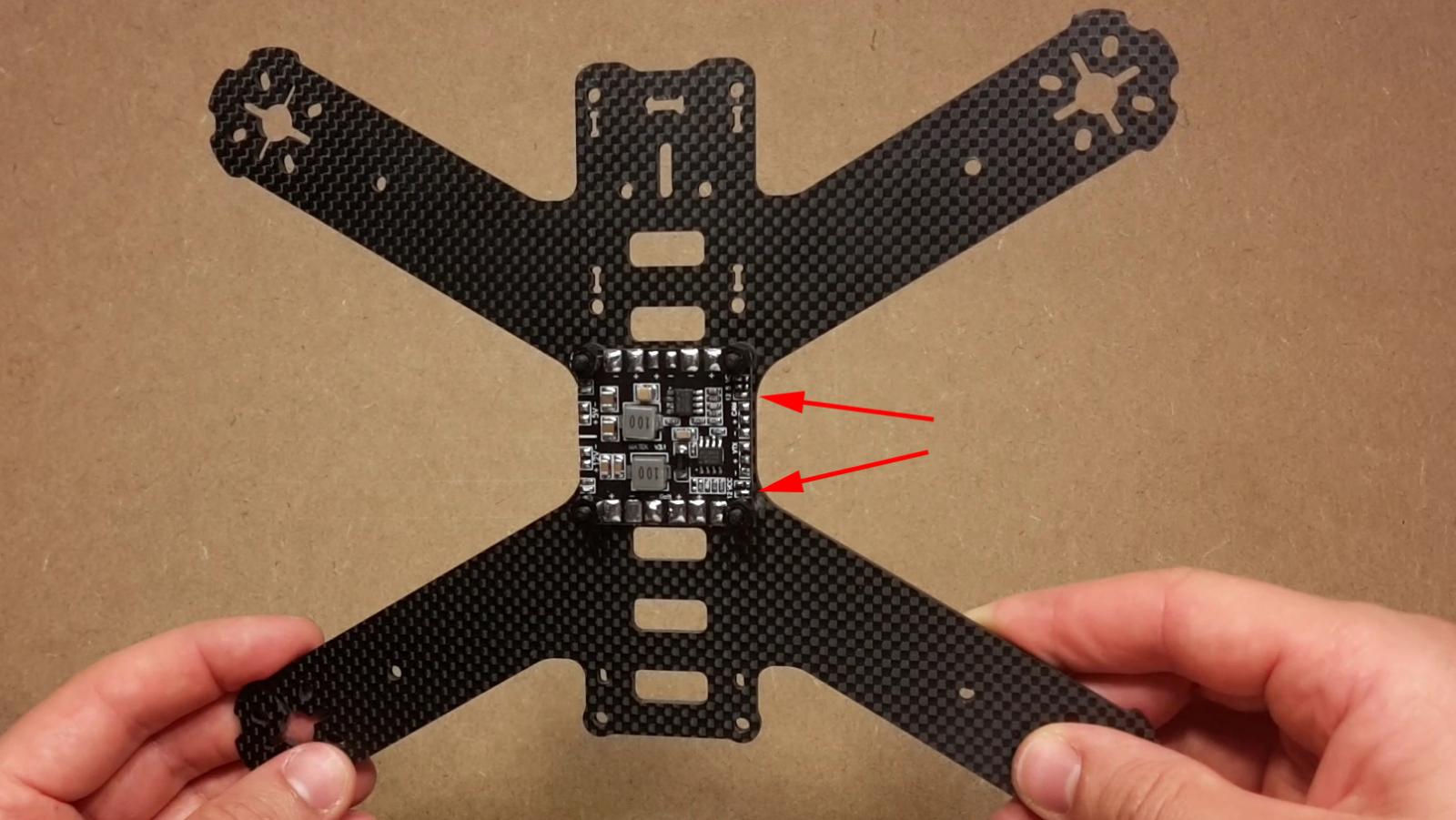
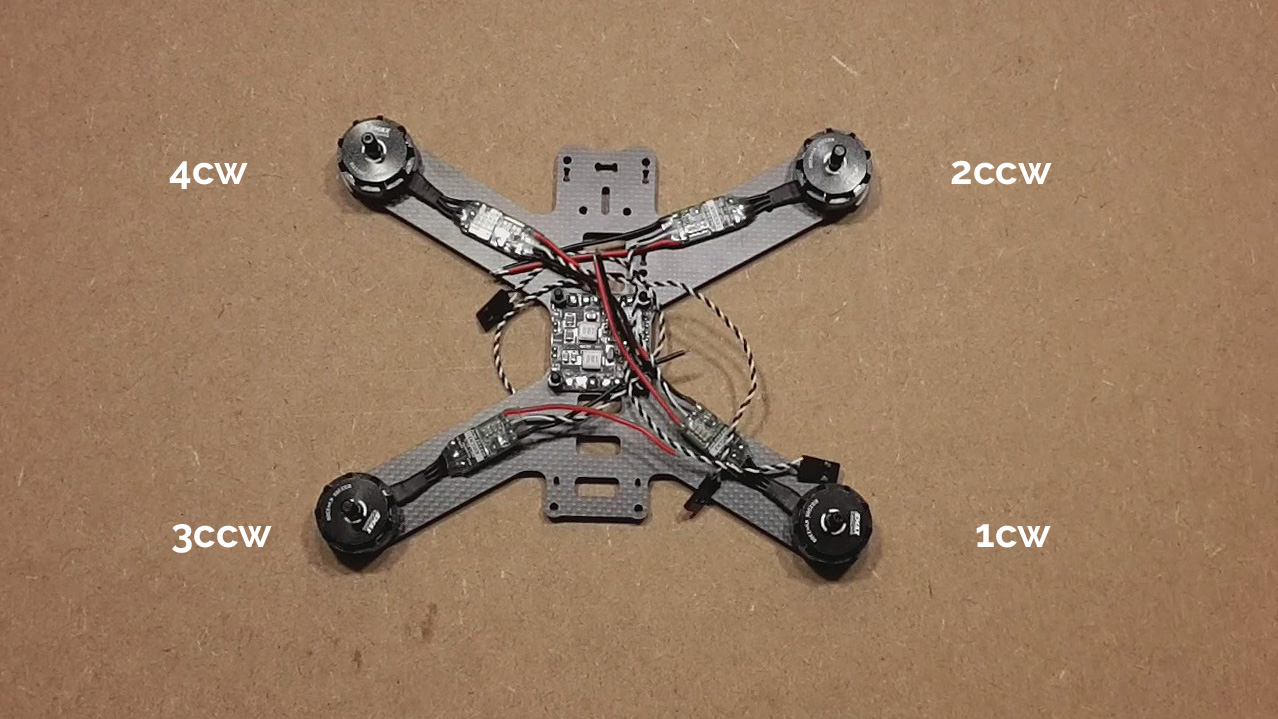
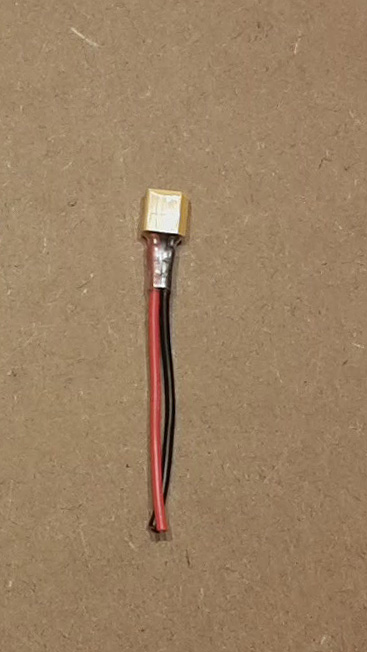
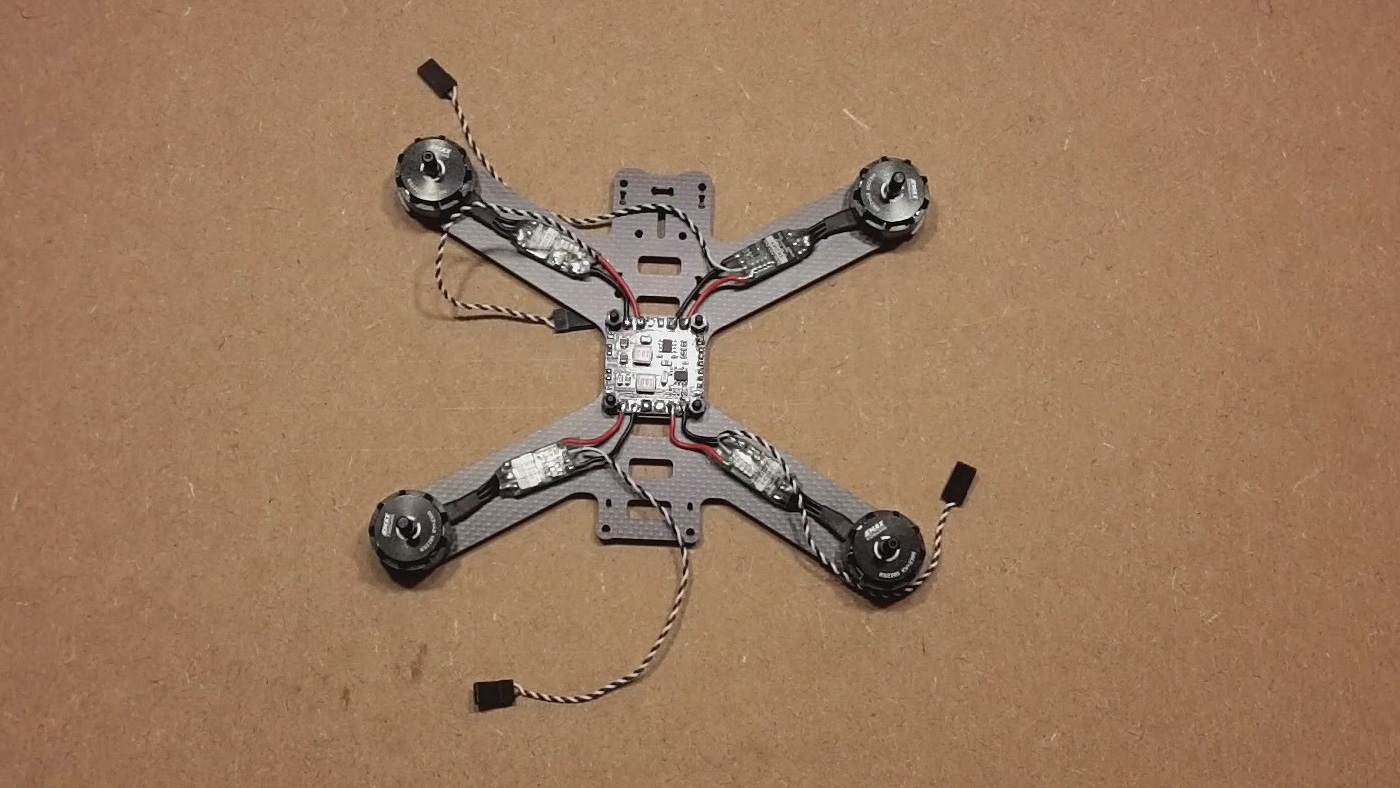
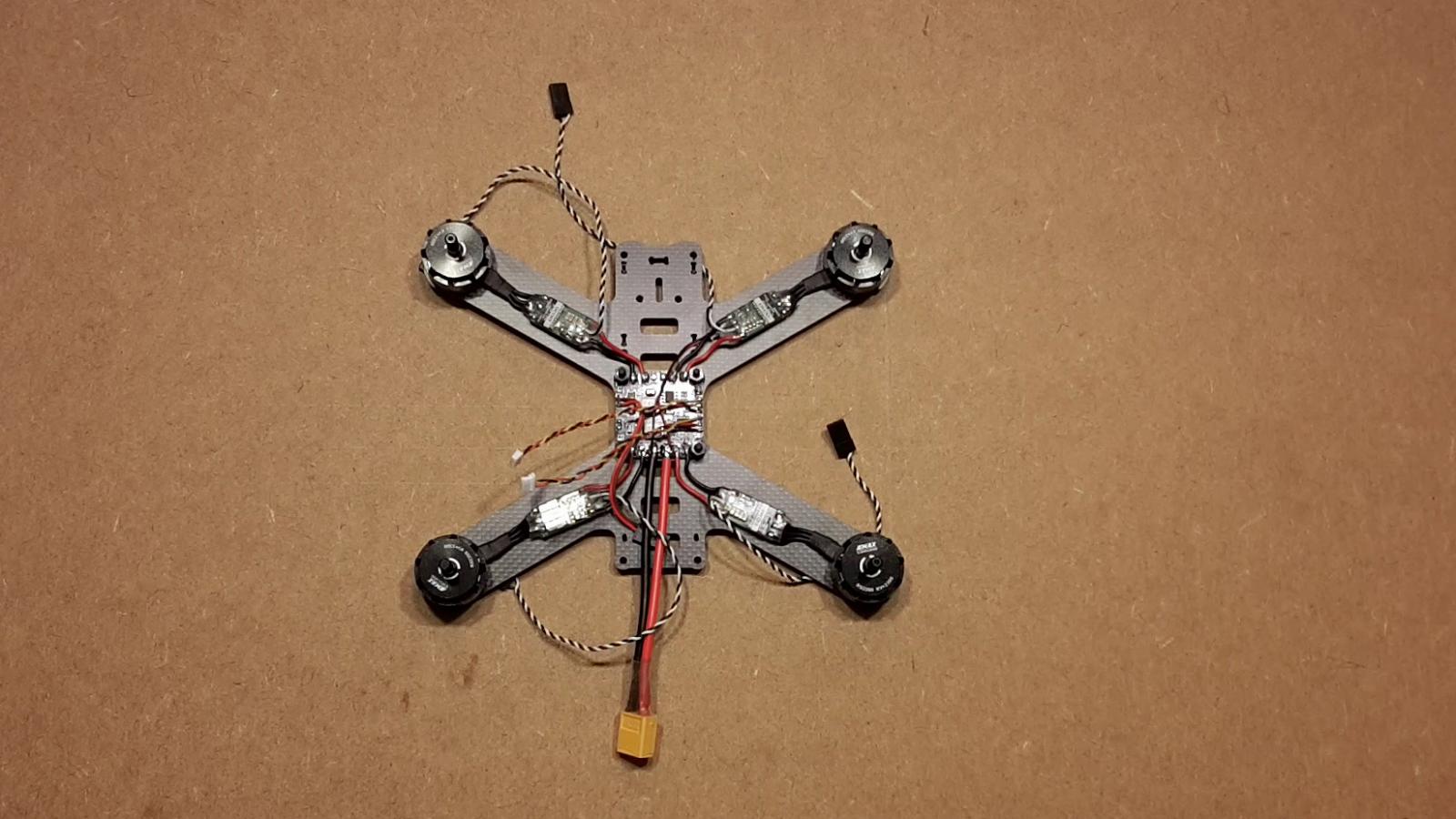
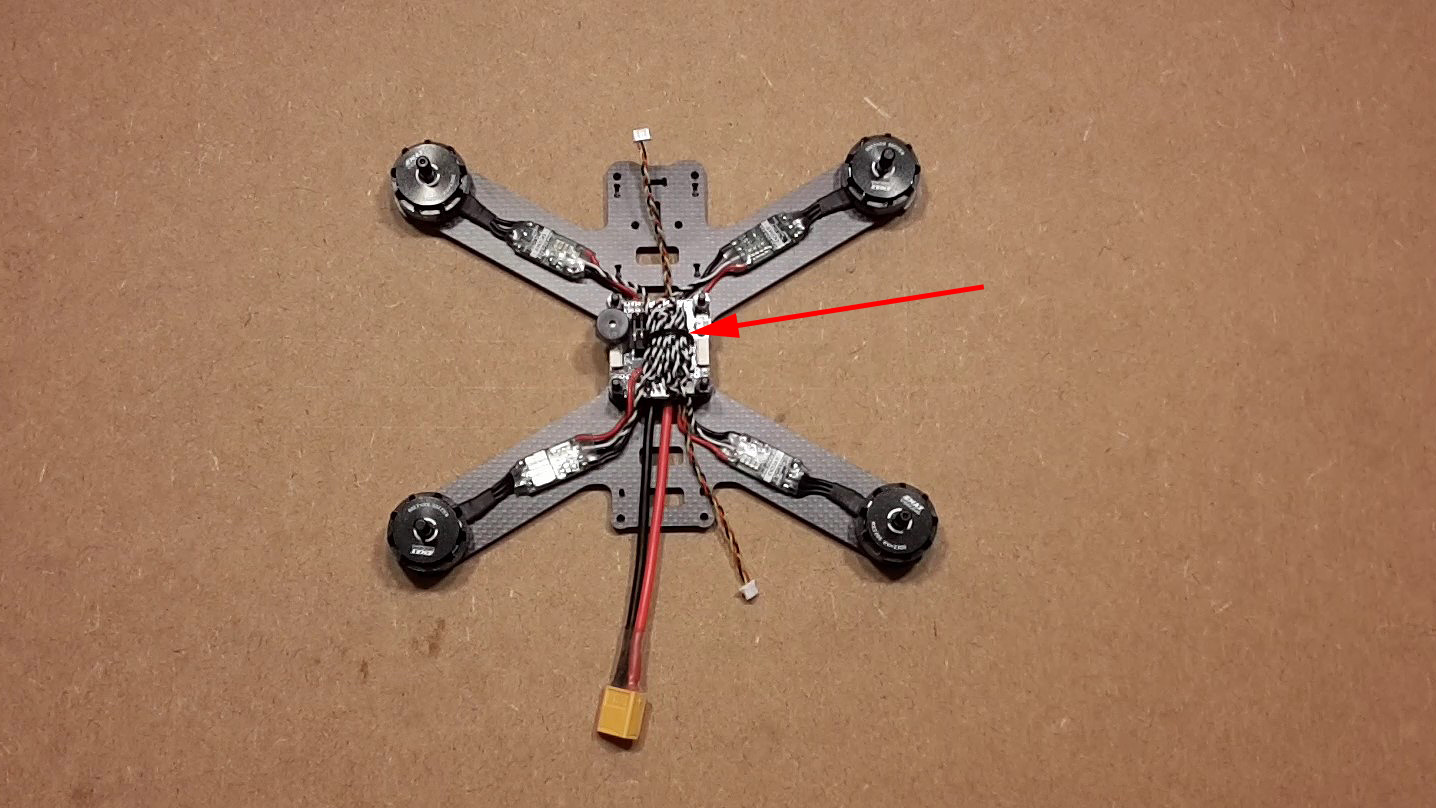
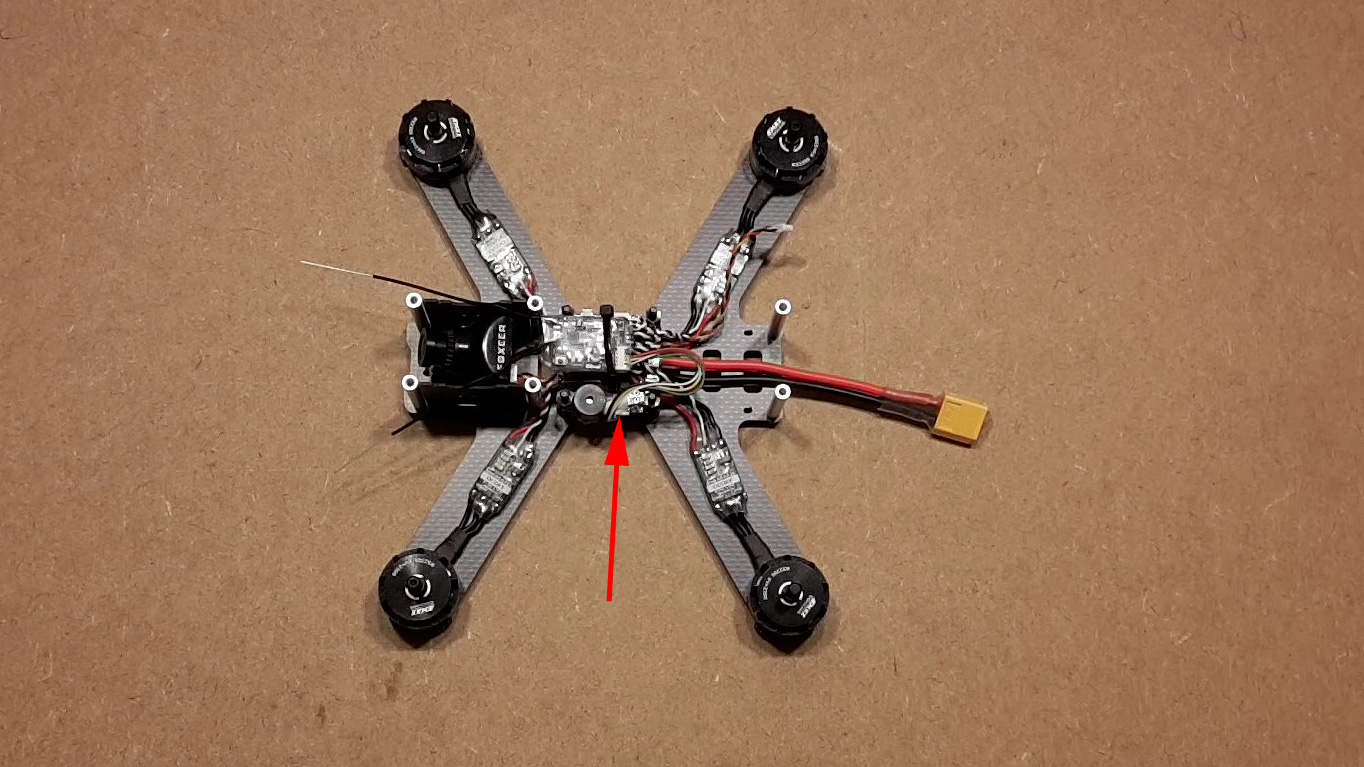
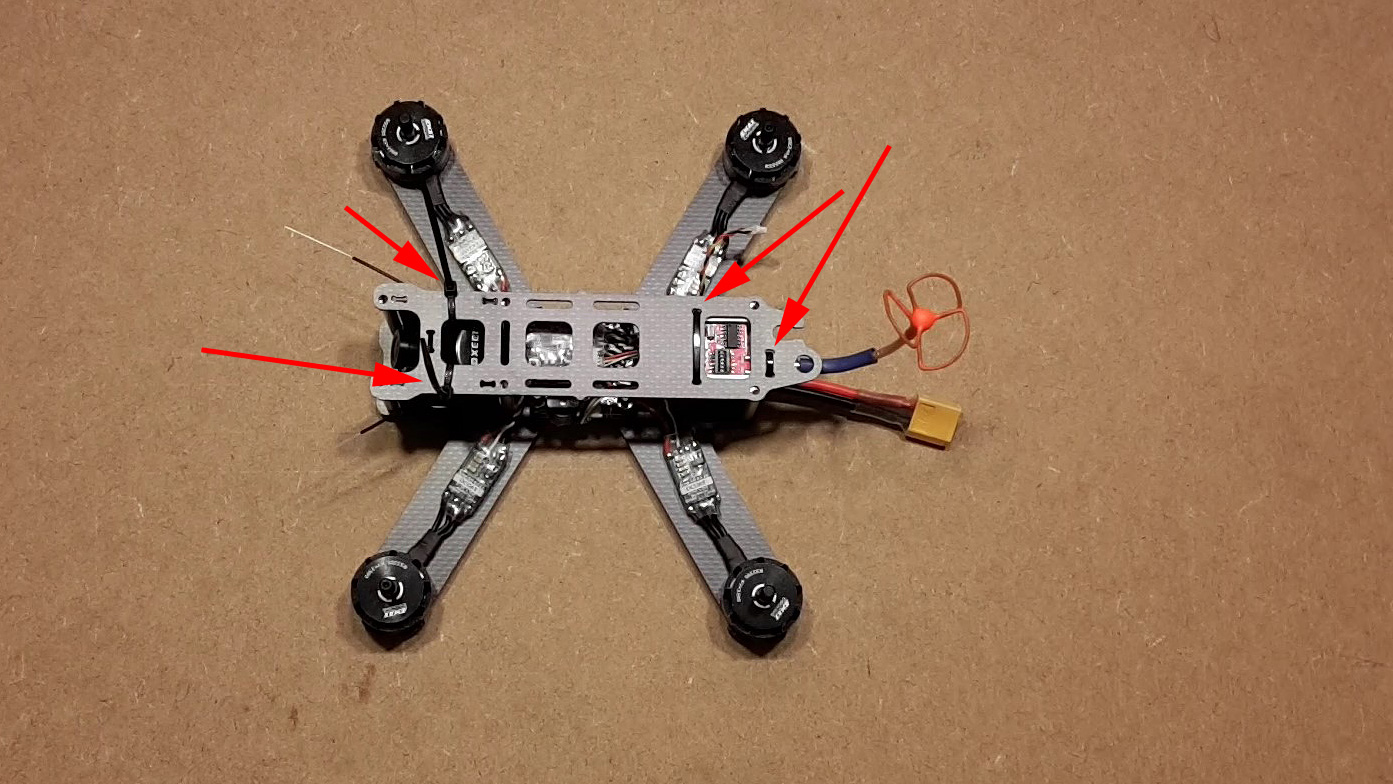
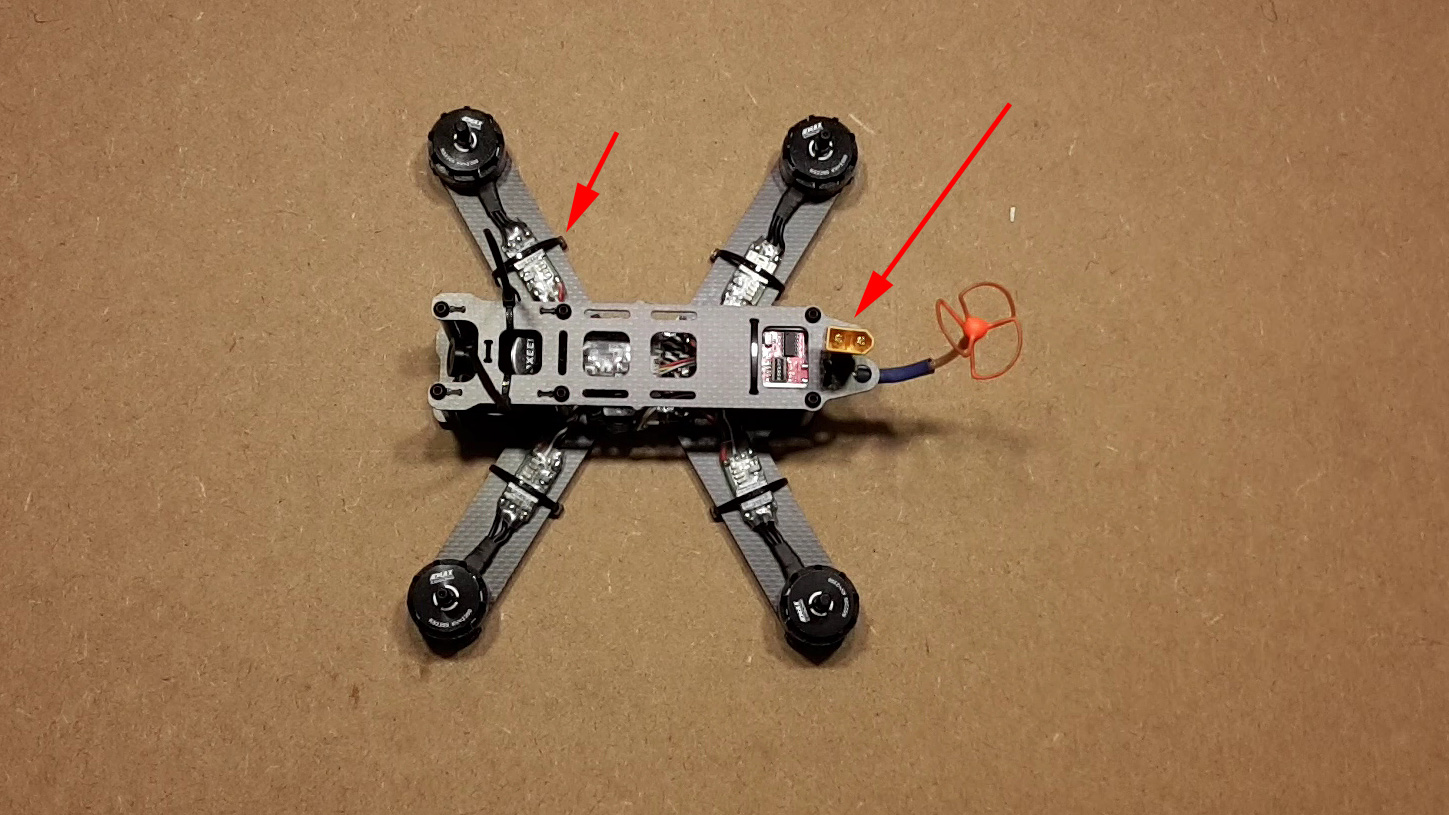
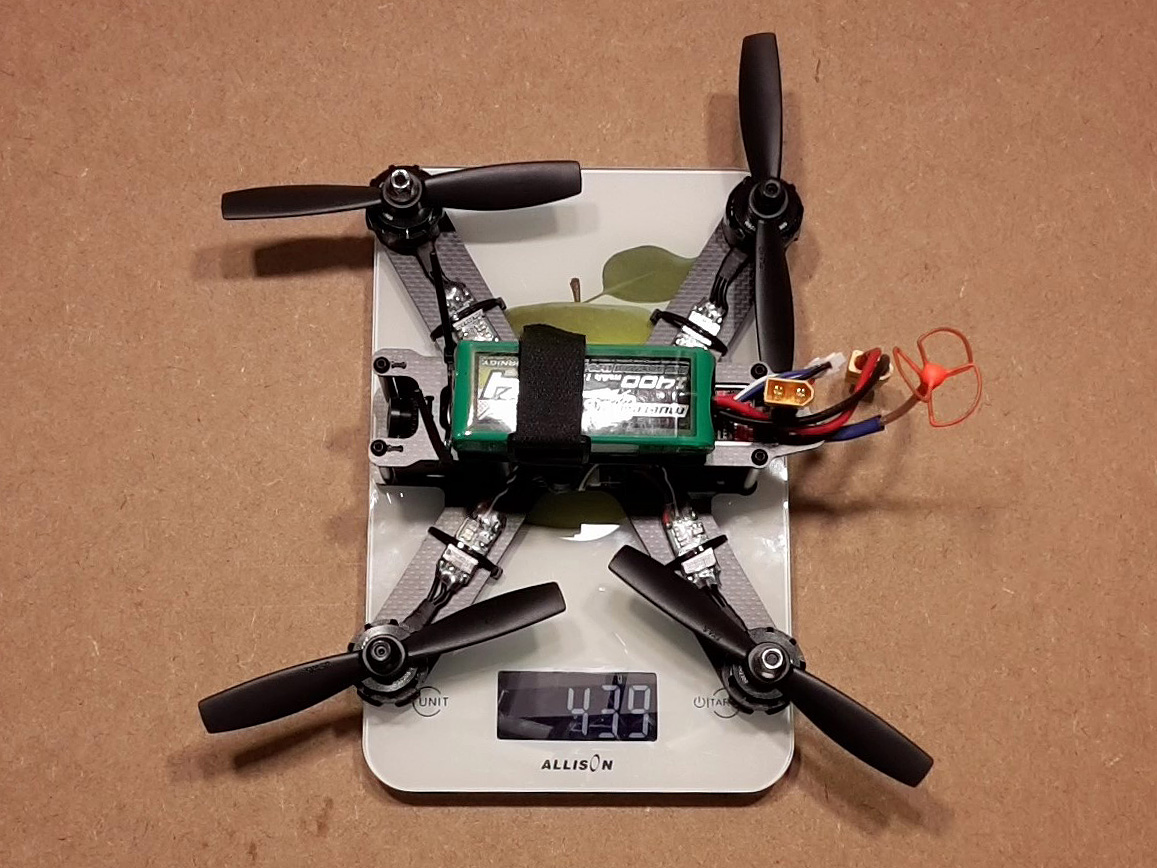
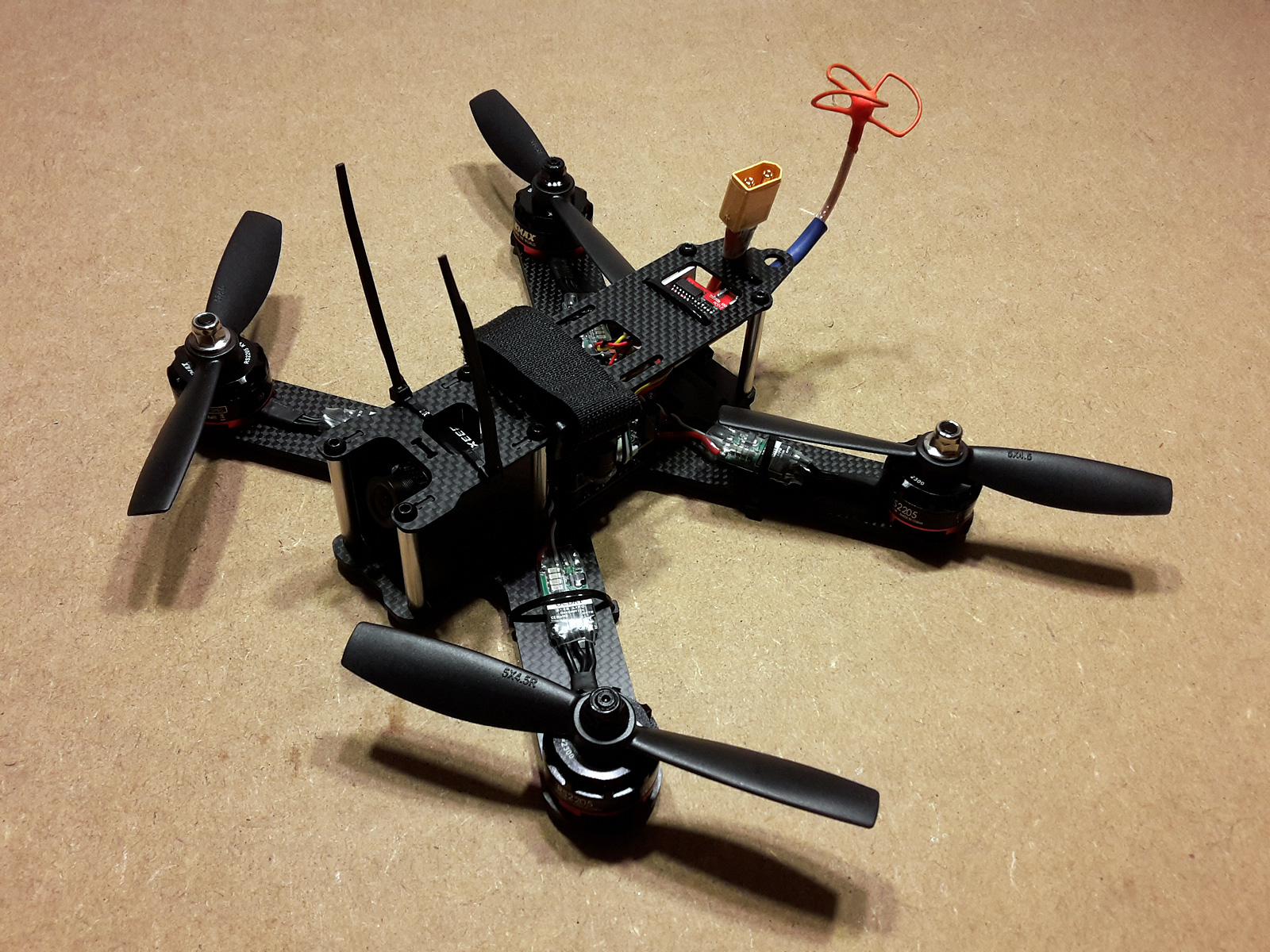
Dzięki uprzejmości sklepu gearbest.com otrzymałem do testów zestaw mini quadrokoptera wyścigowego, Dubai 210mm Mini Carbon Racing Quadcopter i w poniższym artykule przedstawię Wam relację z jego budowy. Poniżej znajdziecie unboxing i opis poszczególnych elementów zestawu http://pfmrc.eu/index.php?/topic/63557-dubai-210mm-mini-carbon-racing-quadcopter/ Link do zestawu w sklepie gearbest.com http://www.gearbest.com/rc-quadcopters/pp_362846.html?wid=21 Zachęcam do obejrzenia widea z budowy. Niestety muszę zacząć od niedoróbek. Śrubki z zestawu są zbyt krótkie i pozostawiają zbyt mało gwintu by bezpiecznie