Pioterek
-
Postów
3 554 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
18
Treść opublikowana przez Pioterek
-

Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
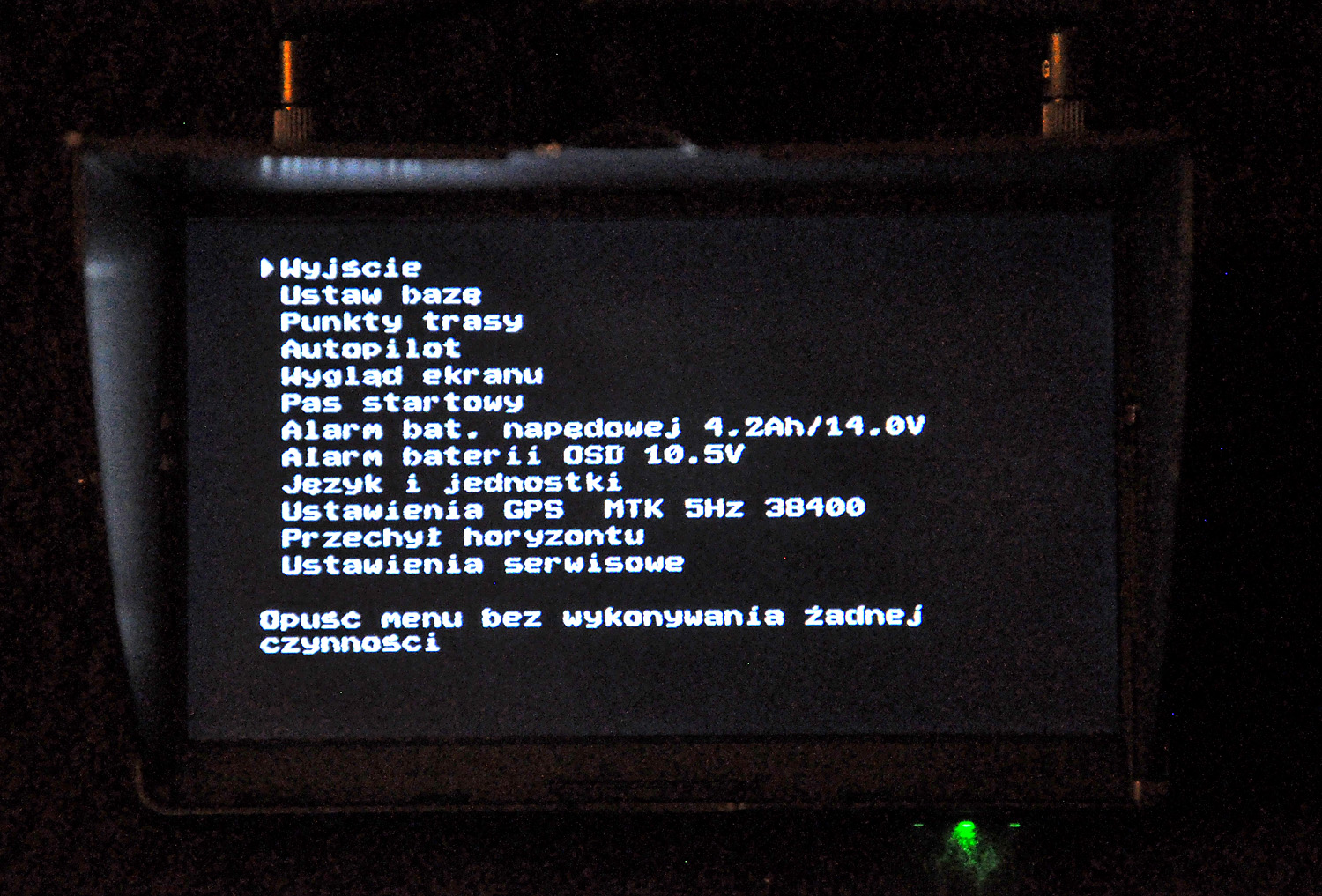
OSD cd. Ażeby móc ustawić parametry OSD i Autoppilota potrzebny jest sprawny tor radiowy czyli podłączony nadajnik i odbiornik wraz z monitorem. Wtedy korzystając z 3 przyciskowej klawiatury (lub przełącznika OSD w radiu RC) można wybrać i ustawić wybrane parametry w menu. Menu główne z nastawami jakie przyjąłem dla swojego modelu na początek Podmenu autopilota:
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Okazała się potrzebna jeszcze jedna regulacja. Po złożeniu skrzydeł i sprawdzeniu ustawienia ich względem SW. Okazało się, że występuje wzajemne przekoszenie linii natarcia. Dlatego musiałem pod jedną połówkę mocowania skrzydeł podłożyć podkładkę z 1 mmm sklejki - pomogło.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
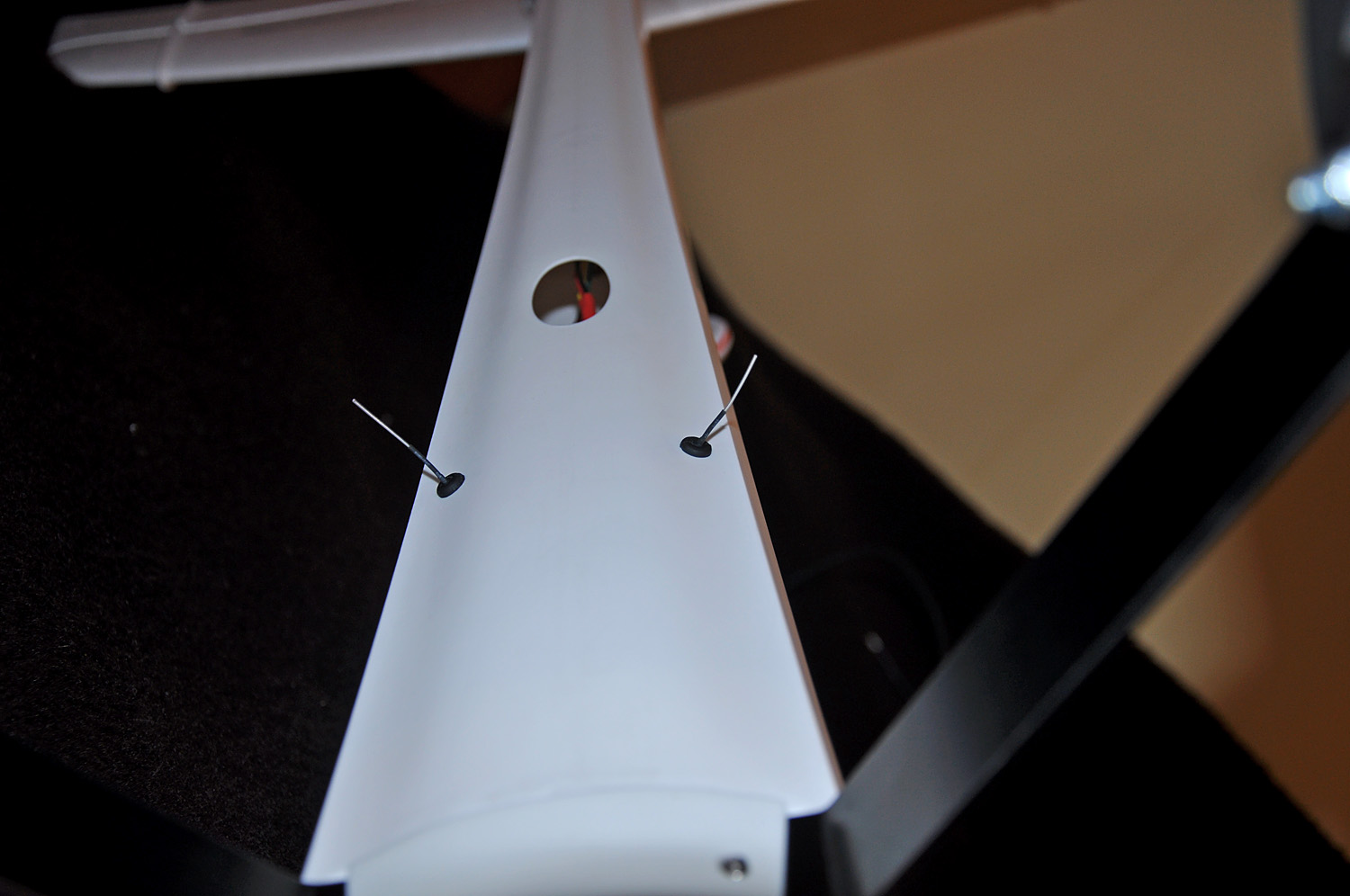
Wystawiłem jeszcze anteny odbiornika poza kadłub: Z reguły tego nie robię bo można uszkodzić końcówki ale tu chodzi o maksymalnie daleki zasięg, więc niech będzie bezpośrednia widoczność.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
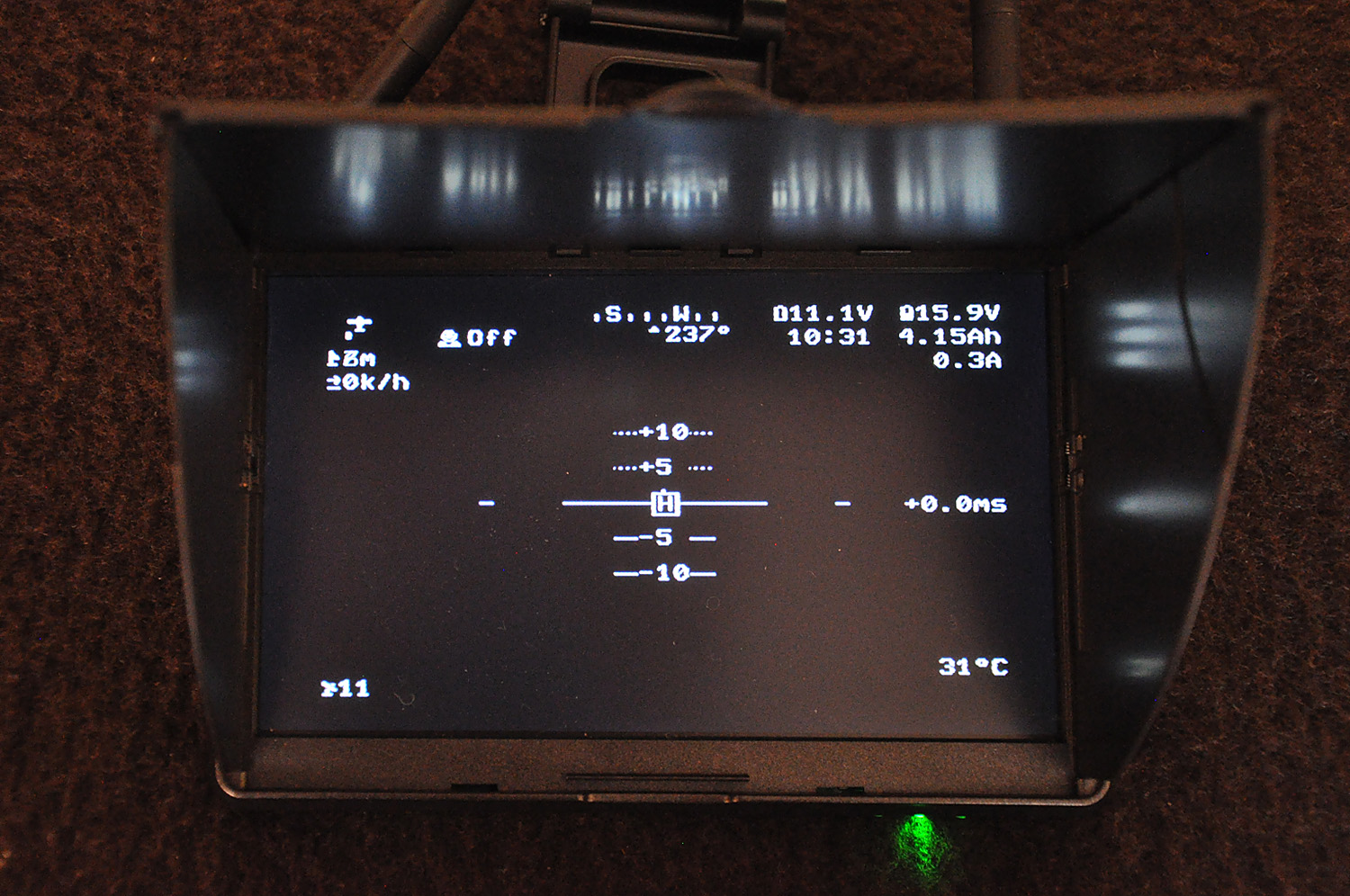
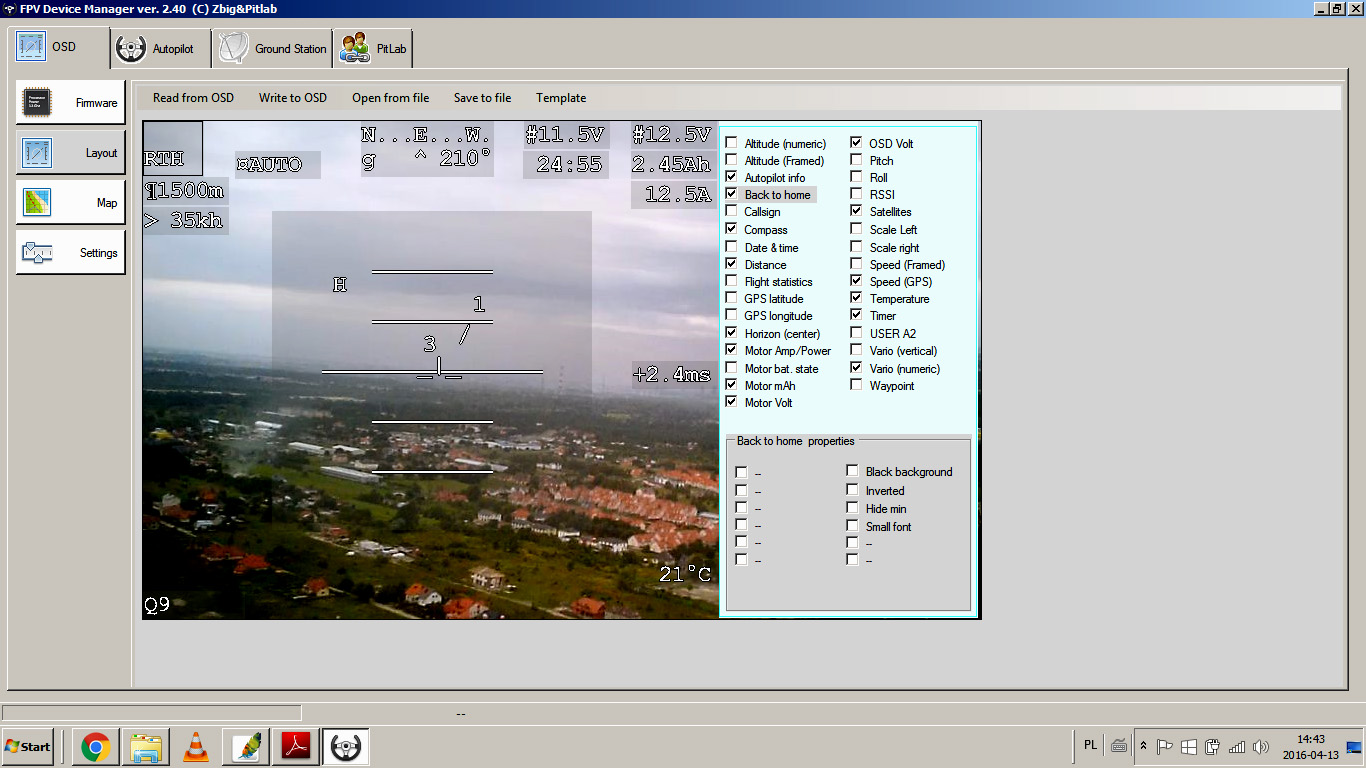
Dane z OSD wyświetlone na ekranie monitora: Jak napisałem ustawiłem do oblotu minimum informacji takich jak: ilość widocznych satelit 11 - b. dobry wynik jak na drewniany ocieplany dach prędkość wysokość i położenie modelu względem poz. Home status radia RC - wyłączone, kompas, parametry pakietów: napędowego i FPV wznoszenie, temperatura w pokoju - model w słońcu sztuczny horyzont.