






Ryszard_I
-
Postów
575 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Odpowiedzi opublikowane przez Ryszard_I
-
-
Tak to jest jak się chodzi w krzaki
") .
.
-
 1
1
-
-
Programowanie za pomocą BLHeli32 Suite więc hamulec powinien być programowalny. Z powodzeniem przerabiałem kopterowe regulatory BLHeli do zastosowań w motoszybowcu. Programator robiłem na arduino pro mini. Bardziej mnie martwi informacja, że nie ma możliwości ustawienia soft startu co dla napędu z przekładnią jest wymagane. Można co prawda to obejść za pomocą delay w nadajniku. Proponuję Ci pogrzebać jeszcze w tym temacie w sieci. Mam nadzieję, że coś znajdziesz. Jest manual https://www.frsky-rc.com/wp-content/uploads/Downloads/Manual/Neuron/ESC Neuron 40 60 80 -Manual.pdf i widać, że hamulec jest programowalny. Jeszcze jeden link https://www.sgm.siedlce.pl/index.php/warsztat/wyposazenie/682-blheli-linker .
-
Tutaj masz garstkę informacji https://www.heli-team.pl/forum/viewtopic.php?t=10640
-
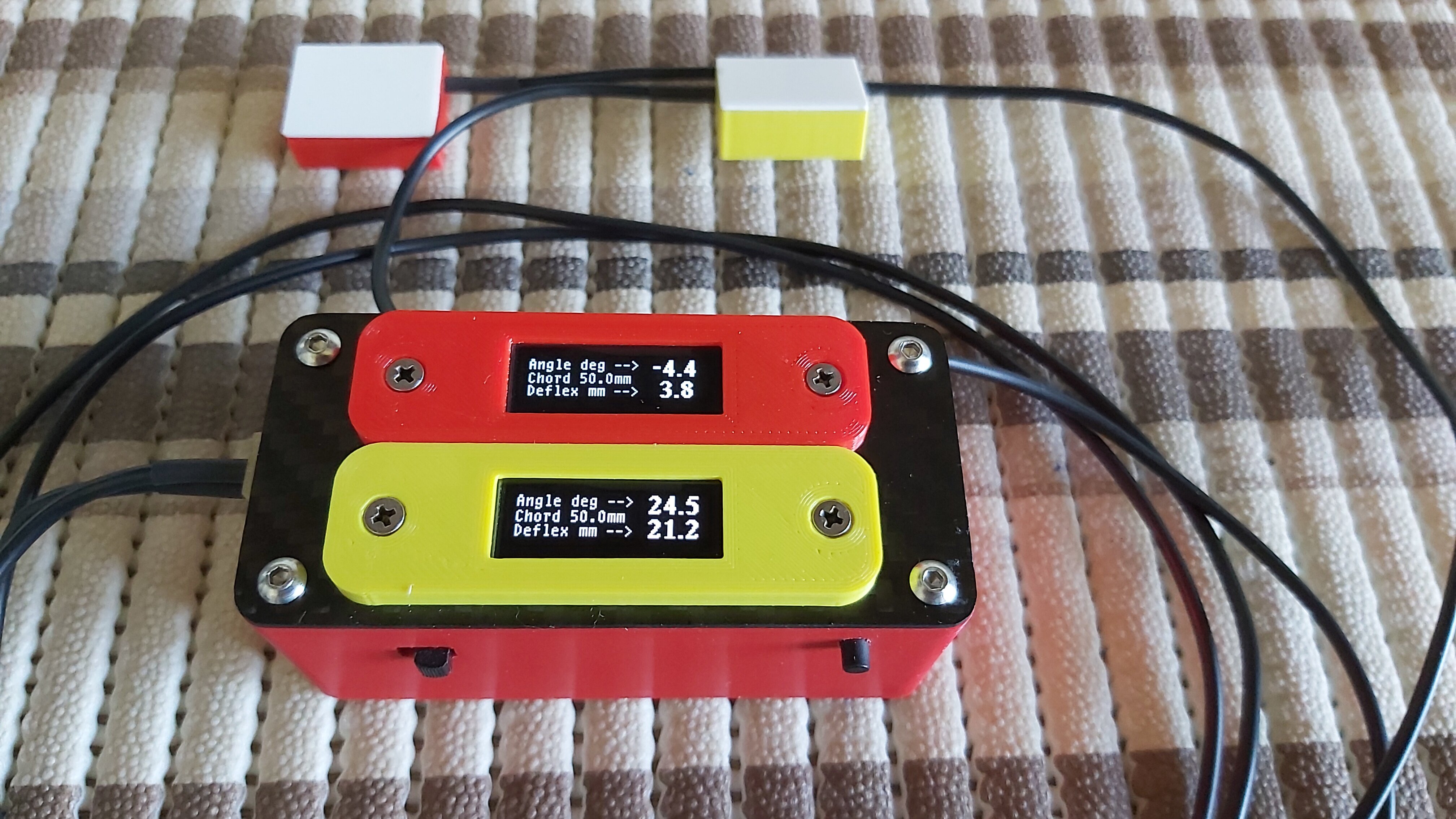
f5mmx jest twórcą wielu ciekawych projektów mających zastosowanie w modelarstwie. Bardzo chętnie korzystam z jego pomysłów i wiedzy. Właśnie w tej chwili strugam jego pomysł na gadget do pomiarów kąta i wychyleń sterów z akcelerometrem MMA8452. Jak wystrugam dam znać
. Gotowe.
Tryb pomiaru wychylenia w mm i kąta w stopniach.
 .
.
