Poli25
-
Postów
98 -
Rejestracja
-
Ostatnia wizyta





-
Witam, Mam problem z łódką zanętową podłączoną do APM-a. Łódka nie chce płynąc do wcześniej wybranych punktów płynąc w trybie LEARNING, jednym słowem płynie gdzie chce za każdym razem w inną stronę. Jak zadam płyń do w aplikacji Carp pilot to 3 razy na 5 dopłynęła do wybranego punktu. Co jest nie tak?. Parametry sprawdziłem już 100 razy, nic nie odbiega od normy w ustawieniach kolegi MAXIII. Ktoś miał podobny problem?
-

Parametry anten odbiornika frsky rxsr i podobnych. (ipx4)
Poli25 odpowiedział(a) na maxiiii temat w Odbiorniki RC
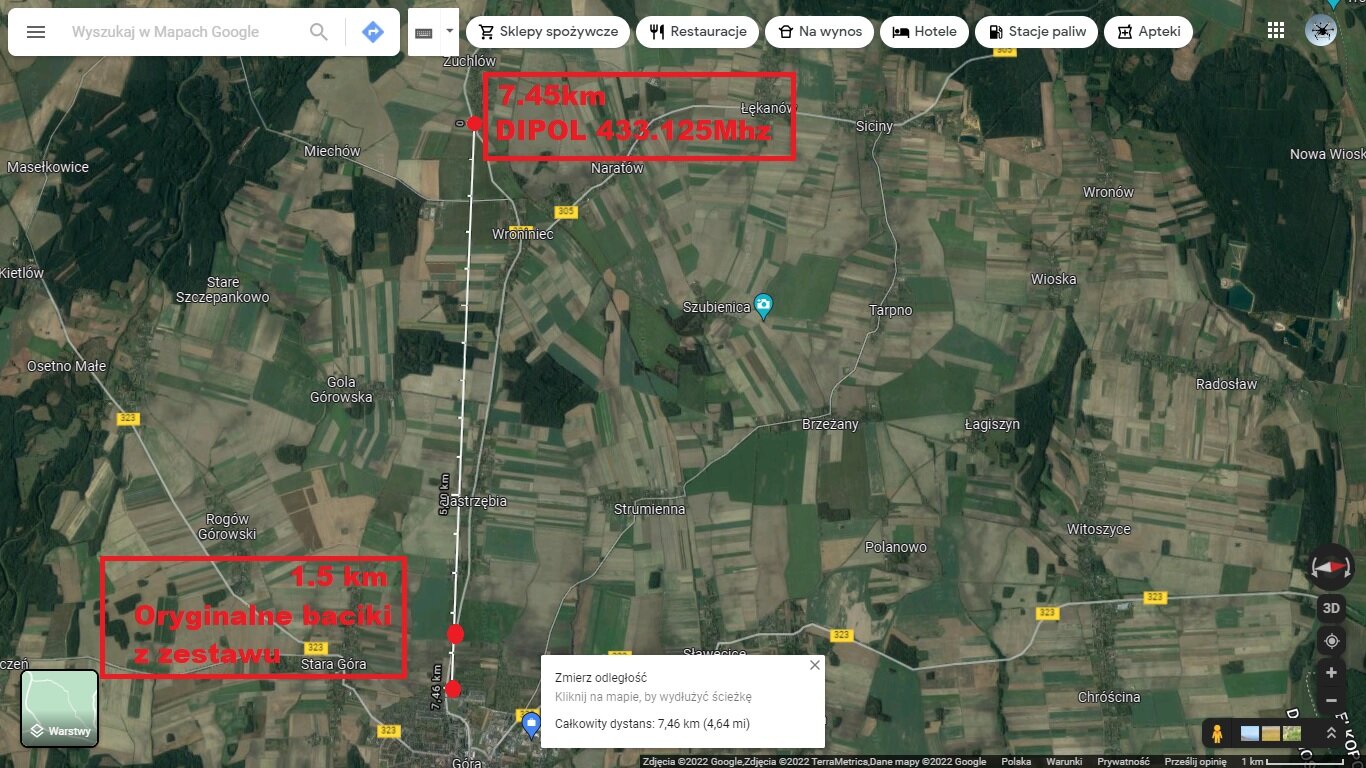
Jak wcześniej zapowiadałem. Tworząc nowy moduł telemetrii dalekiego zasięgu 1 W na 433 Mhz postanowiłem przetestować anteny od kolegi MAXIIII. Na początek poszły anteny które są dołączane do telemetrii przez chińczyka - zasięg 1.5 km. Kolejne które postanowiłem przetestować do dipole strojone na 433.125 Mhz, zasięg jaki wyszedł to 7.45 km, RSSI na poziomie 60 %. Warunki do testu także nie były idealne, po drodze miałem trochę i las który widać na zdjęciu. Jeśli znajdę lepszą miejscówkę do testów zrobię kolejny test zasięgu. Moduły telemetrii obecnie są w fazie testów, docelowo bedą posiadały wbudowane akumulatory oraz łączność przez bluetooth.
-
Parametry anten odbiornika frsky rxsr i podobnych. (ipx4)
Poli25 odpowiedział(a) na maxiiii temat w Odbiorniki RC
Do mnie dzisiaj przyszły antenki od maxiiii. Antenki testuję do telemetrii, jak na razie bija na głowę wszystkie inne które wcześniej testowałem. O końcowych efektach moich testów poinformuję forumowiczów. -
Gotowy do malowania po lądowaniu awaryjnym
-
Witam po długiej przerwie. W końcu ulotniłem swoje B2, ale długi okres nielatania spowodował spore problem z ujarzmieniem bestii, doszło do przeciągnięcia i szybkie lądowanie. Poniżej film
-
Witam,W wolnej chwili postanowiłem odpalić racer-a 250 na Omnibus F4V3 przeprogramowanego na Ardupilota.Wszystko działa tzn dron wznosi się ale jest mały problem z GPS i Kompasem. W trybie Loiter dron nie trzyma pozycji ani wysokości mimo że GPS łapie satelity a HADOP wynosi 1.6 więc powinien stać w miejscu.Ktoś miał taki problem?
-
Wykonałem test z przysłonięciem od przodu, okazało się że ciąg statyczny pozostaje taki sam.
-
Sprawdziłem właśnie nowy silnik SUNNYSKY X2826 1080kv Ciąg 3100g śmigło 11.55 Prąd 53,3A Moc 741W Ciag 1800g śmigło 10.5 Prąd 35,2A Moc 505W
-
A jak skompilować pliki z rozszerzeniem .h i .cpp? w arduino?
-
OK, tylko jak skompilować np kompas lub barometr mając pliki.h i.cpp? Ale dobrze mnie naprowadziłeś
-
Witam, Czy jest ktoś w stanie opisać jak kompilować pliki do hex z repozydium arduino https://github.com/ArduPilot/ardupilot/tree/master/libraries
-
Na zdjęciu które wysłałeś jest śmigło 10x5, obecnie założyłem 11x5,5 a bedę chciał sprawdzić jeszcze 11x7. Na upartego dało by radę włożyć śmigło 12"
-
A że tak głupio zapytam, co to jest to bullnose? Kolega Maxiiii ma też tak zabudowane śmigło i lata bez problemu
-
Tak jak wcześniej pisałem, wykonałem hamownię. Między wagą a podstawą jest stopka z kleju na gorąco a ja widać na zdjęciach w górnej części jest blokada aby ramię nie przekręciło się w drugą stronę.
-
No więc tak, zrobiłem testy na hamowni wg Maxii-go było znacznie lepiej na śmigle 10x5 1900 g na 11x55 2250g ciągu,