skręcić ramę z filarami dlatego zamiast nich użyłem długich śrub które były dołączone w zestawie z silnikami. W kontrolerze lotu znalazłem dwa standardowe problemy które pojawiają się w klonach SP Racing F3. Pierwszy to brak wbudowanej pamięci na logi, drugi to źle podłączone gniazdo buzzera, które trzeba usunąć i przylutować buzzer bezpośrednio do płytki kontrolera. W budowie użyję możliwie jak najmniej dodatkowych elementów pochodzących spoza zestawu, ale FPV być musi Potrzebne narzędzia i akcesoria: lutownica cyna nóż imbus 2,0 szczypce boczne pęseta trzecia ręka buzzer kable silikonowe o dużej średnicy złącze XT60 odbiornik RC LiPo 3S, 4s na własną odpowiedzialność opaska z rzepem rzep, taśma piankowa lub silikonowa pod baterię rurki termokurczliwe w kilku rozmiarach nylonowe śrubki, podkładki, odstępniki i nakrętki FPV kamera, nadajnik, antena Przymierzam silnik i regulator do ramienia, skracam kabelki i ściągam z nich izolację. Usuwam rurkę termokurczliwą z regulatora i kabelki zasilające od strony silnika. Następnie nakładam świeżą cynę na odkryte pady regulatora. Lutuję kabelki silnika z regulatorem nie przejmując się kolejnością, ponieważ kierunek obrotów silnika ustawię w oprogramowaniu BLHeli. Aby zabezpieczyć regulator zakładam na niego rurkę termokurczliwą. Podobnie przygotowuję pozostałe silniki i regulatory. Nakładam cynę na wszystkie pady płyty dystrybucji zasilania, zwieram ze sobą pady odpowiadające za zasilanie kamery oraz nadajnika FPV i montuję płytę dystrybucji zasilania do ramy za pomocą nylonowych śrubek. Między ramę a PDB wkładam nylonowe podkładki jako izolację. Do ramy mocuję silniki zgodnie z oznaczeniami kierunku obrotu, używając krótkich śrubek dołączonych do zestawu wraz z silnikami. Przygotowuję doprowadzenie zasilania do płyty dystrybucji. Do złącza XT60 lutuję kable silikonowe i zabezpieczam miejsce połączenia za pomocą rurek termokurczliwych. Do kontrolera lotu przylutowałem buzzer i piny sygnałowe dla regulatorów silników, które skierowałem w tył. Kabelki sygnałowe można oczywiście przylutować bezpośrednio do FC. Odbiornik RC to FRSKY XSR do którego