Pioterek
-
Postów
3 554 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
18
Treść opublikowana przez Pioterek
-

2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Masz rację, zrobione trochę dla oka, eksperymentuję z tym styropianem bo to nowy dla mnie materiał. -
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Pomierzyłem dzisiaj parametry zmontowanego modelu: Waga do lotu z pakietem 4S 5300 mAh i pakietem FPV - 3,25 kg Ciąg statyczny napędu przy naładowanym pakiecie - 2,10 kg Prąd max. pobierany przez silnik - 36 A Śmigło XOAR 11x5 Ciąg silnika do masy modelu - 0,65 Silnik modelu może pracować katalogowo ze śmigłem max. 11x7 i wtedy powinien dać ciąg 2,4 kg. wtedy ciąg silnika do masy modelu wyniósłby - 0,74 Model ma startować z trawy. Myślę, że przy niedużej trawie śmigło XOAR 11x5 powinno dać sobie radę z krótkim startem ale jest trawa i trawa i wtedy w rezerwie pozostaje APC 11x7. Tej wielkości silnik pobiera w spokojnym prostoliniowym locie ok 10 A co przy pakiecie 5,3 Ah daje 0,53 godz lotu. Ale oczywiście jest to wyliczenie teoretyczne. Myślę, że 20 minut lotu na silniku (nie licząc czasu szybowania) będzie wynikiem który mnie zadowoli. Wyważenie modelu bez problemu -
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Poprawiłem chłodzenie napędu. Regulator powędrował na zewnątrz kadłuba a silnik otrzymał 3 nowe otwory chłodzące. A pro po odlutowanych od ciepła kabli - w modelu mam regulator Robbe - szkoda że firma już nie istnieje. Chciałem dzisiaj wprost do regulatora dolutować dłuższy kabel - nie dało rady spoiwo przy kablach prądowych jest wysoko temperaturowe i moja stacja lutownicza co lutuje wszystko nie dała rady - dałem spokój, żeby nie przegrzać złącza. Niemcy i o tym pomyśleli.
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
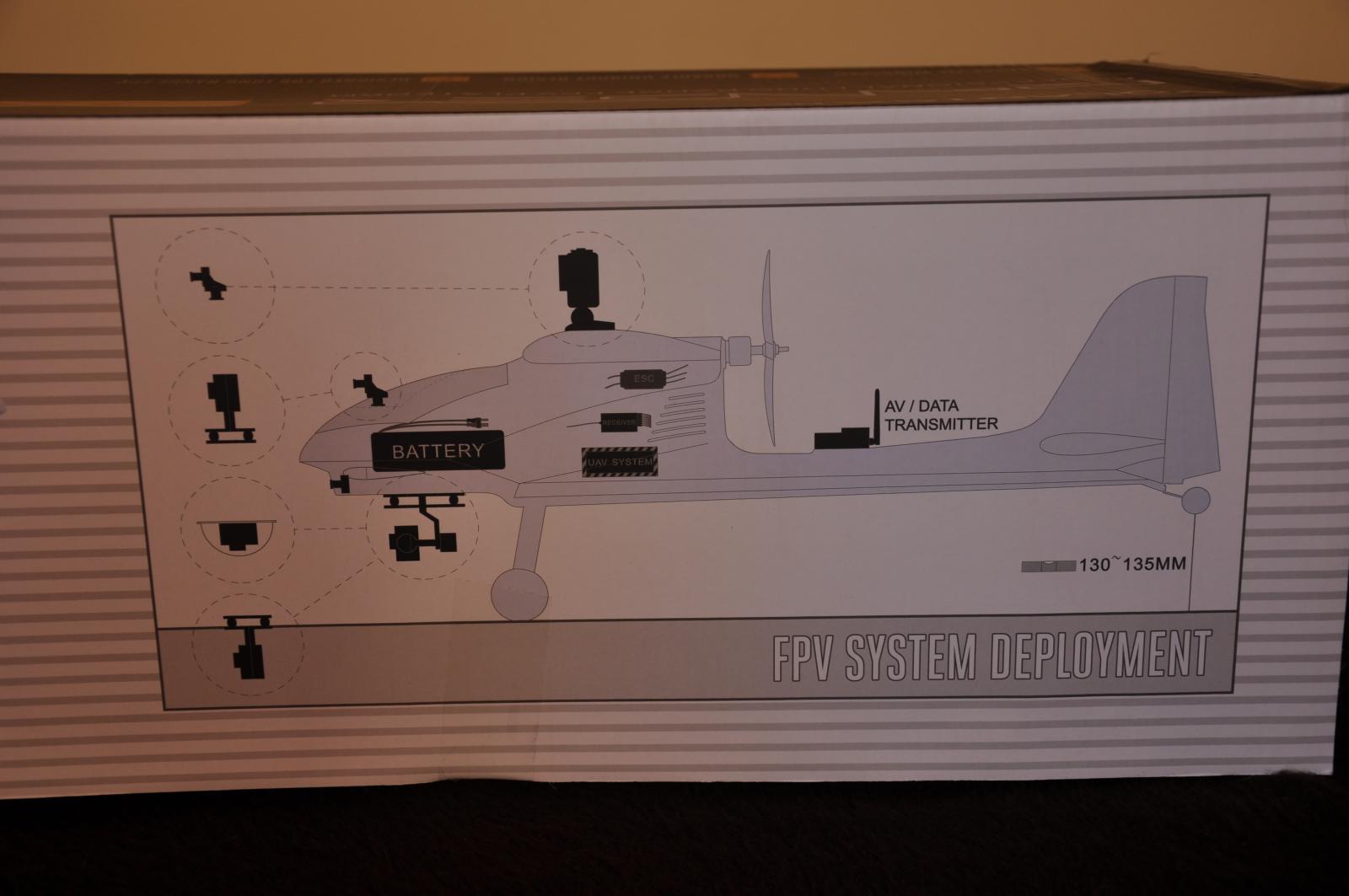
Wielkość wnętrza jest imponująca jak najbardziej. Mnie chodziło jednak o to że brak jest dedykowanych w modelu lokalizacji sprzętu FPV jak kamery, nadajnik FPV, czy odbiornik GPS. W Rangerze była cała seria sugerowanych miejsc mocowania takiego sprzętu. W dodatku szklana kabina w 2600 FPV jest już sklejona z podstawą, więc odpada mi mocowanie kamery filmowej w dogodnym miejscu tak jak to robi np. Kolega w swoim Pingwinie Ja dostałem już kadłub sklejony więc nawet nie wiedziałem o ukrytej wnęce a faktycznie jest spora: Szkoda że nie zrobiono do niej dostępu fabrycznego - np.wziernik z boku. Ostatecznie w moim modelu umieściłem odbiornik GPS o nadajnik FPV w kabinie. Co do umieszczenia nadajnika FPV (takie umieszczenie sugeruje producent) to mam wątpliwości czy nie za blisko odbiornika RC i czy pakiety nie będą zasłaniały sygnału gdy model jest zwrócony przodem do mnie. Najwyżej po próbach przeniosę ten nadajnik na ogon tak jak robi się to tradycyjnie.
