






Ryszard_I
-
Postów
581 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Odpowiedzi opublikowane przez Ryszard_I
-
-
Stanisław , bardzo Ci dziękuje za wyjaśnienie tematu osi podłużnej samolotu. Zastanawiam się czy ten parametr (oś podłużna modelu) ma zastosowanie w naszym hobby przy regulacji i wyznaczania CG naszego modelu. Jeżeli masz jakieś przemyślenia na ten temat to bardzo Cię proszę, napisz.
-
2 godziny temu, RobRoy napisał:
A od czego mierzysz kąt zaklinowania skrzydła ?... statecznika poziomego? czy aby nie od osi podłużnej?
Montuję kątomierz na skrzydle blisko kadłuba i tak ustawiam model aby uzyskać kąt 0 stopni. Następnie zakładam kątomierz na statecznik poziomy i odczytuję wartość kąta. Ta różnica kątów jest kątem zaklinowania. Nie jest potrzebna do tego pomiaru żadna oś podłużna. Można to również zrobić od "tyłu". Założyć kątomierz na statecznik poziomy, ustawić model tak aby kąt był równy 0 stopni a następnie założyć kątomierz na skrzydło i odczytać wartość kąta.
2 godziny temu, jarek_aviatik napisał:Sorry, wysiadam. Chyba, że próbujesz ze mnie żartować
Proszę tylko o jedno. Jak wyznaczyć oś podłużną modelu. Nie chodzi mi o rysunki z książek bo z tych rysunków nie wynika jak tego dokonać. Jak wyznaczyć dwa punkty na kadłubie aby linia przechodząca przez te punkty była osia podłużną modelu.
-
5 minut temu, jarek_aviatik napisał:
Wg W. Schier - miniaturowe lotnictwo
W. Schier zaznaczył na rysunku "umowną oś kadłuba". Umowna to znaczy, że nie wynika ona z żadnej definicji i linia prosta która ją wyznacza może łączyć dwa punkty naniesione na kadłub modelu, jeden punkt to powiedzmy wierzchołek kołpaka a drugi punkt to jakiś punkt na stateczniku pionowym. Z czego wynika umiejscowienie tego punktu na stateczniku pionowym właśnie w tym miejscu a nie 5mm wyżej czy niżej?
16 minut temu, jarek_aviatik napisał:Można robić w modelu jakąś powierzchnię równoległą do tej osi,
Jak robić jakiekolwiek powierzchnie równoległe do osi skoro nie znamy położenia tej osi. Załóżmy, że jednym punktem linii wyznaczającej oś podłużną będzie wierzchołek kołpaka. Jak wyznaczyć ten drugi punkt na stateczniku pionowym?
-
8 godzin temu, jarek_aviatik napisał:
Model do takiego ważenia powinien być wypoziomowany, tzn oś podłużna modelu ma być w poziomie.
Co to znaczy wypoziomowany - gdzie przyłożyć poziomicę aby ten poziom uzyskać. Jaka jest definicja osi podłużnej modelu? Jak wyznaczyć oś podłużną modelu? Czy jest jakaś definicja, w której jest mowa o dwóch punktach na kadłubie (nos i ogon) przez które ma przebiegać linia prosta wyznaczająca oś podłużną modelu? No może trochę za dużo pytań - ale jak to mówią "kto pyta nie błądzi".