przylutowałem kabelki zasilające oraz S-bus i S-port Dociąłem kable zasilające regulatorów do odpowiedniej długości usunąłem izolację i przylutowałem do PDB. Następnie przylutowałem główne kable zasilające, wyprowadzenie czujnika napięcia, zasilanie kontrolera lotu, nadajnika FPV i kamery. Podczas instalacji kontrolera zwracam uwagę na jego właściwą orientację, kolejność i polaryzację podłączeń silników, spinam też zbyt długie kable sygnałowe. Jak zaznaczyłem na początku filary mocuję za pomocą długich śrub które były w zestawie z silnikami. Kamerę Foxeer HS1177 można zamocować bezpośrednio do bocznych elementów ramy. Instaluję również odbiornik RC i podłączam pod kontroler lotu do portu IO2. W górnej płycie ramy przygotowane są wycięcia ułatwiające montaż mini nadajnika FPV, znalazło się tez wycięcie ułatwiające zmianę częstotliwości pracy nadajnika. Opaski zaciskowe stanowią podporę dla anten odbiornika. Mocuję kable zasilające i regulatory za pomocą opasek zaciskowych. Gotowe Waga koptera gotowego do lotu z bateria 3S 1400mAh wyniosła 440g. W kolejnym artykule - Cleanflight setup.