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
A ciekawy jestem jak Macieju rozmieściłeś wyposażenie w swoim modelu ? Model jest duży i sporo miejsca w środku, ale pod wyposażenie FPV raczej słabo przygotowany -
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
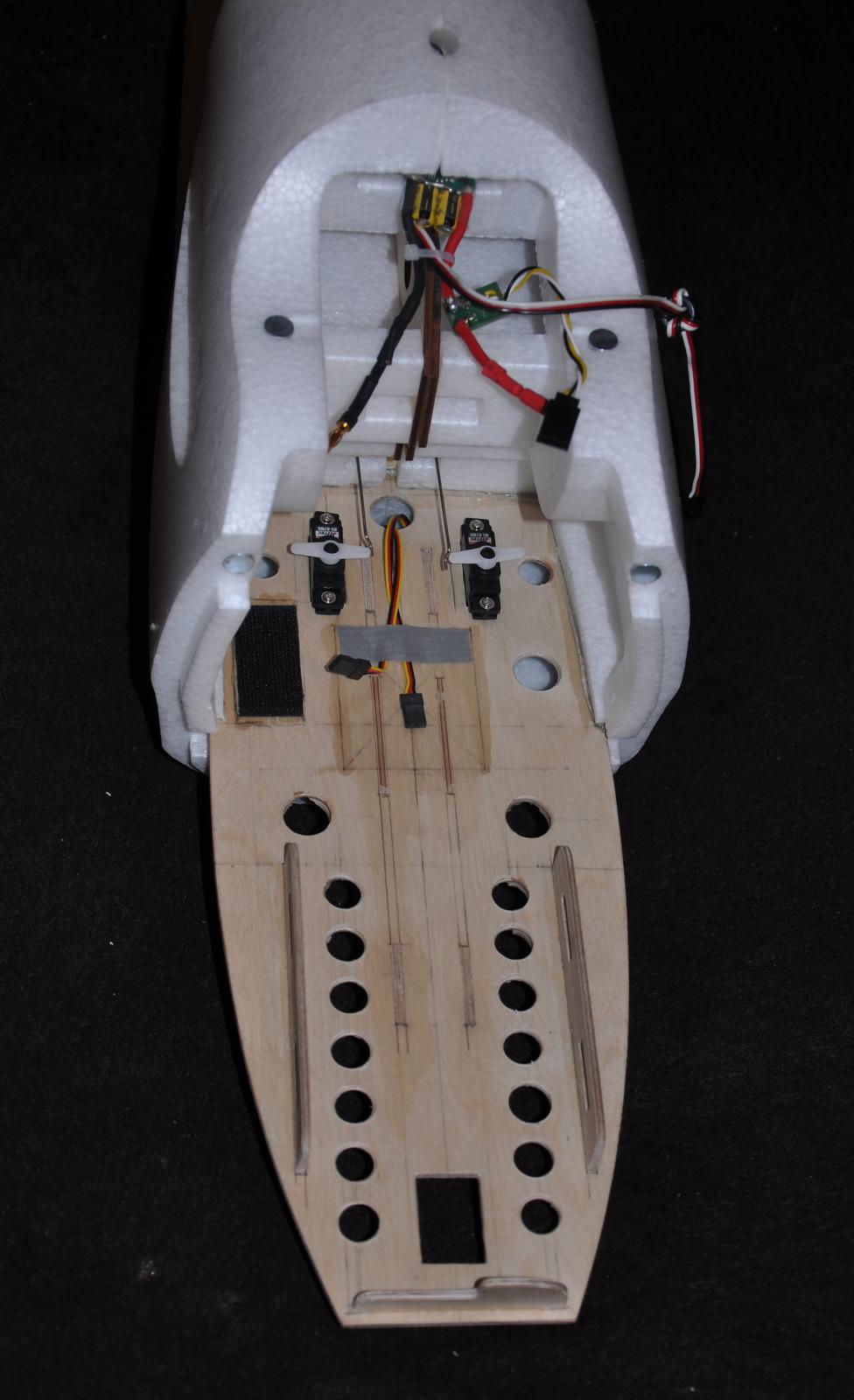
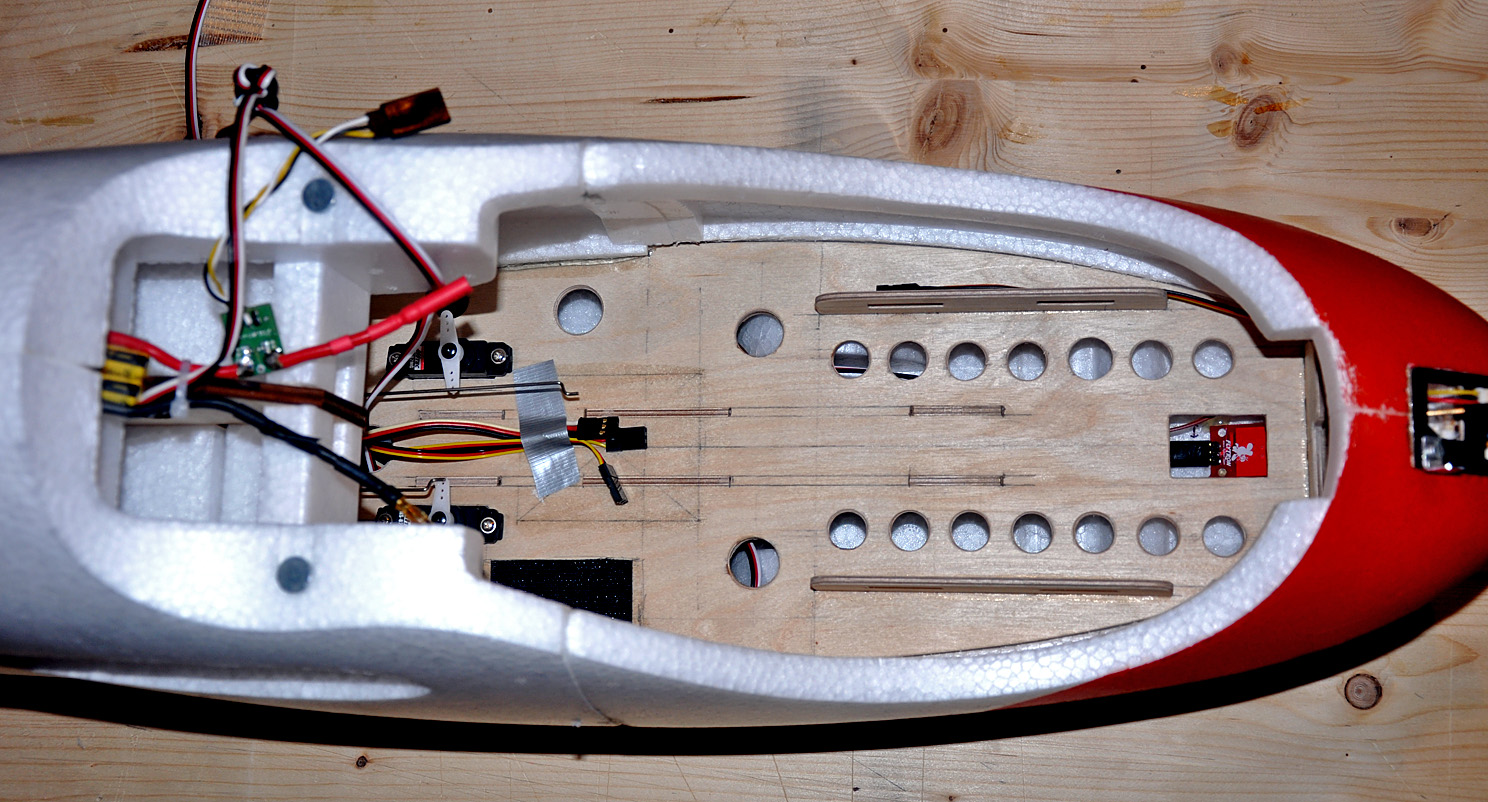
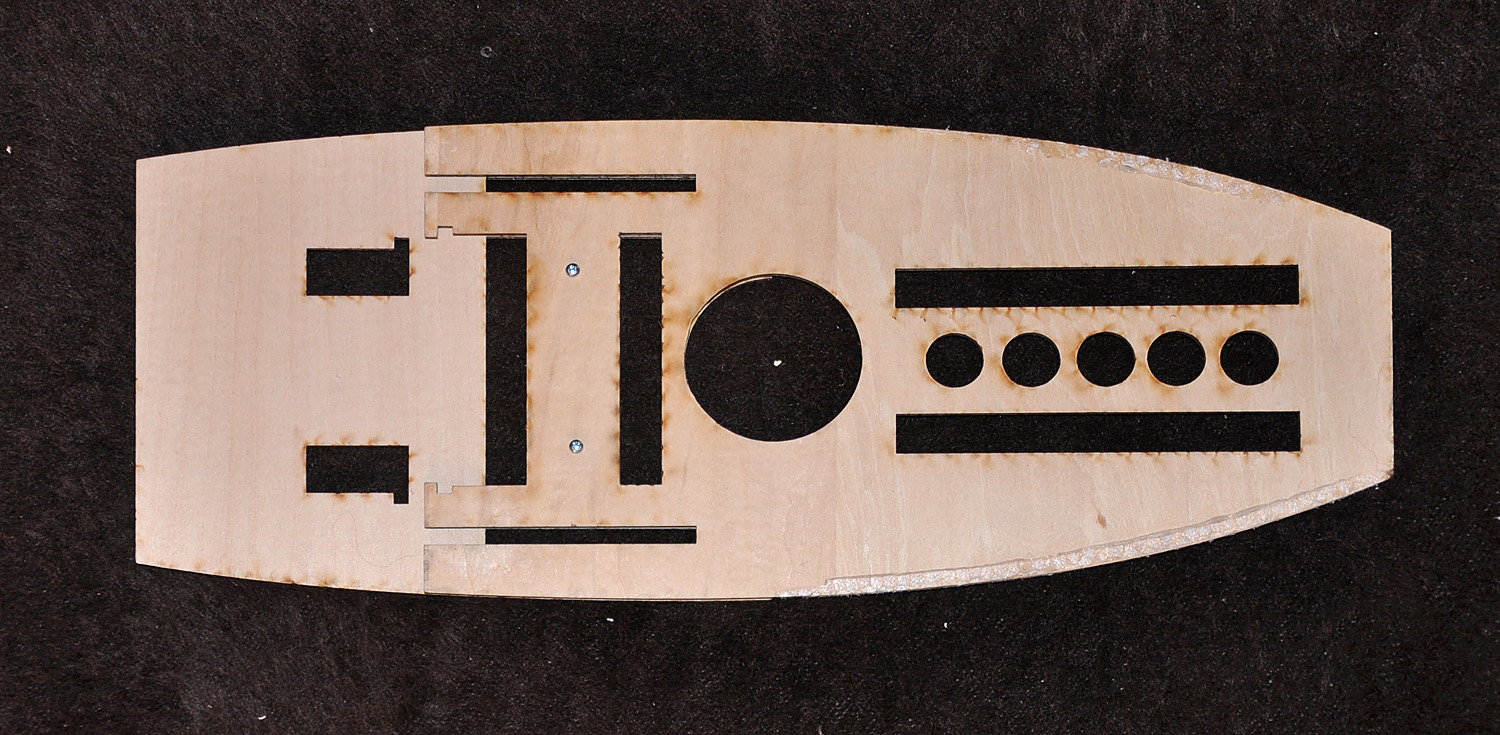
No to jest nas dwóch podobnie myślących. Co do zakłóceń kompasu w kontrolerze - to zakłócają nie tylko magnesy, ale biegnące niedaleko przewody prądowe do zasilania silnika. Dlatego w multikopterach montuje się magnetometr na maszcie jak najdalej od wszelakich pól magnetycznych. Z tego to powodu do odczytu kierunku lotu używam tylko orientacji GPS jest o wiele dokładniejsza - widać to wyraźnie na wykreślanej rzeczywistej trasie lotu modelu. A wracając do tematu - ja postanowiłem skleić na stałe obie części kadłuba, ale przedtem zrobiłem solidną podłogę ze sklejki lotniczej 3 mm. Mogłem od razu zaplanować odpowiednio otwory na kable, miejsca mocowania pakietów i kontrolera lotu. Podłoga otrzymała żebrowe wzmocnienia, oparła się pewnie na wnękach podwozia i stała się nośnym "kręgosłupem" całej przedniej części kadłuba. widok na żebrowe wzmocnienia podłogi w miejscu łączenia części kadłuba : podłoga wklejona w część stałą kadłuba ostatnia przymiarka przed sklejeniem kadłuba w całość Całość skleiłem sprawdzonym już w Rangerze klejem Sudal FIX. Klej ten daje mocną i jednocześnie elastyczna spoinę i nie potrzebuje do klejonych powierzchni dostępu powietrza. Przewody do sterowania pochyleniem kamery i zasilanie stroboskopu puściłem po podłogą.