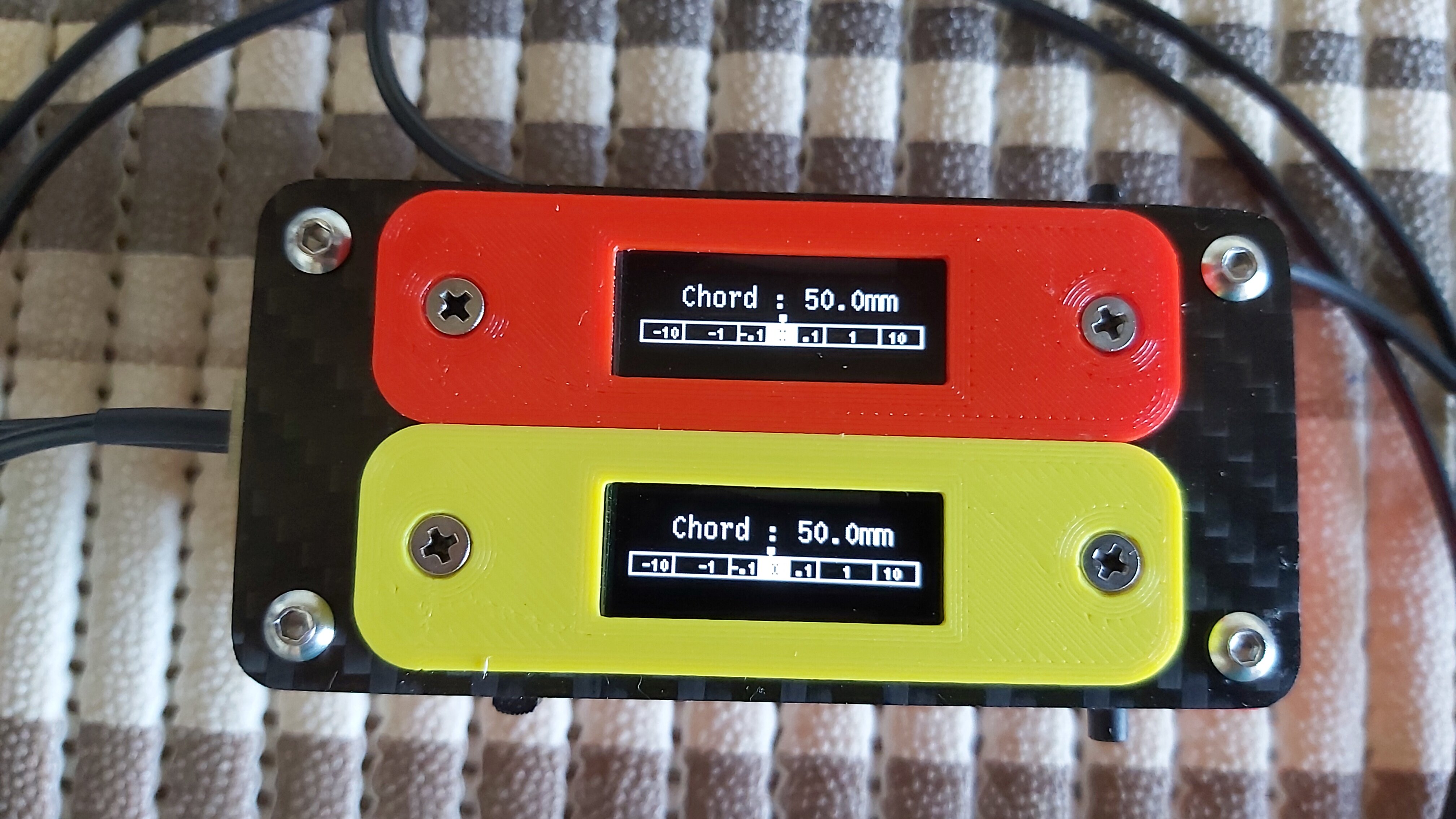
Tryb wpisywania cięciwy. Ciekawe rozwiązanie ponieważ wpisanie cięciwy polega na przechyleniu czujnika w jedną lub drugą stronę tak aby znacznik znalazł się nad odpowiednim rzędem jednostek ze znakiem plus lub minus a są trzy rzędy, 0.1 , 1.0 , 10. Gdy znacznik znajdzie się np. nad 10 to sukcesywnie dodaje do cięciwy 10mm. Dzięki takiemu rozwiązaniu obsługa przyrządu odbywa się jednym przyciskiem który służy do zerowania czujnika i po dłuższym przytrzymaniu do wejścia w tryb wpisywania cięciwy.