-
1, oko-koszulka-klasyczny-czarna-XL- bez nick-u koszulka-klasyczny-czarna-L- bez nick-u koszulka-klasyczny-biała-L- bez nick-u koszulka-klasyczny-duży-granat-L-bez nisk-u czaparatura-premium-czarna-małe logo czaparatura-premium-czarna-małe logo czaparatura-premium-granat-duże logo 2.konrad.winiarski - koszulka - klasyczny duży - granatowa - L - bez nicka konrad.winiarski - czaparatura - duże logo - granatowa - premium - bez nicka 3.Jastrzab-koszulka-wzór klasyczny-granatowy-XXL- bez nicku 4. Pit-koszulka-klasyczny duży-czerwony-XL-bez nicku Pit-koszulka-klasyczny duży-biały XL-bez nicku Pit-koszulka-ewolucja- biały L - bez nicku Pit-koszulka-klasyczny duży - niebieski XL - bez nicku Pit-koszulka-klasyczny duży- biały L - bez nicku Pit-czaparatura-premium-popielaty- małe logo 5. Hincek - koszulka - ewolucja - biały - XL - bez nicku
-
Do pełni szczęścia i dokończenia budowy brakuje mi jeszcze kamery FPV, którą musiałem zamawiać 2 razy. Na szczęście jest już w WER Warszawa, więc dalszy ciąg relacji już niedługo.
