Witajcie,
Wiele osob pyta mnie o zabawki, ktore uzywam w DLG zrobione na arduino. Nie jestem programista, ani elektronikiem, wiec jest wiele bledow. Najważniejsze jednak, że dziala
Jest wiele watkow opisujacych jak zaczac zabawe z arduino (instalujemy srodowisko arduino, sterowniki, dodawanie bibliotek...), dlatego ta czesc pomine.
Jako pirwsze opisze prosty i bardzo tani logger wysokosci.
Lista zakupow z Chin:
1) plytka arduino pro mini (1,25$ )
https://www.arduino.cc/en/Main/ArduinoBoardProMini
1a) dodatkowo do zaprogramowania konieczny bedzie programator na ukladzie FTDI232 (1,20$) - doslownie nie jest to programator a emulator portu RS232 na USB, z wyjsciem TTL.
2)plyteczka z portem karty microSD, w wersji zasilanej oraz sterowanej napieciem 5V - (ok 0,50$)
https://s15.postimg.org/kfxyhv23f/microsd_breakout_board.jpg
3) czujnik cisnienia BMP180 (np shield GY-68) wazne aby byl sterowany poziomem 5v - (2,50$)
4) kabelek od serwomechanizmu (z szuflady 0$).
Ceny z aliekspress przy opcji FREE SHIPPING.
Podsumowując 4,25$ bez programatora (po dzisiejszym kursie to nie cale 19zl).
No i zaczynamy. Oczywiscie nie lutujemy goldpinow, tylko cienkimi przewodami laczymy plytki na pajaka i skladamy kanapeczke.
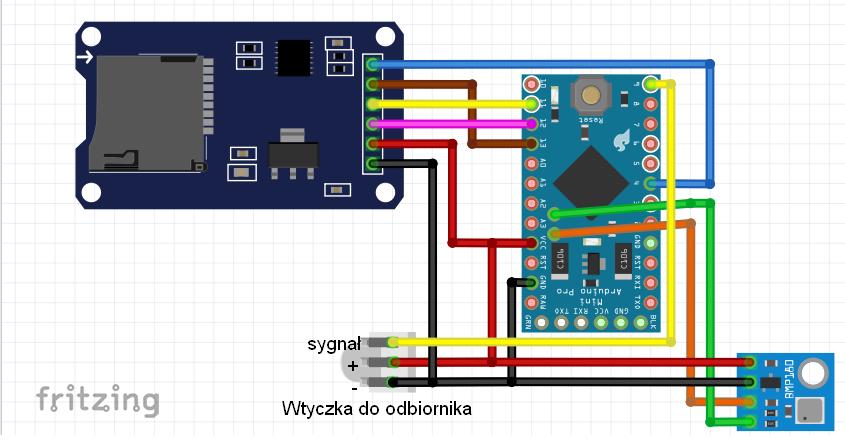
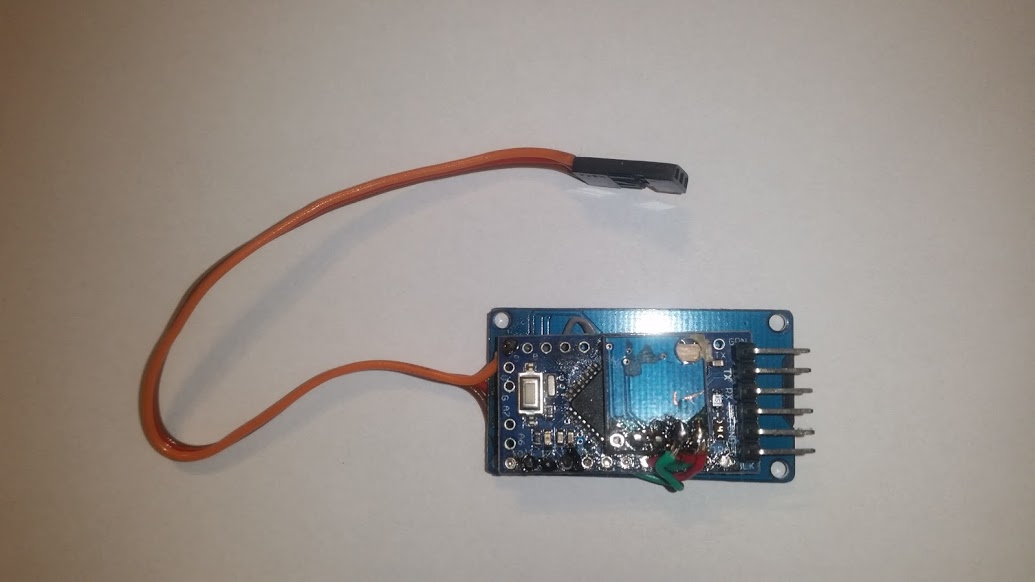
Oto schemat:
a oto moj "pajaczek": Wymiary 40x20x10mm, waga 9g.
No i zostaje wgranie programu. Zaprezentowany przeze mnie kod jest troszke przemodelowanym zlepkiem przykladow arduino (pomiar wysokosci i zapis na SD), zaprezentowany kiedys tu:
http://jadiema.blogspot.com/2014/09/micro-rocket-data-logger.html
W moim kodzie dodalem filtr dolnoprzepustowy, oraz logowanie poziomu PWM na kanale odbiornika w ktorym bedzie wpiety logger.
/*
SD card datalogger
This example shows how to log data from three analog sensors
to an SD card using the SD library.
The circuit:
* analog sensors on analog ins 0, 1, and 2
* SD card attached to SPI bus as follows:
** MOSI - pin 11
** MISO - pin 12
** CLK - pin 13
** CS - pin 4
Pins SDA & SCL
BMP085 wiring
** SDA - A4
** SCL - A5
** VCC - 5V
** GND - GND
Pin to receiver channel
** pin 9
*/
#include <Wire.h>
#include <SD.h>
#define PWMpin 9
#define DEBUG
//#define DEBUG_BMP085
int tempomesure = 500; //temporisation de la boucle
unsigned long t0=0;
unsigned long prevMillis=0;
//BMP085
#define BMP085_ADDRESS 0x77 // I2C address of BMP085, idem BMP1080
const unsigned char OSS = 0; // Oversampling Setting
// Calibration values
int ac1;
int ac2;
int ac3;
unsigned int ac4;
unsigned int ac5;
unsigned int ac6;
int b1;
int b2;
int mb;
int mc;
int md;
// b5 is calculated in bmp085GetTemperature(...), this variable is also used in bmp085GetPressure(...)