Piszesz - zostawmy kąty zaklinowania w spokoju ale to są wartości konkretne i zmierzalne. Wartości które przeważnie są zawarte w instrukcji modelu. Natomiast oś podłużna modelu?
-
20 godzin temu, Market napisał:
Wydaje mi się, że różnica będzie znikoma, jeżeli nie żadna
W przypadku mojego testowego modelu różnica może być niewielka ale jednak odległość między osią kół przednich a rzutem osi kółka ogonowego zmieni się. Skoro odległość się zmieni to i wynik pomiaru będzie inny. Skoro wynik pomiaru będzie inny to znaczy, że nie będzie się pokrywał z wynikiem pomiaru uzyskanym na wadze "wzorcowej". W przypadku średniopłata który ma dość krótkie golenie podwozia przedniego i dość długą goleń kółka ogonowego różnica odległości między osią kół przednich a rzutem osi kółka ogonowego będzie niewielka. Natomiast kiedy będziemy mieli do czynienia z modelem górnopłata którego kadłub w swojej pozycji spoczynkowej jest pod znacznym kątem w stosunku do poziomu to różnica odległości między osią kół przednich a rzutem osi kółka ogonowego będzie zdecydowanie większa. Nurtuje mnie inny problem dotyczący ustawienia modelu z kółkiem ogonowym do wyznaczenia CG. Czy skrzydło ma być na 0 stopni czy statecznik na 0 stopni. W przypadku testowego modelu ten problem mnie nie dotyczył ponieważ model akro ma kąt zaklinowania 0 stopni i mogę ustawić płat lub statecznik na 0. Jednak w przypadku górnopłata z kątem zaklinowania np. 10 stopni wyniki pomiarów będą się różniły w zależności od tego czy płat jest na 0 stopni czy statecznik jest na 0 stopni. Idąc dalej moje przemyślenia są takie, że przy stateczniku na 0 i skrzydle na 0 różnica odległości między osią kół przednich a rzutem osi kółka ogonowego zmieni się nieznacznie ponieważ w obu przypadkach kadłub będzie w pozycji zbliżonej do poziomej i podniesienie ogona o 10 stopni aby uzyskać 0 stopni na skrzydle będzie miało niewielki wpływ na odległość między osią kół przednich a rzutem osi kółka ogonowego. Nie mam jednak pewności czy dobrze rozumuję.
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
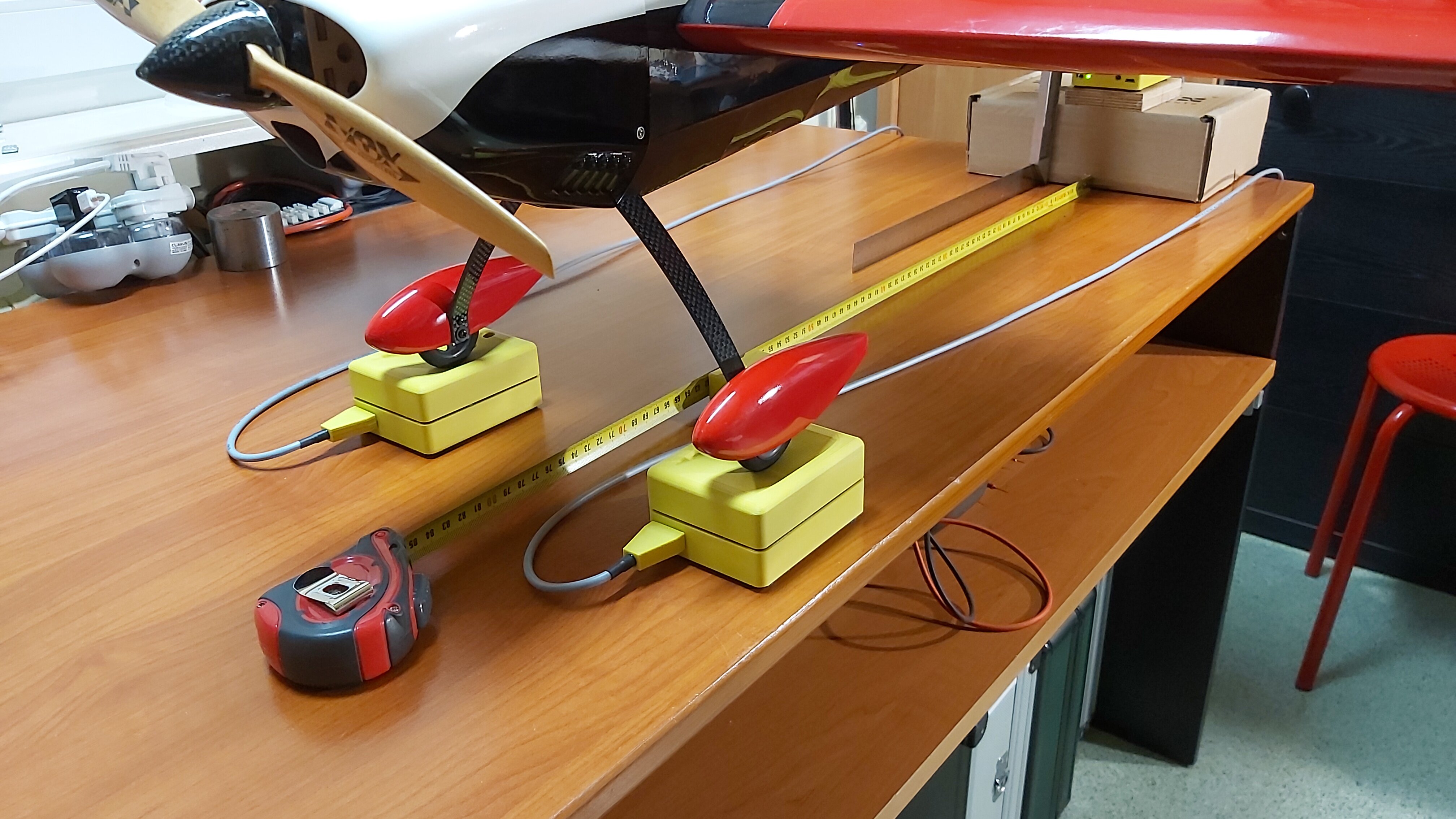
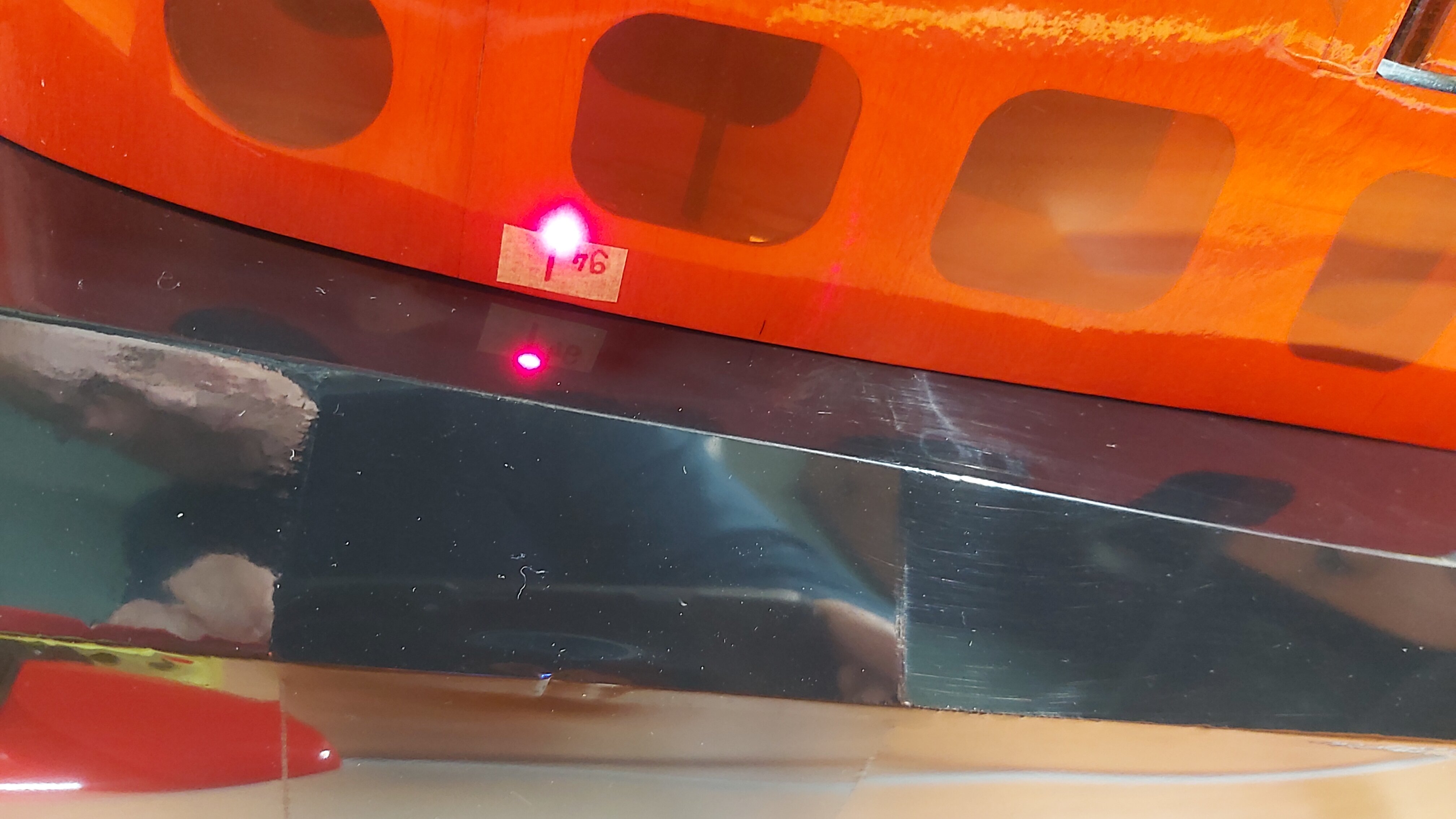
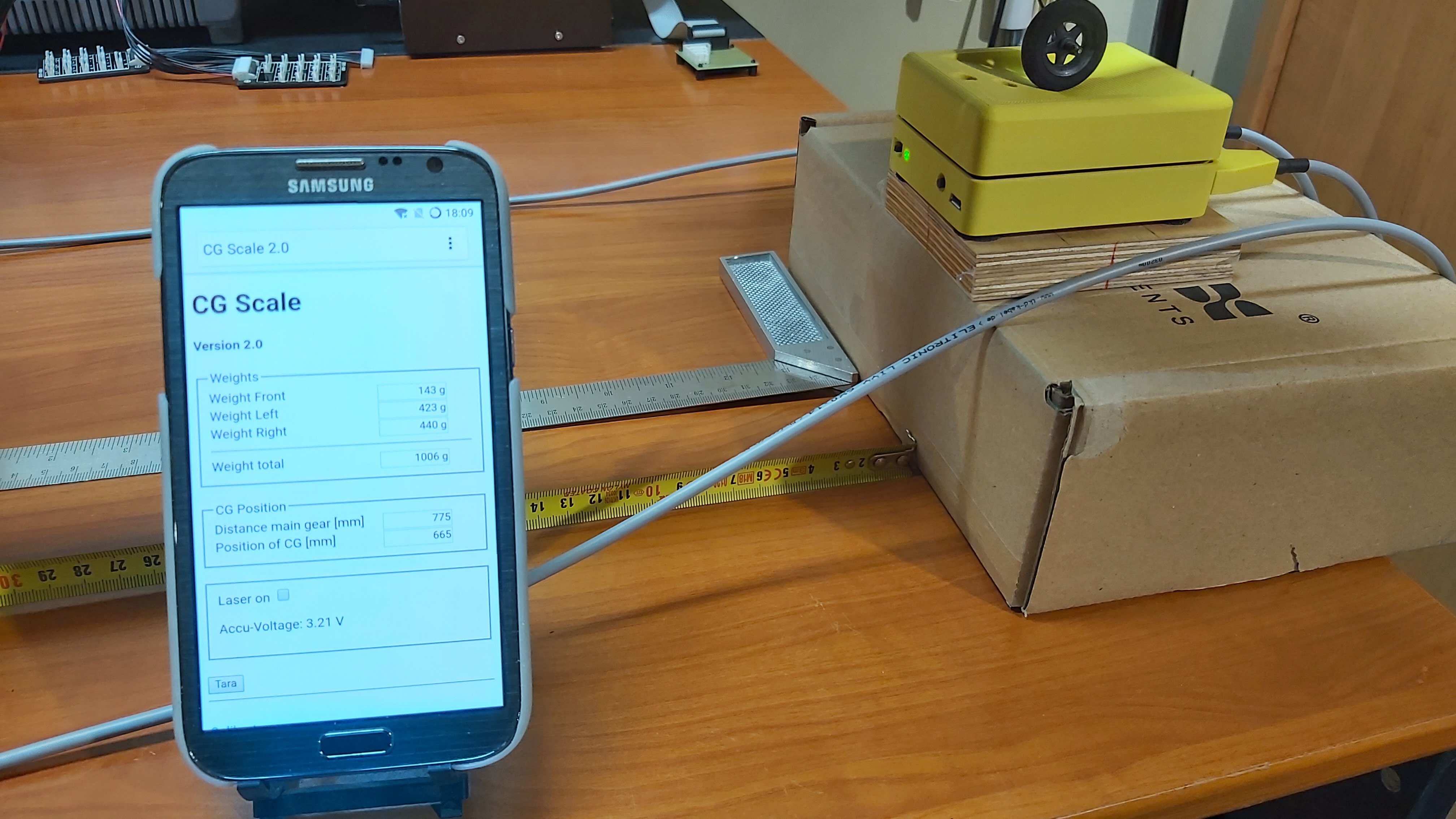
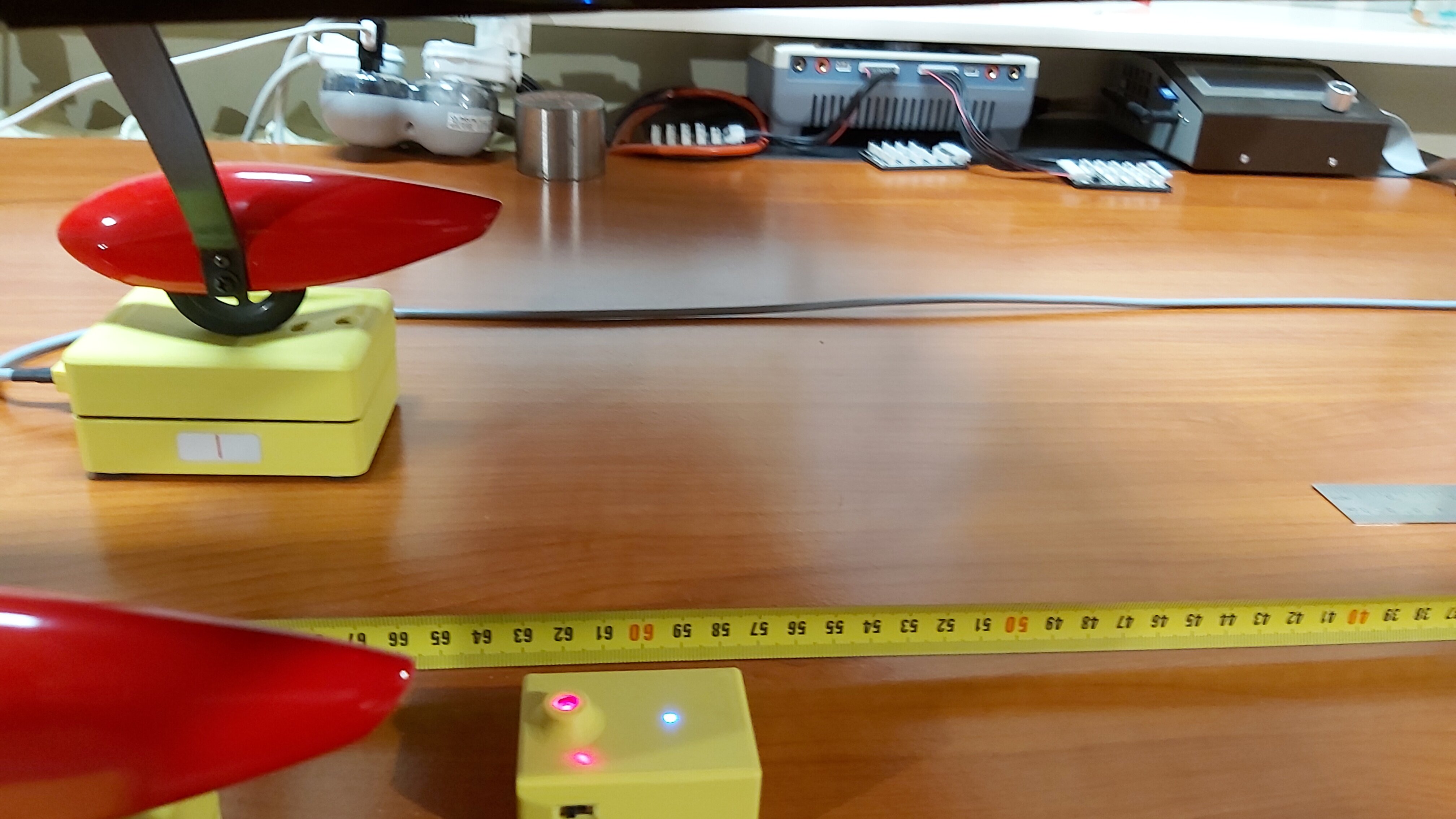