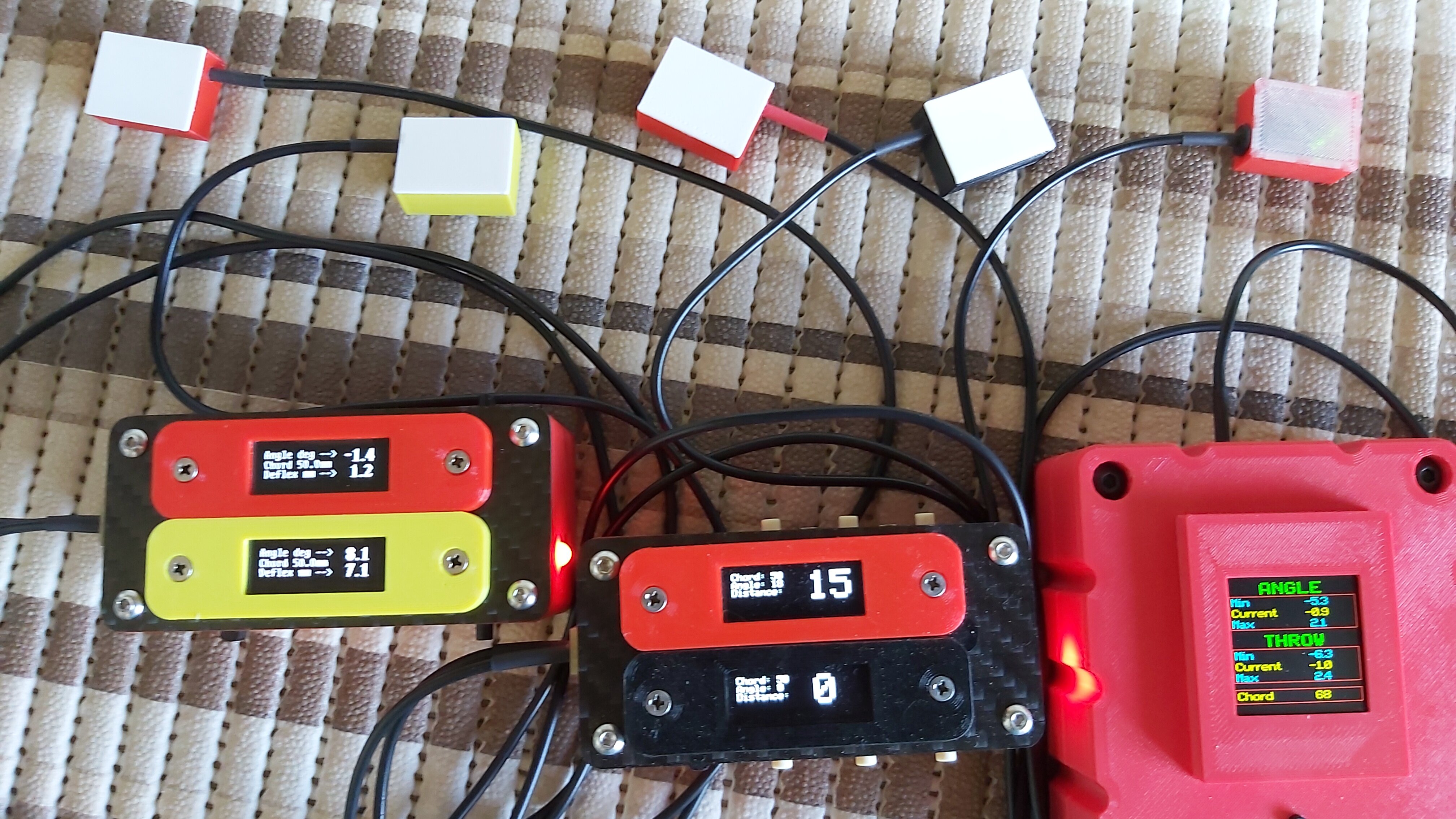
Pierwszy z lewej zbudowany na akcelerometrze MMA8452, drugi na ADXL345 i ostatni na MPU6050.
-
-
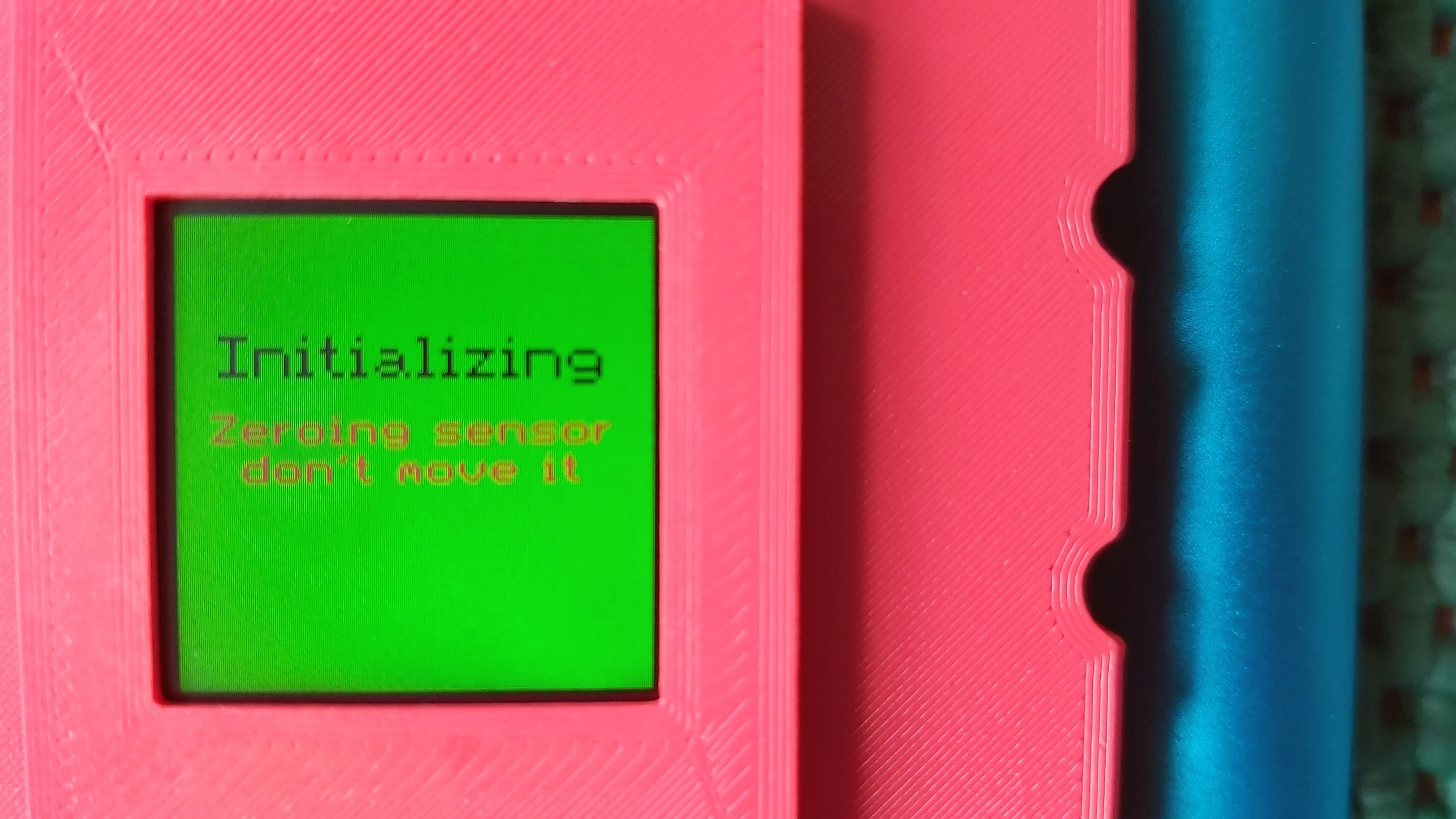
Na githubie wynalazłem któryś tam z kolei gadget do pomiaru kątów i zakresu wychyleń. Zbudowany z arduino uno bo taki miałem w przydasiach ale może być nano co korzystnie wpłynie na wymiary pudełka. Wyświetlacz IPS 240x240 na ST7789, akcelerometr MPU6050. Pokleiłem do kupy i działa
.