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Stosunek wagi do ciągu mówi mi tylko w tym modelu czy będę w stanie wystartować z trawy na kołach, w innych modelach czy będę mógł wykonać bezpiecznie akrobację. Zawsze wykonuję takie pomiary przed pierwszym lotem nowego modelu. Z tą głowicą to niezły pomysł (są nawet takie gotowe modele) muszę popatrzeć jak będzie pasowała - czyli jej okrąg do kadłuba. O takie rozwiązanie Ci chodzi ?
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
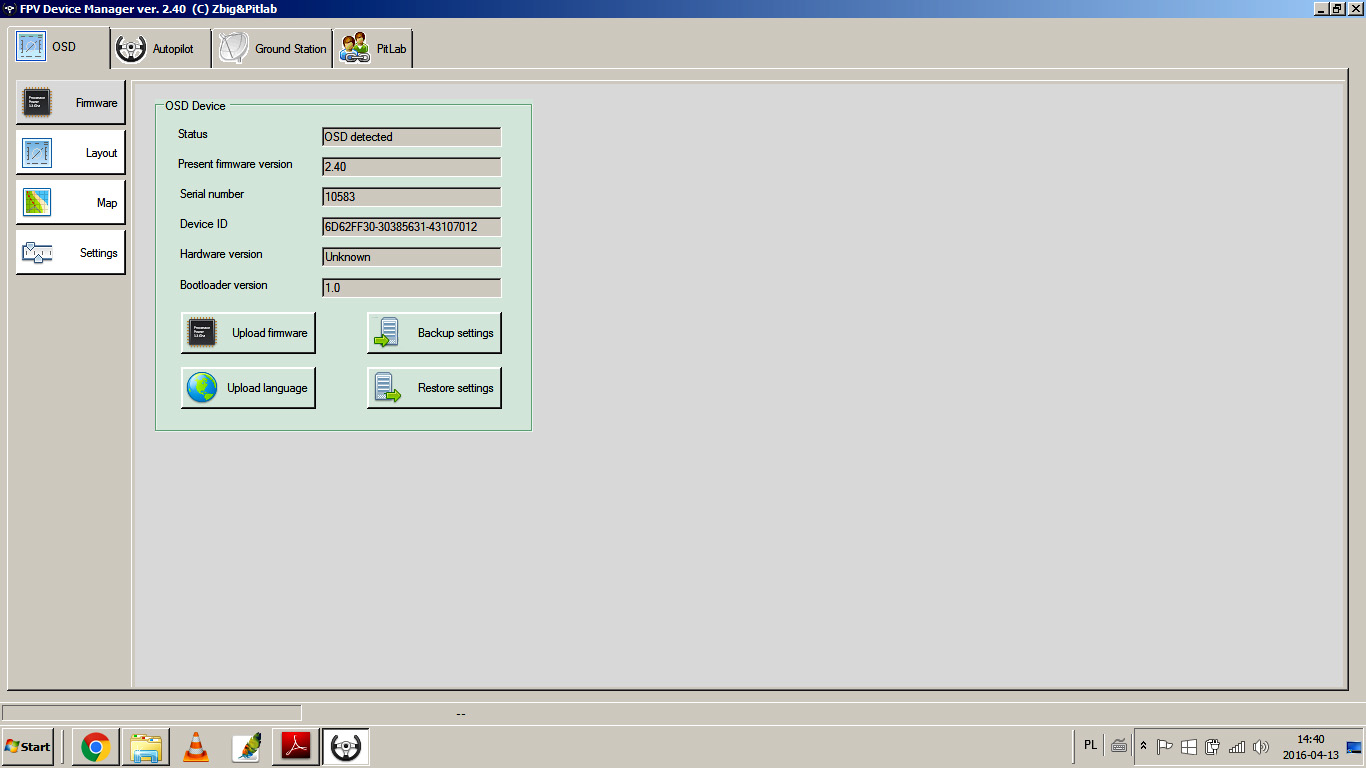
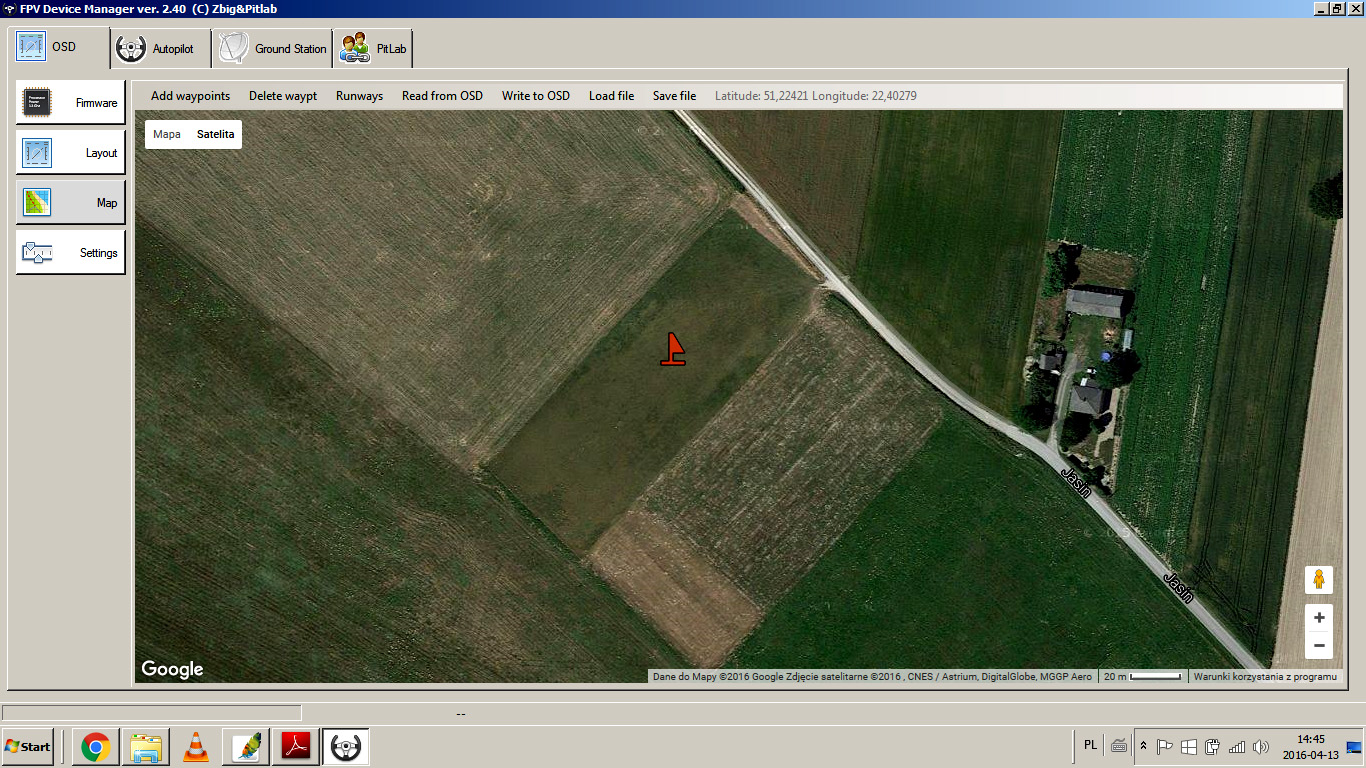
Moduł OSD Jest to spodnia część "kanapki" autopilota. Układ ten odpowiada za informacje o locie nakładane na obraz pochodzący z kamery. Informacje do wyświetlenia można wybierać i lokalizować w różnych położeniach na ekranie dogodnych dla pilota. Ażeby QSD współpracował z programem FPV Manager, całość "kanapki" musi być zasilona (5V autopilot + 12V np. pakiet 3S) a OSD podłączony do dolnego portu USB. Manager posiada kilka skonfigurowanych wstępnie ekranów, można też stworzyć własne i zapisać do pamięci układu i na dysk komputera. Ekrany te w zależności od sytuacji można też w locie zmienić torem RC. Drugą funkcją modułu OSD jest wyświetlanie i możliwość konfiguracji parametrów lotu modelu na monitorze FPV. Ażeby to uzyskać należy jednak mieć zapewnioną łączność radiową FPV. Ekran potwierdzający łączność z modułem OSD: Ekran OSD z możliwością konfigurowania parametrów lotu - na zdjęciu jest to skonfigurowany (uproszony) ekran dla pierwszych lotów Rangera. Ekran do budowy trasy lotu autonomicznego - zdjęcie naszego lotniska modelarskiego w Radawcu z zaznaczonym punktem Home.