Kilka dni temu dopadło mnie jakieś przeziębienie i nie byłem w stanie nic podziałać -totalne nieróbstwo. Jednak dzisiaj poczułem zdecydowaną poprawę i pomyślałem, że trzeba zrobić obiecany test wagi na modelu z kółkiem ogonowym. Niestety nie mam modelu o ciężarze godnym tej wagi ale posiadam dyżurną kilówkę Extra 260 od PA. Najpierw ustaliłem CG za pomocą typowej modelarskiej wagi tensometrycznej w której model podparty jest w czterech punktach pod skrzydłem. Zmierzone CG znajduje się 94,5 mm od krawędzi natarcia. W tym miejscu od spodu płata nakleiłem taśmę maskującą i zaznaczyłem czerwoną kreską wyznaczone CG. Następną ważną czynnością było takie podparcie pod kółkiem ogonowym aby skrzydło było na 0 stopni. Podłożyłem jakiś karton, kawałek sklejki i jest dobrze. Podłożyłem pod koła trzy wagi. Zmierzyłem odległość od osi głównego podwozia do rzutu osi kółka ogonowego. Wartość wpisałem do programiku CG Scale i dowiedziałem się w jakiej odległości od rzutu osi kółka ogonowego znajduje się CG. Wskaźnik laserowy położony w odpowiednim miejscu przymiaru wskazał mi punkt CG. Najbardziej zdziwiło mnie to, że ten punkt idealnie pokrywał się z tym wcześniej wyznaczonym CG
") . Śmiało mogę stwierdzić, że waga choć zaprojektowana dla modeli z kółkiem dziobowym (autor projektu lata odrzutowcami), nadaje się również do modeli z kółkiem ogonowym.
. Śmiało mogę stwierdzić, że waga choć zaprojektowana dla modeli z kółkiem dziobowym (autor projektu lata odrzutowcami), nadaje się również do modeli z kółkiem ogonowym.

Ponieważ projekt jest jak najbardziej udany zachęcam modelarzy do budowy ?.
-
 5
5
-
Dron zbudowany na ramie węglowej Martian II z zastosowaniem dodatkowych elementów drukowanych. Kontroler MATEK F722-SE, odbiornik TBS Crossfire Nano Rx+antena Immortal T.
VTX - TBS Unify EVO z zaprogramowaną funkcją PIT Mode (nadawanie niską mocą w czasie testów) + antena Menace RHCP, kamera RunCam Eagle 2 PRO, regulatory HGRLC T-Rex 60A, silniki BrotherHobby Returner R6, 2207-1750kV(rainbow), śmigła Dalprop 5”x4”. Dron wyposażony w beacon z własnym zasilaniem (buzer+LED) oraz oświetlenie 2x8LED RGB w pełni programowalne z kontrolera. Minusowy przewód zasilający drona posiada złącze niwelujące iskrzenie podczas podłączania pakietu (AntiSpark). W komplecie 3 pakiety LiIon 6s zbudowane z ogniw SONY 18650 VTC 5A + konektory Gold Fi 6mm. Pakiety w stanie idealnym ponieważ tym dronem wykonałem niewiele lotów i przekonałem się, że drony to nie moja bajka. Dodatkowo załączam 2 kompl. śmigieł 5”x4”, 2 kompl. 5”x4,3”, 2 kompl. 5”x4,5” oraz 2 kompl. 5,1”x4,7” z zaznaczeniem, że śmigła 5,1” nie pasują do tego drona ponieważ mają za dużą średnicę. Zestaw zawiera płytkę do programowania kamery oraz dodatkowo drukowane klucze i kleszcze ułatwiające montaż śmigieł, 5 sztuk zapasowych aluminiowych nakrętek samohamownych do przykręcania śmigieł. Dron jest bezwypadkowy, bez śladów używania, wygląda jak nowy i jest w pełni zaprogramowany w niżej opisanym nadajniku.