Kalibracja MPU6050.
Zerowanie MPU6050.
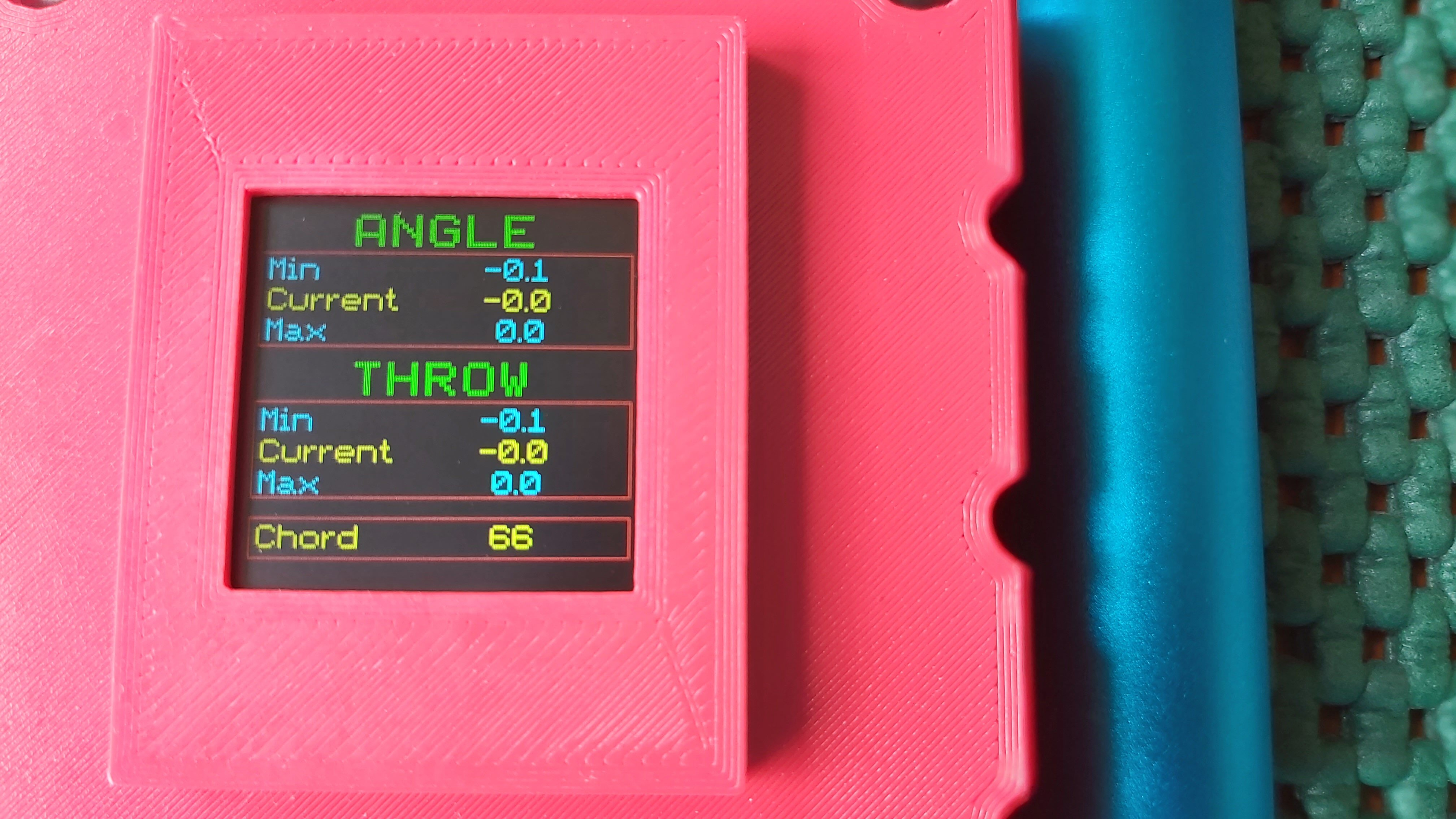
Po wyzerowaniu z wpisaną cięciwą 66mm.