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
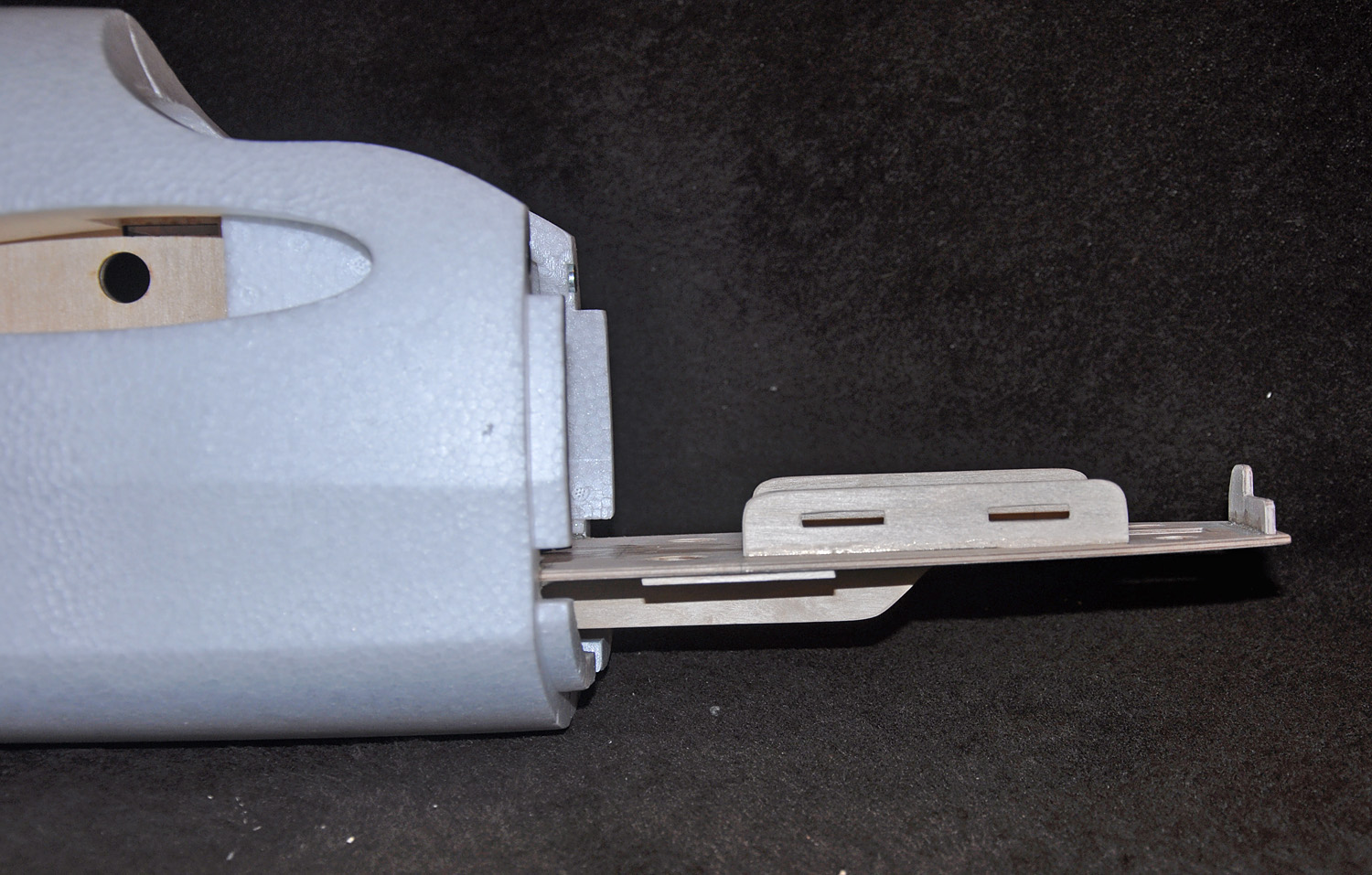
Konstrukcja kadłuba Model ma niespotykaną prze-zemnie do tej pory konstrukcję kadłuba. Jego przednia część z podwoziem jest osobną częścią modelu. Nie mogę dociec swoim ograniczonym rozumem co konstruktor modelu chciał przez to uzyskać. Łatwość wyczepiania przy upadku, uproszenie montażu wyposażenia, możliwość przedłużenia kadłuba, względy technologiczne formy w której wtryskuje się elementy modelu - no nie wiem co jeszcze może być powodem takiej konstrukcji. Przednia część z kadłubem kadłubem mocowana jest na magnesach (bardzo lichych zresztą i na pewno nie neodymowych) i nasuwana na sklejkową podłogę modelu aż do styku magnesów. Podłoga łączon jest także z dwu skręcanych kawałków i można ją w pewnym zakresie rozsuwać po co to - jest to dla mnie zagadką. Może Koledzy mają jakieś zdanie na ten temat ? podłoga modelu Przymierzając części kadłuba na sucho wsunąłem nieopatrznie podłogę w przednią część..... i nie mogłem już jej zdjąć. Szczeliny zostały fabrycznie posmarowane jakimś klejem i załapały podłogę na fest (na zdjęciu wyżej widać ślady fabrycznego kleju). Zabawa trwała godzinę ażeby nie niszcząc kształtki wyrwać z powrotem podłogę z przedniej części. Podłoga wykonana jest ze sklejki liściastej ułożonej słojami w poprzek modelu. Więc kiedy model ląduje na kołach siła z kół przenosi się przednią część kadłuba potem na magnesy a gdy te