stan_m
-
Postów
876 -
Rejestracja
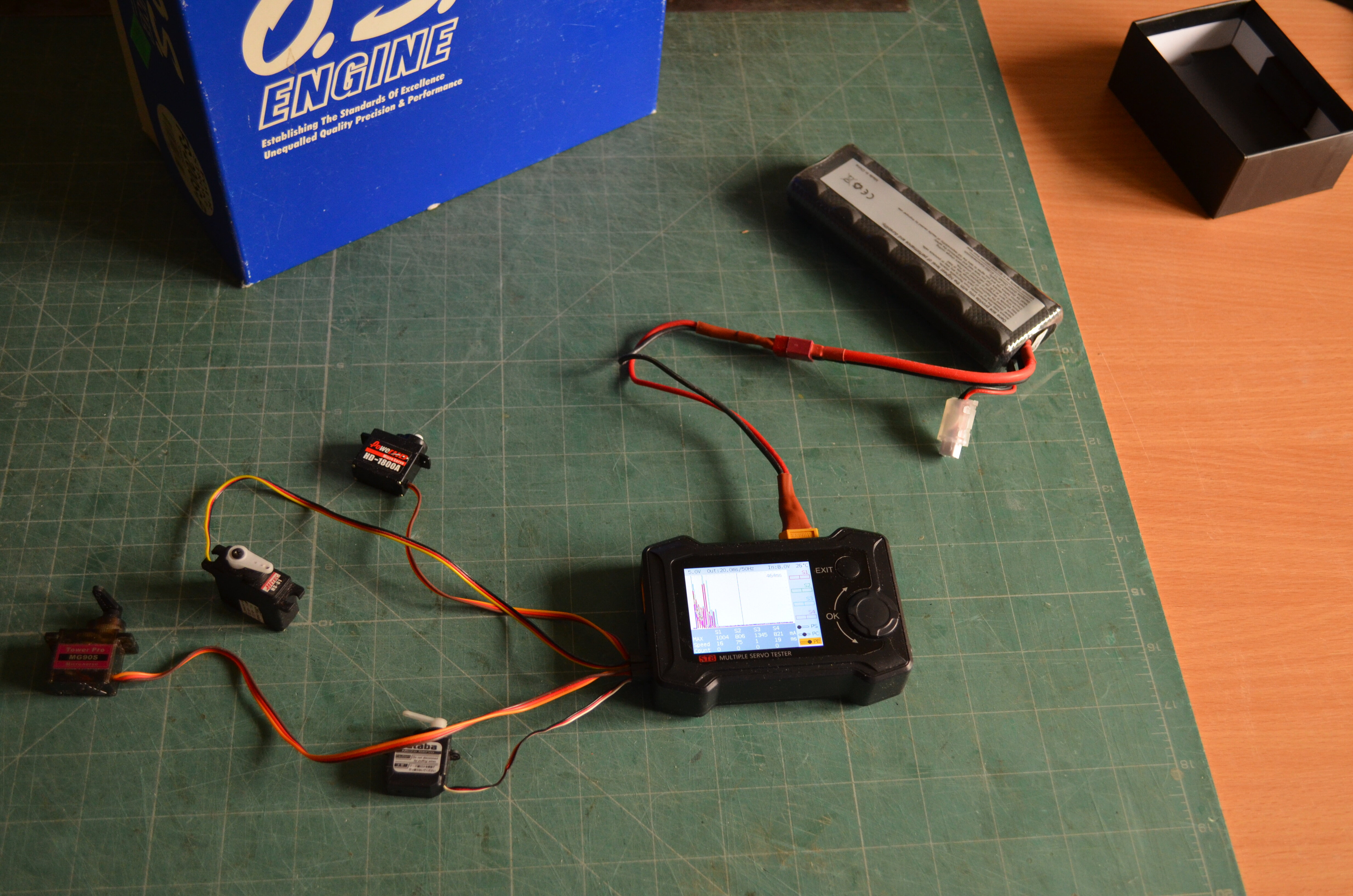
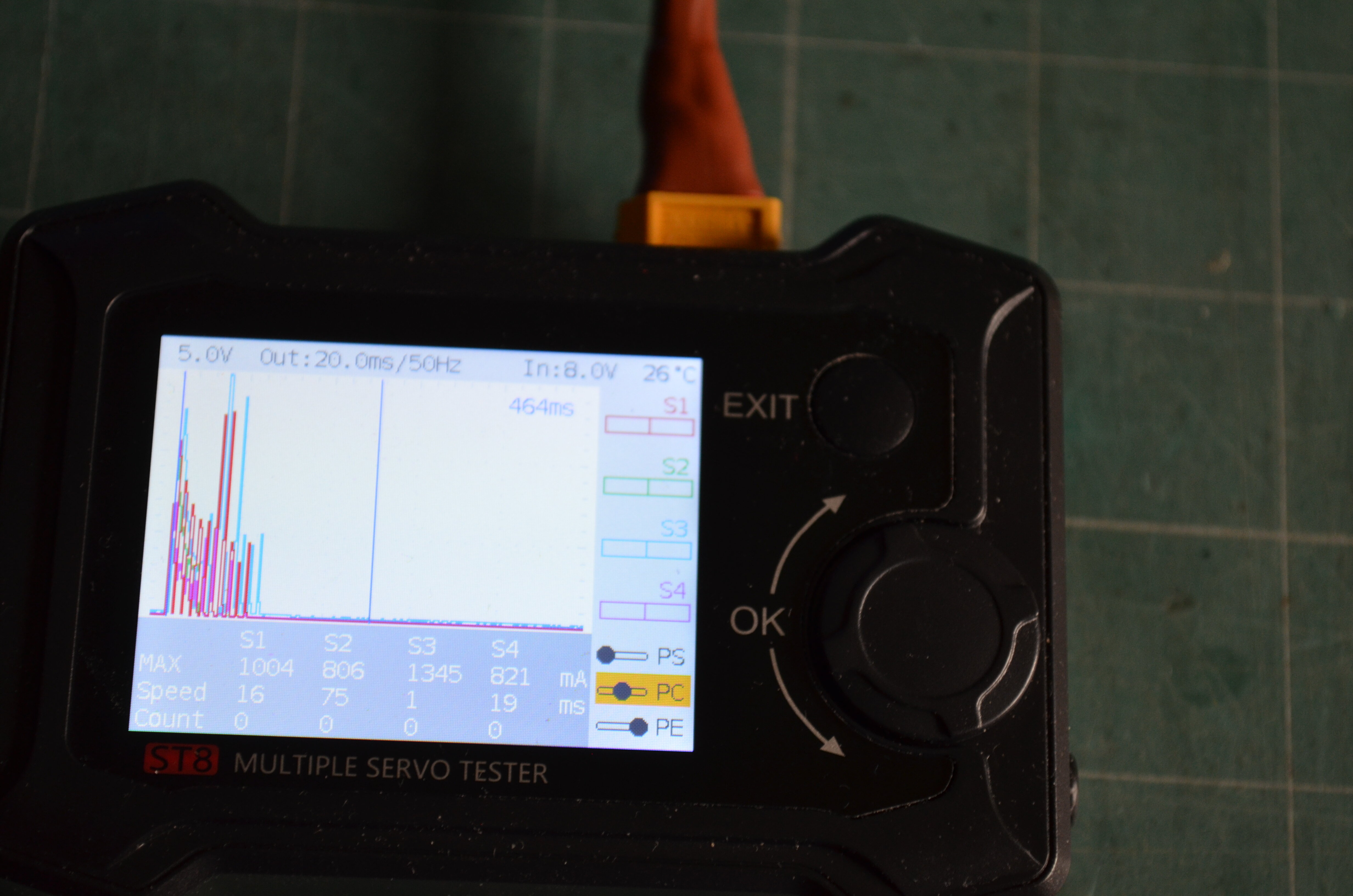
-
Ostatnia wizyta
-
Wygrane w rankingu
19
1 obserwujący

-
Prawdopodobnie pomoże zmiana w odbiornikach MODE: 1.Odbiornik FrSKY RX6R, Manual - rozdział "How to Switch HS/FS Mode". Dla serwa cyfrowego powinien być okres klatki impulsu (nie jest to szerokość impulsu - ramka) 9ms (HS) 2.Odbiornik FrSKY Archer Plus GR8, Manual - rozdział "How to Switch High PWM Speed Mode"
-
Zgoda.