-
Używam TK-102 i jest OK, zwłaszcza w stosunku do ceny. Minusem może być wielkość i konieczność instalacji karty SIM. Na szczęście jeszcze nie był przydatny "w realu"
-
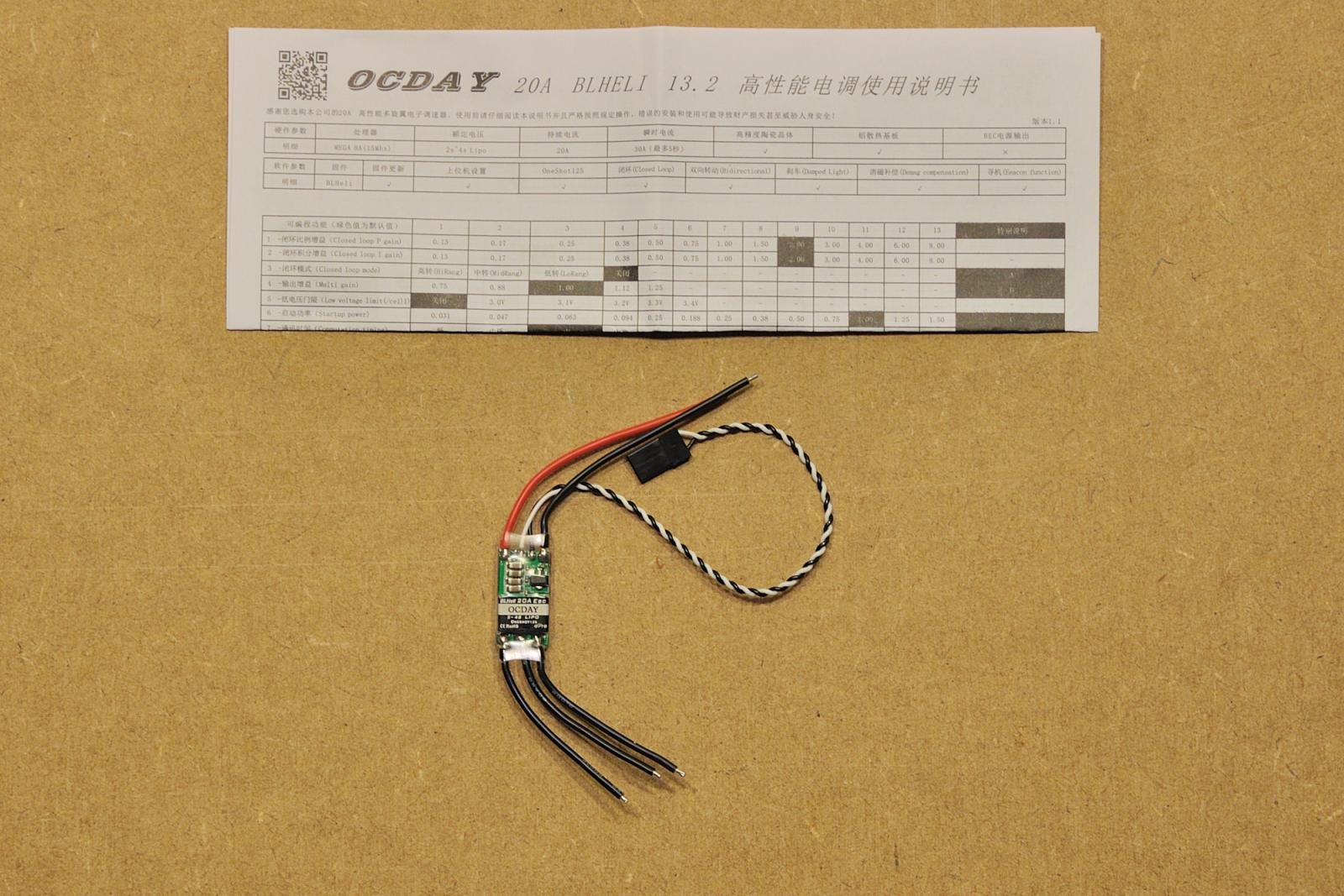
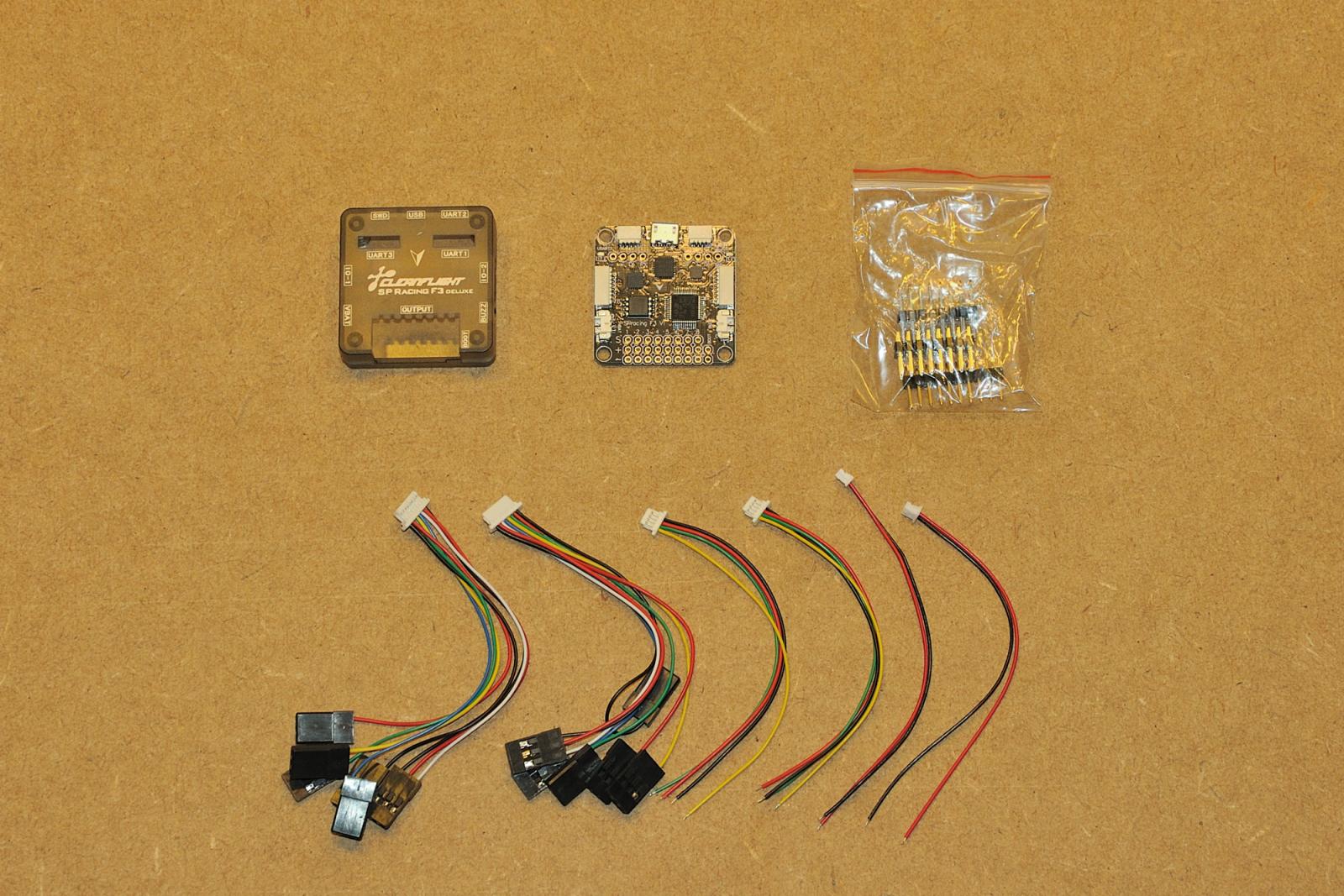
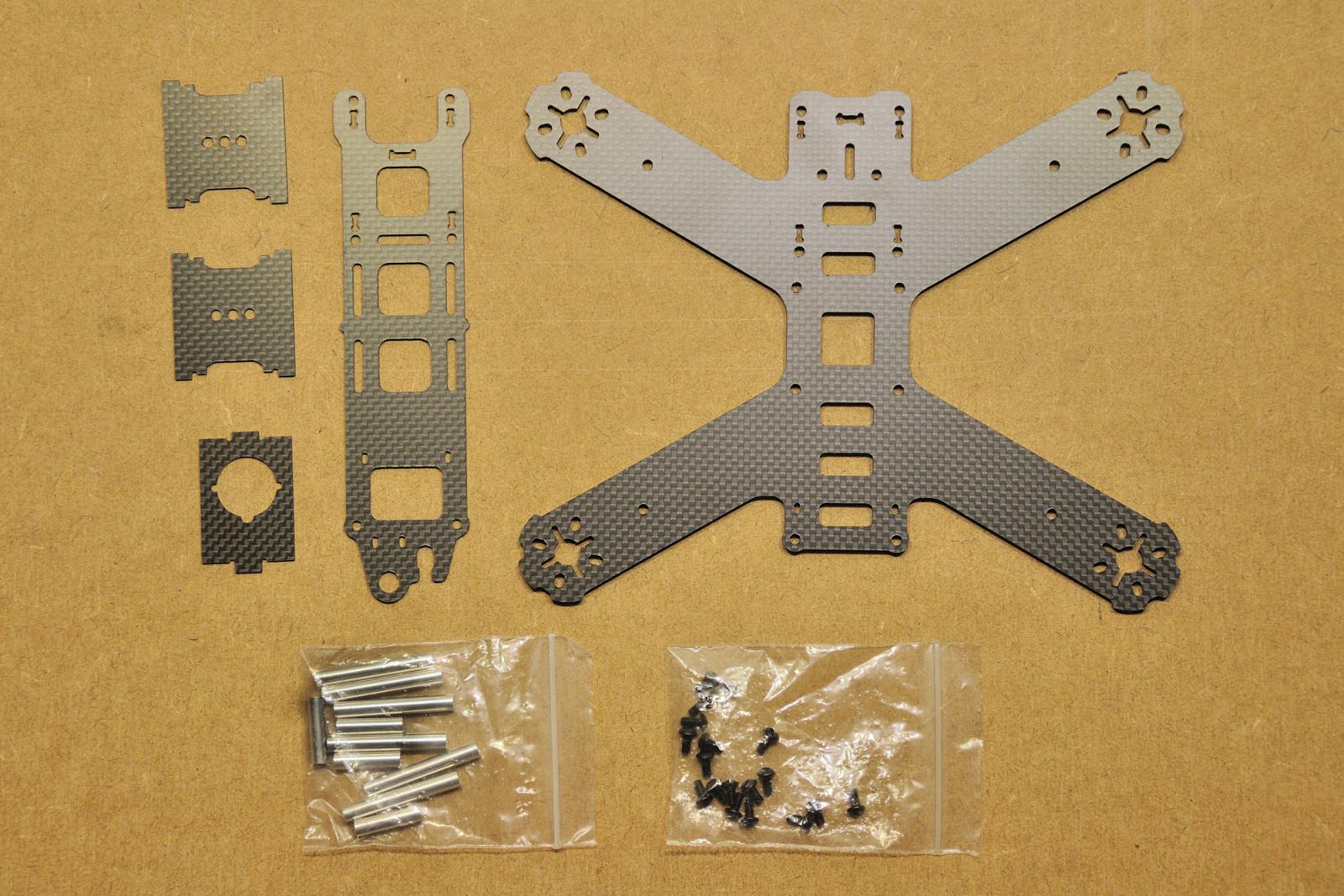
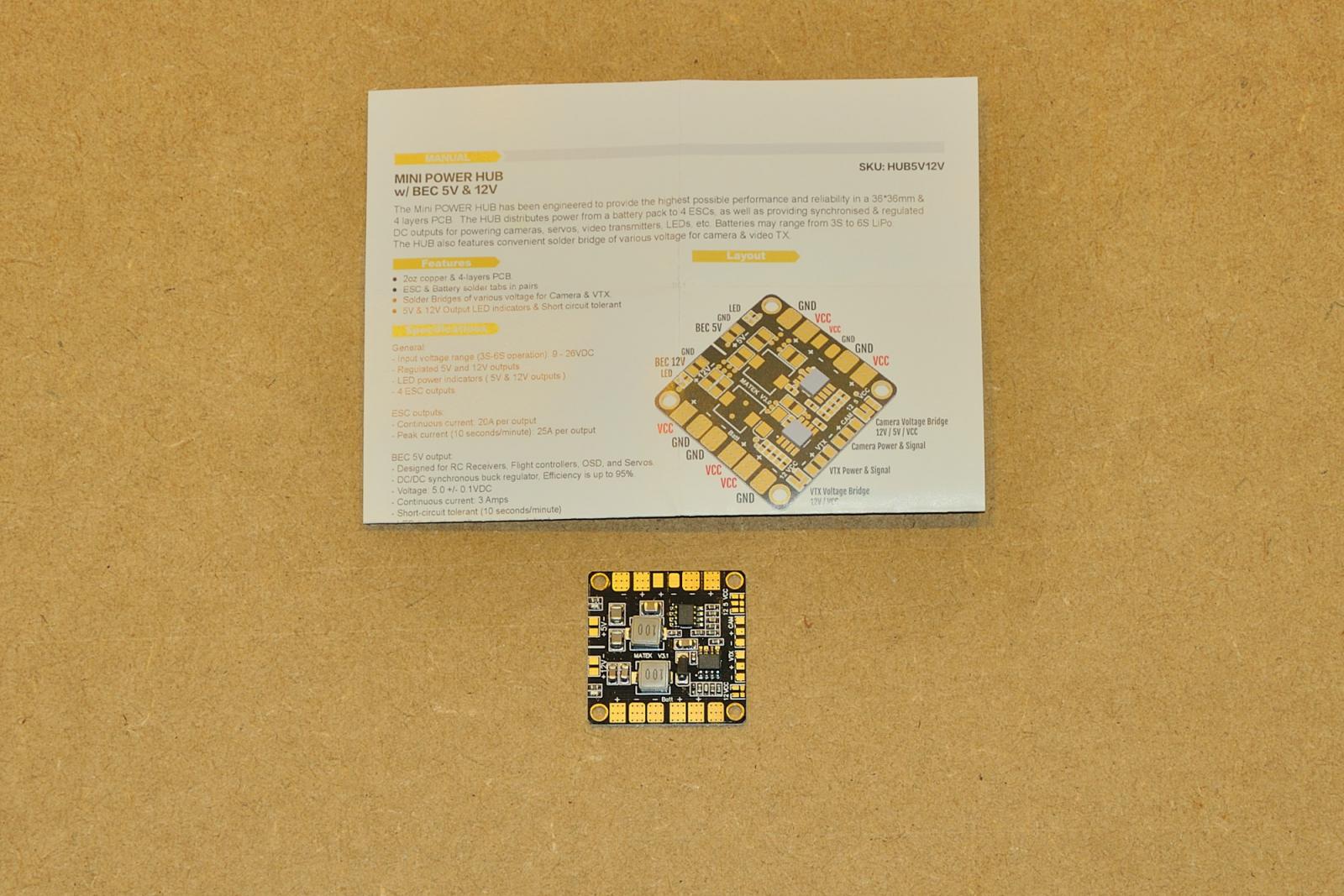
Dzięki uprzejmości sklepu gearbest.com otrzymałem do testów zestaw mini quadrokoptera wyścigowego, nosi on nazwę Dubai 210mm Mini Carbon Racing Quadcopter i w poniższym artykule przedstawię Wam jego poszczególne elementy. Link do zestawu w sklepie gearbest.com http://www.gearbest.com/rc-quadcopters/pp_362846.html?wid=21 Zachęcam do obejrzenia widea Na poniższym zdjęciu widzicie wszystkie elementy jakie zawarte są w zestawie. rama z włókna węglowego, 4x silniki Emax RS2205, 4x 20A mini regulatory blheli OCDAY, kontroler lotu SP Racing F3 Deluxe OCDAY, 2 komplety śmigieł 5045 bullnose OCDAY płytę dystrybucji zasilania Matek Silniki były odkryciem World Drone Prix na początku 2016 roku w Dubaju gdzie wszyscy zachwycali się tak zwanymi "red bottoms", czyli właśnie tymi silnikami. Zawody wygrał wtedy 15 letni Luke Bannister zgarniając 250000$ nagrody głównej. Latał on dronem wyposażonym w silniki Emax na ramie QAV210. Rama QAV210 Wykonana jest z włókna węglowego 3K i jest to klon popularnego Lumenier QAV210. Podstawę wykonano z jednego elementu i ma ona kształt zbliżony do litery X Rama akceptuje silniki o rozstawie śrub od 12mm do 19mm, czyli większość silników o rozmiarach od 13XX do 22XX. Maksymalna średnica śmigieł to 5 cali, do kompletu dołączono zestaw wsporników i śrubek Dane techniczne: materiał: włókno węglowe 3K grubość: 3mm podstawa, 1,5 pozostałe elementy rozstaw osi: 210mm waga: 92g (wszystkie elementy) Silniki Emax RS2205 2300KV "red bottom" To najmocniejsza strona tego zestawu, silniki są wysokiej jakości i z odpowiednio dobranymi śmigłami i regulatorami zapewniają ciąg ponad 1 kilograma każdy. Emax wykorzystał w nich technologię Cooling, która poprawia chłodzenie statora i magnesów silnika. W zestawie dostajemy klucz imbusowy, 3 nakrętki, 2 komplety śrub oraz zapasowe zawleczki. Dane techniczne: RPM: 2300KV zasilanie: 2S - 4S średnica wału: 5mm ciąg: 1024g waga: 35g (silnik, śrubki, nakrętka) Emax dbając o reputację umieszcza na opakowaniach swoich produktów kody zabezpieczające, dzięki którym można zweryfikować ich autentyczność. http://58.64.201.213:9095/ Regulatory OCDAY BL mini 20A ESC Regulatory typu opto, pracują na firmware BLHELI i wspierają Oneshot 125 Wytrzymują