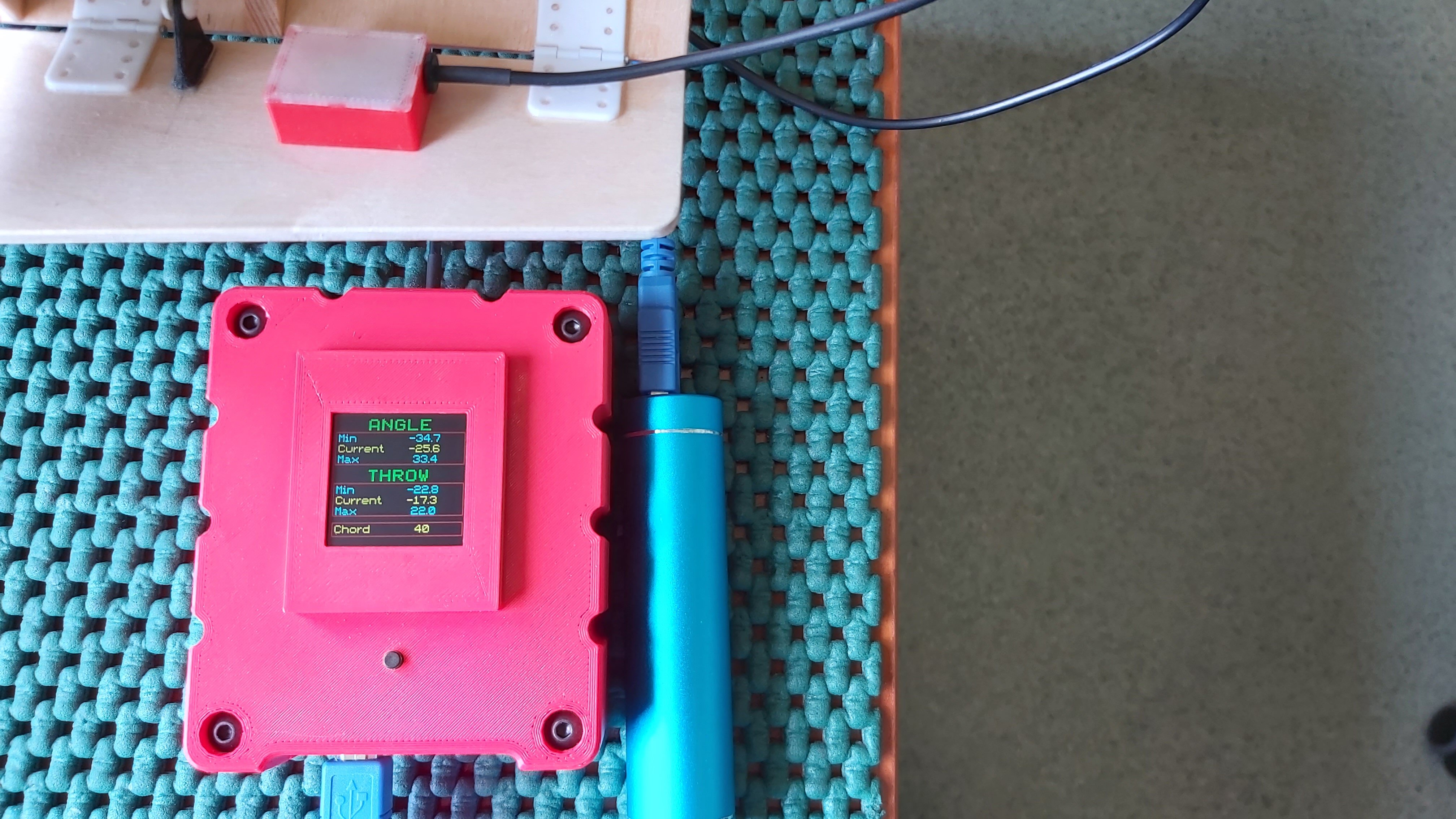
Pomiar. Widoczny czujnik MPU6050 i powerbank z którego zasilany jest gadget.
-
2
-
-
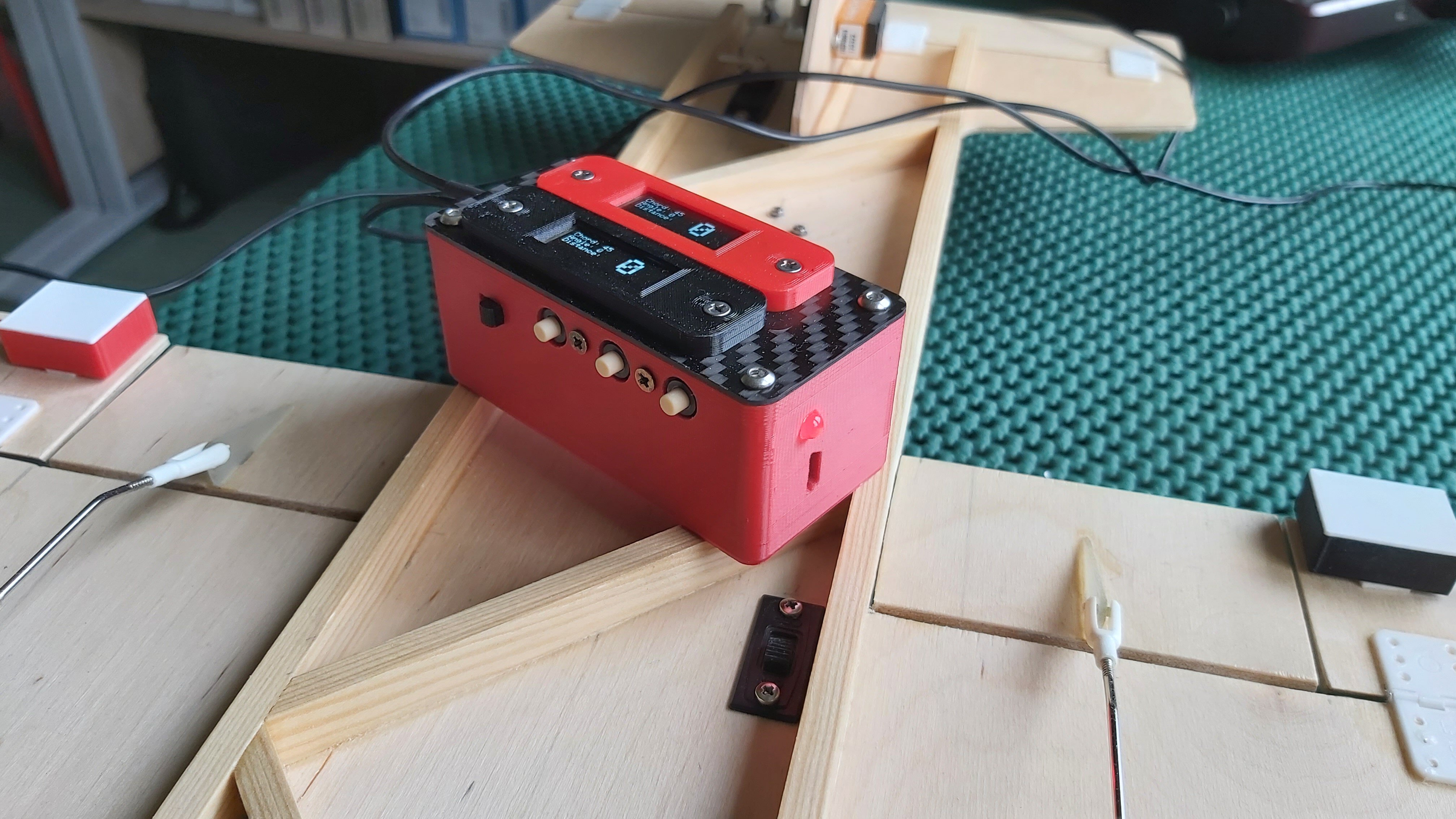
Wypatrzyłem na githubie i wystrugałem prosty przyrządzik do pomiaru wychyleń powierzchni sterowych w mm i stopniach jednocześnie z możliwością wyświetlenia powiększonych cyfr czy to mm czy stopni. Przyrząd posiada możliwość wpisania cięciwy. Dla wygody użytkowania wsadziłem do jednego pudełka dwa przyrządy i zasiliłem z wbudowanego ogniwa LiIon z możliwością ładowania z USB. Przyrząd zbudowany na modułach arduino nano oraz akcelerometrach ADXL345.
Wyniki pomiarów na OLED w czerwonej ramce pochodzą z czujnika w czerwonej obudowie a w czarnej ramce z czujnika w czarnej obudowie.
-
1
-
-
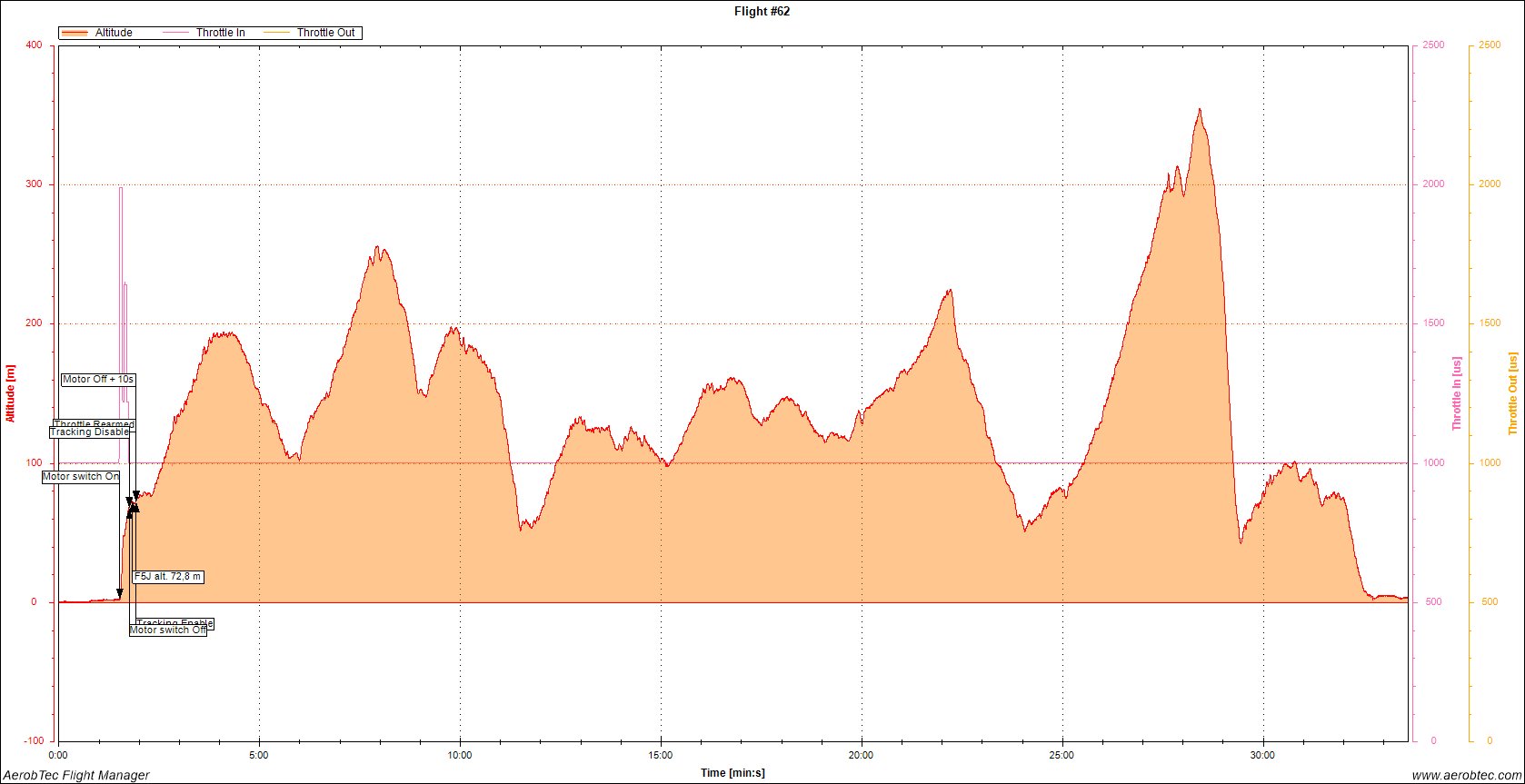
W ostatnią niedzielę miałem przyjemność polatać z Tomkiem M. Wiaterek przez cały dzień był w miarę równy i wiało 5m/s, w porywach do 6m/s. Pierwszą połowę dnia przelatałem ciężkim Vertigo - 1800g. Ciężkim nie z uwagi na wiatr a z chęci wlatania się w model. Mimo tego, że waga modelu była przesadzona w stosunku do wiatru to latało się bardzo przyjemnie i wielokrotnie udawało się zabrać. Drugą połowę dnia przelatałem dobalastowanym średniakiem z wagą 1600g do lotu. To była dobra waga na panujące warunki, chętniej się zabierał. Trenowaliśmy "piątki". Na ile było to możliwe, podpatrywałem loty i lądowania Tomka. Parę razy udało mi się zabrać co mnie bardzo cieszyło, jednak po wylądowaniu i odczytaniu altisa okazywało się , że jego wysokość to połowa mojej ? . Prawdę mówiąc nie jest to dla mnie żadne zdziwienie a raczej motywacja do treningu. Cieszę się , że mam do kogo równać