Takie są zastosowane regulatory.
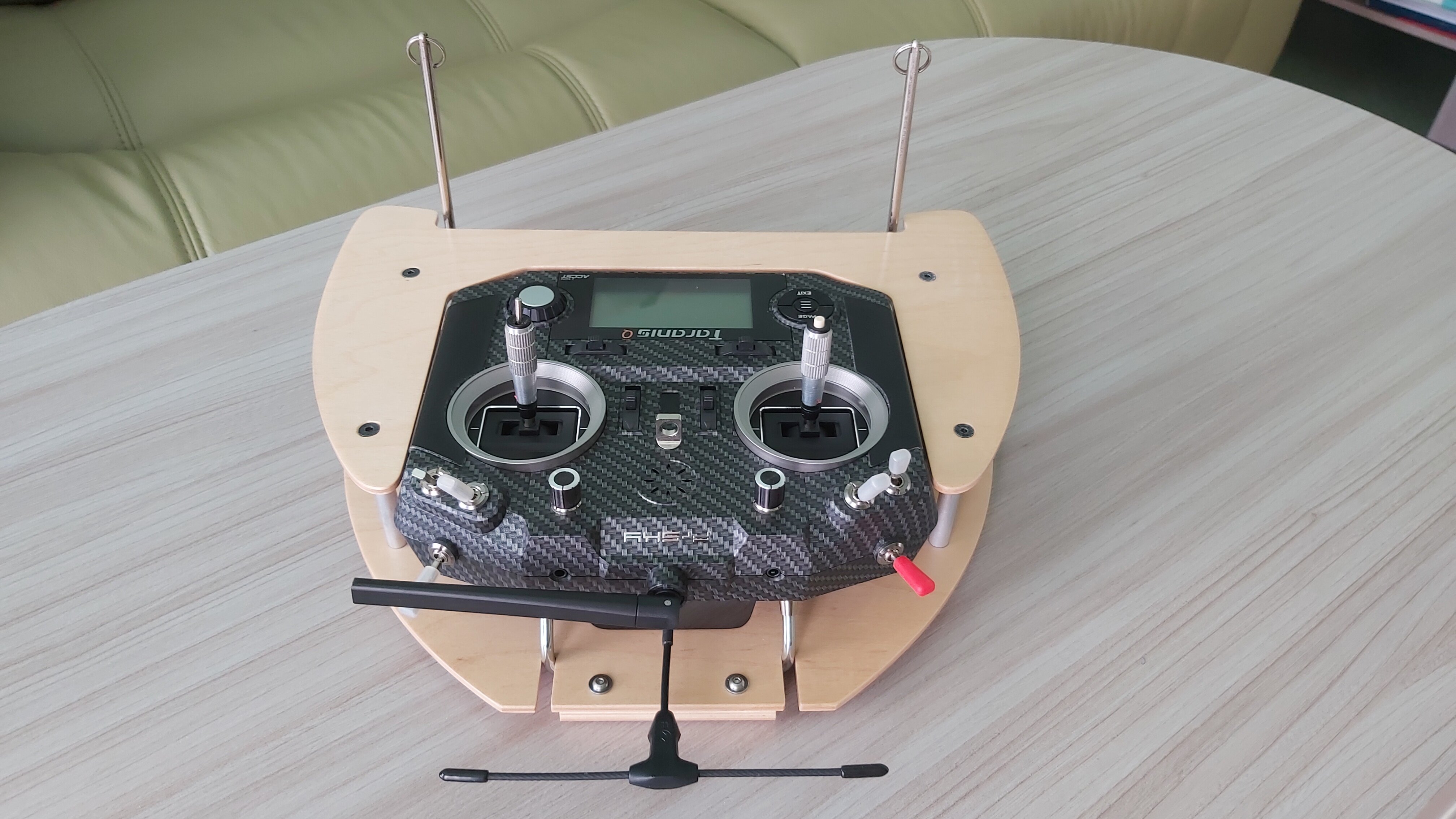
Nadajnik z modułem nadawczym TBS Crossfire Micro TX pracujący w pasmie UHF 868MHz który wg producenta zapewnia zasięg od 15 do 20km, w dobrych warunkach nawet do 40km. Moduł zapewnia pełną telemetię. Ponieważ używam nadajników pulpitowych to wykonałem do niego pulpit ze sklejki który posiada składane ramiona. Ramiona wykorzystałem od nadajnika Multiplex MC 4000. Elementy dystansowe toczone z aluminium. Elementy sklejkowe starannie oszlifowane i polakierowane. W komplecie szelki również od MC4000. Oryginalne krótkie końcówki drążków przeznaczone do obsługi kciukami zamieniłem na długie, wyposażone w dodatkowy przełącznik dwupozycyjny oraz przycisk chwilowy. W ten sposób wykorzystałem dwa dodatkowe wolne kanały nadajnika. Oczywiście oryginalne końcówki są w zestawie. W komplecie jest wszystko to co powinien zawierać sklepowy zestaw czyli miękka walizka, zasilacz ładowarki LiPo/NiMh, ładowarka LiPo/NiMh, pasek do zawieszenia nadajnika na szyję wraz z metalowym ramieniem przykręcanym do nadajnika oraz instrukcja obsługi. Dodatkowo załączam zapasowy oryginalny akumulator nadajnika oraz instrukcję obsługi Open TX którą napisał Andre Bernet a przetłumaczył na język polski Mariusz Dąbrowski. Nadajnik był używany do sterowania dronem Martian II i posiada zainstalowane skrypty LUA które umożliwiają konfigurację odbiornika Crossfire Nano RX, nadajnika video TBS Unify EVO oraz ważniejsze ustawienia Betaflight. Wgrane polskie komunikaty głosowe.Nadajnik jest w idealnym stanie technicznym i wizualnym. Brak jakichkolwiek śladów używania, wygląda jak nowy. Do sprzedania w komplecie z dronem Martian II. Całość wyceniam na 1200 PLN + koszt wysyłki paczkomatem. Gdy nie będzie chętnego nabywcy kompletu rozważę sprzedaż samego drona lub nadajnika. Dla nabywcy kompletu ofiaruję w formie prazentu bezprzewodowy moduł „trener – uczeń” zbudowany na odbiorniku FrSky który umożliwi bezprzewodową współpracę z innym nadajnikiem FrSky. Moduł posiada własne zasilanie LiIon 1s, monitor napięcia z alarmem niskiego napięcia, gniazdo MPX ładowania ogniwa oraz wyłącznik zasilania. Moduł nie jest urządzeniem fabrycznym lecz konstrukcją własną.
-
Kwestie teoretyczne są mi znane. Zaciekawił mnie czas 20ms uznany jako optymalny. Nie mam na tyle doświadczenia abym mógł wnieść do dyskusji jakieś wartościowe spostrzeżenia. Zbudowaną przez siebie zgrzewarką pobawiłem się zgrzewając testowo jakieś stare ogniwa NiMH taśmą Fe-Ni o grubości 0,15mm. Zastosowany sterownik nie ma sterowania fazowego natomiast załącza się w szczycie napięcia i umożliwia ustawienie czasu co 10ms. Ma on również funkcję podwójnego zgrzewu który wykonywany jest 100ms po pierwszym zgrzewie. Czas drugiego zgrzewu jest również regulowany co 10ms. Dobre efekty uzyskałem stosując podwójny zgrzew z czasem ustawionym na 30ms dla obu zgrzewów. W związku z tym, że moja obudowa jest wymiarowo z dużym zapasem to myślałem o tym aby zastosować drugi transformator i poeksperymentować z łączeniem uzwojenia wtórnego ale zapał minął i chyba szybko nie wróci
.
-
7 godzin temu, Adam P. napisał:
Czyt.-liczy się głownie moc, a optymalny czas grzania to 20ms, jak trzeba grzać dłużej, to znaczy że brakuje mocy.