// so ...Temperature(...) must be called before ...Pressure(...).
long b5;
short temperature;
long pressure;
// Use these for altitude conversions
const float p0 = 101325; // Pressure at sea level (Pa)
float altitude;
//LOW PASS FILTER
float LowPassAltitude;
//Reveiver channel
int PWMval =0;
//SD CARD
const int chipSelect = 4;
long fileNum = 0; // maximum 99999
String fileName;
char name[13];
File dataFile;
void incFileNum() { // generate next file name:
String s = "dat" + String(++fileNum) + ".txt";
s.toCharArray(name,13);
}
void save(String s) {
dataFile = SD.open(name, FILE_WRITE);
if (dataFile) {
dataFile.println(s);
dataFile.close();
Serial.println(s);
}
else Serial.println("error opening " + String(name));
}
void setup()
{
pinMode(chipSelect, OUTPUT);
// Open serial communications and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
}
Serial.print("Initializing SD card...");
// make sure that the default chip select pin is set to
// output, even if you don't use it:
// see if the card is present and can be initialized:
if (!SD.begin(chipSelect)) {
Serial.println("Card failed, or not present");
// don't do anything more:
return;
}
Serial.println("card initialized.");
//Efface le fichier initial
// SD.remove("DATA.txt");
//GESTION DES NOMS DES FICHIERS
//--------------------------------------------------
incFileNum(); // set it to datxxxx.txt
while (SD.exists(name)) incFileNum();
#ifdef DEBUG
Serial.println("new file name: " + String(name));
#endif
//--------------------------------------------------
save("t(ms),Altitude(m)*100,LowPassAltitude(m)*100,Pression(Pa),Temperature(C)*10,PWM");
//CAPTEUR bmp085
Wire.begin();
bmp085Calibration();
//initialisation du temps:
unsigned long prevMillis = millis();
pinMode(PWMpin,INPUT); // reveiver channel PWM
//first measure
temperature = bmp085GetTemperature(bmp085ReadUT());
pressure = bmp085GetPressure(bmp085ReadUP());
altitude = (float)44330 * (1 - pow(((float) pressure/p0), 0.190295));
LowPassAltitude=altitude;
}
void loop()
{
if ((millis() - prevMillis) > tempomesure) {
///////////////////////////////////////////////////////////////
PWMval = pulseIn(9,HIGH);
// PWMval=map(PWMval, 0, 1028, 0, 255);
// Capteur pression et temperature
temperature = bmp085GetTemperature(bmp085ReadUT());
pressure = bmp085GetPressure(bmp085ReadUP());
altitude = (float)44330 * (1 - pow(((float) pressure/p0), 0.190295));
// Low pass filter
LowPassAltitude=LowPassAltitude+(altitude - LowPassAltitude)*0.1;
#ifdef DEBUG_BMP085
Serial.print("Temperature: ");
Serial.print(temperature, DEC);
Serial.println(" *0.1 deg C");
Serial.print("Pressure: ");
Serial.print(pressure, DEC);
Serial.println(" Pa");
Serial.print("Altitude: ");
Serial.print(altitude, 2);
Serial.println(" m");
Serial.println();
Serial.print("Low_Pass_Altitude: ");
Serial.print(LowPassAltitude, 2);
Serial.println(" m");
Serial.println();
Serial.print("PWM ");
Serial.print(PWMval, 2);
Serial.println();
#endif
//delay(tempomesure);
///////////////////////////////////////////////////////////////
// make a string for assembling the data to log:
String dataString = "";
//OLD
//t0 = t0 + (millis() - prevMillis);
//NEW
t0 = millis();
/*
#ifdef DEBUG
Serial.print("millis():");
Serial.print(millis());
Serial.print(",");
Serial.print("t0:");
Serial.print(t0);
Serial.print(",");
#endif
*/
unsigned int alti = altitude*100;
unsigned long pressu = pressure;
unsigned int tempe = temperature;
unsigned int LPalti = LowPassAltitude*100;
unsigned int PWM = PWMval;
dataString = String(t0) + "," + String(alti) + "," + String(LPalti) + "," + String(pressu) + "," + String(tempe)+ "," + String(PWM);
// open the file. note that only one file can be open at a time,
// so you have to close this one before opening another.
//File dataFile = SD.open("DATA.txt", FILE_WRITE);
File dataFile = SD.open(name, FILE_WRITE);
// if the file is available, write to it:
if (dataFile) {
dataFile.println(dataString);
dataFile.close();
#ifdef DEBUG
// print to the serial port too:
Serial.println(dataString);
#endif
}
// if the file isn't open, pop up an error:
else {
Serial.println("error opening datalog.txt");
}//fin du if dataFile
prevMillis = millis();
}
}// fin de loop
//---------------------------------------------------------------------------------------------------------------
//---------------------------------------------------------------------------------------------------------------
// Stores all of the bmp085's calibration values into global variables
// Calibration values are required to calculate temp and pressure
// This function should be called at the beginning of the program
void bmp085Calibration()
{
ac1 = bmp085ReadInt(0xAA);
ac2 = bmp085ReadInt(0xAC);
ac3 = bmp085ReadInt(0xAE);
ac4 = bmp085ReadInt(0xB0);
ac5 = bmp085ReadInt(0xB2);
ac6 = bmp085ReadInt(0xB4);
b1 = bmp085ReadInt(0xB6);
b2 = bmp085ReadInt(0xB8);
mb = bmp085ReadInt(0xBA);
mc = bmp085ReadInt(0xBC);
md = bmp085ReadInt(0xBE);
}
// Calculate temperature given ut.
// Value returned will be in units of 0.1 deg C
short bmp085GetTemperature(unsigned int ut)
{
long x1, x2;
x1 = (((long)ut - (long)ac6)*(long)ac5) >> 15;
x2 = ((long)mc << 11)/(x1 + md);
b5 = x1 + x2;
return ((b5 + 8)>>4);
}
// Calculate pressure given up
// calibration values must be known
// b5 is also required so bmp085GetTemperature(...) must be called first.
// Value returned will be pressure in units of Pa.
long bmp085GetPressure(unsigned long up)
{
long x1, x2, x3, b3, b6, p;
unsigned long b4, b7;
b6 = b5 - 4000;
// Calculate B3
x1 = (b2 * (b6 * b6)>>12)>>11;
x2 = (ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3)<<OSS) + 2)>>2;
// Calculate B4
x1 = (ac3 * b6)>>13;
x2 = (b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>OSS));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4)<<1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
p += (x1 + x2 + 3791)>>4;
return p;
}
// Read 1 byte from the BMP085 at 'address'
char bmp085Read(unsigned char address)
{
unsigned char data;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 1);
while(!Wire.available())
;
return Wire.read();
}
// Read 2 bytes from the BMP085
// First byte will be from 'address'
// Second byte will be from 'address'+1
int bmp085ReadInt(unsigned char address)
{
unsigned char msb, lsb;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 2);
while(Wire.available()<2)
;
msb = Wire.read();
lsb = Wire.read();
return (int) msb<<8 | lsb;
}
// Read the uncompensated temperature value
unsigned int bmp085ReadUT()
{
unsigned int ut;
// Write 0x2E into Register 0xF4
// This requests a temperature reading
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x2E);
Wire.endTransmission();
// Wait at least 4.5ms
delay(5);
// Read two bytes from registers 0xF6 and 0xF7
ut = bmp085ReadInt(0xF6);
return ut;
}
// Read the uncompensated pressure value
unsigned long bmp085ReadUP()
{
unsigned char msb, lsb, xlsb;
unsigned long up = 0;
// Write 0x34+(OSS<<6) into register 0xF4
// Request a pressure reading w/ oversampling setting
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x34 + (OSS<<6));
Wire.endTransmission();
// Wait for conversion, delay time dependent on OSS
delay(2 + (3<<OSS));
// Read register 0xF6 (MSB), 0xF7 (LSB), and 0xF8 (XLSB)
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF6);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 3);
// Wait for data to become available
while(Wire.available() < 3)
;
msb = Wire.read();
lsb = Wire.read();
xlsb = Wire.read();
up = (((unsigned long) msb << 16) | ((unsigned long) lsb << 8) | (unsigned long) xlsb) >> (8-OSS);
return up;
}
Testujemy. Jak? Po zaprogramowaniu, nie odpinamy ukladu od komputera, tylko w srodowisku arduino otwieramy okno "monitor szeregowy", predkosc transmisji ustawiamy na 9600 i cieszymy sie z efektow naszej pracy.