i zaczęły pojawiać się logi które cieszą.
-
4
-
-
Latałem kiedyś na DA-50 i ten motor wymagał dla docierania mieszanki 32:1 na oleju konkretnej marki podanej w manualu. Wymagane było wypalenie 2 do 4 galonów mieszanki. Po procesie docierania proporcje zależały od marki oleju i np. dla oleju z grupy Amsoil 100:1. Dla oleju Red-line 40:1. Ja latałem na Bel-Ray H1-R w proporcji 50:1. W manualu silnika musi być szczegółowa informacja na ten temat.
-
 1
1
-
-
Wspaniałe zawody, rodzinna atmosfera. Podobało mi się, że stare wygi chętnie dzielą się swoją wiedzą. Konrad, organizacja na 5+, dziękuję bardzo. Bardzo mnie cieszyło, że w zawodach brał udział kolega z Czeskiej Republiki Tomasz Marek który okazał się czarnym koniem zawodów. Pragnę złożyć moje gratulacje dla Edwarda Wowrego, Jarka Grzesicy oraz Tomka Mickiewicza- aktualnego Mistrza Polski w klasie F5J na rok 2022.
-
3
-
-
Trafiłem na coś takiego http://aviatika.sk/resources/T16SZ_T16IZ.pdf
-
Roxxy to bardzo dobre regulatory sprzedawane kiedyś przez firmę Robbe. Dedykowany programator ułatwia programowanie. Nie mam jednak wiedzy czy programator który posiadasz będzie działał z Roxxy. Jeżeli będziesz chciał to mogę Ci tego Roxxy zaprogramować wedle życzenia. Poniesiesz tylko koszty przesyłki ale czy taka gra jest warta świeczki?