-
Tak jak podał Jerzy. ToolkitRC ST8. Olbrzymie możliwości testowania, dobierania, sprawdzenia stopnia zużycia itp.
-
Koledzy, podzielę się swoimi doświadczeniami w zakresie zasilania serw: 1.Dobierając serwa, źródło i sposób zasilania w modelu RC niezbędne jest wykonanie tzw. bilansu mocy czyli rzeczywistego zapotrzebowania serw na prąd podczas lotu. Trzeba to robić maksymalnie dokładnie bo mimo to, że współczesne Li-Pol maja bardzo sztywne charakterystyki rozładowania to jednak również współczesne serwa są tak prądożerne w każdej fazie lotu , że bez szczegółowego obliczenia ich poboru mocy nie można nic założyć np. wg danych katalogowych, które nie są dokładne a często mocno nieprawdziwe. 2. Do niedawna większość serw była sterowana modulacją(szerokością) impulsu PWM o szerokości 2 milisekund(ramka 2 milisekundy, gdzie neutrum ma 1,5 milisekundy, lewo-1 milisekundy a prawo – 2 milisekundy). Ramka ma okres powtarzania 20 milisekund (jest w klatce 20 milisekundowej) co daje częstotliwość impulsu serwa 50 Hz. Ponieważ neutralne położenie tego serwa jest w okolicach 1,5 milisekundy to serwa tego typu nazywane są „serwami 1500 mikrosekund”. 3. Jednak producenci w celu zwiększenia szybkości, mocy i dokładności ustawienia zmienili kanon „50Hz- czyli długość ramki 20 milisekund ” i „serwo 1500 mikrosekund” na :np. „Futaba- długość ramki 14 milisekund i 7 milisekund oraz „serwo 750 mikrosekund” (czyli ramka impulsu ma wartość 1 milisekundy (0,5 milisekundy-w lewo, 0,75milisekundy – neutrum, 1 milisekunda-w prawo. Czyli pojawiły się serwa typu „70 Hz” i „140 Hz”. A są jeszcze serwa śmigłowcowe „333Hz” no i wojskowe… 4. Zaistniała taka reguła: duża wartość ramki impulsu sterującego i mała częstotliwość klatki – mały pobór prądu, mała (umownie) wartość ramki impulsu sterującego i duża częstotliwość klatki – duży pobór prądu. Różnice w poborze prądu są naprawdę duże i bez osobistego pomiaru niemożliwe do oszacowania. Bywa często tak, że malukie serwo „nic nie robi a dużo bierze” (praca na biegu jałowym). Dlatego bardzo łatwo nie doszacować zapotrzebowania na moc i błędnie ustalić wydajność prądową np. BEC. 5. W związku z powyższym należy wykonać pomiary poboru prądu serwa oraz jego prędkości. Pobór prądu jest mierzony w miliamperach zaś prędkość w milisekundach (tj. ile milisekund zajmie przejście ramienia serwa z położenia neutralnego na kąt 60 stopni). Zrobiłem pomiary na testerze ST8 dla następujących serw: S-1: Futaba S3108, S-2 : MG-90S, S-3 : Hitec HS-81, S-4 : HD-1800A. Pomiar polegał na zmierzeniu poboru prądu w położeniu neutralnym, lewym i prawym oraz na zmierzeniu