maxiiii
-
Postów
2 111 -
Rejestracja
-
Wygrane w rankingu
9






-
Ile kosztowała instalacja? I ile lat temu. Chce przeliczyć na moje warunki.
-
A ile wynosi amortyzacja fotowoltaiki w przeliczeniu na 15 lat?
-
Czy ktoś ma jaką nową informację o powrocie pikniku modelarskiego w Wilczych Laskach?
-
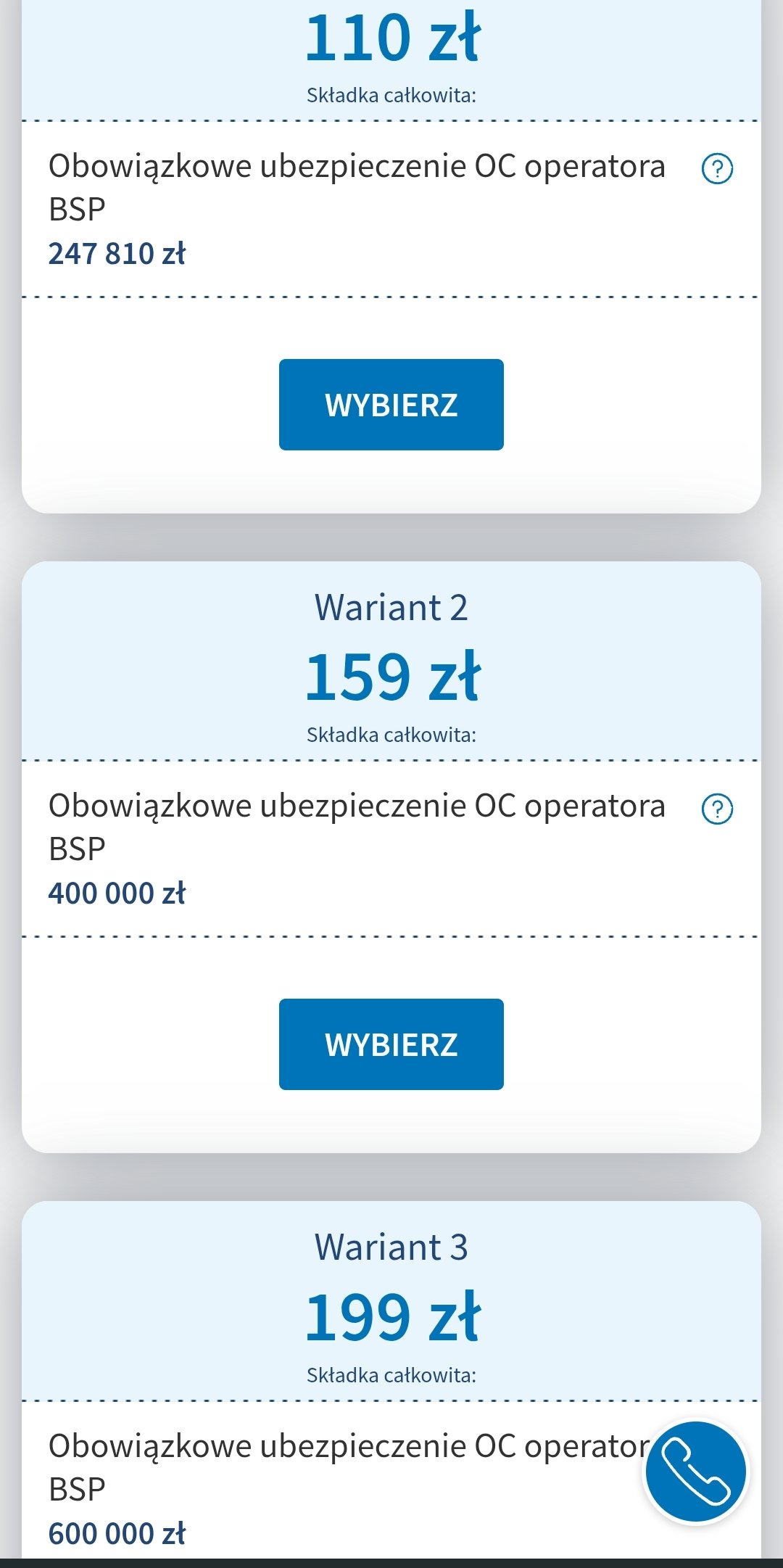
Ubezpieczenie OC staje się obowiązkowe.