Najważniejsze, czyli JAK TO DZIALA?
Uklad podlaczamy pod wolny kanal odbiornika (zasilanie 5V). Od razu po wlaczeniu, program sprawdza czy obecna jest karta SD, nastepnie tworzony jest na karcie plik TXT z kolejnym numerkiem w nazwie i urzadzonko zaczyna w nim zapisywac:
czas (ms), cisnienie (hPa), wysokosc bezwzgledna(m n.p.m.), wysokosci bezwzgledna po filtrze dolnoprzepustowym(m n.p.m.), wartosc PWM zczytana z kanalu w ktory wpiety jest logger.
Czas pomiedzy kolejnymi zapisami to okolo 2sek.
Poziom PWM osobiscie wykorzystuje jako znacznik, kiedy zmieniam w terenie parametry lotu i pozniej w domu analizujac chce wiedziec dokladnie ktora czesc barografki odpowiada jakiemu ustawieniu modelu.
Odczyt danych:
Wyjmujemy karte mikroSD, wkladamy do czytnika i zgrywamy pliki *.txt. Nastepnie otwieramy plik txt przy pomocy excela, wybierajac jako separator przecinek ",".
W kolejnych kolumnach mamy zapisane:
>> czas [ms]
>> cisnienie [hPa]
>> wysokosc bezwzgledna [m n.p.m.]
>> wartosc wysokosci po filtrze dolnoprzepustowym [m n.p.m.]
>>Wartość PWM
Mam nadzieje ze nie popelnilem tu zadnych bledow, dlatego jesli ktos sie pokusi o poskladanie loggera prosze o info czy wszystko jest OK.
===================================================================================
Kolejny projekt to wariometr. Urzadzenie pracujace na 433MHz, no i niestety cena juz jest znaczaco wyzsza, bo wynosci bedzie okolo 21zl.
Zakupy:
nadajnik latajacy w modelu:
1) plytka arduino pro mini (1,25$)
2) plyteczka z czujnikiem cisnienia BMP180 (2,50$)
3) nadajnik i odbiornik na 433MHz ( odbiornik XY-MK-5V, nadajnik fs1000a) (0,60$)
4) kabelek od serwa (z szuflady - 0$).
odbiornik na ziemi:
5) wzmacniacz audio (scalak LM386, w PL jakies 2zl)
6) jakis glosniczek - ja skorzystalem ze starej kolumienki od glosnikow komputerowych (skorzystalem z tej z gniazdem jack oraz potencjometrem z wylacznikiem).
7) bakteria (ja uzywam lipola 2s i stabilizatora 7805).
No to zaczynamy. Cale wario opisane jest bardzo dokladnie tu:
https://www.rcgroups.com/forums/showthread.php?t=1749208
oraz tu bardziej zaawansowana wersja:
http://www.modelbouwforum.nl/threads/poor-mans-vario.199904/page-5
Nadajnik:
Podlaczenie kabelka serwa do arduino robimy jak w schemacie z dataloggera z ta roznicza ze przewod sygnalu PWM podpinamy pod pin 3 arduino. Czujnik cisnienia podpinamy jak na schemacie dataloggera.
Nadajnik fs1000a podpinamy w nastepujacy sposob:
GND - do GND arduino czyli (-) zasilania
DATA - do pinu 2 arduino.
VCC - do VCC 5V arduino.
AND - dolutowac tu nalezy antenke w postaci przewodu o dlugosci 16,5cm
Odbiornik
Zaczynamy od podpiecia do osbiornika zasilania 5V pomiedzy VCC i GND, oraz glosniczka pomiedzy DATA i GND.
Do AND dolutowujemy kabelek 16,5cm.
Program:
//**********************************
//* BMP085 and BMP180 version *
//**********************************
// This is the Poor Mans Vario code for the cheaper BMP085 and the BMP180 sensor by BOSCH Sensortec
// Arduino <> Sensor: Connect VCC to VCC and GND to GND, SCL goes to analogue pin 5, SDA to analogue pin4.
// Servo signal input, connect to Arduino pin D3
// Audio output to transmitter on pin D2
// All code by Rolf R Bakke, Oct 2012
// Modified by Hans Meijdam, June 2013: added altitude feature
// Modified by Hans Meijdam, November 2013: Sensor routine created for BMP085 and BMP180.
// Modified by Hans Meijdam, July 2014: BETA Version
// - Switch to select if whole meters are called out if below 100 meters altitude
// - Deadband to make vario silent if no certain climb or sink level is achieved
// - Negative altitude becomes now indicated as if it was positive altitude
//
//
// ****** This is a customizable variable that acts as a switch *****
// choose "1" if you also want to hear the altitude in meters if you fly below 100 meters.
// choose "0" if you only want to hear the 10 meters rounded altitude at all times.
// Default is 0.
// const byte altitude_per_meter = 0; // only altitude in 10 meters
const byte altitude_per_meter = 1; // altitude in whole meters if below 100 meters
// ****** This is a customizable variable (0 - 500 range) that defines how large the dead band is ******
// A dead band of "0" (= default) means that the vario will beep constantly, even with no climb or sink at all.
// A small dead band (e.g. value 25 - 50) means that with a small amount of climb or sink the vario will start beeping
// A medium dead band (e.g. value 50 - 100) means that the vario will be silent, unless it observes a medium rate of climb or medium rate of sink.
// A high dead band (> 100) makes the vario only active at high rates of sink or climb.