prędkości serwa przy obrocie dźwigni w lewo i prawo o kąt 60 stopni. Pobory prądów: lewo-neutrum-prawo (w miliamperach) Futaba S3108: 1004-1004-1004 MG-90S : 799-806-806 Hitec HS-81: 1328-1345-1345 HD-1800A : 821-821-821 Prędkości obrotu na 60 stopni: lewo-neutrum-prawo (w milisekundach) Futaba S3108: 16-16-16 MG-90S : 76-75-75 Hitec HS-81: 1-1-1 HD-1800A : 39-19-19 Wnioski: Serwo Hitec HS-81 jest uszkodzone (ma „nienaturalnie” wysoki pobór prądu i nieokreśloną prędkość, inny pomiar to potwierdził). Pozostałe serwa biorą bardzo dużo prądu i to na biegu jałowym co oznacza , że sześć nicnierobiących serw Futaba bierze 6A prądu! A gdy się wychylają to o wiele więcej. Ja mam hamownię serw, gdzie obciążam je siłami równymi obliczonym wartościom sił aerodynamicznych sterów/lotek a więc pobór prądu jest naprawdę duży. Tak więc zapotrzebowanie na moc jest ogólnie duże co wymaga bardzo starannego doboru zasilania no i oddzielnej magistrali zasilania serw o ile miejsce w modelu i ciężar na to pozwalają.

-
Spróbuję zgadnąć przyczynę: 1. Najprostszy tzw. tester serw nadaje się tylko do "testowania" pojedynczego serwa na stole, poza modelem. Z tego "testowania" wynika tylko tyle, że serwo się wychyla lub nie wychyla oraz czy pracuje ono głośno czy cicho. Innych parametrów jak np. superważny parametr - szerokość impulsu sterującego serwem, tym testerem nie zmierzymy. Rozbudowany tester, którym można już testować serwa zamontowane w modelu razem z siecią elektryczną wygląda tak: G.T.POWER TESTER SERW Professional (modelemax.pl) Tester ten naprawdę porządnie testuje serwa i dostarcza wiele informacji kluczowych do weryfikacji np. z danymi katalogowymi serw. 2. Pierwszeństwo ma zawsze praca serw w systemie pokładowym czyli z dedykowanym odbiornikiem, innymi serwami i zasilaniem więc nie tester decyduje ostatecznie o niezawodności tylko pokładowy system RC. 3. Istotnym parametrem serwa jest tzw. szerokość impulsu sterującego, która niestety nie należy do tzw. wartości powtarzalnych co oznacza, że takie same serwa mają różne szerokości impulsu (oczywiście nie o rząd wielkości ale o mikrosekundy). Szerokość impulsu sterującego decyduje o szybkości pracy serwa. Z tego powodu odbiorniki Futaby I FrSKY podczas blindowania wymagają "press receiver's F/S button" (Fast/Slow). Być może podczas "testowania" tym prostym testerem "szerokość impulsu" dla jednego serwa była rozpoznawalna a dla drugiego już nie bo maja one oddalone od siebie wartości impulsu sterującego, którego impuls testera "nie kryje". Oczywiście to są moje spekulacje a problem może wyjaśnić wspomniany wyżej profesjonalny tester serw.