-
Ranger EX 2.0 m z Volantex RC - relacja z budowy i lotów
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Stan modelu - przygotowany do oblotu: link do opisu: http://pfmrc.eu/index.php?/topic/60857-ranger-ex-20-m-z-volantex-rc-pitlab-relacja-z-budowy-i-lot%C3%B3w-krok-po-kroku/
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
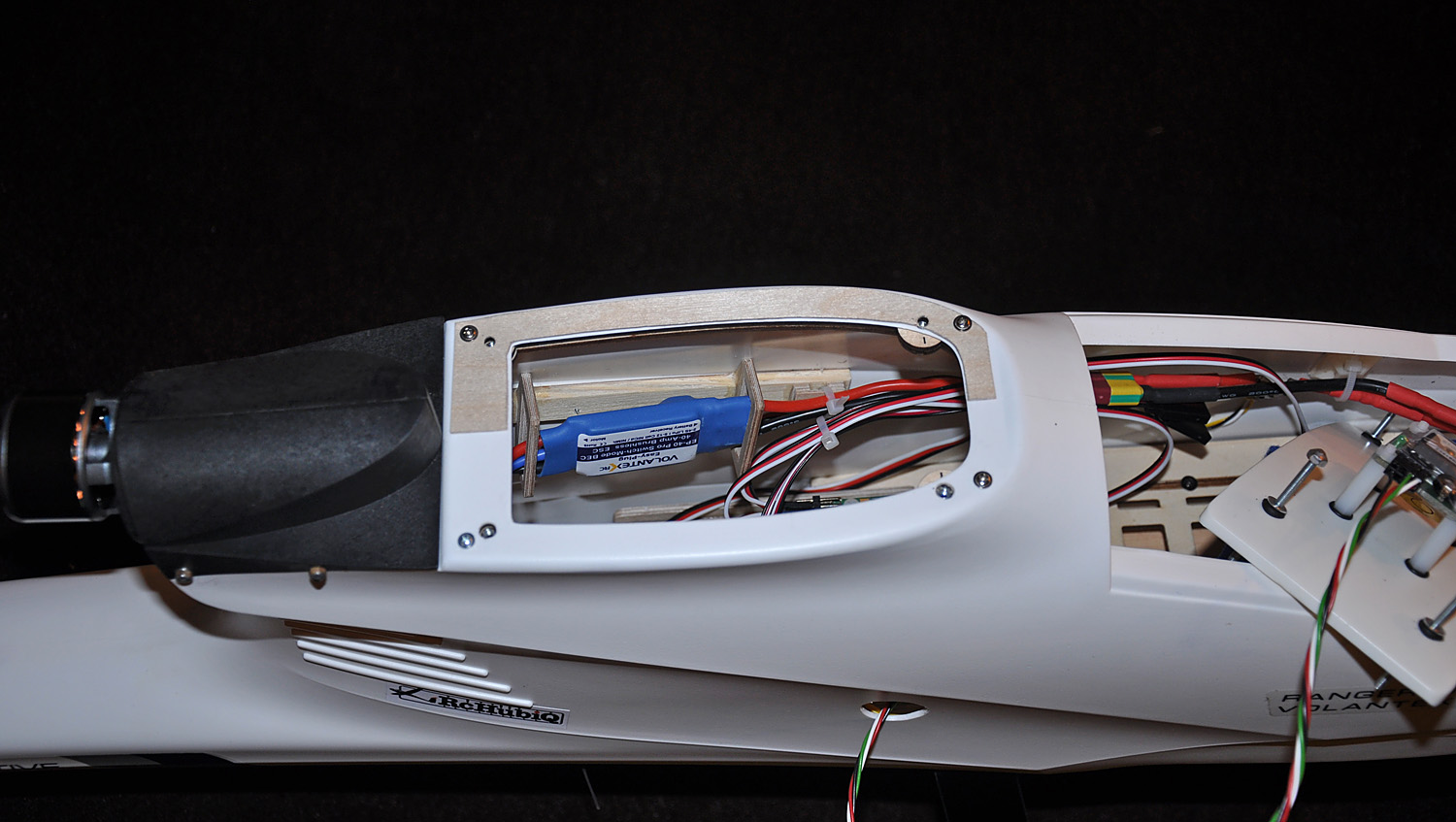
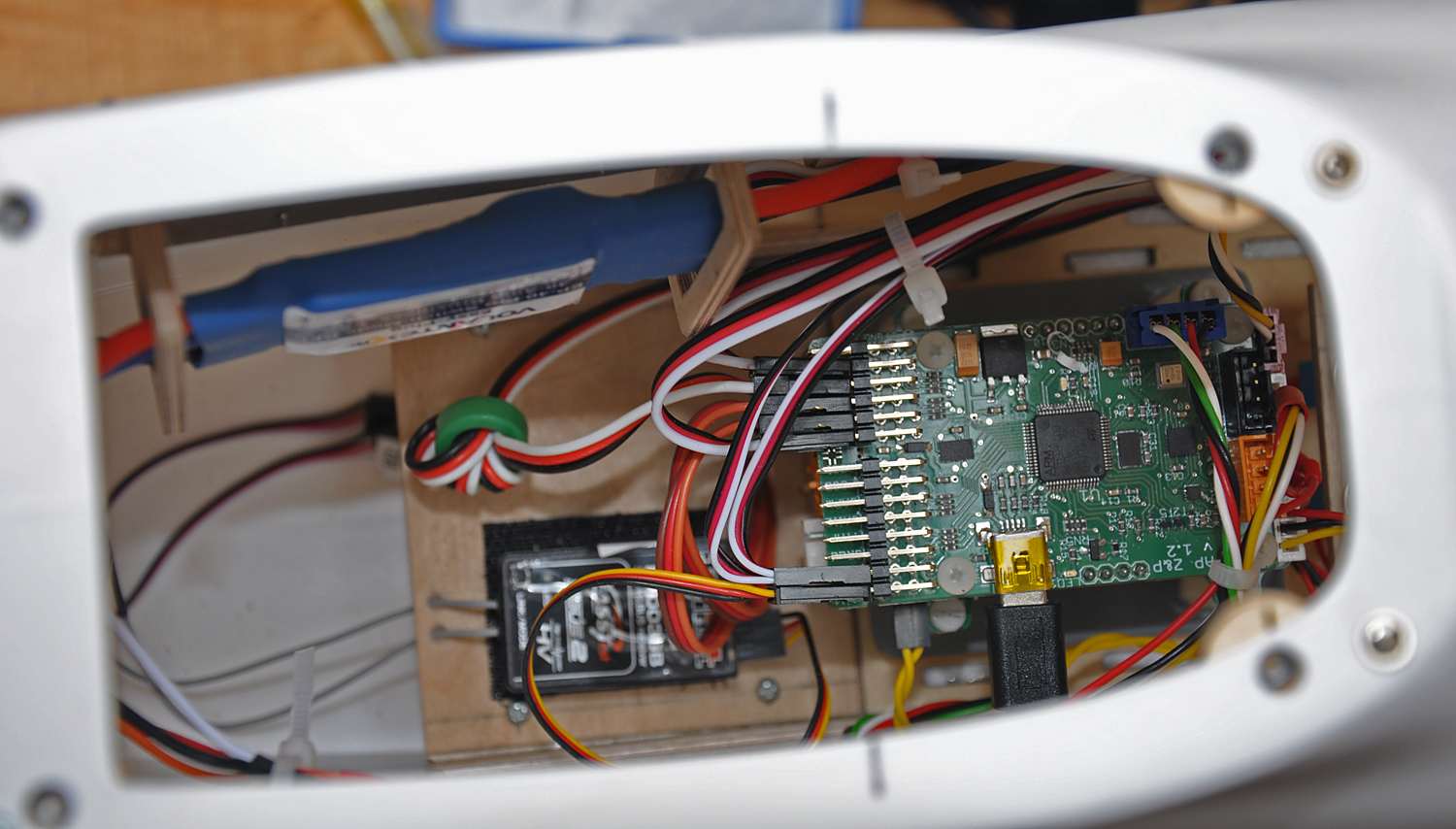
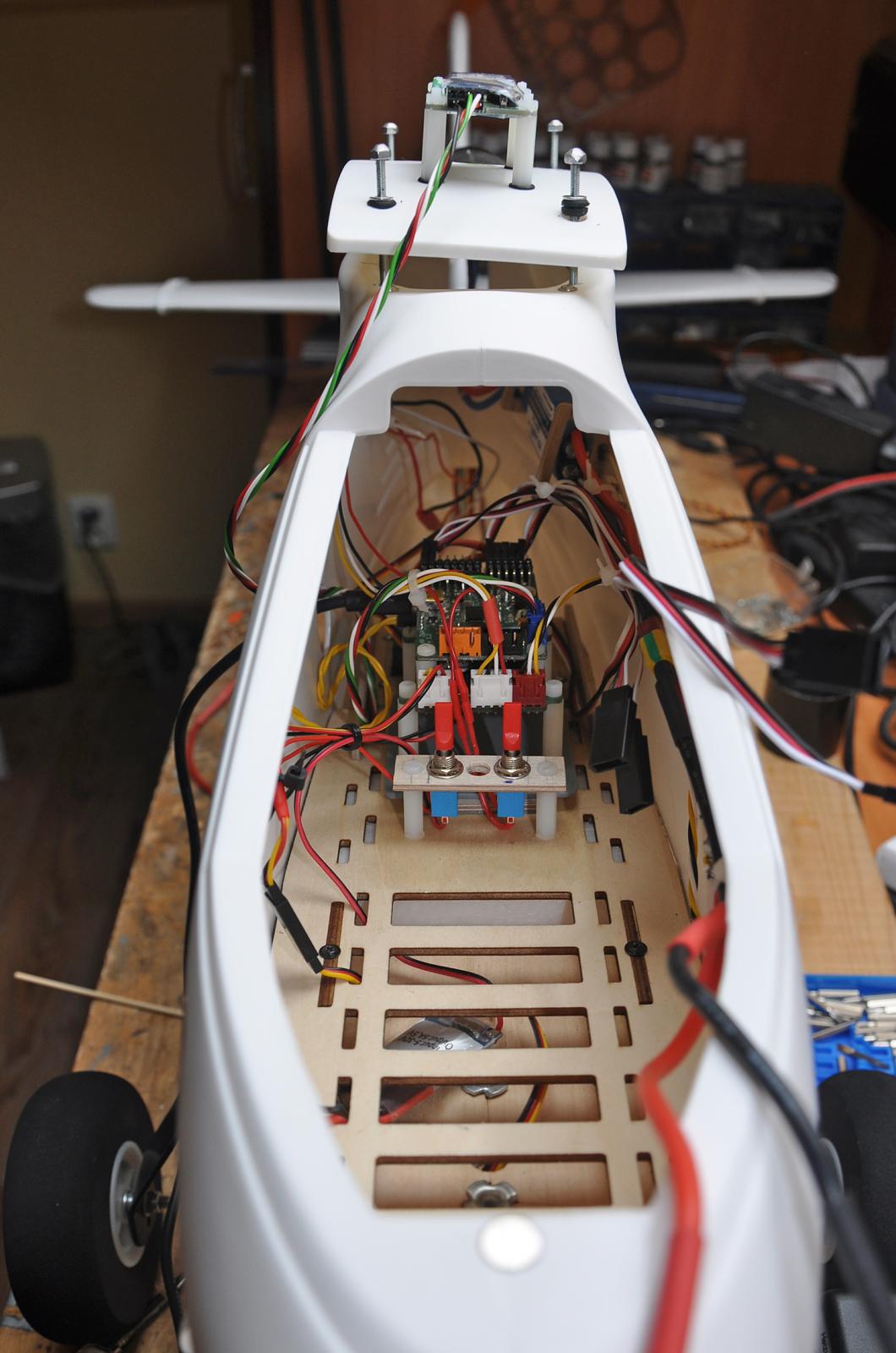
I rozłożenie elektroniki w modelu Dwa widoczne czerwono-niebieskie wyłączniki służą do wyłączania nadajnika FPV i kamery. Jeżeli lecimy zwykłym lotem np. szkoleniowym (ze stabilizacją lub bez) urządzenia te mogą zostać wyłączone. Wyłączenie samej kamery pozwala zapoznawać się ze wskazaniami OSD na czarnym ekranie co wygodne przy ustawianiu menu OSD na ekranie monitora.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
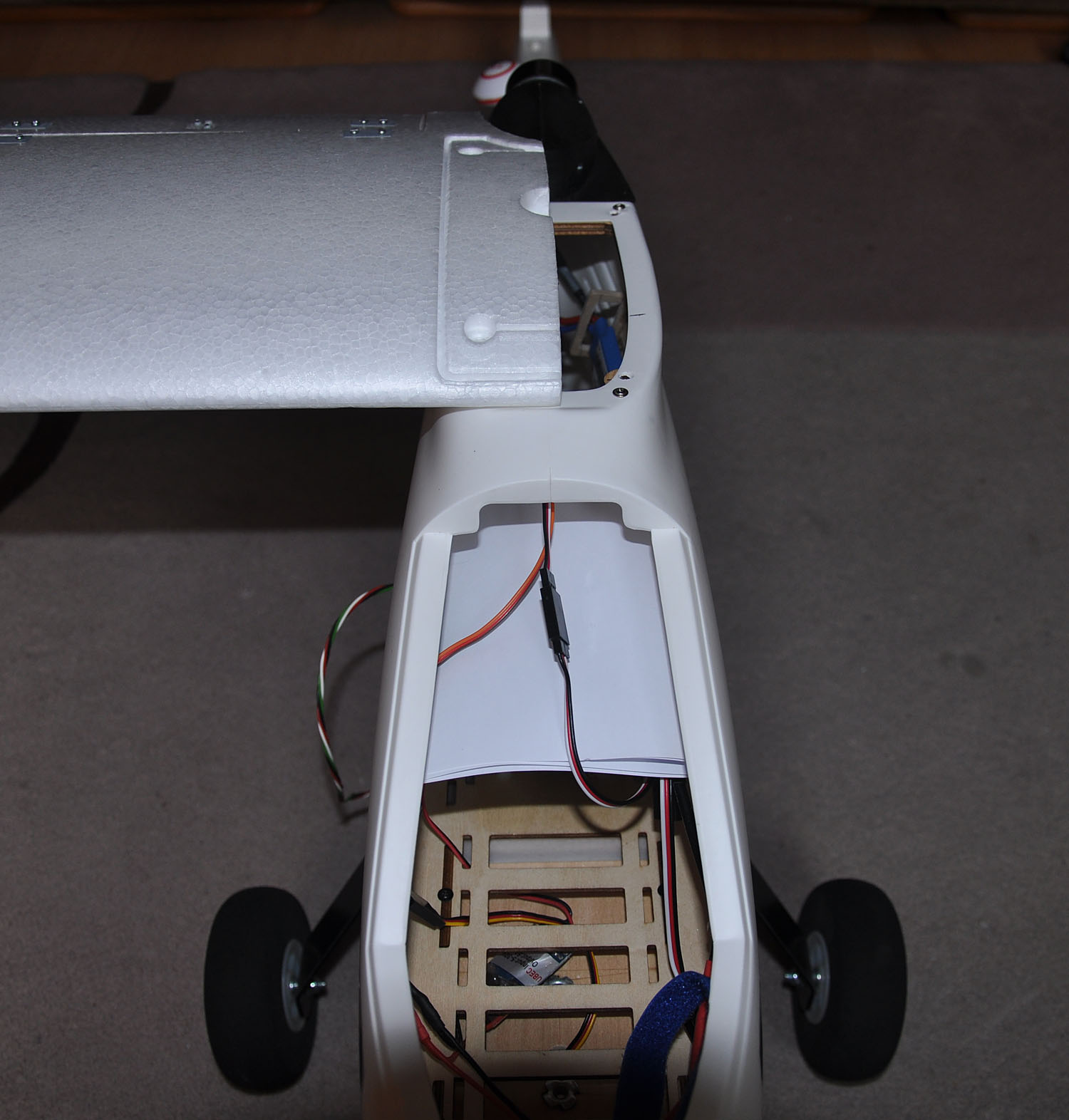
Teraz już wiadomo czemu w kadłubie modelu pojawił dziwny się otwór. Jest to dojście do portów USB Autopilota i OSD. A przy okazji kabel modułu GPS się załapał.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
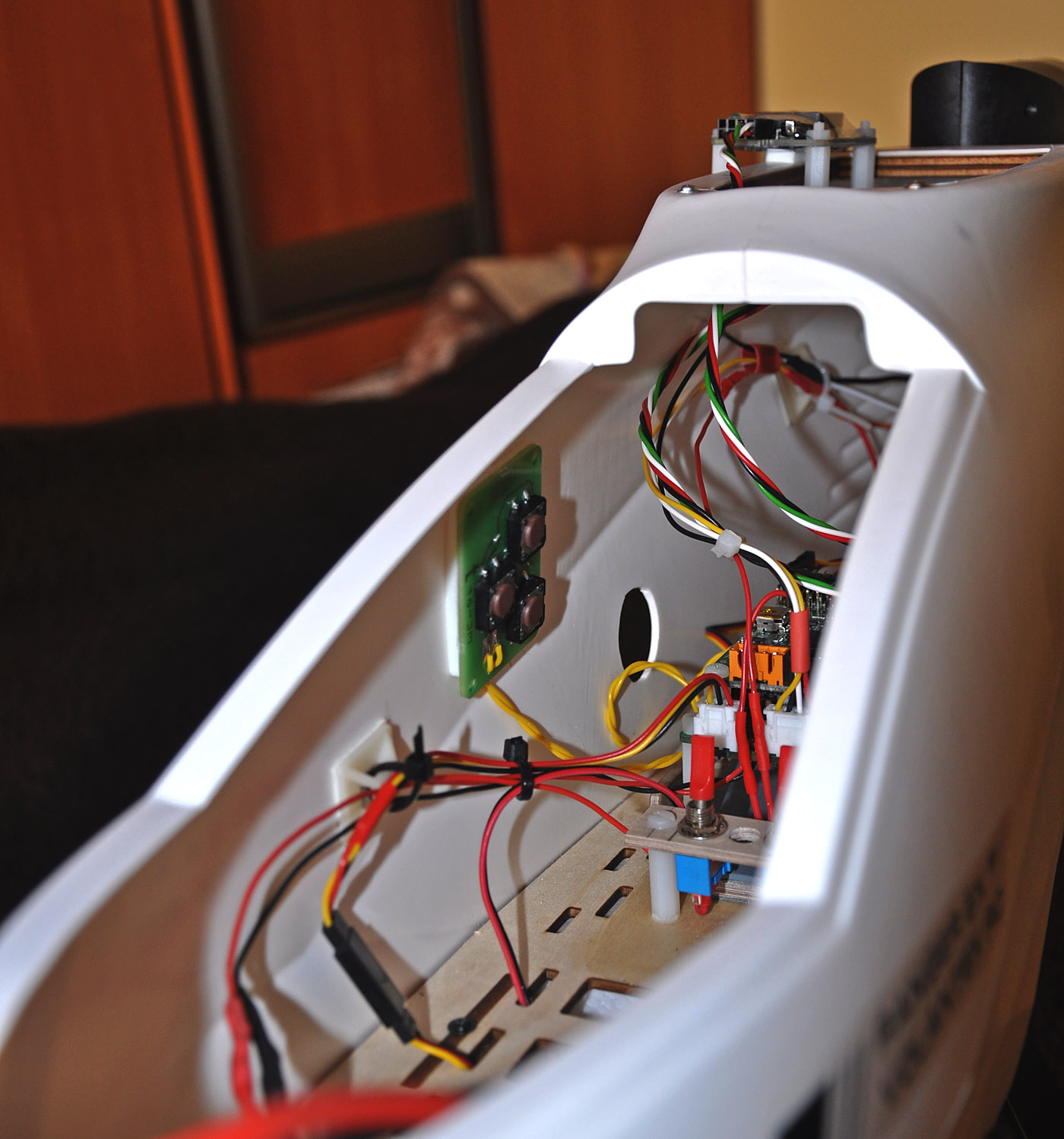
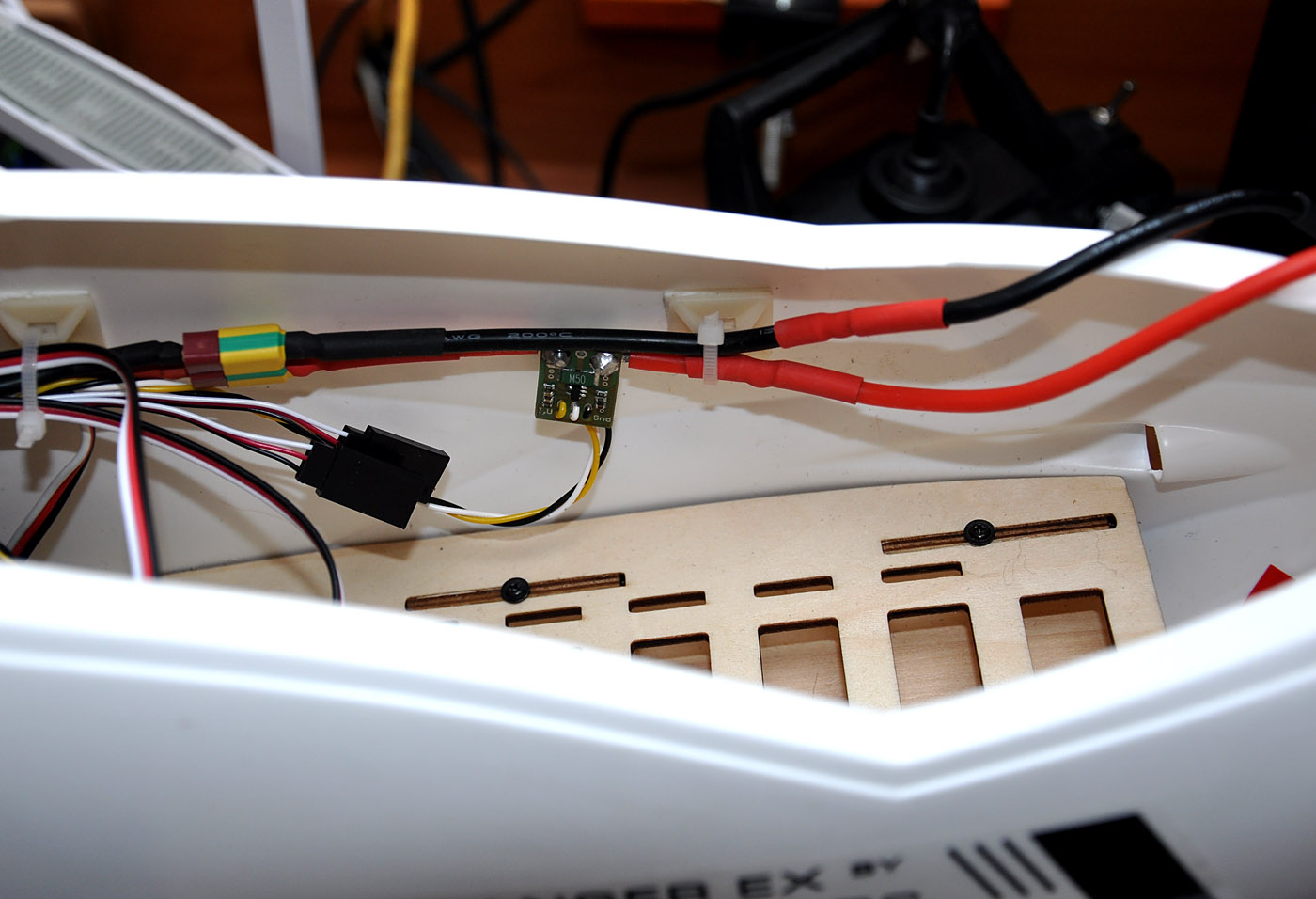
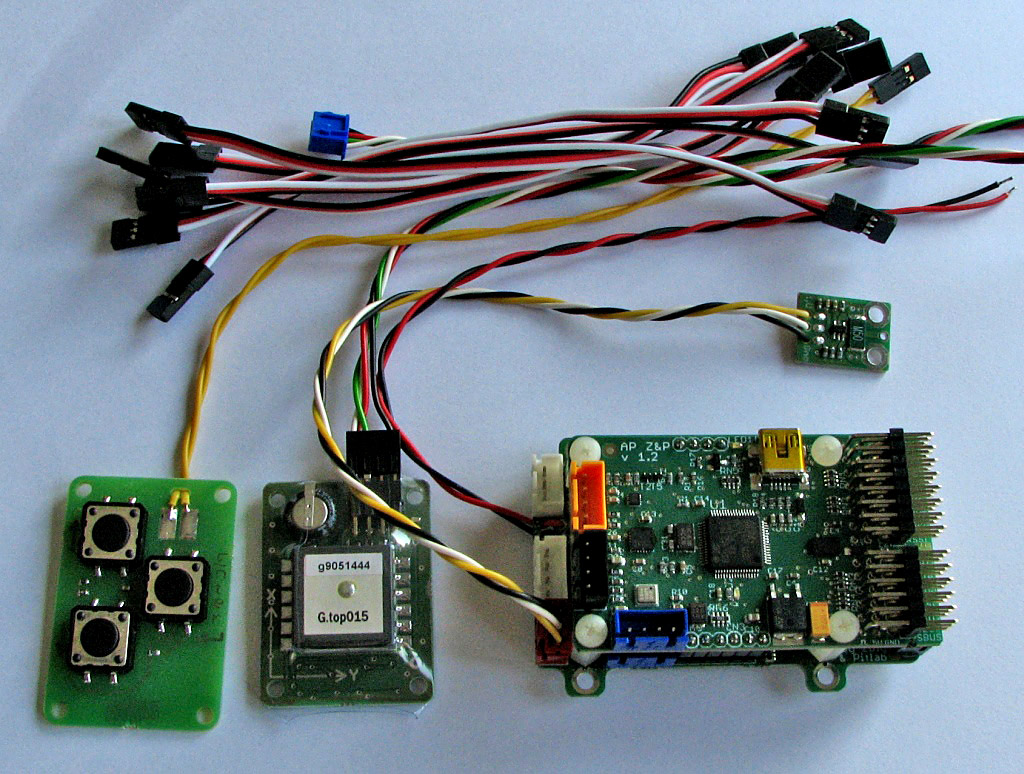
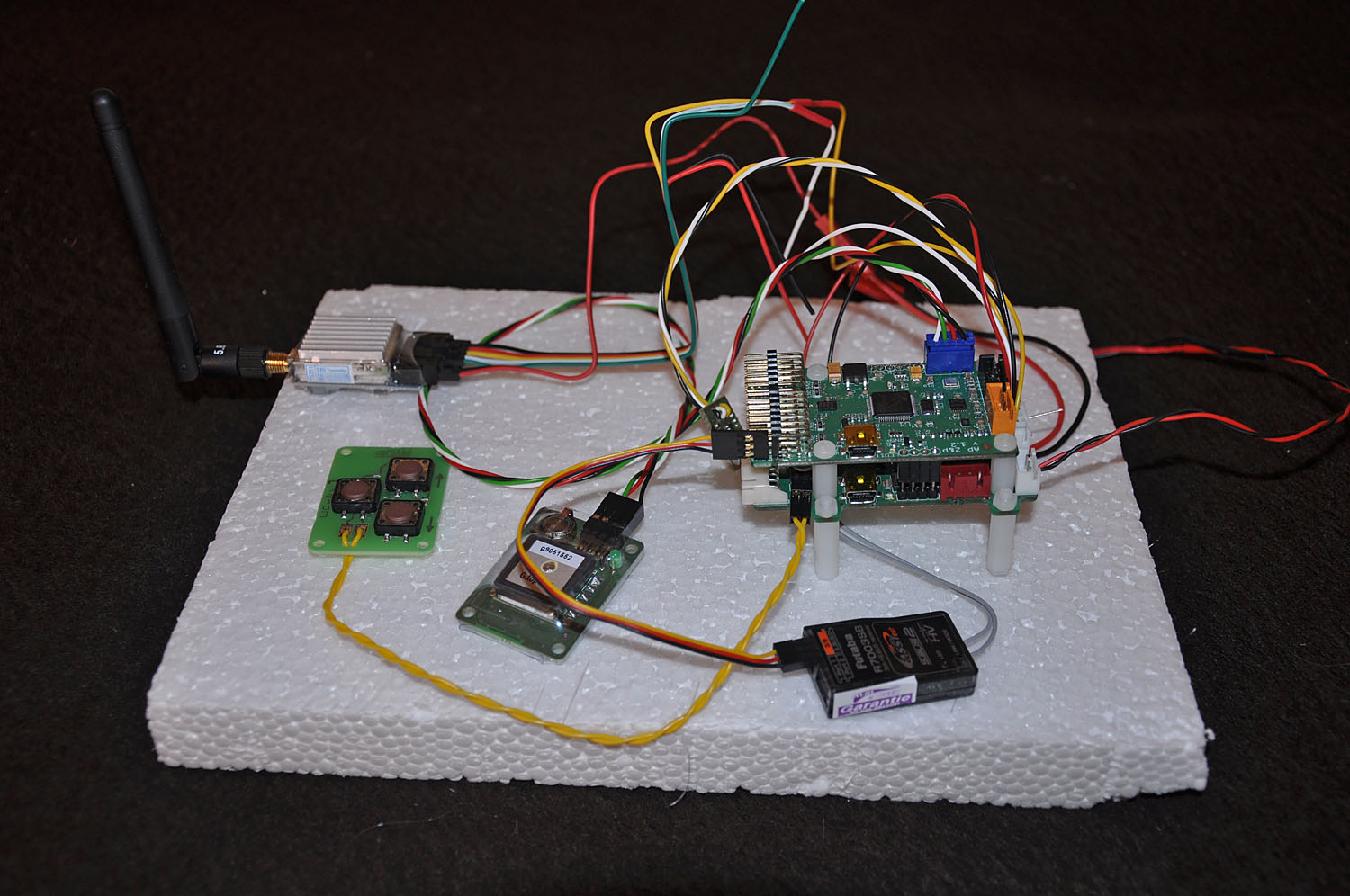
Elementy składowe autopilota: Elektronika autopilota składa się z dwóch zmontowanych płytek tzw. "kanapki". Górna płytka to właściwy autopilot, dolna to moduł OSD. Obie płytki mają wyprowadzone złącza USB osobno dla dolnej i górnej płytki. Konfigurując autopilota korzystamy z górnego złącza USB a dla modułu OSD przewidziane jest złącze dolne. Oprócz tego do zestawu dołączone są jeszcze: - moduł GPS z kompasem, barometrem i czujnikiem temperatury, który umieściłem w najwyższym puncie kadłuba - klawiatura do szybkiej konfiguracji menu OSD na pokładzie modelu - bardzo wygodna w użyciu, którą zamontowałem na bocznej ściance modelu. Konfiguracji OSD można wykonać również z poziomu nadajnika RC, ale nie jest to takie wygodne jak klawiatura w modelu i rozprasza trochę na początku uwagę. Sterowanie OSD z RC jest wygodne np. jest do szybkiej zmiany ekranów, których kilka można sobie przedefiniować - czujnik prądu pozwalający na monitorowanie pakietu napędu - napięcie pakietu, pobierany prąd aktualnie prąd, ilość zużytych mAh, i graficzny wskaźnik wyczerpywania się pakietu. Czujnik ten trzeba wlutować