// int deadband = 0; // no deadband or deadband defined by potmeter
int deadband = 25; // small deadband
// int deadband = 75; // medium deadband
// int deadband = 150; // large deadband
// ****** Alternatively the deadband can be dynamically set by connecting a 10K potmeter over pins 12, A1 (rocker) and A2 ******
const byte deadbandpotmeter = 0; // no deadband potmeter present
// const char deadbandpotmeter = 1; // deadband potmeter is present (10K potmeter over pins 12, A1 (rocker) and A2)
#include "Wire.h"
const byte led = 13;
unsigned long time = 0;
float toneFreq, toneFreqLowpass, flpressure, lowpassFast, lowpassSlow ;
float p0; // this will be used to store the airfield elevation pressure
int altitude;
int ch1; // Here's where we'll keep our channel values
int ddsAcc;
#define I2C_ADDRESS 0x77
const unsigned char oversampling_setting = 3; //oversamplig for measurement
const unsigned char pressure_waittime[4] = {
5, 8, 14, 26 };
//Sensor parameters taken from the BMP085 datasheet
int ac1, ac2, ac3;
unsigned int ac4, ac5, ac6;
int b1, b2, mb, mc, md;
int temperature;
long pressure;
int analogpin1 = 0;
void setup()
{
pinMode(A2, OUTPUT); // Prepare for high end of potmeter
pinMode(12, OUTPUT); // Prepare for low end of potmeter
pinMode(A1, INPUT_PULLUP); // Prepare for potmeter input
digitalWrite(A2, HIGH); // High end potmeter to 5 volt
digitalWrite(12, LOW); //Low end potmeter to 0 volt
Serial.begin(9600); // start serial for output
analogpin1 = analogRead(1); // read the input pin A1 potmeter value
// Serial.print("Analog pin A0 value: ");
// Serial.println(analogpin1);
// Serial.println("Setting up BMP085");
Wire.begin();
bmp085_get_cal_data();
bmp085_read_temperature_and_pressure(&temperature,&pressure);
flpressure=pressure;// move long type pressure into float type flpressure
p0 = lowpassFast = lowpassSlow = flpressure;
Serial.print(" p0 = ");
Serial.println(p0);
pinMode(3, INPUT); // Set our input pins as such for altitude command input from receiver via pin D3
}
void loop()
{
bmp085_read_temperature_and_pressure(&temperature,&pressure);
// Serial.print(temperature,DEC);
// Serial.print(" ");
// Serial.println(pressure,DEC);
// Serial.print(" ");
flpressure = pressure;// move long type pressure into float type flpressure
altitude = (float)44330 * (1 - pow(((float) flpressure/p0), 0.190295));
//Serial.print(" ");
// Serial.print(altitude);
altitude = abs(altitude); // if flying from hills negative altitude becomes indicated as positive
lowpassFast = lowpassFast + (flpressure - lowpassFast) * 0.2;
lowpassSlow = lowpassSlow + (flpressure - lowpassSlow) * 0.1;
toneFreq = (lowpassSlow - lowpassFast) * 50;
toneFreqLowpass = toneFreqLowpass + (toneFreq - toneFreqLowpass) * 0.1;
toneFreq = constrain(toneFreqLowpass, -500, 500);
ddsAcc += toneFreq * 100 + 2000;
Serial.print(" ddsAcc: ");
Serial.println(ddsAcc);
if (deadbandpotmeter == 1)
{
analogpin1 = analogRead(1); // read the input pin A1 potmeter value
deadband = map(analogpin1, 0, 1024, 500, 0); // map potmeter value to deadband range from 500 - 0
}
if (toneFreq < 0 || ddsAcc > 0)
{
if (abs(toneFreq)>deadband)
{
tone(2, toneFreq + 550);
ledOn(); // the Arduino led will blink if the Vario plays a tone, so you can test without having audio connected
}
}
else
{
noTone(2);
ledOff();
}
while (millis() < time); //loop frequency timer
time += 20;
int ones = altitude%10;
int tens = (altitude/10)%10;
int hundreds = (altitude/100)%10;
int thousands = (altitude/1000)%10;
// Serial.print ("thousands: ");
// Serial.println (thousands);
// Serial.print ("hundreds: ");
// Serial.println (hundreds);
// Serial.print ("tens: ");
// Serial.println (tens);
// Serial.print ("ones: ");
// Serial.println (ones);
ch1 = pulseIn(3, HIGH, 25000); // Read the pulse width of servo signal connected to pin D3
// Serial.print (ch1);
//
// if(ch1>1000){
// Serial.println("Left Switch: Engaged");
// }
// if(ch1<1000){
// Serial.println("Left Switch: Disengaged");
// }
if((map(ch1, 1000,2000,-500,500)) > 0) // interpret the servo channel pulse, if the Vario should beep altitude or send vario sound
{
noTone(2); // create 750 ms of silence, or you won't hear the first altitude beep
ledOff();
delay(750);
if(hundreds == 0)
{
tone(2,900); //long duration tone if the number is zero
ledOn();
delay(600);
noTone(2);
ledOff();
}
else
for(char a = 0; a < hundreds; a++) //this loop makes a beep for each hundred meters altitude
{
tone(2,900); // 900 Hz tone frequency for the hundreds
ledOn();
delay(200);
noTone(2);
ledOff();
delay(200);
}
delay(750); //longer delay between hundreds and tens
if(tens == 0)
{
tone(2,1100); //long pulse if the number is zero
ledOn();
delay(600);
noTone(2);
ledOff();
}
else
for(char a = 0; a < tens; a++) //this loop makes a beep for each ten meters altitude
{
tone(2,1100); //1100 Hz tone frequency for the tens
ledOn();
delay(200);
noTone(2);
ledOff();
delay(200);
}
if (altitude_per_meter == 1 && hundreds == 0)
{
delay(750); //longer delay between tens and ones
if(ones == 0)
{
tone(2,1300); //long pulse if the number is zero
ledOn();
delay(600);
noTone(2);
ledOff();
}
else
for(char a = 0; a < ones; a++) //this loop makes a beep for each meter altitude
{
tone(2,1300); //1300 Hz tone frequency for the ones
ledOn();
delay(200);
noTone(2);
ledOff();
delay(200);
}
}
}
}
void bmp085_read_temperature_and_pressure(int* temperature, long* pressure) {
int ut= bmp085_read_ut();
long up = bmp085_read_up();
long x1, x2, x3, b3, b5, b6, p;
unsigned long b4, b7;
//calculate the temperature
x1 = ((long)ut - ac6) * ac5 >> 15;
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
*temperature = (b5 + 8) >> 4;
//calculate the pressure
b6 = b5 - 4000;
x1 = (b2 * (b6 * b6 >> 12)) >> 11;
x2 = ac2 * b6 >> 11;
x3 = x1 + x2;
if (oversampling_setting == 3) b3 = ((int32_t) ac1 * 4 + x3 + 2) << 1;
if (oversampling_setting == 2) b3 = ((int32_t) ac1 * 4 + x3 + 2);
if (oversampling_setting == 1) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 1;
if (oversampling_setting == 0) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 2;
x1 = ac3 * b6 >> 13;
x2 = (b1 * (b6 * b6 >> 12)) >> 16;
x3 = ((x1 + x2) + 2) >> 2;
b4 = (ac4 * (uint32_t) (x3 + 32768)) >> 15;
b7 = ((uint32_t) up - b3) * (50000 >> oversampling_setting);
p = b7 < 0x80000000 ? (b7 * 2) / b4 : (b7 / b4) * 2;
x1 = (p >> 8) * (p >> 8);
x1 = (x1 * 3038) >> 16;
x2 = (-7357 * p) >> 16;
*pressure = p + ((x1 + x2 + 3791) >> 4);
}
unsigned int bmp085_read_ut() {
write_register(0xf4,0x2e);
delay(5); //longer than 4.5 ms
return read_int_register(0xf6);
}
void bmp085_get_cal_data() {
// Serial.println("Reading Calibration Data");
ac1 = read_int_register(0xAA);
// Serial.print("AC1: ");
// Serial.println(ac1,DEC);
ac2 = read_int_register(0xAC);
// Serial.print("AC2: ");
// Serial.println(ac2,DEC);
ac3 = read_int_register(0xAE);
// Serial.print("AC3: ");
// Serial.println(ac3,DEC);
ac4 = read_int_register(0xB0);
// Serial.print("AC4: ");
// Serial.println(ac4,DEC);
ac5 = read_int_register(0xB2);
// Serial.print("AC5: ");
// Serial.println(ac5,DEC);
ac6 = read_int_register(0xB4);
// Serial.print("AC6: ");
// Serial.println(ac6,DEC);
b1 = read_int_register(0xB6);
// Serial.print("B1: ");
// Serial.println(b1,DEC);
b2 = read_int_register(0xB8);
// Serial.print("B2: ");
// Serial.println(b2,DEC);
mb = read_int_register(0xBA);
// Serial.print("MB: ");
// Serial.println(mb,DEC);
mc = read_int_register(0xBC);
// Serial.print("MC: ");
// Serial.println(mc,DEC);
md = read_int_register(0xBE);
// Serial.print("MD: ");
// Serial.println(md,DEC);
}
long bmp085_read_up() {
write_register(0xf4,0x34+(oversampling_setting<<6));
delay(pressure_waittime[oversampling_setting]);
unsigned char msb, lsb, xlsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(0xf6); // register to read
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 3); // read a byte
while(!Wire.available()) {
// waiting
}
msb = Wire.read();
while(!Wire.available()) {
// waiting
}
lsb |= Wire.read();
while(!Wire.available()) {
// waiting
}
xlsb |= Wire.read();
return (((long)msb<<16) | ((long)lsb<<8) | ((long)xlsb)) >>(8-oversampling_setting);
}
void write_register(unsigned char r, unsigned char v)
{
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.write(v);
Wire.endTransmission();
}
char read_register(unsigned char r)
{
unsigned char v;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r); // register to read
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 1); // read a byte
while(!Wire.available()) {
// waiting
}
v = Wire.read();
return v;
}
int read_int_register(unsigned char r)
{
unsigned char msb, lsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r); // register to read
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 2); // read a byte
while(!Wire.available()) {
// waiting
}
msb = Wire.read();
while(!Wire.available()) {
// waiting
}
lsb = Wire.read();
return (((int)msb<<8) | ((int)lsb));
}
void ledOn()
{
digitalWrite(led,1);
}
void ledOff()
{
digitalWrite(led,0);
}
Jak to dziala?