Zaintrygowało mnie wspomniane 20ms. Nie z upierdliwości a z ciekawości
.
-
1 godzinę temu, Adam P. napisał:
jak trzeba grzać dłużej, to znaczy że brakuje mocy.
Podoba mi się Twoja teoria. Czy mógłbyś podać źródło Twojej wiedzy? Pragnę zaznaczyć, że nie jest to sarkazm z mojej strony.
-
17 godzin temu, mar_io napisał:
Też wolę SAM lutować. Tutaj przyznam rację Panu Jurkowi. Jednak ostatnio mimo iż uważam że mam doświadczenie wystarczające w lutowaniu i park maszynowy to myślę o zgrzewarce. Ale chyba nie ma sensu wydawać kilkaset złotych na zgrzewarkę, wolę wymieniać cyklicznie gotowe pakiety, czas amortyzacji jest długi.
Swoją zgrzewarkę zbudowałem nie z potrzeby zgrzewania ogniw ponieważ pakiety napędowe począwszy od NiCd używane parę dekad temu, przez NiMH i LiIon zawsze lutowałem. Kiedyś lutowało się ogniwa w pionie i była do tego wymyślna technologia a mianowicie lutownica oporowa i grot tzw. młotkowy (dziadki wiedzą o co chodzi). Zgrzewarkę zbudowałem ponieważ lubię budować i z działaniem urządzenia zapoznać się dogłębnie.
-
Jean, dziękuję za gratulacje
i przede wszystkim bardzo dziękuję za Twoje pomysły.
-
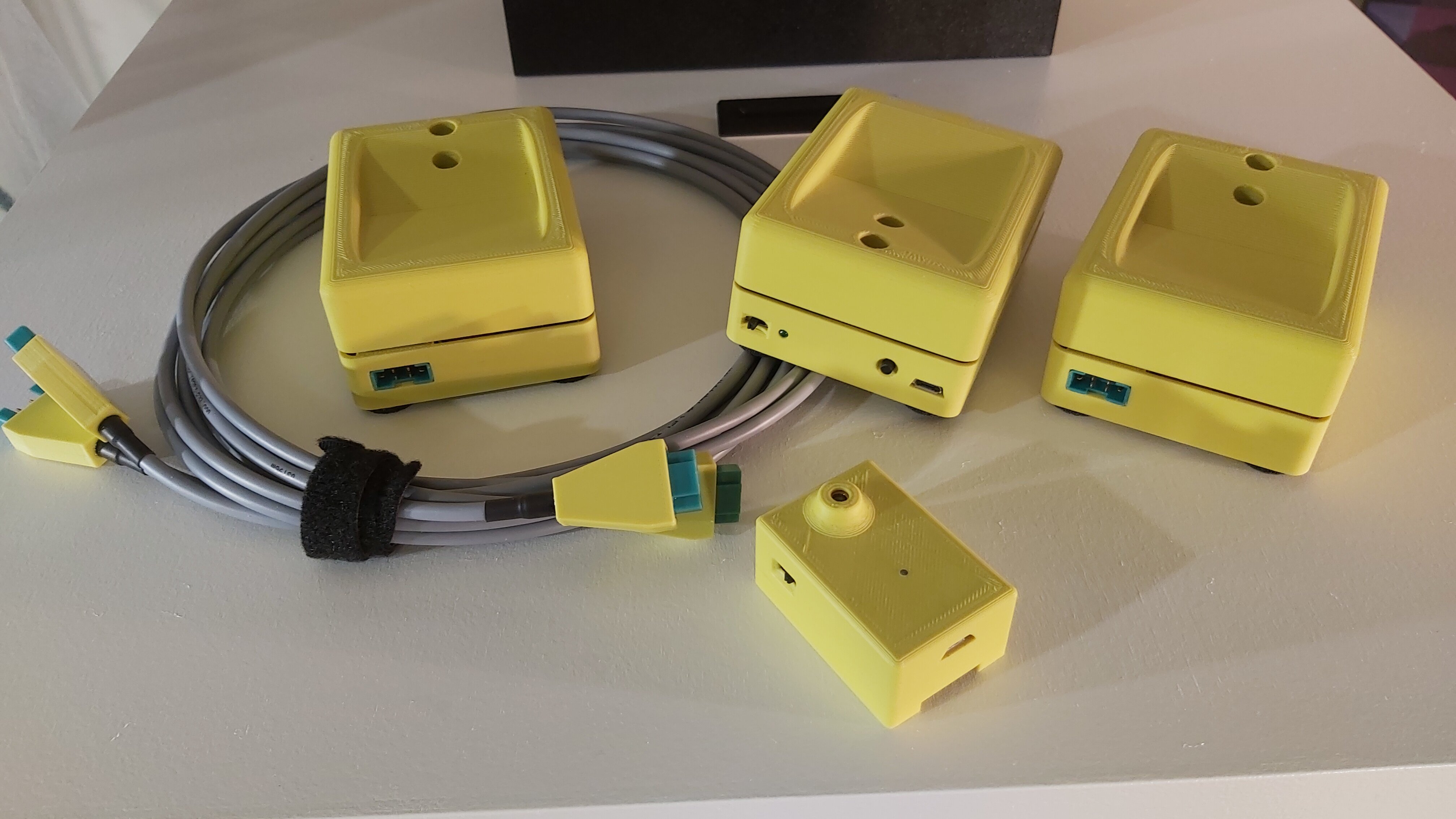
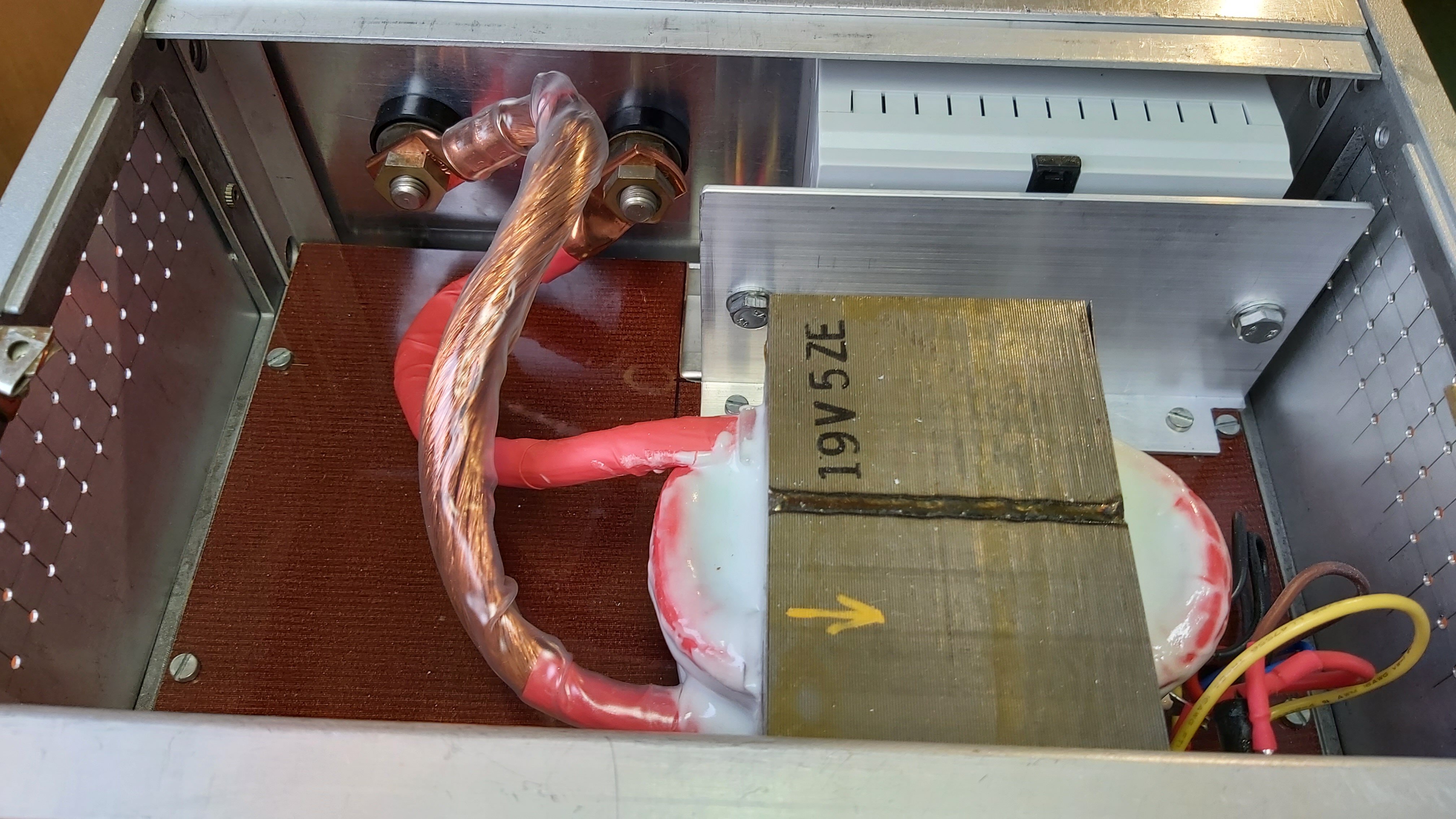
Kiedyś mnie naszło i popełniłem zgrzewarkę na trafo z mikrofalówki. Do budowy zachęcił mnie fakt, że sterowniki robi Pan z Legnicy. Uchwyt drukowany wynaleziony na Thingiverse z krańcówką wyzwalającą pod wpływem nacisku. Wygląda to tak:
Wewnątrz
.