-
Piper Cub 40% 3D
stan_m odpowiedział(a) na koniorc temat w Nasze modele (prezentacje i relacje z budowy)
Korzystając z prostego wzoru Pana Inżyniera Sołtyka wyliczyłem dla Twojego modelu moment bezwładności względem osi podłużnej (bardzo ważny parametr określający cechy pilotażowe samolotu nie tyle "ilościowo" co "jakościowo-porównawczo"). Dla Masy modelu w locie=18,8 kg i Rozpiętości = 4,4m Moment Bezwładności Względem Osi Podłużnej wynosi 22,74 kgm2 Dla prawdziwej Extry-330 (masa 820 kg, rozpiętość 8,00m) Moment Bezwładności Względem Osi Podłużnej wynosi 3280 kgm2 . A więc przy blisko dwukrotnie mniejszej rozpiętości i ponad 40 krotnie lżejszym modelu Piper'a jego Moment Bezwładności Względem Osi Podłużnej jest mniejszy od Extry prawie 144 razy. Niska wartość momentu bezwładności względem osi podłużnej pozwala nam w łatwy sposób (szybko i przy małych wychyleniach lotek) zmieniać jego prędkość w ruchu obrotowym wokół tej osi co pokazuje dużą zwrotność modelu w tym kanale sterowania. Jeżeli zmniejszysz masę modelu o 1 kg to w porównaniu do Extry Moment Bezwładności Względem Osi Podłużnej Piper'a będzie mniejszy od Extry 158 razy. "Jakościowo" różnicy prawie nie ma ale w praktyce wykażą loty czyli mocno subiektywne wrażenia pilota. Piękny model zrobiłeś. -
Moje trzy grosze do dyskusji: 1.Tarcze przyrządów pokładowych o średnicy 80 mm. Rodowód niemiecki – Askania. Powielony przez Gerlacha, i ZSRS (cała produkcja sowiecka nawet do dzisiaj).Ciekawostka-Askania wprowadziła warstwę przeciwpotną na szkła do tych przyrządów (cienko położona żelatyna spożywcza, stosowana do dzisiaj jednak nie wszędzie bo w tzw. ciepłych krajach rosną na niej robaczki różne) Amerykanie i Brytyjczycy mają swoje rozmiary calowe a średnica 80mm pokazuje od razu rodowód przyrządu. Różnica wymiarowa jest zauważalna wzrokowo. 2.Nazwy przyrządów pokładowych stosowane przez Kajetana. a) „kontroler lotu” – prawidłowa nazwa „zakrętomierz i chyłomierz poprzeczny” tzw. przyrząd zespolony. Chyłomierz poprzeczny to kulka w rurce szklanej wypełnionej cieczą tłumiącą. Zakrętomierz to żyroskop o dwóch stopniach swobody napędzany powietrzem (dysza Venturi’ego). Kontroler lotu to już przyrząd pilotażowy bardziej zaawansowany (np. firmy Badin, Sperry) bo składający się z prędkościomierza barometrycznego, zakrętomierza żyroskopowego i chyłomierza poprzecznego (także przyrząd zespolony). Kolejną ewolucją tego przyrządu był już czystej krwi sztuczny horyzont z żyroskopem o trzech stopniach swobody, którego wirnik napędzany był niezależnym duktem sprężonego powietrza z butli lub sprężarki. b)”wskaźnik wznoszenia” – prawidłowa nazwa „wariometr” c)”kompas” – prawidłowa nazwa „busola magnetyczna”
-
Janku, było wiele rozwiązań tzw. oszczędzaczy paliwa pF 126p. Turbinka Kowalskiego miała obrotowy wirnik z trzema łopatami obracający się swobodnie od przepływu powietrza (czyli bez napędu), była tez siateczka, żeby w razie draki szczątki śmigiełka nie wpadły do silnika . W zamiarze konstruktora miało to dać dodatkowe zawirowania powietrza w gaźniku i polepszyć ilościowo ilość rozpylonego powietrza. Pamiętam jak w latach 80-tych płk prof. Stefan Szczeciński z Katedry Silników Lotniczych WAT pokazywał nam, że niestety ta turbinka nie pracuje tak jak twierdzi konstruktor tzn. nie wytwarza wirów. Profesor był wówczas pozasłużbowo wielkimi fanem oszczędzaczy paliwa w fiaciku 126p i pokazał nam, że efekt wirów w gaźniku można uzyskać poprzez specjalnie uformowanie dyszy, które było podwyższeniem gaźnika wraz z prowadnicami powietrza (bez elementów ruchomych). I wykonał taki prototyp a my jeździliśmy alejkami WAT fiacikiem w ramach testów, których wyniki były imponujące. Profesor Szczeciński miał w tamtych latach swój program w TV, gdzie wspólnie ze swoim synem mocno polemizowali z Turbinką Kowalskiego pokazując swoje wynalazki, które cieszyły się dużym zainteresowaniem widzów bo malucha miał wtedy prawie każdy.