Nadajniczek wariometru wpinamy w wolny slot w odbiorniku RC (zasilanie 5V) sterowany w aparaturze rc przelacznikiem.
Dzialanie zalezy od ustawienia wspomnianego przelacznika: W pierwszej skrajnej pozycji wariometr mierzy wysokosc, przepuszcza przez dwa filtry dolnoprzepustowe a z roznicy wartosci miedzy wynikami z tych dwoch filtrow wylicza czestotliwosc dzwieku. Wysyla sygnal do nadajnika, a odbiornik nie robi nic poza odbiorem analogowego sygnalu i wysterowaniem glosniczka.
W drugiej skrajnej pozycji przelacznika wariometr "pikajac" podaje wysokosc. Wyjasnione jest to w komentarzach w kodzie programu.
Cieszymy sie z dzialania, ale... jest cicho i zasieg na kilka metrow. Czyli slabo.
Operacja pierwsza - modyfikacja odbiornika:
Odbiornik musimy wyposarzyc we wzmacniacz audio. W tym celu wykorzystamy scalony wmacniacz LM386 oraz stara kolumne od glosnikow komputerowych, w ktorej znajdziemy glosnik, potencjometr i gniazdko sluchawkowe (pomocne gdy na startowisku jest wiecej niz jeden modelarz).
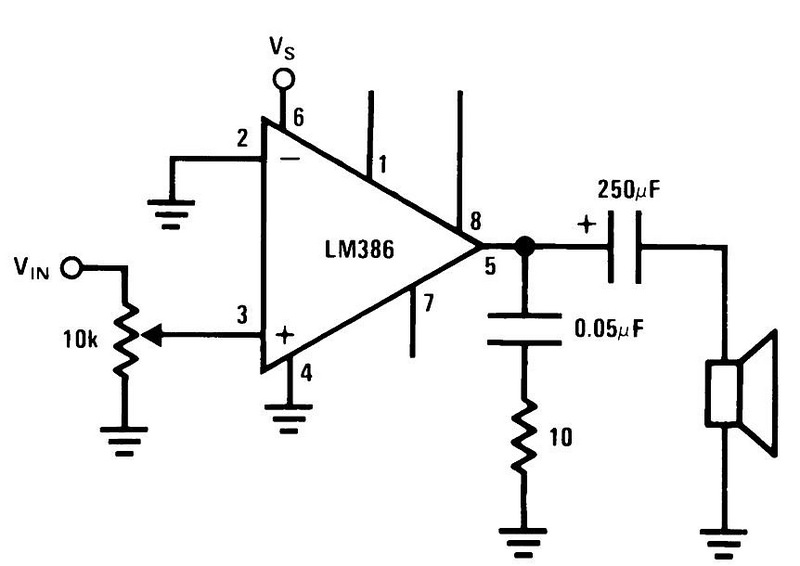
Korzystamy z tego schematu:
Czy to trudne? Nie wzmacniacz z powodzeniem mozemy poskladac "na pajaka", Vin to nasz sygnal z odbiorniczka (dwa zwarte piny podpisane DATA), sygnal ten trafia na dzielnik z potencjometru i na noge nr 3 ukladu scalonego. Noga 2 i 4 zwieramy do GND, noge nr 6 podpinamy do zasilania 5v. Noge nr 5 zapinamy do masy przez maly kondensator 0,05uF i opornik 10ohm. Glosnik wpinamy miedzy GND i noge nr 5 - szeregowo z kondensatorem elektrolitycznym 250uF
Koszt super wzmiacniacza - 5zl
Operacja druga - modyfikacja anteny odbiornika:
Duzo lepszy zasieg otrzymamy stosujac zamiast antenki "bacika" antene typu dipol. Co potrzebujemy? Ok 50cm przewodu ekranowanego (np tego miedzy komputerem a wspomnianymi starymi glosniczkami).
Jeden koniec podpinamy do odbiornika:
>>ekran do GND
>>zyla do ANT
Na drugim koncu przewodu wykonujemy antene: Odizolowac nalezy 16,5cm przewodu i oddzielic ekranosobno i zyle sygnalowa osobno. Nastepnie odgiac ekran w jedna strone a zyle sygnalowa w druga, tak aby z przewodem do odbiornika utworzyly ksztalt litery T, lub Y. Oczywiscie konstrukcje dobrze jest usztywnic drewnianym patyczkiem lub precikiem z tworzywa sztucznego.
Zdjecie zaporzyczone z sasiedniego forum
Operacja trzecia - zasilanie nadajnika:
Bardzo waznym parametrem wyplywajacym bezposrednio na moc nadawanego sygnalu jest napiecie zasilania nadajnika. Skoro tak, to przy samym nadajniku miedzy piny GND i VCC nalezy wlutowac kondensator elektrolityczny (wystarczy 100uF, nalezy pamietac o polaryzacji kondensatora elektrolitycznego).