szeregowo samemu w przewód (+) z pakietu napędu. W zestawie otrzymujemy również komplet niezbędnych kabli do podłączenia odbiornika RC jak i kabli toru nadajnika i kamery FPV. Kable wielotykowiec posiadają odrębne kolory,które korespondują z ich gniazdami więc nie sposób jest się pomylić. Do zestawu dołączona jest mała podstawowa podręczna instrukcja ułatwiająca pierwszy kontakt z wyrobem. Pełne instrukcje Autopilota i OSD możliwe do pobrania ze strony producenta zawierają pełny tabelaryczny opis wszystkich funkcji pinów, sygnałów i napięć.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Są też tańsze 2m platformy EPP, Ranger rzeczywiście do tanich nie należy. Można kupić wersję Rangera KIT i powoli go wyposażać - aby rozłożyć wydatki w czasie - trochę mniej zaboli. Kiedyś były tańsze ale $ ......co zrobić Z kolei średni model konstrukcyjny ARF golas to też już podobna cena. Ale naprawdę ile ten model jest wart to okaże się dopiero po oblocie. A wędkarstwo również męskie hobby i też kosztuje. Rozmawiałem z wędkarzem nad Zalewem jak wymienił ceny tego co miał przy sobie .... -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Tryby lotu Autopilota Tryb lotu wybieramy trój-pozycyjnym przełącznikiem przypisanym u mnie w nadajniku RC do kanału 5. Przełącznik ten obsługuje trzy tryby lotu: Off - autopilot wyłączony i lot w trybie manualnym jak zwykłym modelem RC Stab - tryb stabilizacji, ale z możliwością pełnej zmiany toru lotu modelu z pulpitu aparatury RC Auto - lot autonomiczny po wybranych punktach na mapie, bez możliwości sterowania lotu z aparatury RC w trybie Auto w zależności od położenia drążka gazu model wykonuje trzy różne funkcje gaz na zero - powrót modelu do zapisanej pozycji Home gaz na 50% - lot po wybranych na mapie punktach trasy gaz na 100% - krążenie nad aktualnym punktem w trybie Auto autopilot sam dobiera potrzebną mu do lotu modelu moc - wymienione położenia przepustnicy są tylko komendą dla wykonania jednej z trzech funkcji trybu Auto. Drugim ważnym przełącznikiem jest trój-pozycyjny przełącznik OSD Menu podłączony w moim przypadku w nadajniku do kanału 7. Przełącznik ten służy do zdalnego wyboru menu OSD na ekranie monitora FPV. Nie używany przełącznik ten powinien stać w pozycji środkowej, aby nie wywoływać niepotrzebnie menu OSD. Jeżeli podłączymy prawidłowo odbiornik RC (wszystkie potrzebne kanały) to można prześledzić pracę kanałów