one stałe obciążenie 20A i chwilowe 30A. Dane techniczne: programowanie: tak zasilanie: LiPo 2S - 4S stałe obciążenie: 20A wymiary: 23x12x5 BEC: brak waga: 6g (z kabelkami) Kontroler lotu SP Racing F3 Deluxe Zalety: uniwersalny 32-bitowy kontroler lotu, stabilizator lotu, autopilot o dużych możliwościach obsługuje samoloty, helikoptery, wielowirnikowce, gimbale (stabilizacja kamery) umożliwia zastosowanie GPS (autopilot, misje, RTH) ogromny wybór akcesoriów współpracujących i rozszerzających możliwości kontrolera szeroki zakres wspieranych odbiorników (SumH, SumD, Spektrum, XBus, PPM, PWM) programowanie ledów black box (logger) wspiera oprogramowanie Cleanflight, Baseflight, Betaflight, iNav, itp Dane techniczne: wersja: 10DOF CPU: STM32F3 czujniki: MPU6050 wymiary: 36x36mm waga: 6g (sam kontroler) Śmigła OCDAY 5045 BN Śmigła typu bullnose, wykonano je z kompozytu, są one dość sztywne i przypominają śmigła innych firm o tym rozmiarze np. DAL. Dane techniczne: średnica: 5" skok: 4,5" średnica wału: 5mm (brak adapterów) waga: 15g komplet Płyta dystrybucji zasilania Matek Systems v3.1 Płytka oprócz standardowych wyjść na 4 regulatory silników oraz dwóch układów BEC dla 5V i 12V posiada dodatkowe dedykowane wyjścia dla kamery i nadajnika FPV, istnieje przy tym możliwość wyboru napięcia wyjściowego dla tych elementów za pomocą zworek które trzeba ze sobą zewrzeć. Przewidziano też jedno wolne wyjście prądowe na dowolny dodatkowy odbiornik prądu. Dane techniczne: napięcie wejściowe: 9-26V, LiPo 3-6S obciążenie wyjść ESC: stałe 20A, chwilowe 25A napięcie wyjściowe BEC: 5V/3A, 12V/2A waga: 7g wymiary: 36x36mm Wszystkie elementy były przez mnie zwymiarowane i zważone więc możecie być pewni, że podane powyżej informacje nie są po prostu skopiowane z Internetu Pierwsze wrażenia Jest to całkiem niezły zestaw na początek oraz do tuningu, pod warunkiem jednak, że osoba zainteresowana zdobyła już podstawy w naszym hobby od strony DIY. Co do sprzętu, to z natury nie mam zaufania do nieznanych mi producentów, dlatego z pewną dozą rezerwy podchodzę do regulatorów. Uważam też, że niepotrzebnie dołączono do zestawu F3 Deluxe, gdyż pieniądze zaoszczędzone na barometrze i kompasie można by było wydać na śmigła 5045x3 lub "markowe" ESC. Na szczęście widać, że GearBest wychodzi swoim klientom na przeciw i dodał już do oferty bardziej przemyślany zestaw, który brałbym w ciemno, gdyby nie te śmigła http://www.gearbest.com/multi-rotor-parts/pp_413710.html?wid=21 Już niedługo umieszczę relację z budowy oraz oblotu i modyfikacji tego zestawu.
