TomTech
-
Postów
331 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez TomTech
-
Airboat drukowany na drukarce 3D
TomTech odpowiedział(a) na temat w Poduszkowce i inne pojazdy o dziwnym
Muszę sprawdzić ale to dopiero w przyszłym tygodniu. Ja mam drukarkę prus i3 rework na ramie drewnianej wzmocnionej ceownikami alu. -
Airboat drukowany na drukarce 3D
TomTech odpowiedział(a) na temat w Poduszkowce i inne pojazdy o dziwnym
Cieszy mnie to. Ale na obecną chwilę brak czasu, na remont drukarki i poustawiania wszystkiego niby drukuje ale co pare tak około 3-4 mm słabo się ze sobą sklejają warstwy. Jak naprawię drukarkę i będę miał pewność że działa poprawnie to się odezwę. -
Możesz przybliżyć zasadę tej prądnicy nie zdradzając za wiele? 90 procent to wiele.
-
Airboat drukowany na drukarce 3D
TomTech odpowiedział(a) na temat w Poduszkowce i inne pojazdy o dziwnym
Tak samo się stosowało turbinkę Kowalskiego maluchu, najlepsze efekty były gdy się spolerowało kanały. Ale i tak jesteście wielcy budujecie wspaniałe łódki, czytam i czekam na relacje z pływania a potem na plany bo coś wspaniałego tworzycie. Pozdrawiam i kibicuje -
Ja zawsze szukam od początku gdzie jest zwarcie wylutuj ten uszkodzony kondensator i zobacz miernikiem czy nie ma zwarcia.
-
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Ja też gdzieś miałem te pliki z strony Alexa tylko wszystko prawdopodobnie przepadło szukałem ich dla Marka, to co miałem wysłałem. A jeszcze przyszło mi na myśl aby tą stronę otworzyć w może będzie możliwość pobrania plików. -
To jest kondensator. Odlutuj go i zobacz czy nie robi zwarcia, uległ pewnie uszkodzeniu w czasie wypadku mogła się zmienić wtedy polaryzacja zasilania. Mam kilka serw w których wymieniłem spalone kondensatory i działają prawidłowo.
-
Airboat drukowany na drukarce 3D
TomTech odpowiedział(a) na temat w Poduszkowce i inne pojazdy o dziwnym
Ja jestem zainteresowany planami bo frajda jest z budowania a potem z pływania. Mam kilka wałów jak jesteś zainteresowany to jutro mogę je pomierzyć i zdjęcia porobię. -
Airboat drukowany na drukarce 3D
TomTech odpowiedział(a) na temat w Poduszkowce i inne pojazdy o dziwnym
Mirek możesz pokazać jak ten model 90 będzie wyglądał? a czy podzielisz się planami jak mnie zainteresuje? -
Dalej jak na 200m nie miałem jak pływać.
-
Ja anteny montowałem na płasko jedną a druga wystawała po za kadłub w stosunku do pierwszej i zasięg jaki sprawdziłem to około 500m model i nadajnik na wysokości około 0,5m sprawdzałem na działce na ziemi więc przeszkody to krzaki i drzewa.
-
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Ja nie zauważyłem różnicy przód tył. Jest też wersja smd do pobrania z archiwum elektroniki praktycznej to nie będziesz musiał kombinować z programem. Teraz jeszcze czytałem opis i tam jest napisane że do tyłu 50% więc teraz już sam nie wiem na samym silniku nie widziałem różnicy. A może będzie to można zmienić w bascomie? -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Ja nie rysowałem to jest oryginalne wykonanie AVT kiedyś wydali wersje przewlekaną a potem unowocześnili do wersji smd, ja tylko z tych plików BRD eagle co Ci dałem (wersja przewlekana) zrobiłem wydruk na termo transfer i tyle. -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Nie w eagle nie mam niestety. Pochwal się potem jak Ci wyszło. -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Schemat https://ep.com.pl/files//2493.pdf -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Zainstaluj program eagle BITY low 0xE4 hig 0xD9 regulator dwukierunkowy 2pcb FINAL2 reely.brd regulator dwukierunkowy final 1pcb.brd AVT5190_x4.pdf AVT5190regulator dip.pdf AVT51901_TOP.pdf AVT51901_TOP_MIRROR.pdf -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
A tak wygląda jeden który zrobiłem.
-
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
AVT5190 przewlekany.rar AVT5190 przewlekany.pdf -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Z tego co pamiętam to na stronie ATV był też listing. Opisany w Elektronice Praktycznej czerwiec 2009r. a tu link do pdf. z opisem http://dl.btc.pl/kamami_wa/avt5190.pdf -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Mam dwa zbudowane AVT5190 i tam można ustawić neutrum (od jakiego do jakiego zakresu wychylenia drążka). Na ich stronie są dwie wersje stara w technologii przewlekanej i nowsza w smd i to tylko ta różnica, ja mam w wersji przewlekanej. -
Regulator PWM (szczotka ) i schematy dwukierunkowy.
TomTech odpowiedział(a) na Marek_Spy temat w Regulatory
Zobacz avt5190 kit wsad i wzory płytek dostępne w sieci na stronie AVT, jak znajdę to wyśle Ci schemat i wsad na pic. -
Airboat drukowany na drukarce 3D
TomTech odpowiedział(a) na temat w Poduszkowce i inne pojazdy o dziwnym
Mirek ciekawy ten kadłub masz może plany do niego? -
Gimbal został skalibrowany, tylko jest komunikat nie wiem co oznacza ktoś coś wie?
-
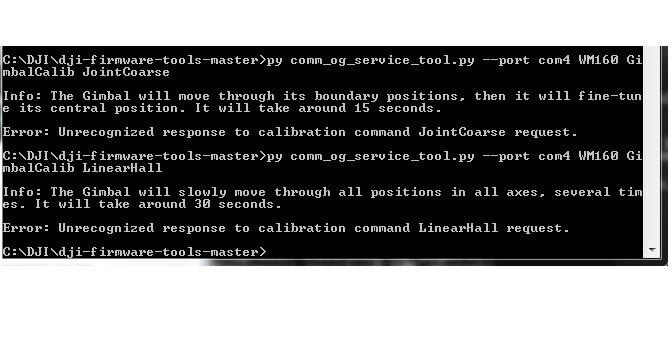
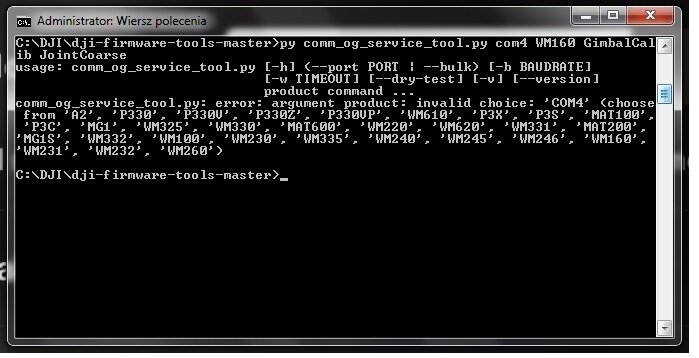
A teraz mam kolejny problem. Czy ktoś kalibrował gimbala za pomocą komputera tak jak w tym poradniku https://znowodronach.pl/kalibracja-gimbala-w-dji-spark. Przy wpisaniu pierwszej komendy ( py comm_og_service_tool.py com6 SPARK GimbalCalib JointCoarse ) wyskakuje jak na zdjęciu. Czy będziecie łaskawi i pomożecie, co robie nie tak? Dziękuje za każde rady.
-
Proszę ten post skasować.