sterowania, działanie przełączników Trybu Lotu i OSD menu. Jeżeli przełączymy tryb lotu w Stab lub Auto i odchylimy płytkę autopilota od poziomu to w prawym oknie Output Channels widać będzie reakcję stabilizatora na wychylenia autopilota. Reakcji takiej nie będzie w trybie Off. Te czynności konfiguracyjno-sprawdzające wykonujemy na stole przed włożeniem autopilota do modelu. Obsługa Fail Safe - przy utracie łączności z radiem RC. Ustawiamy ją tak aby odbiornik ustawił się na Tryb Auto i kanał gazu na zero. Spowoduje to powrót modelu do pozycji Home. Jeżeli model odzyska znowu zasięg RC podejmie takie działanie jakie jest ustawione na nadajniku, więc dobrze jest również nadajnik ustawić w tryb Auto i gaz na zero aby model kontynuował dalej powrót do pozycji Home chyba że zdecydujemy inaczej. Wyważanie modelu: Model dał się wyważyć zaplanowanymi pakietami bez problemu. Nie bardzo czaję o co chodzi. Ja swoje modele tak ustawiam, żeby latały poziomo niezależnie od wielkości gazu (oczywiście od pewnej mocy minimalnej zapewniającej lot poziomy w górę). Więc nie bardzo rozumiem co SW ma do tego ?
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Definiuje się minimalną prędkość poruszania względem ziemi i model stara się nie schodzić poniżej niej. Ja wybrałem sobie na razie najniższą ze względu na ekonomię pakietu. -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Witam Piotrze: Radio RC powinno mieć możliwość ustawienia odpowiedniej konfiguracji failsafe w nadajniku. Jest to wymuszenie trybu Auto (lot Autonomiczny) i wyzerowanie gazu - wtedy Autopilot potraktuje to jako komendę powrotu do punktu Home - tj. punkt startu. Będę jeszcze o tym wspominał w dalszej części opisu i oczywiście testował praktycznie. Przed lotem modelu - na lotnisku trzeba punkt Home wprowadzić do pamięci modelu. Choć wydaje mi się, że jeżeli będzie on zawsze stały to można wprowadzić go również wcześniej z mapy google - ale to jeszcze przetestuję. Po osiągnięciu punktu Home model krąży wokół niego - wtedy go przejmujesz przełączając odpowiednio tryb lotu. Nie wiem w tej chwili jak model zachowa się po przywróceniu łączności wcześniej przed p. Home - czy będzie dalej do niego wracał, czy przełączy się we wcześniejszy tryb. Ale mając już łączność RC można model zmusić w każdej chwili dalej do powrotu trybem Auto i gazem na zero. Kontrola względem powietrza - model dopasowuje tak prędkość, żeby lot odbywał się