-
Rafał ma rację. 1. Wiązki przewodów elektrycznych w dużych samolotach z porządną i prawidłowo wykonaną instalacją elektryczną są zawsze a oplocie lub w koszulce ze specjalnie podgumowanej tkaniny (np. rosyjska AHKR) albo w jednym i drugim. Jest to ochrona nie tylko przed przetarciem przewodów ale również przed wilgocią, która występuje zawsze, w modelach również. Oplot lub tkanina pokazuje też podczas przeglądów prawidłowość upięcia wiązek przy elementach ruchomych samolotu :stery, hamulce, drzwi bombowe itp. Bo to one przecierają się najpierw a nie przewody elektryczne w przypadku niewłaściwego upięcia wiązki. 2. Wiązki przewodów elektrycznych powinny być zawsze upięte do konstrukcji samolotu. Jest to podstawowa zasada montażu pokładowej sieci elektrycznej. Żaden, nawet pojedynczy przewód elektryczny nie może "dyndać" swobodnie bo jest to przesłanka do wypadku lotniczego lub pożaru a przykładów na to jest mnóstwo. Dzisiejsze mocno rozbudowane wyposażenie modeli samolotów RC pod względem instalacji elektrycznej powinno być wzorowane na prawdziwych samolotach.
-
Ach te Babie Doły...Pamiętam jak w latach osiemdziesiątych MiGi-21R z Sochaczewa lądowały tam na tankowanie po czym startowały do lotu nad Bornholm, aby cyknąć trochę fotek. Moi Koledzy piloci mówili wtedy, że tak słuchali pracy silnika, że samolot sam odwracał się dziobem w stronę lądu. A tu proszę...bez silnika nad morzem, tam i z powrotem. Wielki Szacunek i Podziw.
-
Święte Słowa Kolego Andrzeju! Ja ostatnio mam ciągłe prośby kolegów z Dublina o wskazanie, gdzie w Polsce dobrze karmią i poją bo w Irlandii jest moda na "Weekend w Polsce", tak, że w piątek trudno kupić bilet do Modlina. A że służbowo podróżuję po polskich portach lotniczych więc spraktykowaną wiedzę mam i oni uważają mnie już za eksperta (hihihi). W Twoim mieście ręczyłem za Spiż i Orle Gniazdo. Tak już rozprowadzałem Brytyjczyków, Niemców, Holendrów i jeszcze paru. Wszyscy bez wyjątku byli zachwyceni polskim jedzeniem no i piwem a ci mniej dbający o zdrowie - polską wódeczką. Ceny jedzenia i picia w Polsce nie mają konkurencji w Europie. Oby to trwało jak najdłużej.