-
Trzymaj fason.
-
1
-
-
Czteroportowa propozycja Franciszka jest kusząca
.
-
14 godzin temu, Konrad_P napisał:
Nic dodać nic ująć. Tak jak pisałem kilka postów wyżej, jak już załapiesz o co chodzi w tym krążeniu to od razu przyjdą efekty. Tylko kurde myślałem, że będzie to najszybciej w przyszłym sezonie a tu proszę jaka niespodzianka.
To zasługa korepetycji udzielanych przez dobrych profesorów
.
-
Zarówno ISDT jak i iCharger potrzebują przewodu zasilającego z wtykiem żeńskim XT60 od strony ładowarki, natomiast od strony zasilacza takie złącze jakiego wymaga zasilacz. Można również zamontować w zasilaczu gniazda laboratoryjne typu banan 4mm lub dowolne inne ogólnie dostępne gniazda żeńskie np. XT60 do montażu na tablicę. Można również przylutować na stałe przewód w zasilaczu i zakończyć go wtykiem żeńskim XT60. Rozwiązanie ostateczne jest uzależnione od złącza w danym typie zasilacza oraz możliwości ingerencji w konstrukcję zasilacza. Są zasilacze wyposażone w typową listwę zaciskową i wtedy sprawa jest prosta. Jeżeli mogę Ci doradzić to kup zasilacz firmy Mean Well o mocy około 500W. Przy takiej mocy w pełni wykorzystasz możliwości ładowarki proponowanej przez Damiana. Jeżeli natomiast jesteś pewien, że nigdy nie będziesz potrzebował prądu ładowania 20A to śmiało możesz kupić zasilacz około 200 do 250W. Wszystko zależy od tego jakie pakiety będziesz ładował. Do ładowania równoległego musisz mieć zasilacz 500W.