w poziomie wyznaczonym przez Min i Max dozwolonej wysokości i kontroluje prędkość przemieszania się względem ziemi poprzez GPS. Jeżeli wiatr jest silny, model zwiększa gaz, jeżeli nie może go pokonać to robi koło i próbuje jeszcze raz. Jak wiatr silniejszy od napędu modelu to pewnie odleci w siną dal robiąc próby powrotu. Ja to urządzenie mam pierwszy raz w ręku i jego zachowania dopiero będę sprawdzać praktycznie - a jak sprawdzę to podzielę się oczywiście swoimi uwagami. Dopóki nie sprawdzę sam staram się nie pisać. Dużo rzeczy znajdziesz pod linkiem: http://rc-fpv.pl/viewtopic.php?f=10&t=5022&hilit=PITLAB&start=0 i tam też jest to opisane tylko trzeba trochę poszukać bo wątek bardzo obszerny. Pozdrawiam Pioterek -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Pomierzyłem dzisiaj masę do lotu i ciąg statyczny napędu modelu: masa modelu w zaplanowanym wyposażeniu 2,84 kg (4S 4500mAh napęd i 3S 2200mAh FPV) statyczny ciąg napędu 2,11kg przy naładowanym pakiecie i prądzie max. 34,5 A śmigło 10x5 ciąg/masa=0,74 Przy połowicznym gazie ciąg napędu to 0,8kg a prąd pobierany 10A - widać, że napęd nie jest liniowy można to skorygować zmieniając odpowiednio krzywą gazu. -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
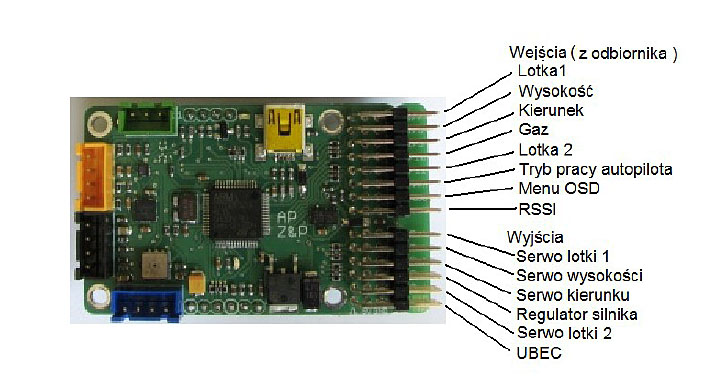
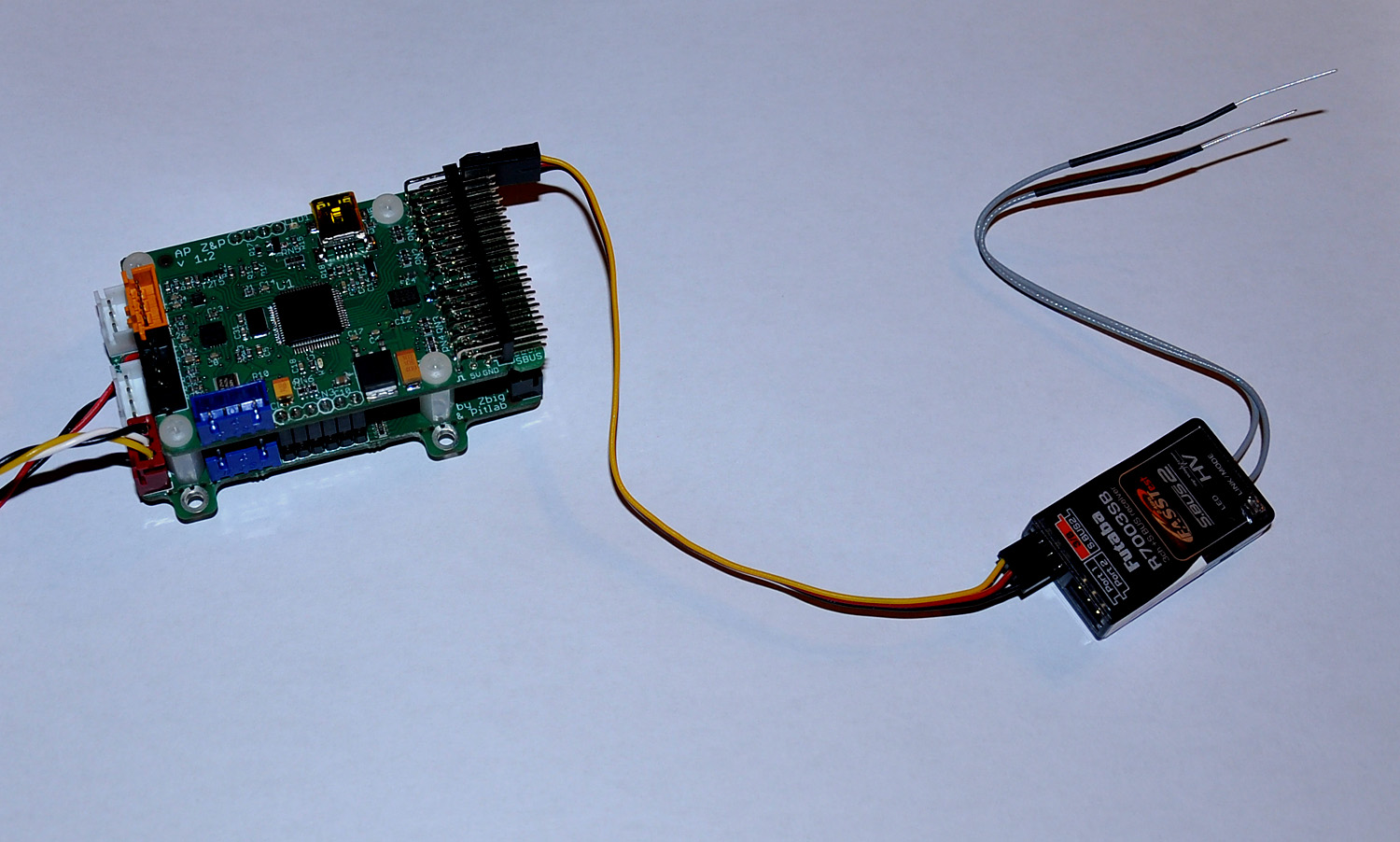
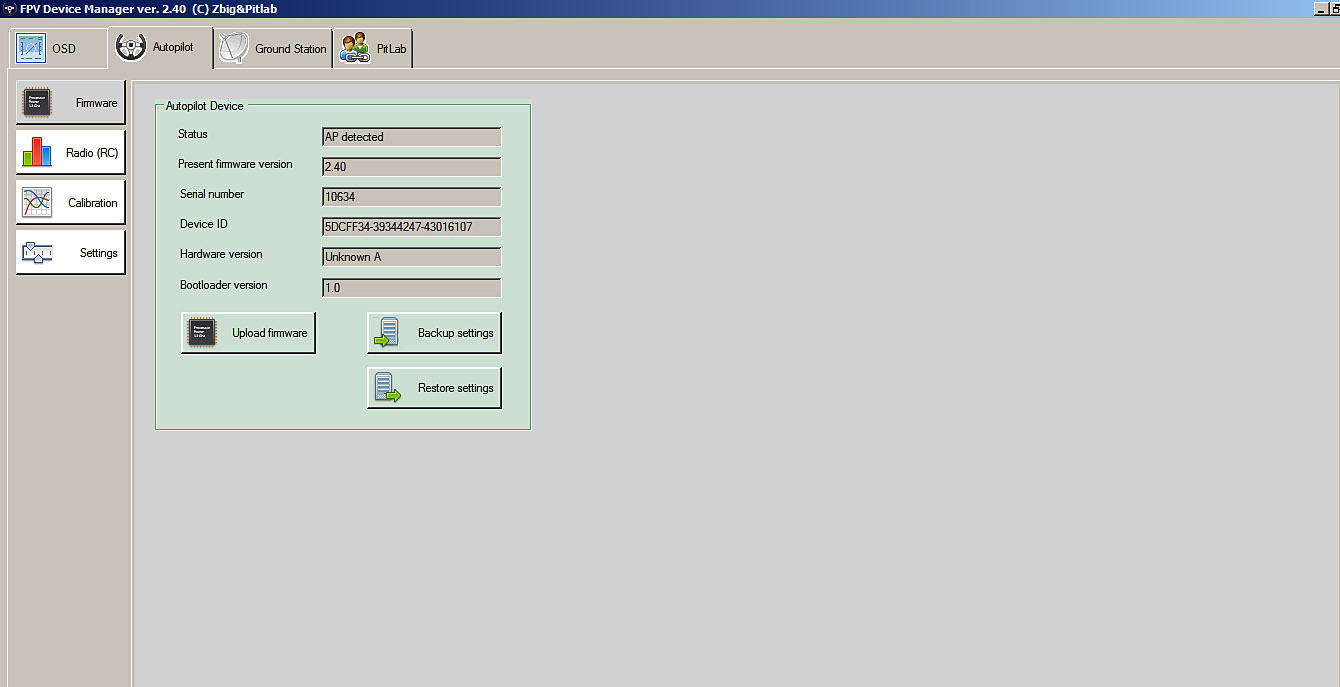
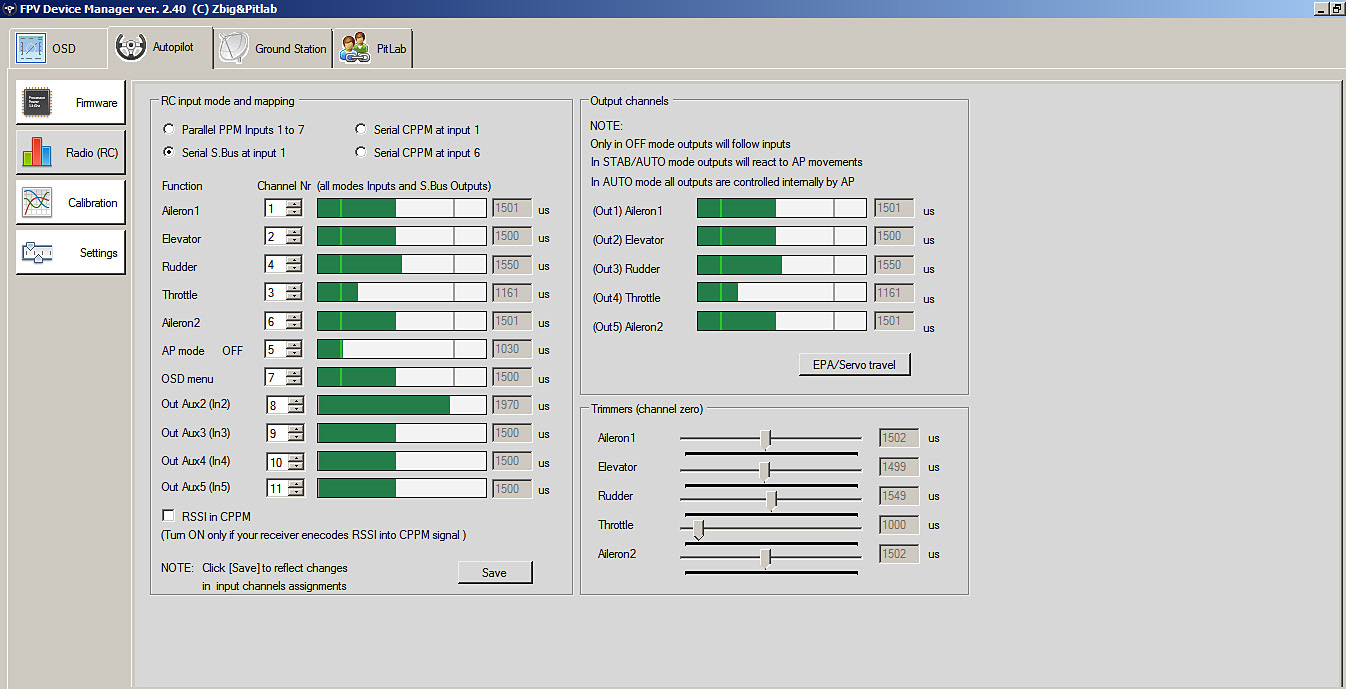
Podłączenie odbiornika do autopilota Bierzemy samą "kanapkę" autopilota, aparaturę RC + zasilanie 5V. Do sterowania modelem potrzebny jest miń 6 kanałowy a w przypadku sterowania klapami 7 kanałowy odbiornik. Jeżeli planujemy dodatkowo sterowanie pozycją kamery (góra dół i na boki) to potrzebne będę dodatkowe 2 kanały. Jeżeli chcemy mieć lotki sterowane osobnymi kanałami to jeszcze dojdzie jeden kanał. Czyli max. 10. Odbiornik z Autopilotem można połączyć na dwa sposoby: - tradycyjnie czyli równolegle, łączymy wtedy wszystkie potrzebne w sygnały z odbiornika z płytką autopilota przy czym sygnały „Tryb pracy Autoipilota” i „Menu OSD” wymagają obsługi przez 3 stanowe przełączniki. Dodatkowe planowane sterowanie jak np. klapy, obrót kamery czy światła modelu prowadzimy wprost z wolnych kanałów odbiornika z pominięciem płytki autopilota. - szeregowo jednym 3 przewodowym kablem poprzez wyjście CPPM lub SBUS Futaba o ile odbiorniki posiadają takie wyjścia. W tym przypadku możemy wykorzystać 4 dodatkowe