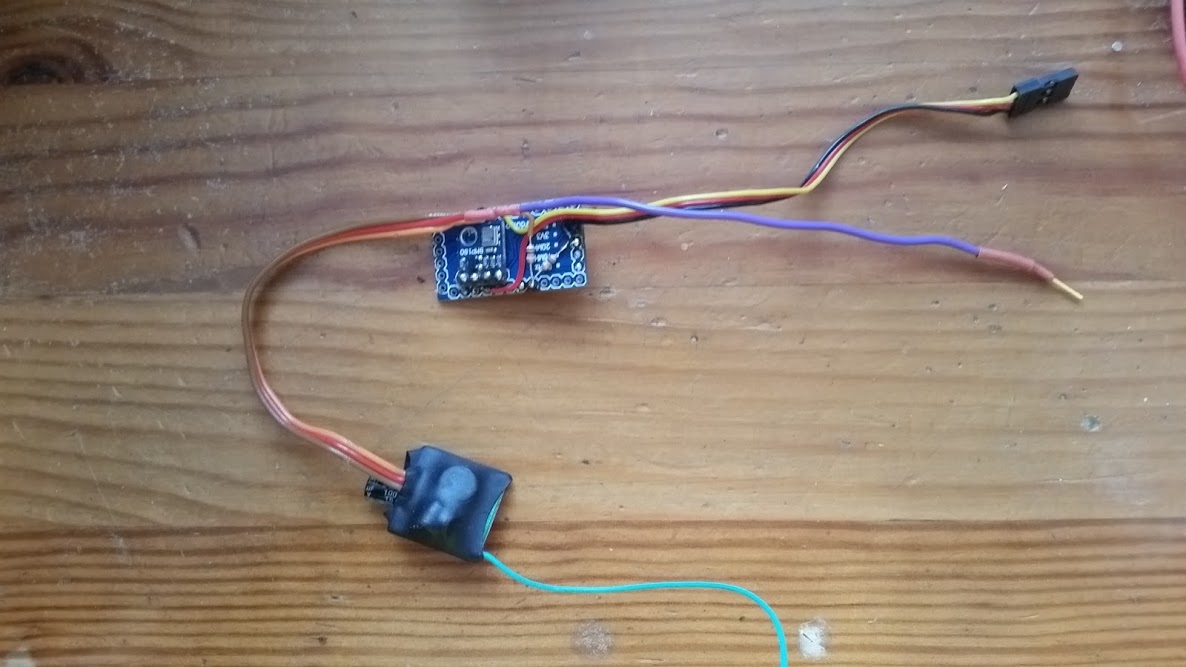
Osobiscie zasilam model z lipo 2S 7,2V przez tzw BEC. Zasilajac wariometr z odbiornika RC zasilam go napieciem 5V. Zatem prosta modyfikacja znacznie poprawiajaca zasieg, jest odlutowanie przewodu zasilajacego pomiedzy arduino i nadajniczkiem VCC fs1000a. I zasilenie nadajniczka 433MHz bezposrednio z lipola (np. z gniazda balansera - jak na foto mojego wariometru:
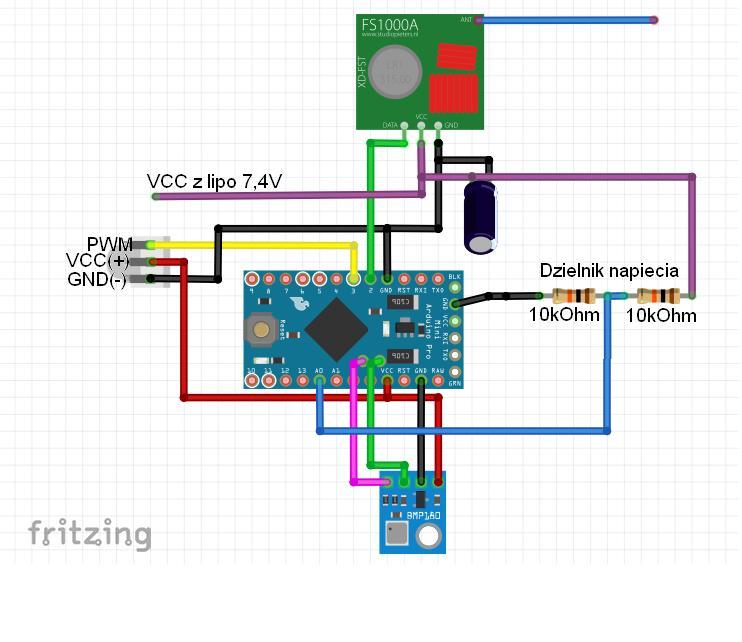
Schematy nadajnika po wspomnianych modyfikacjach zasilania:
jakie
Schemat odbiornika ze wzmacniaczem i antena dipol
Mam nadzieje ze nic nie pomylilem, poniewaz schematy powstaly tylko na potrzebe tego postu.
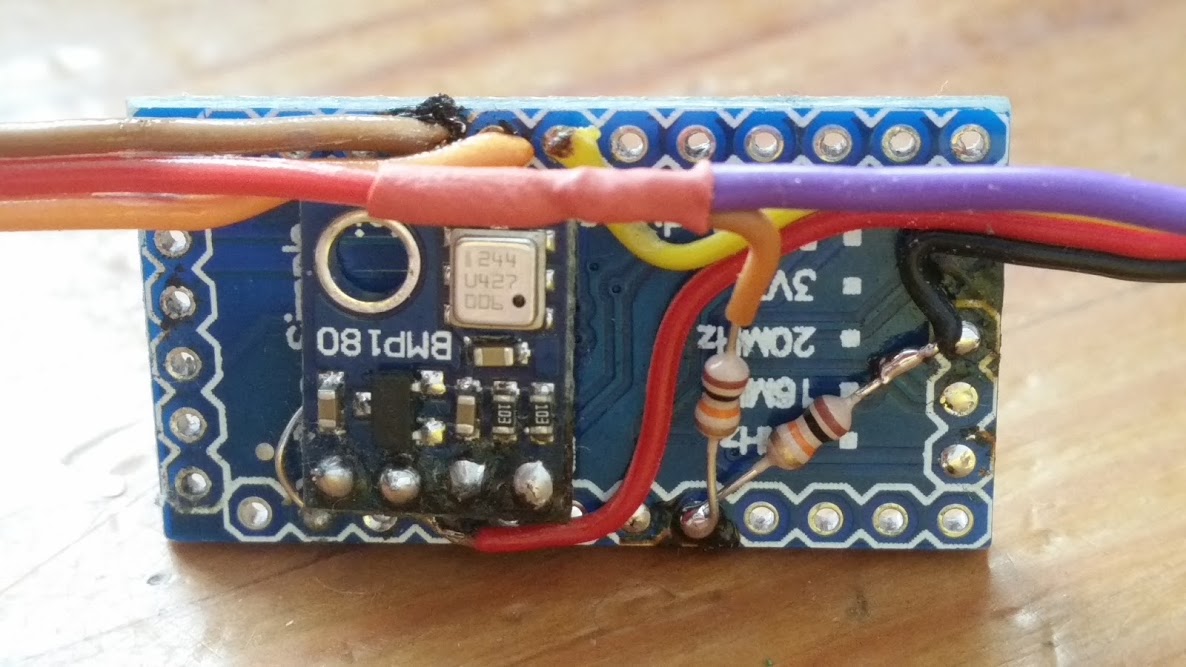
Na zdjeciu mojego wario widać, że fioletowy przewod podlaczany do lipola wchodzi pod termokurcza na arduino i dopiero tam jest polaczony z zasilajacym przewodem do nadajniczka. A to dlatego, ze pod termokurczem zrobiony jest dzielnik napiecia z dwoch rezystorow i podlaczony do wejscia analogowego arduino. Chodzi o to ze arduino ma mierzyc napiecie na lipolu i w momencie spadku ponizej zadanej wartosci w glosniku wariometru ma byc slyszalny alarm. Przedstawie to rozwiazanie ponizej.
======================================================================================
Wariometr modelarski z pomiarem napiecia baterii lipo i alarmem rozladowanej baterii
Wariometr wykonujemy dokladnie tak jak to opisano powyzej, w wersji podlaczenia zasilania nadajnika fs1000a bezposrednio do lipola 2S (napiecie pomiedzy 8,4V a 7,2V).