maxiiii odpowiedział(a) na Swift temat w Przepisy dla modelarstwa RC
Teraz to wszyscy są droniarze. Ty też. A jeżeli ty nie jesteś droniarz tylko modelarz to znaczy, że ciebie ne obowiązuje przymusowe OC bo te jest tylko dla droniarzy. Zawsze znajdzie się jakaś czarna owca i to w każdej grupie ludzi. Tego nie da się uniknąć. Takich ludzi trzeba piętnować a nie lajkować na fejsie. To typ konfitury, samochodozy czy audytu.Gdyby nie mieli z tego kas to by tego nie robili. Tak też można. -
Ubezpieczenie OC staje się obowiązkowe.
maxiiii odpowiedział(a) na Swift temat w Przepisy dla modelarstwa RC
w moim owu nie mam ograniczenia wagowego czyli miałem do 20kg, cna była plus 40 zł bo to było ubezpieczenie domu i oc dla domowników. Ale wracając do 4 punktu ograniczającego odpowiedzialość w ustawie o OC dla droniarzy. 4) powstałych wskutek wykonywania operacji z naruszeniem przepisów prawa krajowego, wspólnotowego lub międzynarodowego dotyczącego zasady wykonywania operacji z wykorzystaniem systemu bezzałogowego statku powietrznego; wystarczy nie dać się złapać a jeszcze lepiej zrobić wszystko zgodnie z przepisami i nie ma co się bać. Po konsultacji z najnowszym wytworem technologicznym czyli SI Te bardzo mądre SI podało mi listę jakie narusznia mogą powodować utratę OC. 1. Brak uprawnień i rejestracji Brak rejestracji operatora: Lot dronem z kamerą bez umieszczenia numeru operatora na obudowie. Brak kompetencji pilota: Lot dronem powyżej 250 g bez zaliczonego szkolenia/egzaminu (A1/A3 lub A2). Przekroczenie wieku: Wykonywanie operacji przez osobę poniżej 16. roku życia bez nadzoru osoby dorosłej z uprawnieniami. 2. Naruszenie zasad przestrzeni powietrznej Brak Check-In: Lot bez zgłoszenia w aplikacji (np. DroneTower) w strefach, gdzie jest to wymagane. Wlot w strefy zakazane: Latanie nad obiektami strategicznymi, jednostkami wojskowymi lub w strefach zakazanych (P) i ograniczonych (R) bez zgody. Przekroczenie wysokości: Lot powyżej 120 metrów nad poziomem terenu (AGL). 3. Bezpieczeństwo operacyjne (Zasady lotu) Lot poza zasięgiem wzroku (BVLOS): Sterowanie dronem, którego nie widzisz gołym okiem (jeśli masz uprawnienia tylko na zasięg wzroku – VLOS). Latanie nad zgromadzeniami osób: Lot nad koncertami, plażami, protestami czy rynkami pełnymi ludzi (zabronione w kategorii otwartej). Złamanie odległości od osób: Latanie zbyt blisko osób postronnych (np. w kategorii A3 wymagane jest min. 150 m od zabudowań i ludzi). 4. Stan techniczny i masa drona Przekroczenie masy (MTOM): Lot dronem cięższym niż pozwalają na to Twoje uprawnienia lub kategoria drona. Brak klasy drona: Używanie drona bez nadanej klasy (C0-C4) w sposób niezgodny z przepisami przejściowymi. Modyfikacje: Lot dronem "samoróbką" lub zmodyfikowanym, który nie spełnia norm bezpieczeństwa UE. 5. Warunki zewnętrzne i stan pilota Lot pod wpływem: Sterowanie dronem po spożyciu alkoholu lub środków odurzających. Złe warunki atmosferyczne: Lot podczas zbyt silnego wiatru (przekroczenie limitów producenta) lub przy ograniczonej widoczności. Lot w nocy bez oświetlenia: Brak wymaganego zielonego światła błyskowego na dronie podczas lotów po zmroku. W odpowiedzialności cywilnej jest trochę inaczej niż karnej i to my jesteśmy zobowiązani do udowodnienia, że nie jesteśmy winni. -
Ubezpieczenie OC staje się obowiązkowe.