puszczą na sklejkową podłogę w niewłaściwymi z powodów wytrzymałościowych ułożonymi słojami. Jeżeli części kadłuba skleimy i wkleimy podłogę sytuacja się poprawi, ale liściasta sklejka będzie dalej słabym punktem a kadłub może się rozrywać w miejscu łączenia.
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
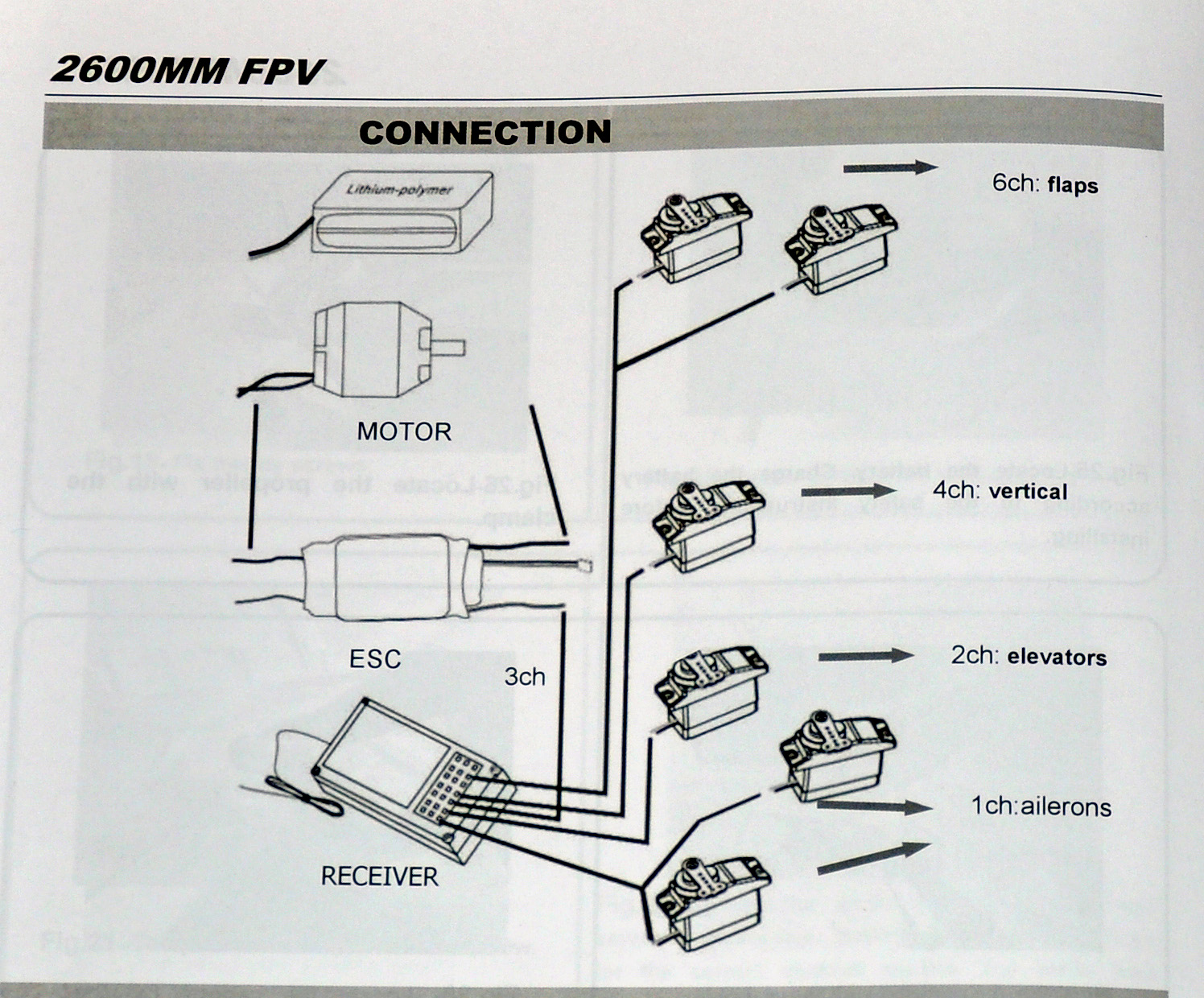
Przyporządkowanie kanałów: Instrukcja modelu podaje typowe przyporządkowanie kanałów Kan 1 lotki na przewodzie "Y" Kan 2 ster wysokości Kan 3 obroty silnika Kan 4 ster kierunku Kan 5 przełącznik trybu lotu trój-stanowy Man/Stab/Auto - dla Pitlab Kan 6 klapy na przewodzie "Y" - jedno serwo z modułem rewersu Kan 7 menu przełącznik trój-stanowy OSD - dla Pitlab Więc potrzebujemy miń 7 kanałów w swoim radiu. W dodatku nasz system RC musi obsługiwać funkcję FailSafe na kanale 3 i 5. Jeżeli nie używamy modułu autopilota kanały 5 i 7 pozostają wolne i nie ma też wymogu funkcji FailSafe - ale latamy wtedy jak zwykłym motoszybowcem. Ponieważ posiadam radio wielokanałowe Futaba 14 SG mogłem sobie trochę poszaleć i przyporządkowałem kanały następująco: Kan 1 lotka 1 Kan 2 ster wysokości Kan 3 obroty silnika Kan 4 ster kierunku Kan 5 przełącznik trój-stanowy trybu lotu Man/Stab/Auto - dla Pitlab Kan 6 lotka 2 Kan 7 przełącznik trój-stanowy OSD Menu - dla Pitlab kan 8 klapa 1 kan 9 klapa 2 kan 10 pochylenie kamery kan 11 stroboskop -