Jedyna modyfikacją jest dolutowanie dzielnika napiecia zrobionego z dwoch opornikow 10kOhm. Zgodnie ze schematem:
Oczywiscie pamietajmy, ze wszystkie piny w arduino podpisane GND sa ze soba zwarte, podobnie piny VCC. Chcac podlutowac sie pod mase od nas zalezy ktory pin podpisany GND wybierzemy. Dlatego ponizsze zdjecia przedstawiajace moje wario nie sa w 100% zgodne ze schematem:
Wariometr bez koszulki:
Zblizenie na podlaczenie na plytce arduino:
Komplet elektroniki jaki lata w moim modelu (oczywiscie plus serwa):
Kod programu:
//**********************************
//* BMP085 and BMP180 version *
//**********************************
// This is the Poor Mans Vario code for the cheaper BMP085 and the BMP180 sensor by BOSCH Sensortec
// Arduino <> Sensor: Connect VCC to VCC and GND to GND, SCL goes to analogue pin 5, SDA to analogue pin4.
// Servo signal input, connect to Arduino pin D3
// Audio output to transmitter on pin D2
// All code by Rolf R Bakke, Oct 2012
// Modified by Hans Meijdam, June 2013: added altitude feature
// Modified by Hans Meijdam, November 2013: Sensor routine created for BMP085 and BMP180.
// Modified by Hans Meijdam, July 2014: BETA Version
// - Switch to select if whole meters are called out if below 100 meters altitude
// - Deadband to make vario silent if no certain climb or sink level is achieved
// - Negative altitude becomes now indicated as if it was positive altitude
//
//
// ****** This is a customizable variable that acts as a switch *****
// choose "1" if you also want to hear the altitude in meters if you fly below 100 meters.
// choose "0" if you only want to hear the 10 meters rounded altitude at all times.
// Default is 0.
// const byte altitude_per_meter = 0; // only altitude in 10 meters
const byte altitude_per_meter = 1; // altitude in whole meters if below 100 meters
// ****** This is a customizable variable (0 - 500 range) that defines how large the dead band is ******
// A dead band of "0" (= default) means that the vario will beep constantly, even with no climb or sink at all.
// A small dead band (e.g. value 25 - 50) means that with a small amount of climb or sink the vario will start beeping
// A medium dead band (e.g. value 50 - 100) means that the vario will be silent, unless it observes a medium rate of climb or medium rate of sink.
// A high dead band (> 100) makes the vario only active at high rates of sink or climb.
// int deadband = 0; // no deadband or deadband defined by potmeter
int deadband = 25; // small deadband
// int deadband = 75; // medium deadband
// int deadband = 150; // large deadband
// ****** Alternatively the deadband can be dynamically set by connecting a 10K potmeter over pins 12, A1 (rocker) and A2 ******
const byte deadbandpotmeter = 0; // no deadband potmeter present
//const char deadbandpotmeter = 1; // deadband potmeter is present (10K potmeter over pins 12, A1 (rocker) and A2)
#include "Wire.h"
const byte led = 13;
unsigned long time = 0;
float toneFreq, toneFreqLowpass, flpressure, lowpassFast, lowpassSlow ;
float p0; // this will be used to store the airfield elevation pressure
int altitude;
int ch1; // Here's where we'll keep our channel values
int ddsAcc;
#define I2C_ADDRESS 0x77
const unsigned char oversampling_setting = 3; //oversamplig for measurement
const unsigned char pressure_waittime[4] = {
5, 8, 14, 26 };
//Sensor parameters taken from the BMP085 datasheet
int ac1, ac2, ac3;
unsigned int ac4, ac5, ac6;
int b1, b2, mb, mc, md;
int temperature;
long pressure;
int analogpin1 = 0;
int analogpin2 = 0;
int voltage;
void setup()
{
pinMode(A0, INPUT); // pomiar npiecia baterii
pinMode(A2, OUTPUT); // Prepare for high end of potmeter
pinMode(12, OUTPUT); // Prepare for low end of potmeter
pinMode(A1, INPUT_PULLUP); // Prepare for potmeter input
digitalWrite(A2, HIGH); // High end potmeter to 5 volt
digitalWrite(12, LOW); //Low end potmeter to 0 volt
Serial.begin(9600); // start serial for output
analogpin1 = analogRead(A1); // read the input pin A1 potmeter value
Serial.print("Analog pin A1 value: ");
Serial.println(analogpin1);
// Serial.println("Setting up BMP085");
Wire.begin();
bmp085_get_cal_data();
bmp085_read_temperature_and_pressure(&temperature,&pressure);
flpressure=pressure;// move long type pressure into float type flpressure
p0 = lowpassFast = lowpassSlow = flpressure;
Serial.print(" p0 = ");
Serial.println(p0);
pinMode(3, INPUT); // Set our input pins as such for altitude command input from receiver via pin D3
}
void loop()
{
// Pomiar napiecia baterii, wartosc napiecia mnozona *10.
analogpin2 = analogRead(A0); // read the input pin A0 potmeter value
voltage = map(analogpin2, 0, 1024, 0, 100); // map potmeter value to deadband range from 0 - 100 (0-10v)
Serial.print("voltage= ");
Serial.print(voltage,DEC);
Serial.println("V");
if (voltage < 74) // jezeli napiecie pakietu nizsze niz 7,4v >> wlacz alarm
{
tone(2, 3000);
delay(100);
noTone(2);
delay(100);
tone(2, 3000);
delay(100);
noTone(2);
delay(100);
}
bmp085_read_temperature_and_pressure(&temperature,&pressure);
// Serial.print(temperature,DEC);
// Serial.print(" ");
// Serial.println(pressure,DEC);
// Serial.print(" ");
flpressure = pressure;// move long type pressure into float type flpressure
altitude = (float)44330 * (1 - pow(((float) flpressure/p0), 0.190295));
//Serial.print(" ");
// Serial.print(altitude);
altitude = abs(altitude); // if flying from hills negative altitude becomes indicated as positive
lowpassFast = lowpassFast + (flpressure - lowpassFast) * 0.2;
lowpassSlow = lowpassSlow + (flpressure - lowpassSlow) * 0.1;
toneFreq = (lowpassSlow - lowpassFast) * 50;
toneFreqLowpass = toneFreqLowpass + (toneFreq - toneFreqLowpass) * 0.1;
toneFreq = constrain(toneFreqLowpass, -500, 500);
ddsAcc += toneFreq * 100 + 2000;
Serial.print(" ddsAcc: ");
Serial.println(ddsAcc);
if (deadbandpotmeter == 1)
{
analogpin1 = analogRead(A1); // read the input pin A1 potmeter value
deadband = map(analogpin1, 0, 1024, 500, 0); // map potmeter value to deadband range from 500 - 0
}
if (toneFreq < 0 || ddsAcc > 0)
{
if (abs(toneFreq)>deadband)
{
tone(2, toneFreq + 550);
ledOn(); // the Arduino led will blink if the Vario plays a tone, so you can test without having audio connected
}
}
else
{
noTone(2);
ledOff();
}
while (millis() < time); //loop frequency timer
time += 20;
int ones = altitude%10;
int tens = (altitude/10)%10;
int hundreds = (altitude/100)%10;