maxiiii odpowiedział(a) na Swift temat w Przepisy dla modelarstwa RC
Tak rozmawiamy o oc. Przeczytaj tytuł. Przepisy są zrobione dla systkich i nie tylko dla przeciętnego doniarza. zgadzam się. Ja z tym też nic nie zrobiłem. A ty? Tak to zrobiłem. Jak ci się nie oodoba nazwanie ciebie droniarzem napisz DIY. Będzie tak ładnie po angielsku. Dobre to były czasy. Wtedy był podział na prawdziwych modelarzy i nieprawdziwych modelarzy zwanymi droniarzami. A co do krojenia kasy przez pańswo to nie znam noej ustay czy rozporządzenia które nie zabierało by nam kasy z portfela. Jeżeli chodzi o zmianę niektórych przepsów i treści OWU to widzę tylko jedno wyjście. Znalezienie posła z parti rządzącej który jest modelarzem czy droniarzem (ieważne jak go nazwiemy) i może on coś z tym zrobi. Innych sposobów na teraz nie znam. Nie jestem negatywnie nastawiony do tego co piszesz ale same przepisy i ustawy mają trochę większy zakres niż polatanie sobie szybowcem na zboczu. Zawszeznajdziesię ktoś kto też chce zarobić i tak właśnie czynią towarzystwa ubezpieczeniowe. Zresztą przd wprowadzeniem obowiązkowego ubezpieczenia koszt takie nieobowiązkowego wynosił +40 zł. Teraz nagle wzrósł o 300%. Może wtedy olać takie ubezpieczenie i ubezpieczyć się gdzie? -
Czyszczenie modeli. To też ważny temat.
maxiiii odpowiedział(a) na kaczma2 temat w Statki , okręty, okręty podwodne , żaglowce
Może zrobic przeciąg w drugą strone to wtedy cały ten kurz wyleci na korytarz? -
Ubezpieczenie OC staje się obowiązkowe.
maxiiii odpowiedział(a) na Swift temat w Przepisy dla modelarstwa RC
Dziwne podejscie swiadczące o nie rozróżnianiu operatora i pilota. Oprucz tego nawet w pansie jest funkcja do ustawienia dron pojedyńczy lub rój. Rój moze mieć ten sam numer. Po wejsciu na swoje konto w pansie i utworzeniu swojego drona wszystko staje sie proste. -
Ubezpieczenie OC staje się obowiązkowe.
maxiiii odpowiedział(a) na Swift temat w Przepisy dla modelarstwa RC
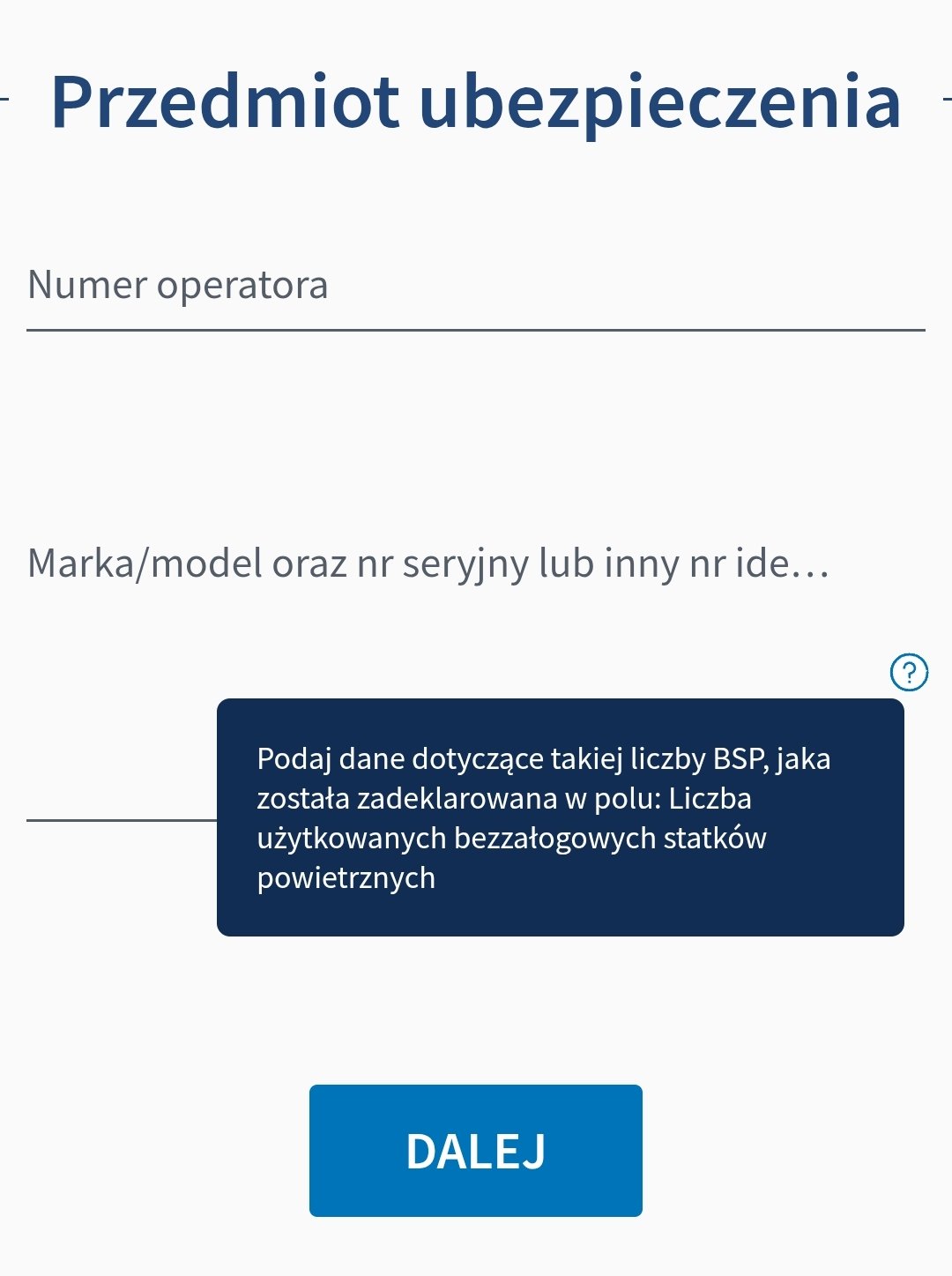