wyjścia PWM Aux2-Aux5. Wyjścia Aux4 i 5 oferują zwiększona precyzję pozycjonowania serw. Jeżeli odbiorniki posiada wyście poziomu odbieranego z nadajnika RC sygnału RSSI można je również połączyć, będzie ono wówczas wyświetlane na ekranie monitora OSD. Ja wykorzystałem w modelu 18 kanałowy pełno-zasięgowy miniaturowy odbiornik Futaba FassTest R70003SB, który podłączyłem z autopilotem przez wejście CPPM - (wariant 1) w systemie SBUS Futaba. Więcej o samym odbiorniku pisałem: http://pfmrc.eu/index.php?/topic/33573-futaba-14sg-moje-do%C5%9Bwiadczenia/page-5 p. #83 Do dalszej pracy z autopilotem potrzebny jest program FPV Manager 2.4, który podobnie jak cała pozostała dokumentacja możliwa jest do pobrania z firmowej strony PITLAB. http://www.pitlab.pl/system-fpv/do-pobrania.html Komunikacja autopilota z programem odbywa się poprzez dwa złącza USB osobne dla Autopilota i modułu OSD. Po podaniu zasilania 5V do Autopilota i podłączeniu jego USB do komputera, urządzenie zainstaluje wymagany sterownik. Możemy teraz uruchomić FPV Managera który zgłosi się ekranem: Wybieramy zakładkę Radio RC i w lewym górnym w górnym oknie wybieramy sposób komunikacji odbiornika RC z Autopilotem. Jeżeli komunikacja jest poprawna ruchy drążków nadajnika widoczne są poprzez przesuwające się w poziomie paski odpowiednich kanałów. Po lewej stronie mamy sygnały z odbiornika po prawej sygnały wychodzące z Autopilota. W lewym oknie przyporządkowujemy funkcje poszczególnym kanałom. Muszą one odpowiadać ustawieniom nadajnika. Zdjęcie ekranu przedstawia wybraną konfigurację dla mojego Rangera EX
-
Cessna 337 Skymaster 206cm
Pioterek odpowiedział(a) na TeBe temat w Konwersje spalin na elektryki i elektryczne "giganty"
Te konkretne kołpaki na zdjęciach są lekkie i z racji dobrego wykonania nie mają bicia lub jest niezauważalne - nie ma drgań napędu. Zresztą bicie lekkiego kołpaka to nie jest jeszcze taki problem, gorzej jak ciężki kołpak jest niewyważony wtedy napęd nieźle drga. Nie wiem czemu, ale kołpaki aluminiowe odlewane ciśnienioiwo i toczone wymagają jeszcze wyważania. Spalina ma z reguły ma niższe obroty, przy elektryku to się nasila. -
Cessna 337 Skymaster 206cm
Pioterek odpowiedział(a) na TeBe temat w Konwersje spalin na elektryki i elektryczne "giganty"
Kołpaki metalowe z mojego doświadczenia wymagają wyważania. Do elektryków praktyczniejsze są kołpaki plastikowe z ażurowaną podstawą aluminiową.