-
Adam... jakby to powiedzieć... z każdym kolejnym rozbiciem helika coraz bardziej przechodzi na skrzydlatą stronę mocy ale jeszcze nic nie zbudował.
-
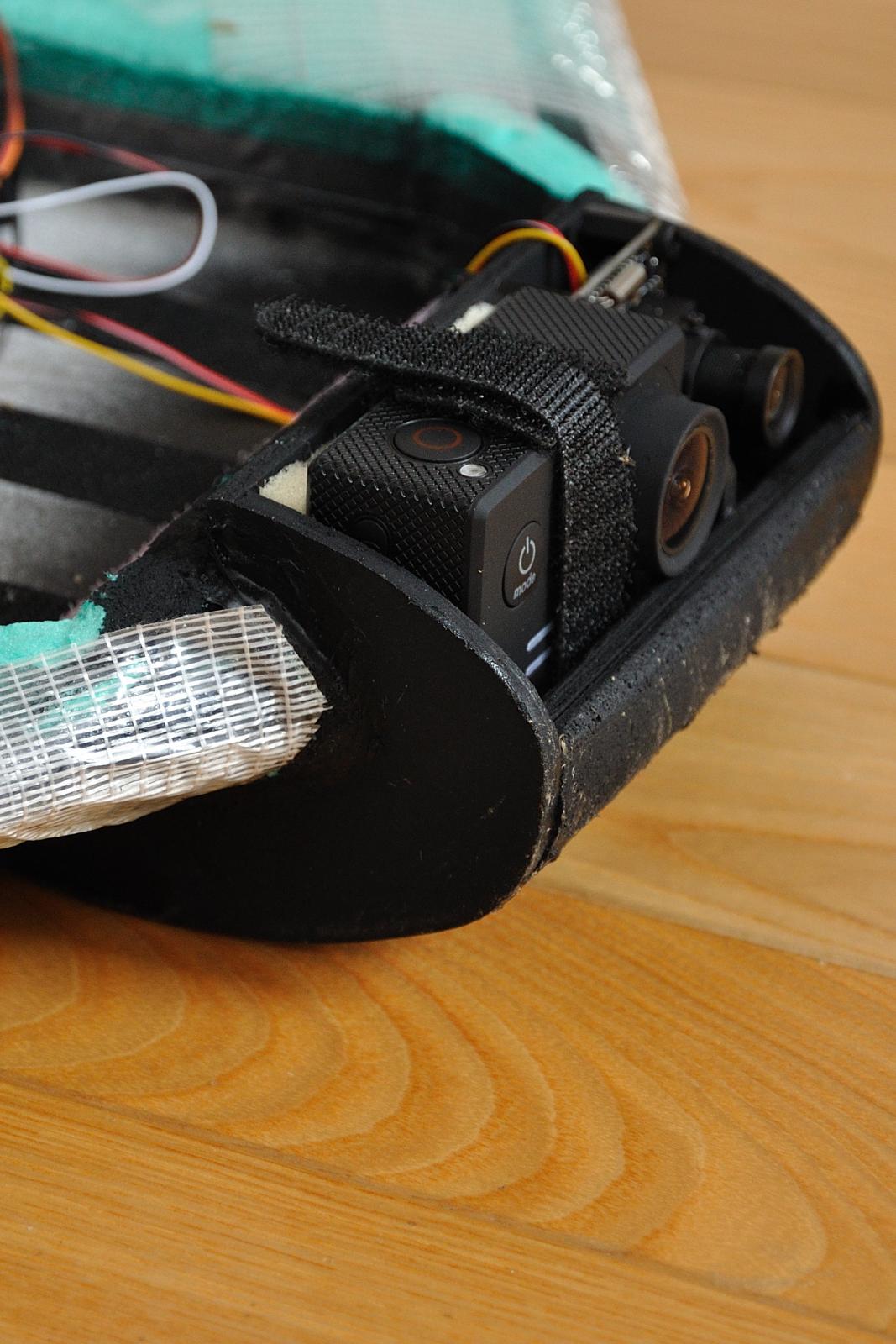
Na temat kamerki to można cały artykuł napisać, może ktoś się podejmie? W każdym razie warto też wyłączyć WDR i ustawić stały WB. Dziękuję, mam już sporo materiału znad jeziora Obecnie skrzydło wraz z SJ5000X, FPV i baterią 4S 3Ah waży 1580g
-
Dzięki, wkrótce powinienem dorzucić jeszcze jakieś filmiki, może coś bardziej dynamicznego
-
Lot był FPV, jednak ze względu na niedostateczną znajomość okolicy model musiał pozostawać w zasięgu wzroku mojego spottera. W znanym mi terenie latam na odległość 1,5km do wysokości 400m i 110kmh.
-
W końcu jakiś filmik - spokojny lot w Bieszczadach
-
Zapomniałem napisać o tym wcześniej, ale RTH działa. Możliwe, że przy pierwszej próbie była to kwestia jakości fixa 3D. Po włączeniu RTH silnik zmniejszył moc do ok 30%, model wrócił i zaczął wykonywać ósemki nad miejscem startu. Oczywiście na wykonanie takiej ósemki potrzebował trochę przestrzeni. Kompas jest wbudowany na płytce z GPS, a wysokość jest rejestrowana przez GPS.
-
Chętnie podejmę się tego zadania. DIY to moja druga natura
-
Z kawałków sklejki 4mm uskuteczniłem na dziobie "FPVpod" który dodatkowo spełnia rolę podwozia, mieści kamerkę FPV CCD Sony Effio i SJ5000X. Dodatkowo powstał TS5828 radiator mod, czyli kawałek ceownika alu przyklejonego do nadajnika taśmą termoprzewodzącą PS aktualny rekord prędkości 110km\h
-
Nowy FrSky Taranis plus nie binduje odbiorników
Hincek odpowiedział(a) na Hincek temat w Aparatury RC
I już po 4 miesiącach dostałem nowego Taranisa. Tym razem po wgraniu aktualizacji i firmware'ów do apki, modułu RF i odbiorników w końcu wszystko się binduje i działa poprawnie -
DIY FRSKY 8CH Receiver Frsky Airwolf RX-F801
Hincek odpowiedział(a) na jkaluza temat w Odbiorniki RC
Mam takiego, nie sprawdzałem co prawda max zasięgu ale do VLOS się nadaje, zamierzam kupić ich więcej -
FC z OSD i GPS prawie ogarnięte. FC - Seriously Pro Racing F3 6 DOF z Cleanflight iNav OSD - Micro MinimOSD KV team mod z MW OSD 1.6 GPS - moduł Arduino Ublox Neo 6M Założenia i ich status: czas lotu, przepustnica, pomiar RSSI i napięcia, alarmy - ok stabilizacja i sztuczny horyzont - ok GPS (prędkość, wysokość, odległość od domu, kierunek do domu) - ok RTH - gdzieś tam skręca ale niekoniecznie do domu :/ Alt Hold - nie działa