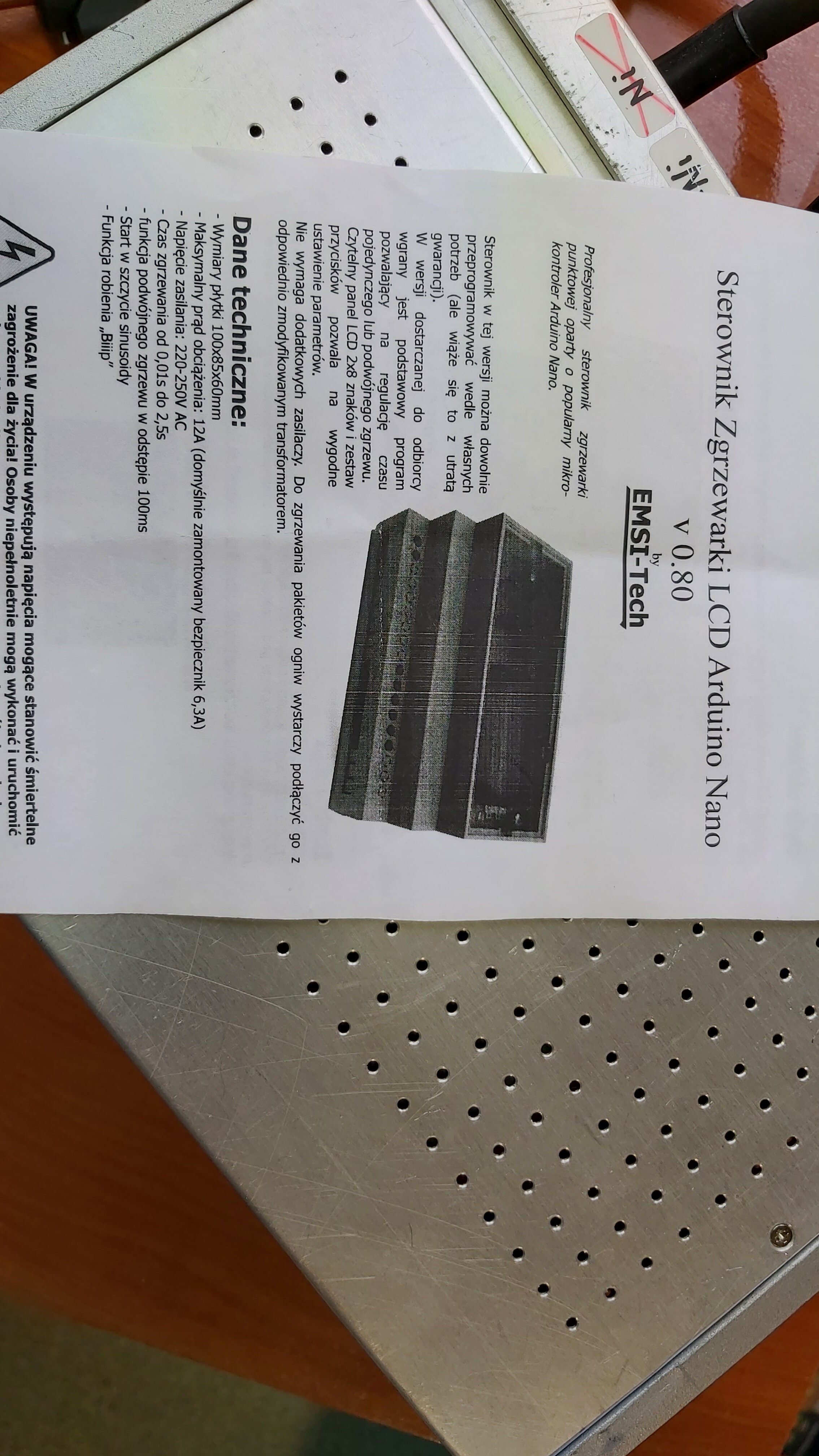
Instrukcja sterownika
Mogę odsprzedać.
-
Podczas lotu elektroszybowcem miałem taką przygodę. Obserwowałem model na tle błękitnego nieba i po włączeniu silnika nagle zauważyłem przez krótką chwilkę smużkę dymy za modelem która pojawiła się i znikła. Nie byłem pewien czy to działo się faktycznie czy może to było jakieś złudzenie optyczne. Model zachowywał się normalnie i reagował na stery. Po wylądowaniu okazało się, że jeden z elektrolitów wystrzelił tak, że na druku regulatora zostały jego nóżki wraz z gumowym korkiem a obudowa z zawartością leżała sobie w kadłubie. Nie zadziałał bezpiecznik (nacięte wieczko kondensatora), puścił gumowy korek.
-
Nie chcę być źle zrozumianym. Ja nie jestem przeciwnikiem firmowych akcesoriów. Sam bardzo chętnie je stosuję ale nieraz warto podejść indywidualnie do niektórych rzeczy.
-
Godzinę temu, dariuszj napisał:
Chyba się nie opłaca, bo za 68 zł z przesyłką można kupić gotowy z fajną obudową:
Darek masz całkowitą rację. Z Twoich linków wnioskuję, że samodzielne zrobienie dekodera kompletnie się nie opłaca. Tak nawiązując do drogich modeli a wyposażenia "po taniości" to 10 krotne przepłacenie nie jest żadną gwarancją bezawaryjnej pracy. Wszystko robione jest na chińskich elementach. O jakości urządzenia decyduje jakość wykonania oraz stabilność oprogramowania a nie napis na obudowie czy cena . No może komfort psychiczny będzie większy gdy na obudowie dekodera będzie duży napis FUTABA
.
-
W dniu 21.04.2022 o 22:16, TomTech napisał:
A zobacz to https://github.com/MikeBland/SbusToPWM działa bo sprawdzałem.