-
Moje trzy grosze w dyskusji na temat lotek i steru kierunku w szybowcach typu RES: 1. Zrobiłem kilkanaście modeli szybowców/motoszybowców typu RES w układzie podwójnego wzniosu i tylko jeden model motoszybowca RES z klasycznymi lotkami i małym wzniosem (co jest oczywiste). Niestety własności lotne RES-a z lotkami mnie osobiście zniechęcają do latania tym modelem zaś RES-y ze sterem kierunku (kilka wariantów wzniosu połata) – tak jak pisał Patryk – wręcz zapraszają do pilotażu i nie męczą nawet po ponad godzinnym locie. 2. Rozważanie sterowania modelem w kanale przechylenia (lotki) wymaga przypomnienia, że oprócz układu aerodynamicznego płata dużą rolę odgrywa moment bezwładności (jego wartość) modelu w kanale przechylenia realizowany wyłącznie metodą konstrukcyjną (rozpiętość, masa i rozkład mas). Wysoka wartość momentu bezwładności modelu powoduje, że ciężko jest zmienić ruch obrotowy tego modelu wokół osi podłużnej (zwiększyć lub zmniejszyć prędkość obrotu wokół tej osi). Niska wartość momentu bezwładności względem osi podłużnej pozwoli nam w łatwy sposób zmieniać jego prędkość w ruchu obrotowym wokół tej osi. Zmiany te realizują lotki lub płat z odpowiednio dobranym wzniosem. Wartości momentu bezwładności w kanale przechylenia (ja obliczam je wg prostego wzoru Pana Inżyniera Sołtyka) służą dobrze do oceny jakościowej samolotu pod względem sterowania. Przykład : moment bezwładności samolotu PZL23 KARAŚ wynosi 35186,56 kgm2 zaś moment bezwładności znanego akrobata EXTRA-330 wynosi 3280 kgm2. Od razu widać, który samolot dobrze, łatwo i szybko kręci beczki. Powyższy wywód dotyczy też szybowców RES. 3.W przypadku modeli latających sterowanych wznios płatów oprócz funkcji ustateczniającej pełni ważną rolę w sterowaniu modelem a mianowicie zastępuje w pewnym stopniu lotki. Gdy korzystamy tylko ze steru kierunku to po jego wychyleniu uzyskujemy odchylenie osi kadłuba od kierunku opływu powietrza. Razem z kadłubem przesuwają się też płaty (jeden do przodu, drugi do tyłu). Gdy model nie posiada wzniosu opływ płatów nie jest różny dla każdego z nich. Jeżeli jednak płaty posiadają wznios to np. przy odchyleniu osi kadłuba w prawo lewe skrzydło jest bardziej z przodu a prawe z tyłu ale są tego pewne skutki. Daje to wyraźne zróżnicowanie kątów natarcia pomiędzy płatem prawym i lewym i to na całych ich powierzchniach. Płat „przedni” pracuje na większym kącie natarcia niż płat „tylny”. Większy kąt natarcia oznacza większy współczynnik siły nośnej czyli większą wartość siły nośnej. Większa wartość siły nośnej na jednym z płatów powoduje moment przechylenia analogiczny do wywołanego przez lotki. Aby wykonać zakręt w prawo modelem ze wzniosem wystarczy wejść w prawy ślizg i skośny opływ płata spowodowany wychyleniem tylko steru kierunku. Dlatego też konstruktorzy RES-ów za najważniejszy parametr przyjęty do projektu modelu uważają odpowiednio dobrany całkowity wznios płata i często o niego pytają.
-
A jak będą podróżować Koledzy Modelarze przez Polskę B do Augustowa to polecam spróbować Browar Waszczukowe. Każdy znajdzie coś dla siebie a jak nie znajdzie to Duch Puszczy go odnajdzie i dodawszy procentów w jakości napoju utwierdzi.
-
Takie sceny z polskich filmów są jak muzyka...Facebook
-
1. Andrzeju, piwa dolnośląskie a szczególnie te z Lwówka nie mają sobie równych, oczywiście wg mojego gustu a ja próbowałem "zupy chmielowej" w wielu miejscach na świecie. A polskie piwa rzemieślnicze to już ekstraklasa niestety za granicą prawie nie znana. 2. Myjki ultradźwiękowe maja bardzo intensywne, ciągłe i skuteczne zastosowanie w lotnictwie. O ile wykorzystanie ultradźwięków do penetracji brudu jest wiedzą powszechną o tyle skład chemiczny medium jest z reguły zablokowany tajemnicą (do czasu oczywiście). W latach 90 tych minionego wieku w pewnym zakładzie lotniczym na Węgrzech pokazywano mi pracującą myjkę ultradźwiękową z medium, w której był zanurzony włączony i odbierający telewizor. Taka ciekawostka.