int thousands = (altitude/1000)%10;
// Serial.print ("thousands: ");
// Serial.println (thousands);
// Serial.print ("hundreds: ");
// Serial.println (hundreds);
// Serial.print ("tens: ");
// Serial.println (tens);
// Serial.print ("ones: ");
// Serial.println (ones);
ch1 = pulseIn(3, HIGH, 25000); // Read the pulse width of servo signal connected to pin D3
// Serial.print (ch1);
//
// if(ch1>1000){
// Serial.println("Left Switch: Engaged");
// }
// if(ch1<1000){
// Serial.println("Left Switch: Disengaged");
// }
if((map(ch1, 1000,2000,-500,500)) > 0) // interpret the servo channel pulse, if the Vario should beep altitude or send vario sound
{
noTone(2); // create 750 ms of silence, or you won't hear the first altitude beep
ledOff();
delay(750);
if(hundreds == 0)
{
tone(2,900); //long duration tone if the number is zero
ledOn();
delay(600);
noTone(2);
ledOff();
}
else
for(char a = 0; a < hundreds; a++) //this loop makes a beep for each hundred meters altitude
{
tone(2,900); // 900 Hz tone frequency for the hundreds
ledOn();
delay(200);
noTone(2);
ledOff();
delay(200);
}
delay(750); //longer delay between hundreds and tens
if(tens == 0)
{
tone(2,1100); //long pulse if the number is zero
ledOn();
delay(600);
noTone(2);
ledOff();
}
else
for(char a = 0; a < tens; a++) //this loop makes a beep for each ten meters altitude
{
tone(2,1100); //1100 Hz tone frequency for the tens
ledOn();
delay(200);
noTone(2);
ledOff();
delay(200);
}
if (altitude_per_meter == 1 && hundreds == 0)
{
delay(750); //longer delay between tens and ones
if(ones == 0)
{
tone(2,1300); //long pulse if the number is zero
ledOn();
delay(600);
noTone(2);
ledOff();
}
else
for(char a = 0; a < ones; a++) //this loop makes a beep for each meter altitude
{
tone(2,1300); //1300 Hz tone frequency for the ones
ledOn();
delay(200);
noTone(2);
ledOff();
delay(200);
}
}
}
}
void bmp085_read_temperature_and_pressure(int* temperature, long* pressure) {
int ut= bmp085_read_ut();
long up = bmp085_read_up();
long x1, x2, x3, b3, b5, b6, p;
unsigned long b4, b7;
//calculate the temperature
x1 = ((long)ut - ac6) * ac5 >> 15;
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
*temperature = (b5 + 8) >> 4;
//calculate the pressure
b6 = b5 - 4000;
x1 = (b2 * (b6 * b6 >> 12)) >> 11;
x2 = ac2 * b6 >> 11;
x3 = x1 + x2;
if (oversampling_setting == 3) b3 = ((int32_t) ac1 * 4 + x3 + 2) << 1;
if (oversampling_setting == 2) b3 = ((int32_t) ac1 * 4 + x3 + 2);
if (oversampling_setting == 1) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 1;
if (oversampling_setting == 0) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 2;
x1 = ac3 * b6 >> 13;
x2 = (b1 * (b6 * b6 >> 12)) >> 16;
x3 = ((x1 + x2) + 2) >> 2;
b4 = (ac4 * (uint32_t) (x3 + 32768)) >> 15;
b7 = ((uint32_t) up - b3) * (50000 >> oversampling_setting);
p = b7 < 0x80000000 ? (b7 * 2) / b4 : (b7 / b4) * 2;
x1 = (p >> 8) * (p >> 8);
x1 = (x1 * 3038) >> 16;
x2 = (-7357 * p) >> 16;
*pressure = p + ((x1 + x2 + 3791) >> 4);
}
unsigned int bmp085_read_ut() {
write_register(0xf4,0x2e);
delay(5); //longer than 4.5 ms
return read_int_register(0xf6);
}
void bmp085_get_cal_data() {
// Serial.println("Reading Calibration Data");
ac1 = read_int_register(0xAA);
// Serial.print("AC1: ");
// Serial.println(ac1,DEC);
ac2 = read_int_register(0xAC);
// Serial.print("AC2: ");
// Serial.println(ac2,DEC);
ac3 = read_int_register(0xAE);
// Serial.print("AC3: ");
// Serial.println(ac3,DEC);
ac4 = read_int_register(0xB0);
// Serial.print("AC4: ");
// Serial.println(ac4,DEC);
ac5 = read_int_register(0xB2);
// Serial.print("AC5: ");
// Serial.println(ac5,DEC);
ac6 = read_int_register(0xB4);
// Serial.print("AC6: ");
// Serial.println(ac6,DEC);
b1 = read_int_register(0xB6);
// Serial.print("B1: ");
// Serial.println(b1,DEC);
b2 = read_int_register(0xB8);
// Serial.print("B2: ");
// Serial.println(b2,DEC);
mb = read_int_register(0xBA);
// Serial.print("MB: ");
// Serial.println(mb,DEC);
mc = read_int_register(0xBC);
// Serial.print("MC: ");
// Serial.println(mc,DEC);
md = read_int_register(0xBE);
// Serial.print("MD: ");
// Serial.println(md,DEC);
}
long bmp085_read_up() {
write_register(0xf4,0x34+(oversampling_setting<<6));
delay(pressure_waittime[oversampling_setting]);
unsigned char msb, lsb, xlsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(0xf6); // register to read
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 3); // read a byte
while(!Wire.available()) {
// waiting
}
msb = Wire.read();
while(!Wire.available()) {
// waiting
}
lsb |= Wire.read();
while(!Wire.available()) {
// waiting
}
xlsb |= Wire.read();
return (((long)msb<<16) | ((long)lsb<<8) | ((long)xlsb)) >>(8-oversampling_setting);
}
void write_register(unsigned char r, unsigned char v)
{
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.write(v);
Wire.endTransmission();
}
char read_register(unsigned char r)
{
unsigned char v;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r); // register to read
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 1); // read a byte
while(!Wire.available()) {
// waiting
}
v = Wire.read();
return v;
}
int read_int_register(unsigned char r)
{
unsigned char msb, lsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r); // register to read
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 2); // read a byte
while(!Wire.available()) {
// waiting
}
msb = Wire.read();
while(!Wire.available()) {
// waiting
}
lsb = Wire.read();
return (((int)msb<<8) | ((int)lsb));
}
void ledOn()
{
digitalWrite(led,1);
}
void ledOff()
{
digitalWrite(led,0);
}
Jak to dziala? W glownej ptli programu mierzone jest napiecie na pinie A0 do ktorego podlaczone przez dzielnik jest zasilanie z lipolka. Sygnal przeliczany jest na wartosc napiecia brutto na lipolu mnozona *10.
Jesli warunek jest spelniony napiecie<7,4V (w programie warunek "voltage<74 ")w glosniku uslyszymy charaktrystyczne pikanie.
Oczywiscie wartosc 7,4v mozemy zmieniac dowolnie. Nalezy jednak pamietac ze pomiar napiecia jest wzgledem napiecia zasilania procesora w arduino 5V. Czyli jesli napiecie lipolka spadnie na tyle, ze po BECu napiecie bedzie nizsze niz wspomniane 5V, pomiar bedzie obarczony bledem.
Obawiam sie, czy spadki napiecia spowodowane przez dzialajace serwa, nie beda powodowaly zadzialanie alarmu. Jesli tak, dopisze filtr dolnoprzepustowy na pomiar napiecia. Niestety teraz pogoda nie nastraja na proby terenowe, a tylko wtedy bede wiedzial czy pomiar dziala jak nalezy.