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Zawiasy Podobnie jak w Rangerze EX zawiasy wykonane są jako przetłoczenia. Zawiasy w 2600 FPV są wykonane lepiej tzn. lżej chodzą, ale mimo wszystko dla małych serw HS 82MG stanowią niepotrzebne obciążenie. Dlatego zostawiłem oryginalne zawiasy na SK i klapach, natomiast lotki i SW wyposażyłem w zawiasy kołkowe. Jeżeli przy pełnym wychyleniu płaszczyzny sterowej serwo milczy (nie bzyczy) jest ok. zawiasy lotek zawiasy SW
-
Prząśniczka J1-M EP 2.0m - temat zakończony
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Z elektroniki po Prząśniczce powstaje nowy model - Powerzone 2600 FPV zainteresowanych opisem zapraszam tutaj: http://pfmrc.eu/index.php?/forum/49-platforma-nasze-konstrukcje/
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
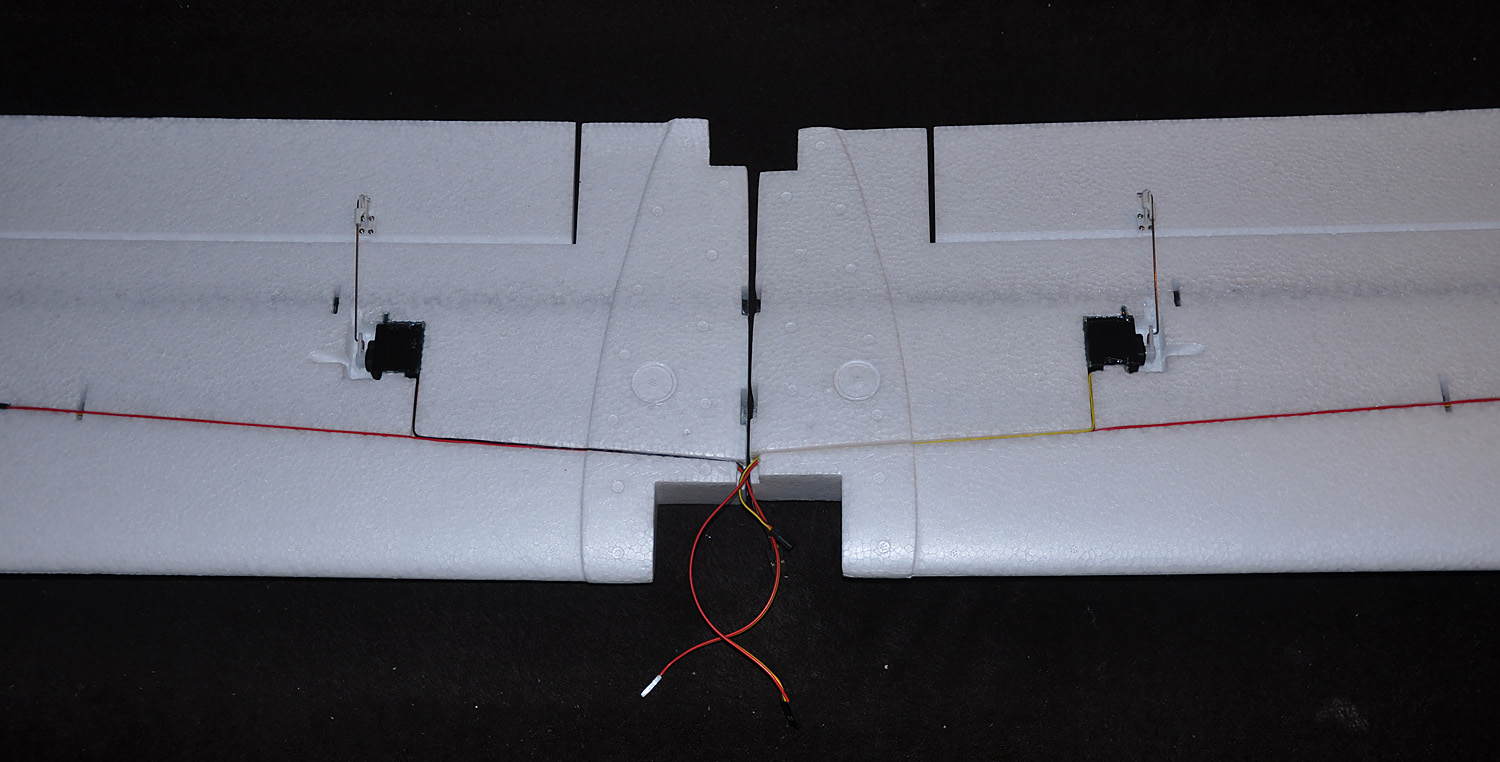
W instrukcji przedstawiono sposób podłączenia poszczególnych kanałów do odbiornika RC. Zwróciłem uwagę na łączenie kalp. Wg instrukcji klapy łączone są (podobnie jak i lotki) równolegle tzw kablem "Y" . Takie łączenie powoduje, że serwa pracują we wspólnym kierunku. W lotkach serwa są montowane w odbiciu lustrzanym i takie łączenie zda egzamin i mino równoległego podłączenia serw, lotki będą się wychylały w przeciwne strony. W klapach mocowanie serw nie powinno być w lustrzanym odbiciu, tylko w takim samym położeniu lewa jak i prawa połówka skrzydła. Niestety producent "Powerzone" zrobił mocowanie serw dla klap również lustrzane. Co ciekawe w Rangerze EX tego błędu nie było. Mocowanie serw klap w odbiciu lustrzanym: Pozostaje więc, albo sterować kalpy z osobnych kanałów, albo zastosować na jednej klapie moduł elektroniczny zapewniający rewers jednego serwa.