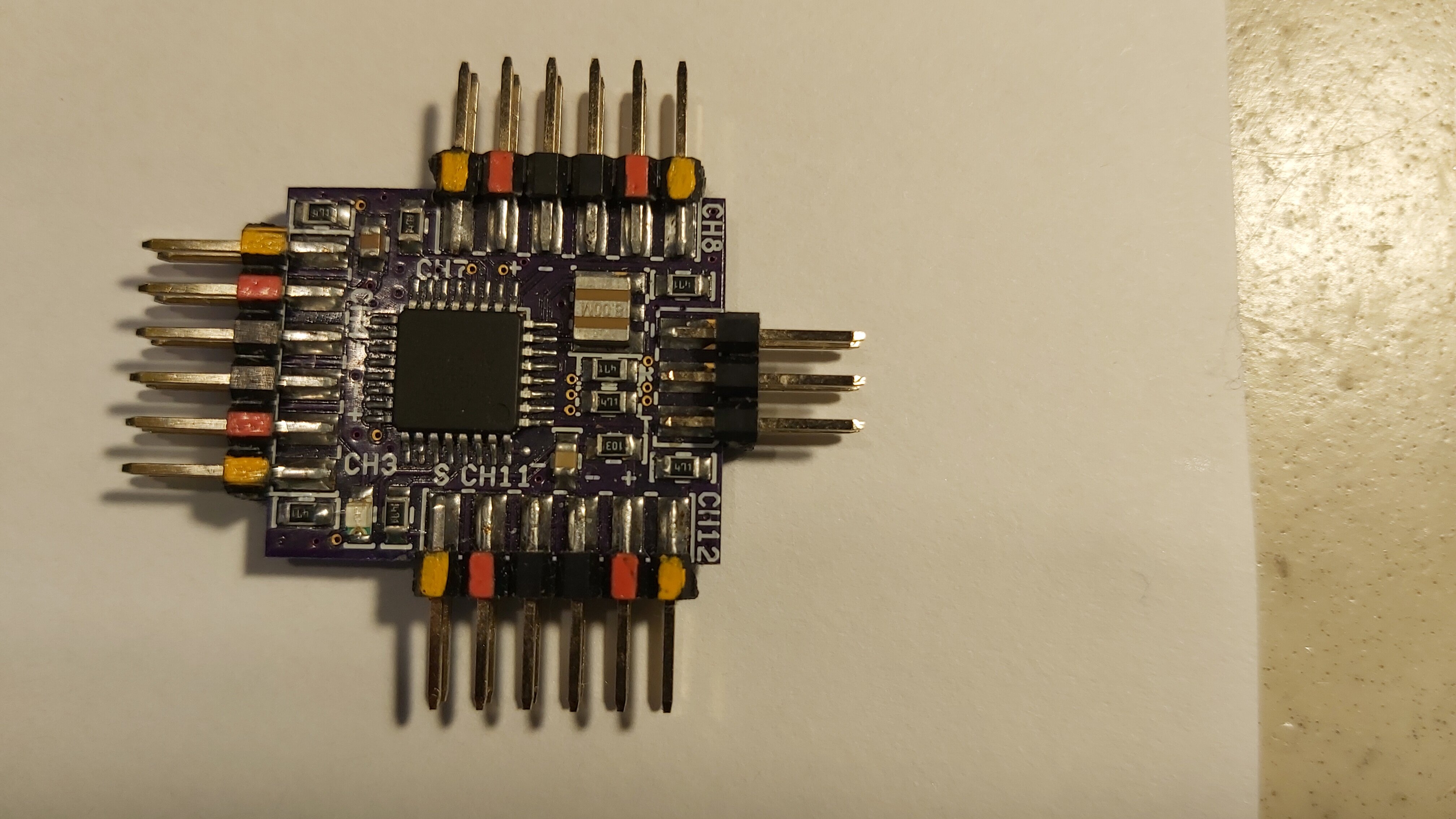
Najtaniej to chyba ten proponowany przez Tomka. Całościowy koszt to około 50zł jak sam wykonasz. Bardzo fajne, programowalne dekodery robił również modelarz i elektronik z forum FPV o nicku "Miś" ale to były dekodery 12 kanałowe.
-
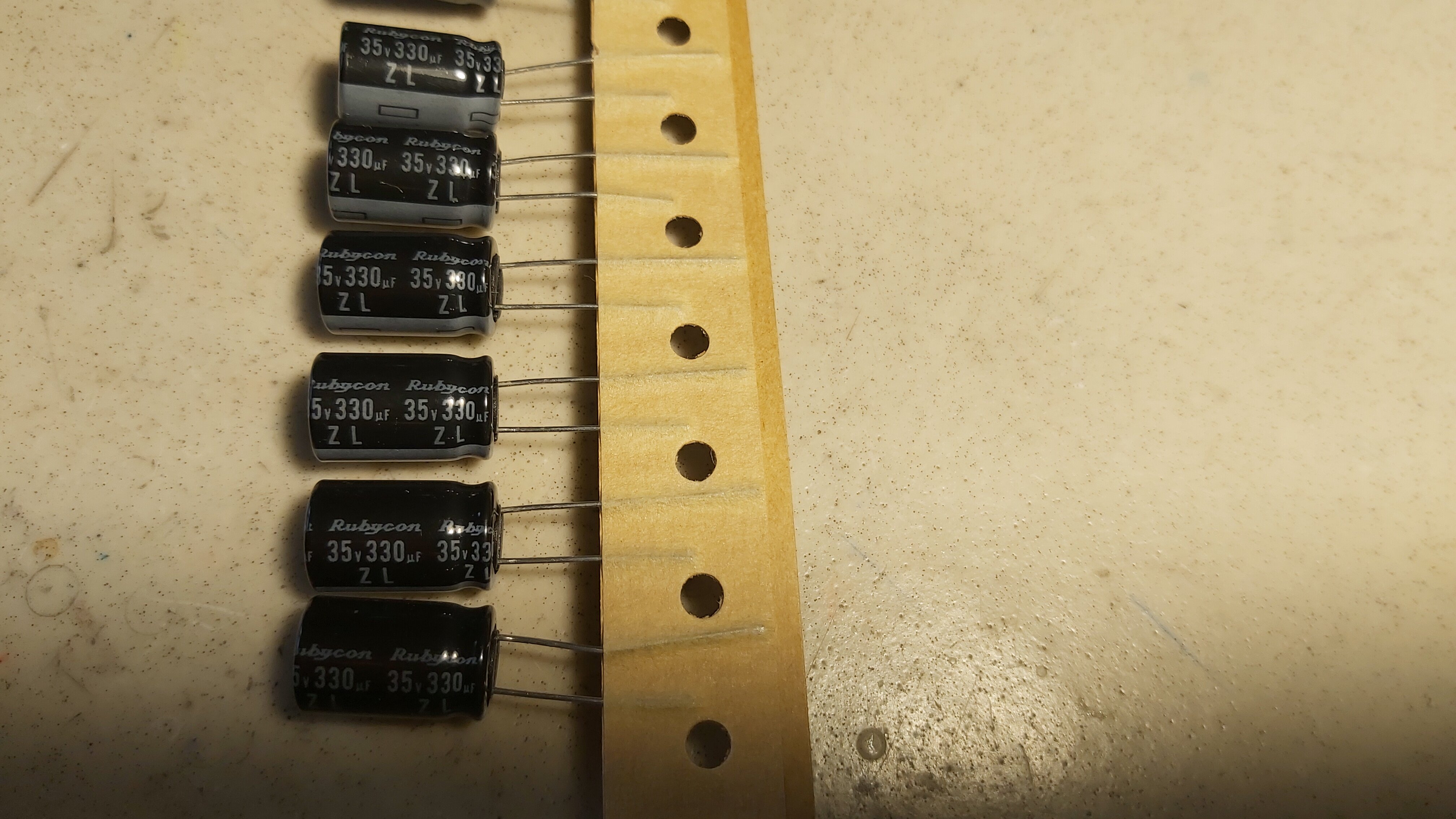
W TME jest tego dużo ale tego konkretnego kondensatora firmy Rubycon w wykonaniu ZL nie ma.
-
-
Paweł, czym zasilasz ten regulator. Jeżeli ogniwami LiPol to ile cel ma pakiet zasilający. Jak latasz na 14 ogniwach LiPol to kondensatory powinny być na co najmniej 63V. Jak jest w rzeczywistości?
-
Wlutuj nowe kondensatory o takiej samej pojemności i napięciu. Ważne są również wymiary i raster wyprowadzeń. Przy okazji wymień termopad. Muszą to być kondensatory niskoimpedancyjne o temperaturze pracy 105 stopni C. Do regulatorów bardzo dobre są kondensatory firmy Rubycon z oznaczeniem ZL(niskoimpedancyjne).
Zabrudzoną elektrolitem elektronikę umyj spirytusem izopropylowym używając np. szczoteczki do mycia zębów i jak wyschnie polakieruj lakierem PVB60, nawet kilkakrotnie. Tylko nie lakieruj radiatorów tranzystorów mocy ale ich wyprowadzenia jak najbardziej. Lakier ten doskonale zabezpiecza elektronikę przed wilgocią (przed elektrolitem z kondensatorów także
).