-
Ten mocowo i cenowo jest dobry https://allegro.pl/oferta/zasilacz-24v-21a-500w-qcs-dcj5001-01p-7707753888
Ten jest droższy ale dobrej marki https://allegro.pl/oferta/mean-well-zasilacz-impulsowy-24v-18a-500w-12190084297
-
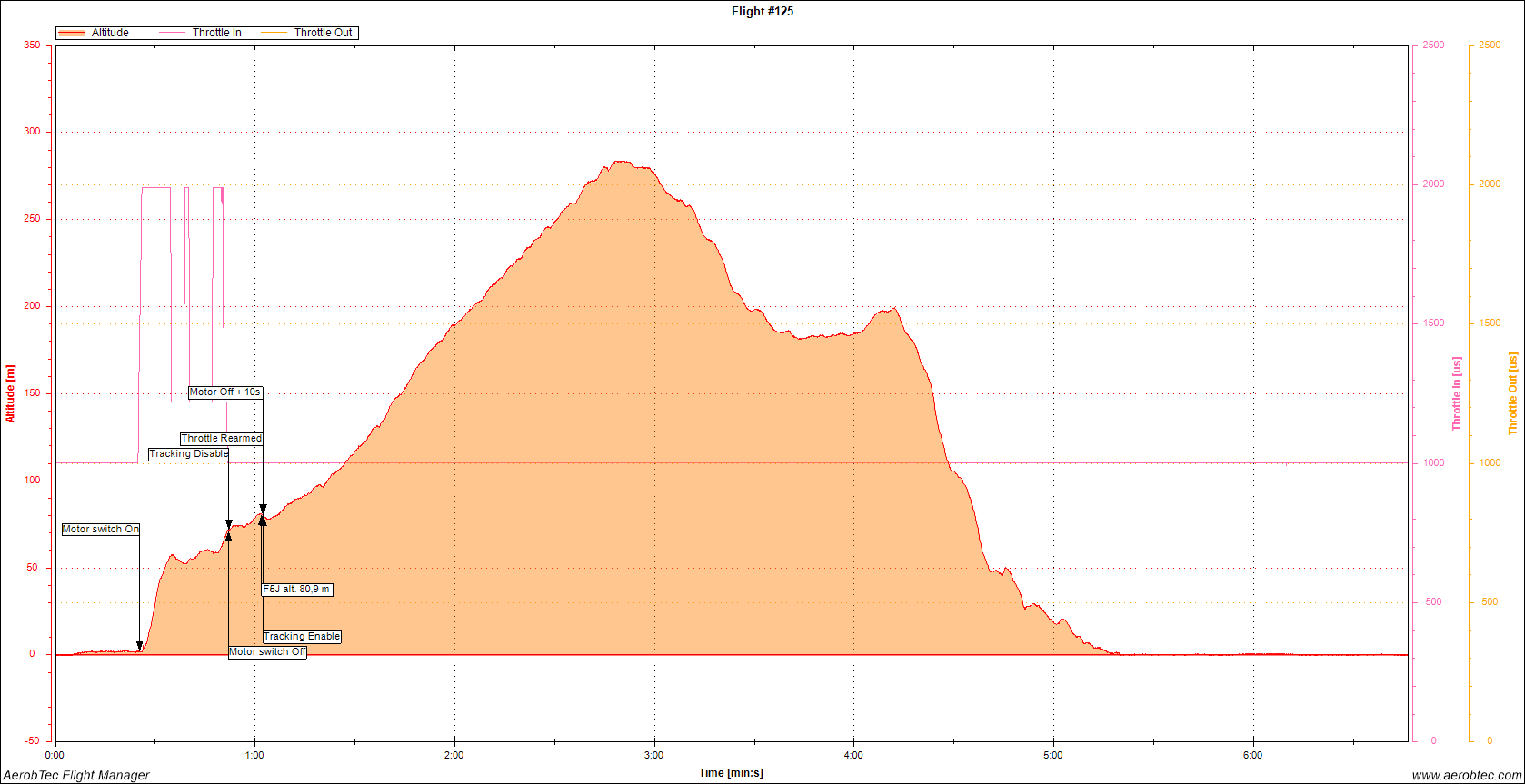
Korepetycje u Damiana i Tomka są bezcenne. Pragnę tutaj podziękować Damianowi i Tomkowi za cierpliwość
. Bezbłędnie wyłapali moje braki i dali cynk czego się uczyć. Wczoraj pojechałem na "moją" łączkę aby przetestować nową dawkę wiedzy. Mocno eksperymentowałem z krążeniem w kominie z różnymi ustawieniami płata - cruise, speed, termik-z różnym camberem. To jest to. Zaczynam łapać o co chodzi. Przykre jest tylko to, że bawiąc się w modelarstwo rekreacyjne przez niemal 50 lat nie zdawałem sobie sprawy z tego, że dopiero modelarstwo jak to mówią zawodnicze weryfikuje umiejętności. Cieszy mnie to, że trafiłem na takich modelarzy jak Damian i Tomek. Dowodem na potwierdzenie odrobionych lekcji niech będzie poniższy log z wczorajszego latania.

-
3
-
-
iCharger https://www.icharger.com.pl/
-
Brawo, brawo, brawo. Koledzy, jesteście wspaniali. Podziwiam wszystkich z polskiej ekipy.
-
Władek, tutaj coś znajdziesz https://www.rc-network.de/threads/kontronik-kpg-getriebe-abmontieren.432027/
-
Jest po prostu piękna ?.
-
1
-
-
-
Ładowanie NiMH prądem 0,2A z detekcją końca procesu ładowania Delta U delikatnie mówiąc nie zdaje egzaminu. Dużo cennych informacji na temat parametrów ładowania różnych ogniw znajdziesz w instrukcji ładowarki rodzimej produkcji PULSAR 2.

Respect Evo F3F - relacja i loty
w Szybowce
Opublikowano
Dla pakietu 3s zalecane śmigło to 15x8 a Twoje to 16x10 dla 4s i dziwisz się, że gotuje się silnik i regler? Jaki cykl pracy silnika - ile sekund pracy ile minut przerwy. Oczywiście w przybliżeniu. Jaki maksymalny pobór prądu? Pytam tak z ciekawości.