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Ponieważ ostatnie lata pracowałem w handlu, to mi się wyrobił taki nawyk, że kontakt osobisty jest najważniejszy. Ale jak sklepy internetowe ignorują e_maile i zamówienia to oczywiście ich strata. A jakiś czas temu ja też do Ciebie pisałem e_maile, dzwoniłem i nic..... -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
To mamy trochę inne doświadczenia: Z Nastikiem kontaktuję się bezpośrednio z właścicielem P.G.Stokłosą, bo jak stały klient z reguły próbuje coś negocjować z ceny lub dogadać szczegóły techniczne. Kontakt z PITLAB z P.Piotrem Laskowskim bardzo dobry - dzwoniłem kilka razy z pytaniami - zawsze kompetentnie, rzeczowo i od ręki. Nie lubię pisać handlowych e-mali, dlatego ustalam sprawy najpierw słownie, dopiero potem potwierdzam ew. ustalenia e_mailem. Dane imienne dostępne są stronie sklepów. -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
I chyba nie najleiej zrobiłeś, Pitlab-a masz pod nosem. -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
PITLAB - Autopilot z OSD Dane i motto o firmy zaczerpnąłem z jej strony internetowej: http://www.pitlab.pl/firma-info.html "Firma istnieje od 2005 roku. Została zbudowana własnymi środkami od zera. Na początku było ciężko, bo obciążenia samego ZUS-u pochłaniały 60-80% zysku młodej firmy, jednak wytrwała praca zwykle po 14 godzin dzienne, bez tracenia czasu na dojazdy robi swoje, systematycznie przybywało projektów i zwiększały się obroty. Zaczynając zamawiałem po 20-50 mikrokontrolerów kosztujących po 4zł, na tyle tylko pozwalał mi budżet, ale po 2 latach mogłem już kupić 1000 sztuk i zlecić montaż automatyczny. Pierwszy duży projekt jakim był SkyAssistant pochłonął 4 lata pracy i o mały włos nie zakończył się katastrofą gdy zagraniczna konkurencja rozpoczęła walkę o ochronę swojego rynku donosząc na dystrybutora że prawdopodobnie wprowadza sprzęt bez badań. Aby móc spełnić wymagania unijne trzeba było przeprowadzić kosztowną certyfikację. Samo badanie urządzenia radiowego kosztowało 14 tysięcy nie dając żadnej gwarancji pozytywnego zakończenia testów. Z jedną poprawką udało się zaliczyć ten test i od tej pory rynek europejski był już dla mnie otwarty. Po mniej więcej roku pracy spłaciłem koszty badań i mogłem zacząć zarabiać. Dzisiaj tyle się mówi o tym że Unia wspiera innowacyjne projekty. Ze swojej strony mogę powiedzieć że być może kogoś wspiera, ale z każdego ściąga podatki i nakłada rygorystyczne obciążenia. Jeżeli chciałbym unowocześnić swój wariometr musiałbym po raz kolejny wydać te kilkanaście tysięcy złotych. Rezultat jest taki że na niszowym rynku to nie jest uzasadnione ekonomicznie. Nie korzystam i nie planuję korzystać z żadnych dotacji i programów wsparcia, ponieważ uważam że pieniądze z zewnątrz w długiej perspektywie działają negatywnie na rozwój zmniejszając dyscyplinę finansową oraz zadłużając firmę. Zamiast tracić czas na pisanie bzdurnych wniosków wolę ten czas poświęcić na rozwój i usprawnianie organizacji firmy, bo to będzie procentowało przez długi czas. Misją firmy jest rozwój społeczności modelarskiej od strony technologicznej. Dzisiaj dajemy hobbystom rozwiązania, na jakie do niedawna nie było stać nawet wojska dysponującego niewyobrażalnie większym budżetem. Jestem przekonany że ta działalność podnosi kulturę techniczną na wyższy poziom." Był taki czas w moim życiu zawodowym, że zajmowałem się również techniką mikroprocesorową tworząc własne urządzenia od podstaw i dobrze wiem ile godzin i wysiłku trzeba włożyć w system mikroprocesorowy, a do tego taki specyficzny bo lotniczy. Dlatego cieszę się, że Polskiej firmie udaje się utrzymać na rynku, pomimo totalnego zalewu chińszczyzny. Dla mnie to był jeden z powodów, że sięgnąłem po zestaw PITLAB. Ale przeglądając forum FPV natrafiłem na inny argument konkretnego użytkownika tego systemu a brzmiał on mniej więcej tak: Zwaliłem model z wysokości ok 100 m - moja wina, wysłałem niedziałającą "kakapkę" PITLABA do naprawy. Po tygodniu wróciła sprawna, kosztowało mnie to 10 zł + przesyłka. Myślę, że gdyby stało się to z zestawem Chińskim, musiałbym sobie go kupić drugi raz. http://pfmrc.eu/index.php?/topic/41509-wyb%C3%B3r-autopilota-i-osprz%C4%99tu-fpv/ p.#5 I tu jest cała siła PITLABA - wsparcie. Do tego 24 miesięczna realna gwarancją producenta i 80 stronicowa dokumentacja ze zdjęciami i rysunkami. Oprócz bardzo dobrze napisanej dokumentacji i rozwijanego ciągle software dostępnego na stronie producenta, doskonały kontakt z firmą i opis rzeka na forum FPV. pod linkiem: http://rc-fpv.pl/viewtopic.php?f=10&t=5022&hilit=PITLAB&start=0 można tu znaleźć całą historię rozwoju produktu od 2011 roku, z wieloma jak nie wszystkimi możliwymi pytaniami użytkowników. Jeżeli coś zepsujemy sobie sami, zwalimy model w powietrzu lub nie będzie wiadomo co zrobić z konkretnym problemem, jest gdzie się zwrócić po informacje i ew. naprawić nasze cudeńko. W dodatku PITLAB przychodzi do nas w pełni skalibrowany. Cena urządzenia - w stosunku do bogatych oferowanych możliwości i jakości działania uważam że jest adekwatna - nie wygórowana. Jest to cena przeciętnego modelu ARF, a przecież kupując taki model nie zastanawiamy się wiele nad jego ceną - bo kupujemy oczami . To co siedzi w modelu i nim steruje jest o wiele ważniejsze niż sam model, bo jeżeli sterowanie zawiedzie tracimy często wszystko. Przed włożeniem wszystkich podzespołów do mojego modelu oczywiście sprawdziłem cały system na stole i na osiedlu (łączność FPV). Na tym etapie mogę powiedzieć, że wszystko działa w 100% zgodnie z opisem. Sprawdzałem też na sucho działanie Autopilota - czyli reakcje sterów na wychylenia modelu. W następnym wejściu jak to wszystko podłączyć. Ranger coraz bliżej oblotu: Nie wiadomo tylko po co ta dziura w boku modelu
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Elektronika modelu: w dalszej części: dlaczego PITLAB ? z czego się składa i jakie tryby oferuje jak to podłączyć PITLABA do radia RC przykład rozmieszenia elementów w modelu RANGER EX pomiar ciężaru modelu i ciągu statycznego napędu jak przygotować i sprawdzić model do oblotu i lotu w trybie Auto
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
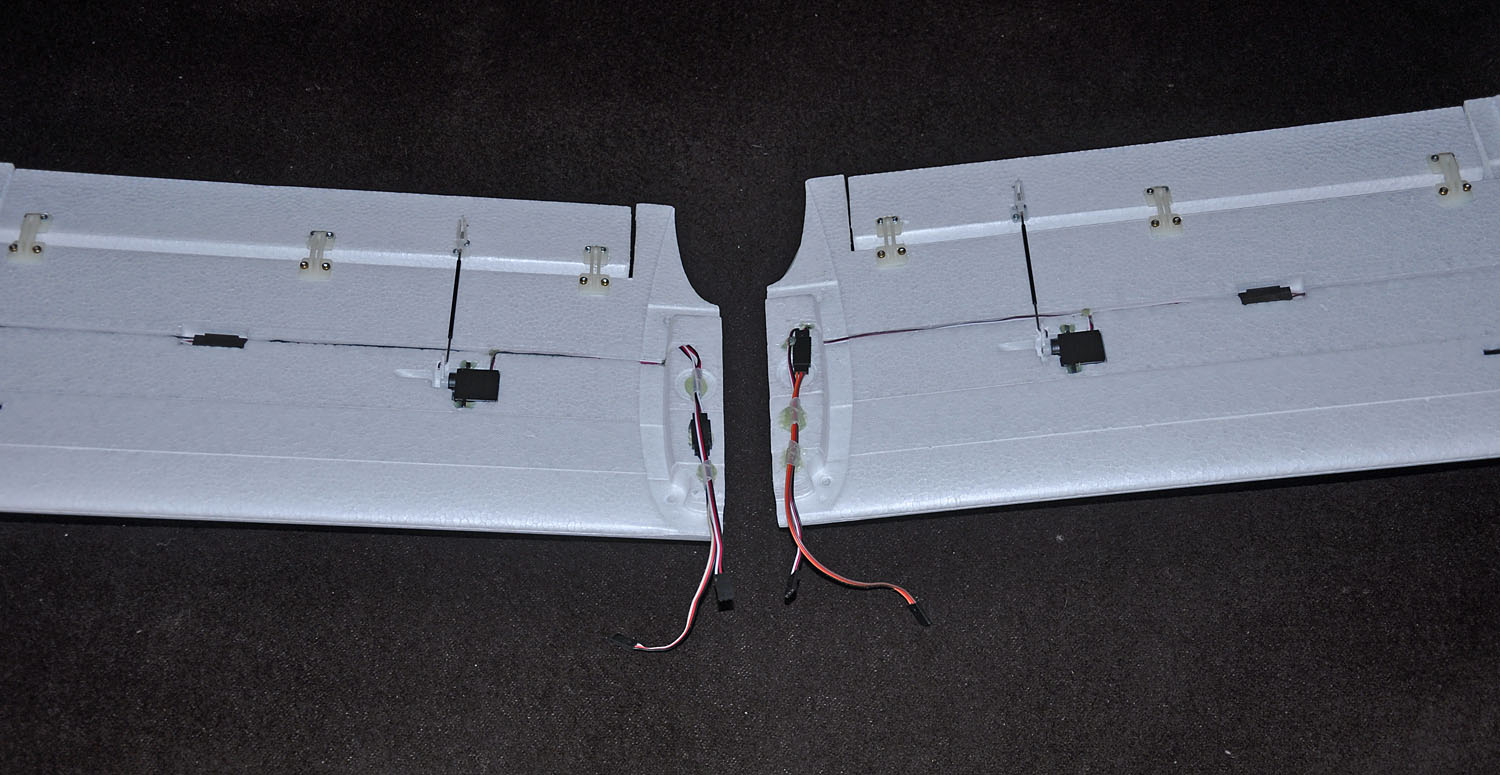
Wyprowadzenie kabli skrzydeł. Skrzydła osadzane są na modelu z góry i po ich zamocowaniu na modelu wymagają podłączenia 4 wtyków do serw lotek i klap. Widziałem próby odwrotne, czyli najpierw łączenie długich kabli a potem osadzanie skrzydła - jest to niewygodne trzeba balansować z długim skrzydłem w ręku i pilnować aby nie wyszarpać przy okazji kabli. Jeżeli model ma wysokie podwozie to jest jeszcze trudniej bo nie można położyć skrzydła na trawie obok modelu wzdłuż nie mając odpowiednio długich kabli. W moich skrzydłach łączenie przewodów odbywa się w kabinie modelu. Skrzydła po zamontowaniu "podają" swoje końcówki do kabiny a tam już łatwo je połączyć. Prowadzenie kabli po skrzydłach - mocowanie "gorącym" klejem Łączenie kabli w kabinie modelu
-
Ranger EX 2.0 m z Volantex RC - relacja z budowy i lotów
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Dzięki za uwagi, ten model spodobał mi po prostu się wizualnie. To są początki mojego FPV i jeżeli mi się to spodoba to pewnie będę poszukiwał dalej. Interesuje mnie autonomiczność lotów modelu stąd pierwszy etap to tylko (i aż) 3 km bo taki mam zasięg radia RC więc będzie w razie co model na uwięzi.☺ Więcej informacji będę przekazywał w miarę zdobywania doświadczenia.