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Oczywiście że też tak można. Jednak ruch kamery na boki daje widzenie z modelu niezgodnie z kierunkiem jego lotu, a dla mnie jest ważne co znajduje się bezpośrednio przede mną. Ale może kiedyś do tego dojrzeję - ale chyba nie na razie . Poza tym pantilt zabiera sporo miejsca, którego w tym modelu mimo że taki duży na wyposażenie FPV nie jest za wiele bo kabina została fabrycznie szczelinie zamknięta. Ale o tym innym razem. Natomiast pochylenie kamery jest o tyle ważne, że wraz z wysokością lotu zmienia się obszar obserwowany przez kamerę - regulacja pochylenia daje możliwość obserwacji tego samego obszaru np. punktu do którego się zbliżam. -
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
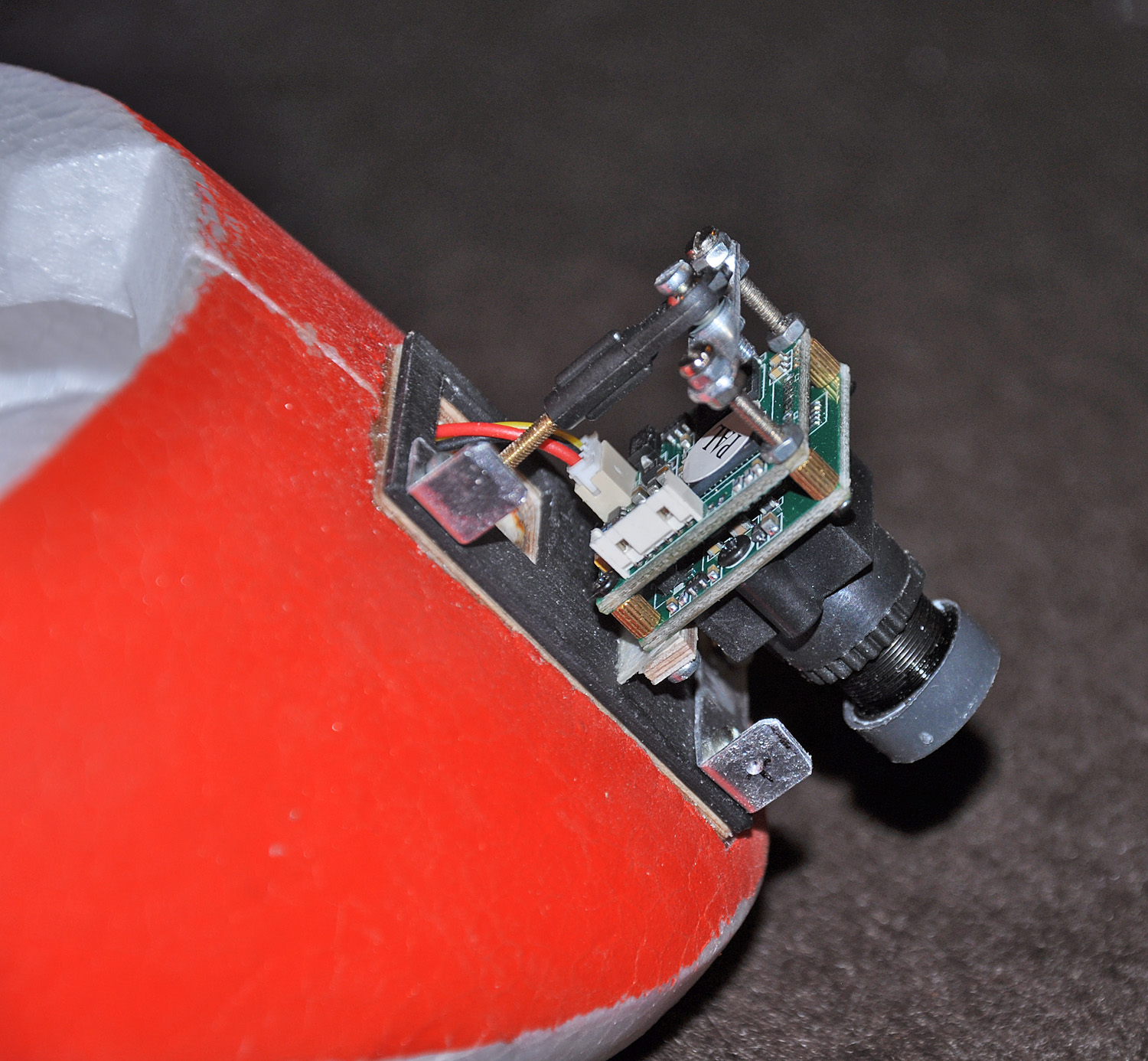
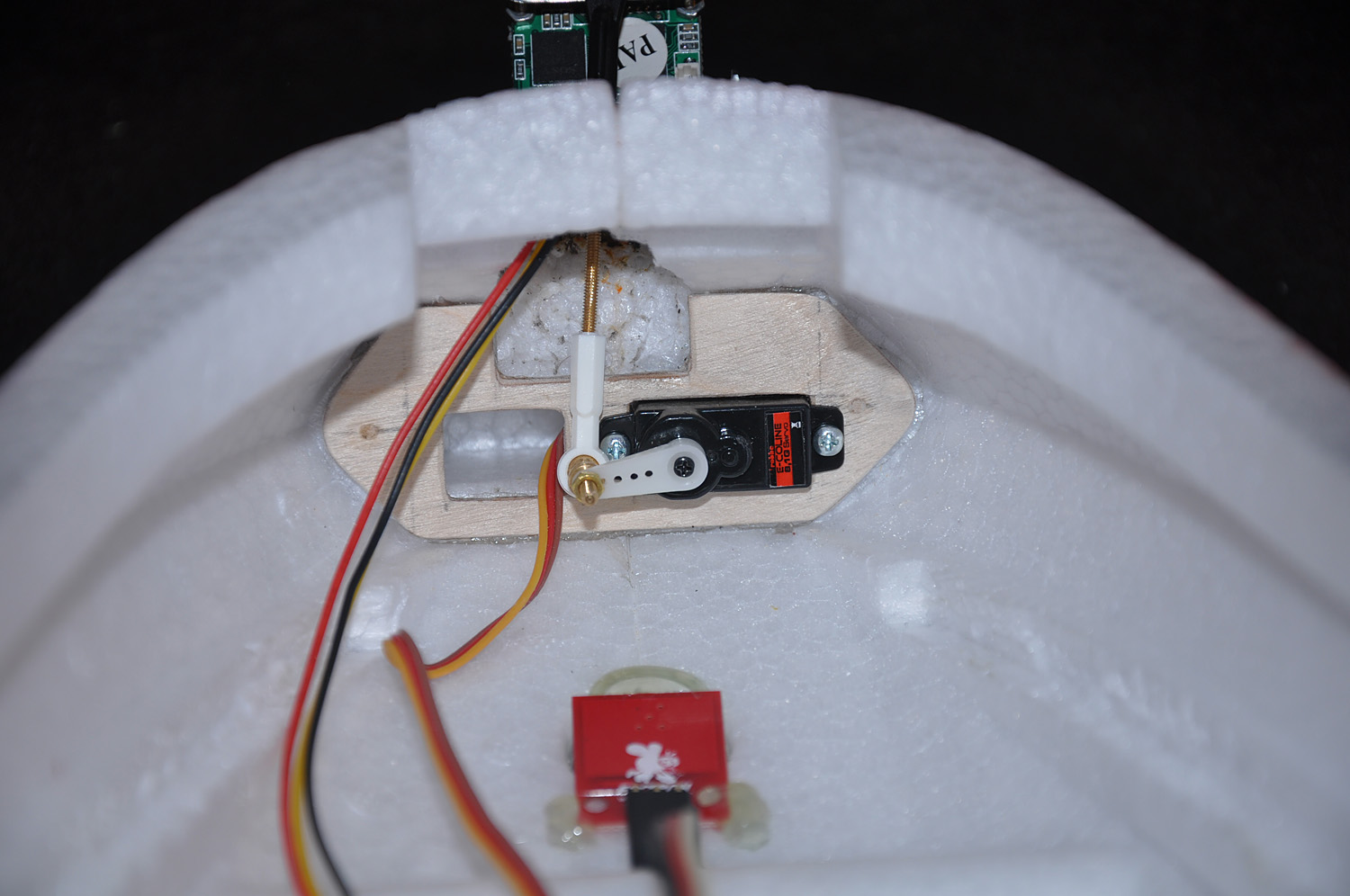
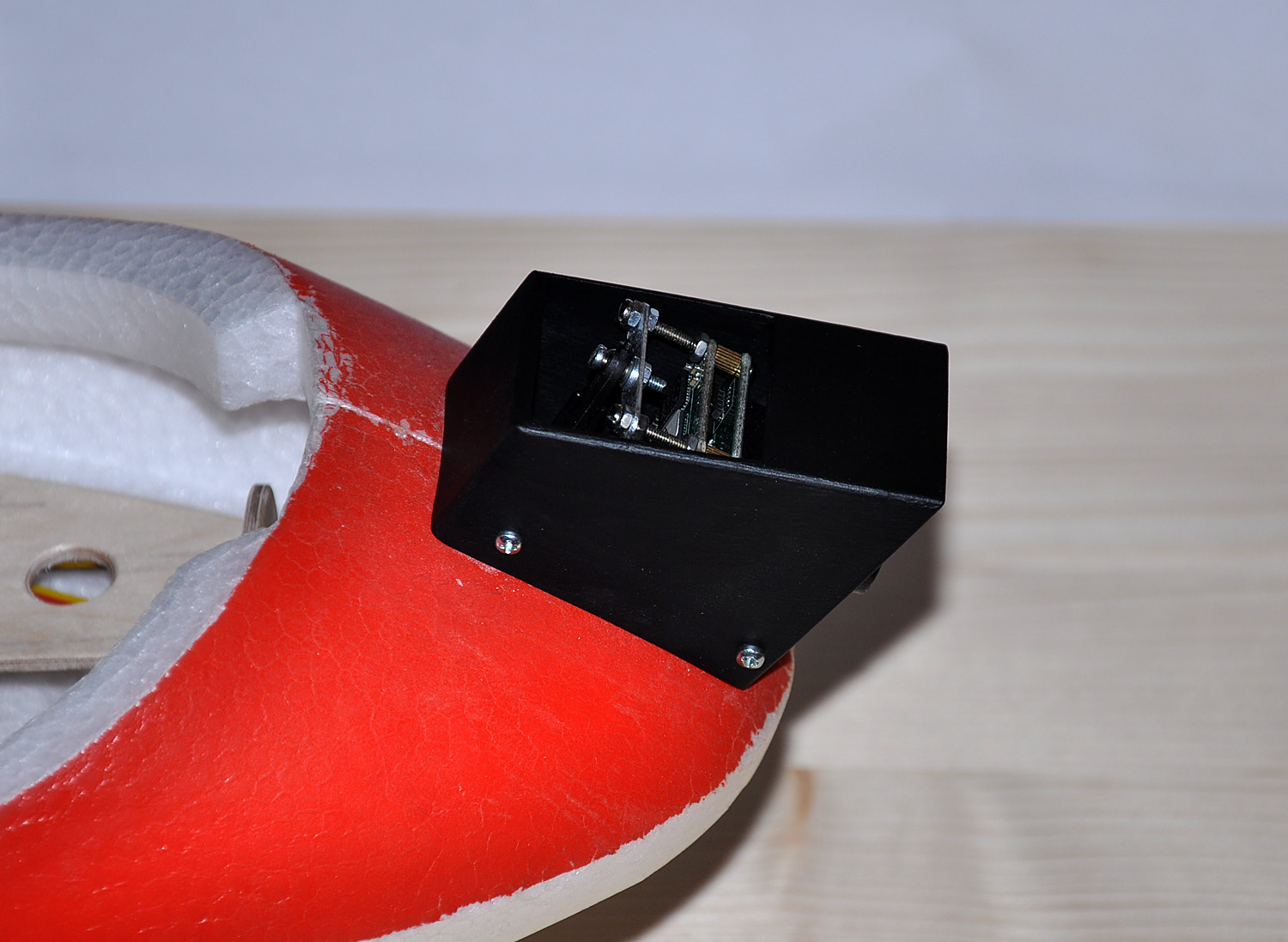
Kamera FPV Jako kamery użyłem mojej ulubionej Kamery płytkowej Sony Effio 700TVL HD ( http://abc-rc.pl/kamera-plytkowa-sony-effio-700tvl-hd ). Dlaczego ulubionej ? - sprawdziła mi się w poprzednim modelu Ranger EX jest niewielkich wymiarów i łatwa do montażu. W dodatku dobrze pracuje w kiepskim oświetleniu. Jakość/cena w/g mnie do zaakceptowania. W tym modelu postanowiłem zastosować kamerę pochylaną drogą RC. Trochę zabawy z tym było, ale wyszło chyba nie najgorzej. Mocowanie kamery na nosie modelu napęd pochylenia kamery i maksymalne pochylenia kamera w osłonie przeciw-słonecznej i jako zabezpieczenie od drobnych uderzeń:
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Tak, ja mam wszystkie pakiety napędowe zoptymalizowane i wszystkie są 4S. W modelu będzie latał cały czas 4S 5300 mAh - ew. doważenie zrobi większy lub mniejszy pakiet FPV. Natomiast kamera główna do filmowania Sony, Mobius czy nawet może kiedyś gimbal, będą na konstrukcji umocowanej nad środkiem ciężkości modelu, więc obojętne czy model latać będzie z kamerą czy bez niej. -
Powstaje mój nowy model - Powerzone 2600 FPV na opis zapraszam tutaj: http://pfmrc.eu/index.php?/forum/49-platforma-nasze-konstrukcje/
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Powstaje mój nowy model - Powerzone 2600 FPV na opis zapraszam tutaj: http://pfmrc.eu/index.php?/forum/49-platforma-nasze-konstrukcje/
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Na to liczę, bo nie chciałbym 2,6 m modelem machać ręką - nawet tylko z samego lenistwa. No to to sprawa pierwsza: Model jest smukły czyli ma długi kadłub - to dobrze powinien być stateczny w poziomie. Kadłub w części za silnikiem jest płaski i szeroki. Jak zacząłem badać jego sztywność - no cóż sam styropian . Co prawda przez środek kadłuba w dolnej jego części idzie wzmocnienie w postaci cienkiej rurki węglowej, ale to przy tej wielkości modelu jest to raczej wzmocnienie teoretyczne i myślę że kiepsko wklejone. Lekki nacisk na belkę ogonową i zmienia się geometria kadłuba a wraz z nią kąt zaklinowania SW. Dlatego na górze belki ogonowej przykleiłem listwę węglową 2x10 mm a dół kadłuba, tam gdzie jest rurka węglowa nastrzyknąłem w kilkunastu miejscach rzadkim cjakiem (żeby rurka związała się mocniej z konstrukcją styropianową). Efekt okazał się bardzo pozytywny.
