ask
-
Postów
10 -
Rejestracja
-
Ostatnia wizyta




-
Kolejne, proszę uważać https://www.olx.pl/oferty/user/2MwRz9/
-
Witam, kolejne dwa ogłoszenia Mateusza https://www.olx.pl/d/oferta/silnik-modelarski-cox-0-49-rc-CID767-ID17iGKf.html https://www.olx.pl/d/oferta/motoszybowiec-eazy-glider-pro-gotowy-do-lotu-CID767-ID17jxYy.html Jako Łukasz Zakrzewo-Zalesie.
-
Jak obnizyc napiecie dla mechanizmow podwozia z 6V do 5-5.5V?
ask odpowiedział(a) na adam.trzaskowski temat w Serwomechanizmy
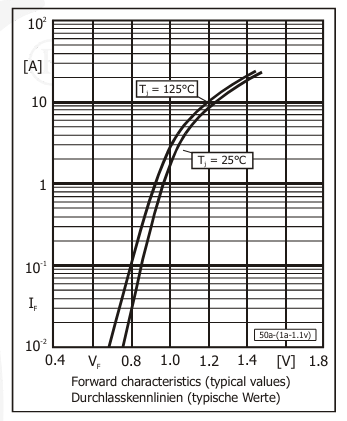
0.4V spadku daje dioda Schotky'ego, zwykła krzemowa w przedziale 0.7 - 1.2V ale uwaga w zależności od prądu i temperatury. Dla przytoczonej diody 1N4007 wygląda to następująco: przy 1A w temp. pokojowej spadek będzie wynosił około 0.9V.
-
Jak już latałeś to symulator zbędny tym bardziej pod motoszybowiec. Głównym zadaniem symulatora jest nabycie pamięci mięśniowej żebyś się nie zastawiał nad kolejnym ruchem drążka tylko robił to automatycznie. Przy lataniu wolnym piankowym szybowcem można iść tu na żywioł, ewentualnie zmianę kierunków przy locie na siebie przećwiczysz i nic więcej. Co innego drony wyścigowe czy latanie 3d wtedy symulator to 'must have' jak ktoś poważnie podchodzi do treningu.
-
Odkopię trochę temat... Użytkuje ktoś Raytronic C50 wygląda mi to na klon ToolkiRC M6D?
-
Problemy z serwa TowerPro MG90S (WAVESHARE WS-MG90S) na przedłużaczu
ask odpowiedział(a) na kuba r. temat w Serwomechanizmy
Trochę to dziwne że skręcanie kabla pomaga, brak tu sygnałów różnicowych chyba że zasilanie oscyluje w takt sygnału ppm. Sent from my SM-A405FN using Tapatalk -
Zmieniłem na akrobata i to samo, wszystko lata do gleby pod kątem 45st. Znalazłem jeden wątek na rcgroups.com z tym samym problemem: https://www.rcgroups.com/forums/showthread.php?1532414-Trim-in-Phoenix Niestety bez rozwiązania... Mam wersję 5.0.b, mógłby ktoś udostępnić instalkę 5.5, linki w tym wątku już nie działają. EDIT Linki na google drive zadziałały, zainstalowałem 5.5 i jest lepiej na 50% tzn. da się latać ja ustawię trim wysokości w górę na taką wartość w wersji 5.0 musiałem na 100%. Aktualnie ustawiłem subtrim na wysokość na 50% i tak latam.
-
Witam! Mam pytanie odnośnie działania symulatora Phoenix RC, mam z nim mały problem i nie wiem jak go rozwiązać. Otóż posiadam ten chiński adapter All in One USB z przełącznikiem SimX oraz aparaturę Spektrum DX6. Ustawiłem pusty model Heli, wszystkie ustawienia wyzerowane, skalibrowałem zgodnie z instrukcją, odpalam lot elektroszybowcem i tu niemiła niespodzianka, bo model ciągnie do dołu na pełnym gazie, cały czas muszę kontrować dość mocno wysokością. Lot szybowcowy to masakra, model spada jak kamień po ustawieniu drązków w neutrum. Ogólnie to da się jako tako latać tylko na silniku i to na 100%. Wypróbowałem również jakiegoś górnopłata, to samo, bez przerwy muszę trzymać wysokość lekko na siebie by lecieć poziomo o puszczeniu drążka w neutrum nie ma mowy, bo model mocno pikuje w dół. Strasznie to męczące i słabo oddaje rzeczywiste zachowanie modeli. Pytanie co może być nie tak, może trzeba coś pozmieniać w ustawieniach modeli? Kalibrację przeprowadziłem kilkukrotnie, wszystkie wskaźniki na ekranie pokazują wychylenia drążków prawidłowo, aparatura sprawna latam nią w realu monitor też nie pokazuje nic dziwnego. Dodatkowo info grafika z aparaturą na ekranie symulatora też prawidłowo pokazuje wychylenia. Próbowałem również wytrymować, ale nic to nie daje. Z góry dzięki za wszelkie wskazówki!
-
Proszę usunięty, 'empty' może być?
-
A więc wracam do modelarstwa po 15 latach przerwy Wcześniej budowałem i latałem modelami klas F1A, F2A, stratowałem również w zawodach, RC od niedawna bardzo mnie wciągnęło. Interesuję się elektroniką i programowaniem, właściwie to wykonuje prace w tych obszarach zawodowo. Bardzo dziękuje za przyjęcie mnie do forum, ilość wiedzy jaką można znaleźć na jego stronach jest dla mnie nieocenioną pomocą. Pozdrawiam!