Dziwne podejście. Producent to ten który go wykonał czyli ty. I tak trudno nadać producent "Jurek", nazwę "mój wicherek" i numer "01"? -
Ubezpieczenie OC staje się obowiązkowe.
maxiiii odpowiedział(a) na Swift temat w Przepisy dla modelarstwa RC
Mi w pzu zaproponowano przed chwilą 110zł. A co do numerów seryjnych to raczej nie musi byc numer moze byc dowolna nazwa czyli JAK3, wicherek czy dronik.
-
Nie znam.
-
Połączenie z pixem będziesz miał na na sbus. Jak na ali wpiszesz pixhawk to dostaniesz linki. wszystkie są właściwie takie same różnią się ceną i promocjami. Podstawa dla ciebie została już określona. może być jeszcz jakaś telemetria ale sporo dodatkowo kosztuje jak na swoje parametry. na 2 x stm32 zrobisz doś dobry link telemetryczny. ale to wszystko zależy od twoich umiejętności w elektronice. Jeżeli jesteś zielony to niestety ale sam sobie nie poradzisz. poniżej daję przykładowy zestaw który potrzebujesz. https://pl.aliexpress.com/item/1005009104739225.html Pamiętaj to tylko przykład. nie znam sprzedawcy. wersja PRO Standard Set to podstawa nie ma telemetri. dodatkowo moższ kupić telemetrię lub zaprogramować samemu np z esp32 dronebridge. Będziesz miał pełne sterowanie z carp pilot. Aparatura będzie nepotrzebna.
-
Można zrobić tanio i można dobrze. Proponuję pixhawk1, gps z kompasem - dowolny może być nawet 6n. Dodatkowo moduł zasilania - będziesz miał wgląd ile prądu zostało ci w akumulatorach. Ewentalnie regulatory jeżeli nie masz osobnych. jak dodasz 2 x esp32 to ci nawet nie będzie potrzebne radio. wszystko zrobisz w tablecie na androidzie. Powodzenia.
-
Proszę o wytłumaczenie wielości BEC w regulatorze 3f.
maxiiii odpowiedział(a) na jacekplacek temat w Regulatory
0.18A X 4 = ? 0.8A X 4 = ? to już chyba policzysz. -
Proszę o wytłumaczenie wielości BEC w regulatorze 3f.
maxiiii odpowiedział(a) na jacekplacek temat w Regulatory
Sero standard może pobierać pod średnim obciążeniem do 1A . Wiadomo, że 4 szt. nie będą w tym samym czasie pod takim samym obciążeniem więc 4A powinno wystarczyć. I takiego szukaj .