-
Czerwony przewód to plus zasilania podany z odbiornika do dekodera, minus podany ekranem RG174 co nie jest zgodne ze sztuką i gorący RG174 to S-BUS. Zgodnie ze sztuką to zasilanie plus i minus powinno być wykonane dodatkowym dwużyłowym przewodem a ekran RG174 powinien być bezprądowy podłączony do masy czyli w naszym przypadku do minusa zasilania w odbiorniku.
-
1
-
-
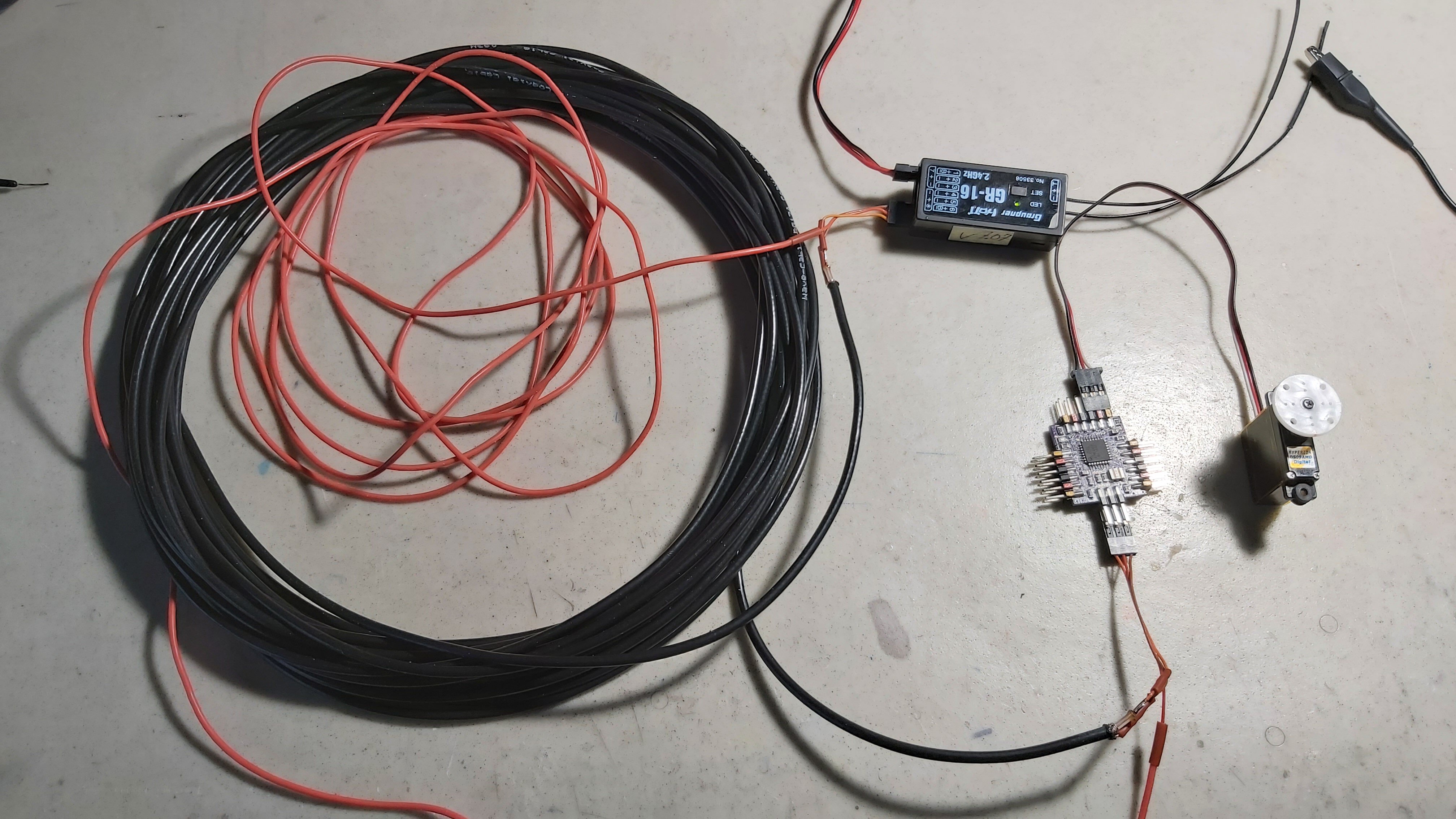
Sprawdziłem na przewodzie RG174 bo taki miałem i to dokładnie o długości 10m. Działa bez problemu.
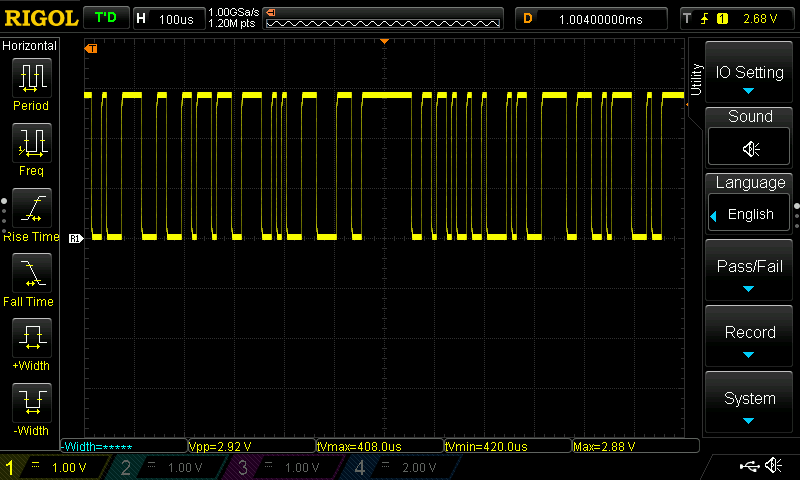
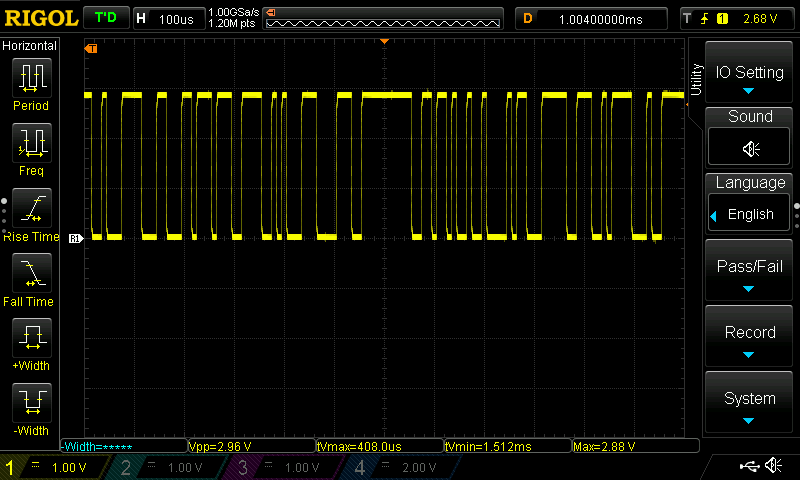
Sygnał S-BUS na wyjściu z odbiornika.
.
Sygnał S-BUS na końcu przewodu czyli na wejściu dekodera.
Na końcu przewodu sygnał czysty nie zniekształcony i o dziwo o większej amplitudzie ?.
Sprawdziłem również na Jeti i amplitudy sygnału na podobnym poziomie a dokładnie 3,12Vpp.
-
1
-
 1
1
-
-
Zasilanie to osobna sprawa. Mowa jest o przesłaniu sygnału S-BUS. W międzyczasie wygrzebałem w moich "przydasiach" ponad 10m RG174 oraz 12 kanałowy dekoder S-BUS. Nie posiadam Futaby ale mam możliwość przetestowania przesyłania sygnału S-BUS na Graupnerze oraz Jeti. Jak dam radę to jutro to zrobię i o wynikach powiadomię.






















Moduł Jeti DUPLEX TU 2,4GHz pytanie o odbiorniki
w Odbiorniki RC
Opublikowano
Tylko Jeti 2,4GHz.