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek odpowiedział(a) na Pioterek temat w Platforma - nasze konstrukcje
Również witam A tu film bez gimbala z mojego Rangera EX - kamera Mobius Mój model, ostatnią sztukę kupiłem w ModelMotor https://www.modelmotor.pl/2600-fpv.html. Mam lotnisko równe trawiaste, więc liczę że podwozie mimo że skromne pozwoli mi na startowanie modelem z ziemi. Mój Kolega lata podobnym mniejszym modelem Pingwin i startuje z ziemi Wyważenie modelu sprawdzam przy budowie na bieżąco przy obecnych pakietach wygląda że będzie ok. Drugie wrażenie - jednak trochę roboty będzie ............powoli się rozkręcam
-
2600 FPV Powerzone + Pitlab&Zbig Autopilot z OSD
Pioterek opublikował(a) temat w Platforma - nasze konstrukcje
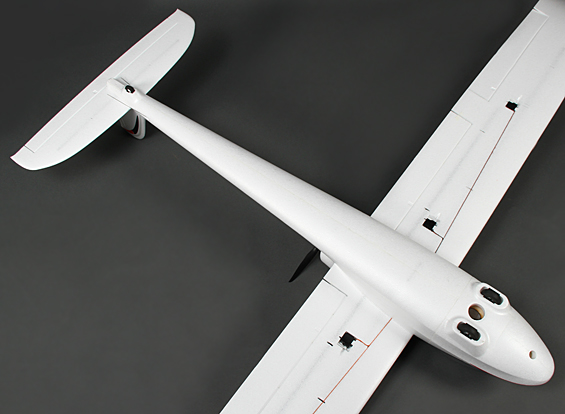
Będzie to relacja z budowy i lotów modelu ilustrowana bogato zdjęciami i filmami. Znajdą się też nawiązania i porównania z do poprzedniego mojego modelu FPV Ranger EX. A więc zapraszam: No i stałem się posiadaczem styropianowego kolosa - modelu 2600 FPV firmy Powerzone w wersji KIT czyli tzw "golas". Pudło przyszło kurierem spore i model po rozłożeniu do sprawdzenia też ledwo mieści się na podłodze pokoju. Pierwsze wrażenie - model ładnie wykonany z materiału dającego kleić się cjakiem. Wnętrze obszerne z wygodnym dostępem do elektroniki. Model posiada dwie wersje stateczników z SW na dole i Sw mocowanym na górze na sterze kierunku. To drugie rozwiązanie jest wygodne jeżeli nasze lotnisko ma trochę wyższą trawę. Ale za to wadą tego usterzenia jest mniejsza sztywność. Skrzydła posiadają po dwa długie węglowe bagnety mocowanie w wklejonych węglowych pochwach. Dopiero po pół godzinie usilnych starań i "wecowania" udało mi się wsunąć bagnety na żądaną głębokość. Musiałem posłużyć się rzadkim olejem teflonowym (taki do konserwacji łańcuchów rowerowych) żeby bagnety zaczęły się w miarę lekko wsuwać. Model posiada szczątkowe trókołowe podwozie które ułatwia start modelu w miarę płaskiej powierzchni. Skrzydła modelu maja klapy. Do napędu wszystkich powierzchni sterowych wystarczy jeden typ serwa - w moim przypadku wybrałem serwa HS 82MG - 6 szt.. W zestawie otrzymujemy śmigło 10x5, ale równie dobrze dobierając inny silnik można zastosować śmigło 11x5. Silnik rekomendowany to D3542 1200KV i pakiet 3S 5000mAh ze śmigłem 10x5 i 50A ESC Silnik dobrany przeze mnie to EMAX GT2820/06 985 KV i pakiet 4S 5300 mAh ze śmigłem XOAR 11x5 (max do 11x7) i 60A ESC cdn
-
Prząśniczka J1-M EP 2.0m - temat zakończony
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Masz rację - odpowiedź na PW. -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Fakt, tym bardziej że nie miałem Bartka obok -
Prząśniczka J1-M EP 2.0m - temat zakończony
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Chciałbym maksymalnie wykorzystać elektronikę z Prząśniczki i ten model mi jeżeli chodzi o pakiety napęd itd... mi pasuje. Namawiam też trochę Pana Jarka Suchockiego na model konstrukcyjny FPV i być może taki przez zimę powstanie. Więc teraz raczej szukam przejściowego gotowca. W zasadzie do podglądu i filmowania może być dowolny model FPV byle by statecznie latał. Pianka ma też tę zaletę, że dobrze tłumi drgania napędu. -
Prząśniczka J1-M EP 2.0m - temat zakończony
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
"Lepsze bywa często wrogiem dobrego" - i sprawdziło się. Z żalem zawiadamiam, że moja Prząśniczka J1M poległa wczoraj podczas kolejnej sesji na lotnisku. W ostatnim tego dnia locie i przed ostatnim zakrętem do lądowania lecąc na stabilizacji przeciągnęła i upadła na ziemie. Udało mi się tylko spowodować to, że upadła płasko na brzuch. Elektronika nieuszkodzona, natomiast kadłub modelu pod wpływem ciężaru pakietu przełamał się w najsłabszym miejscu. Modelu nie mam zamiaru naprawiać - po prostu nie chcę tracić na to czasu. Uszkodzony model zabrał towarzyszący mi akurat Pietka - może coś będzie z nim dalej robił - to już jego własność. Powiem szerze, że nie dażyłem tego modelu specjalną egzaltacją był tak samo ładny co kłopotliwy w lataniu - takie specyficzne przeciwieństwo. Ja podziwiałem jej piękną linię a Ona łaskawie pozwalała się prowadzić w powietrzu a nawet wykręcić akrobację. Widać nie spodobała się nowa rola jaką jej chciałem wyznaczyć. Może coś kończy się po to, żeby mogło się zacząć nowe. Całe wyposażenie FPV i napędy pozostały przecież do dyspozycji. Poszukiwania nowego modelu trwają 2600 FPV 2,6 m i też startuje z ziemi
-
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Na naszym forum oprócz znawców tematów wszelakich są i Koledzy, którzy uważnie czytają i rozwijają chętnie swoje umiejętności. I właśnie dla nich staram się co jakiś czas coś napisać, bo dla wszystko wiedzących nie ma już potrzeby. Piszę tylko to czego sam doświadczyłem praktycznie lub zrobiłem. Ranger w mojej skromnej ocenie (a mam parę innych modeli do porównania) lata bardzo dobrze, choć trzeba było go trochę do tego przygotować. Model FPV musi sam z siebie dobrze latać ponieważ niesie drogie wyposażenie a w locie autonomicznym "jest sam sobie sterem i żeglarzem". Jak chcesz Bartku spróbować to wyłącz lotki w swoim Korsarzu i zobaczysz jak daleko nim polecisz. Awaria serwa choć rzadka jest możliwa i są opisy na forum takich sytuacji. Co do pogody, dobrze poznałem swój model i wiem jaki wiatr jest dla niego dozwolony. I powiem każdy z jakim się do tej pory zetknąłem. Dobrze obrazuje to nawet film z oblotu modelu. Ale ktoś kto rozpoczyna latanie FPV z nowym modelem nie musi o tym wiedzieć i dla niego jest ta uwaga, ażeby model i jego możliwości najpierw dobrze sprawdzić. Pozdrawiam Pioterek -
Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
Pioterek odpowiedział(a) na Pioterek temat w Konwersje spalin na elektryki i elektryczne "giganty"
Masz jak najbardziej rację - wymierzyłem nawet sobie sam karę i nie zjadłem tego dnia deseru. A na bardziej poważnie, brak podłączenia lotek widać było zaraz po starcie więc i moja reakcja była szybka - lądować. Zawsze sprawdzam stery przed startem, ale kiedyś zdarzył się ten pierwszy raz. I dlatego byłem wdzięczny modelowi, że to wytrzymał i uważam to za jego dużą zaletę. Padnie serwo lotki - model wytrzyma. Sprawdzenie sterów to dopiero pierwszy krok przed startem z FPV. Będąc w powietrzu trzeba zrobić kółko testowe, włączyć na chwilę i sprawdzić trzymanie kursu i wysokości, sprawdzić działanie funkcji powrotu do Bazy, zorientować się czy model wróci pod wiatr jeżeli wieje silny. Nie zrobienie tego to możliwe konsekwencje o których piszesz. Potem dopiero można polecieć po trasie - w zasięgu wzroku oczywiście. Piszę jak jest - nie z samych sukcesów zbudowane jest moje latanie.