






Ryszard_I
-
Postów
575 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Odpowiedzi opublikowane przez Ryszard_I
- Poprzednia
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- Dalej
- Strona 2 z 25
-
-
Ten problem występuje w szybkich żywicach różnych producentów. Kiedyś do wklejania wręg używało się UHU Plus 300kg i sprawdzał się nawet w modelach F5B. Dodatkową zaletą tego kleju było to, że był dostępny w marketach. Jednak po jakimś czasie zniknął z oferty a pojawił się nowy UHU Plus ale bez dopiski 300kg. Właśnie ten nowy jest po utwardzeniu gumiasty. Żywica 30 min Z-poxy firmy ZAP nie ma tego problemu.
-
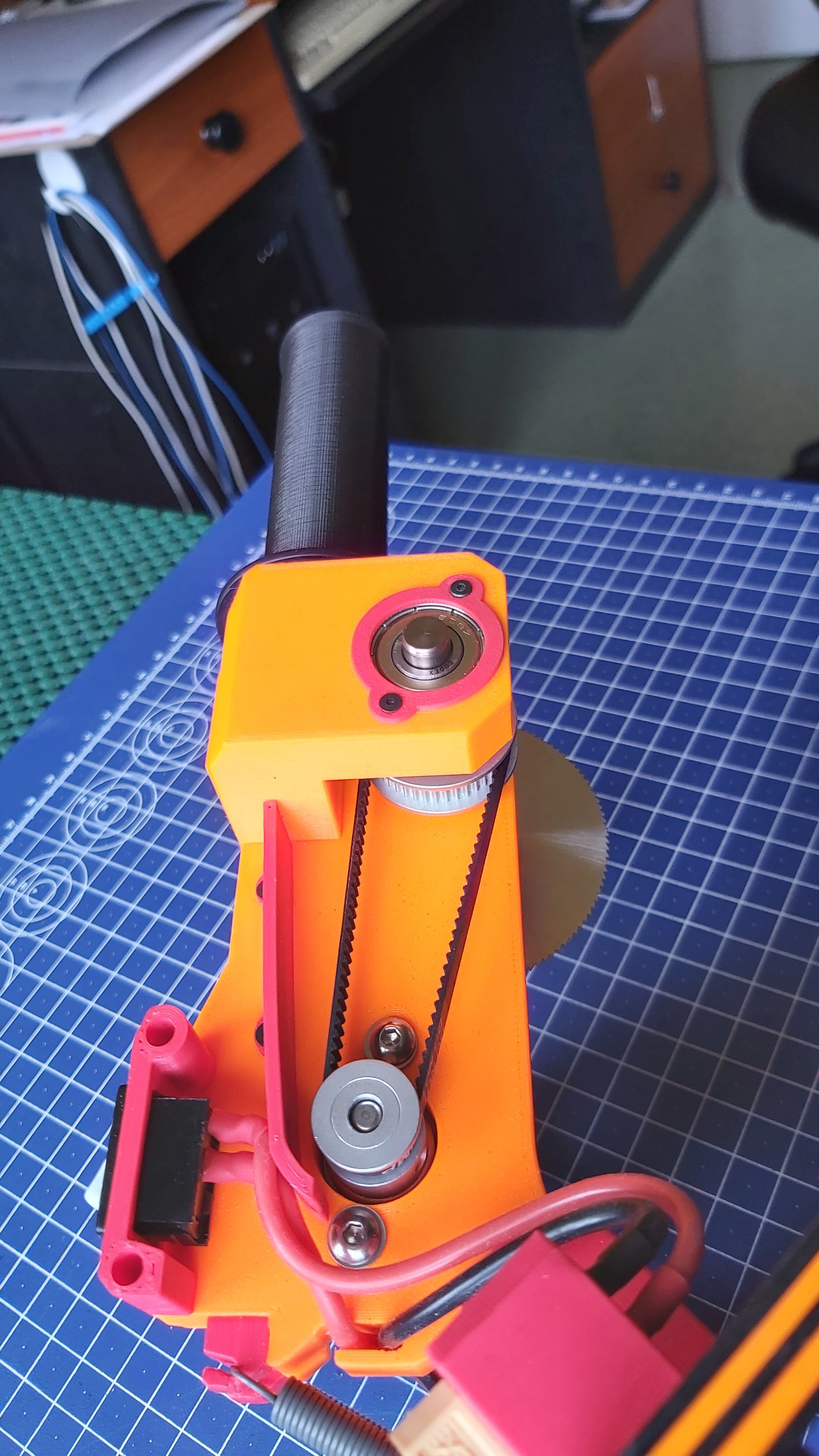
Do podłączenia piły do domowego odkurzacza niezbędna jest tuleja redukcyjna. Właśnie się drukuje.

Dołączam plik tej redukcji z Thingiverse.
Customizer reducing sleeve _ Reduzierhülse 27 to 32 mm - 1698413.zip
Do mojego odkurzacza pasuje idealnie.
Edytuję aby podzielić się praktycznymi uwagami na temat pracy piły. W trakcie cięcia formatek sklejkowych o wymiarach 10cm x 13cm o grubości 1,8mm zaobserwowałem dziwne zachowanie piły.
Przy końcu cięcia czyli gdy cały obwód piły był w ciętym materiale następowało jakby blokowanie się materiału podobne do tego które występuje gdy przykładnica jest nierównoległa do tarczy tzn. odległość między przykładnicą a tarczą na wejściu jest większa niż na wyjściu. Wiadomo, że będzie to blokowało materiał. Jednak w moim przypadku nie to było powodem blokowania się materiału. W trakcie eksperymentów z precyzyjnym ustawieniem przykładnicy za którymś tam razem uruchomiłem piłę bez podłączonego odkurzacza i ku mojemu zdziwieniu problem ustąpił. Przyczyną całego zamieszania było podciśnienie wewnątrz przestrzeni w której pracuje piła. W trakcie cięcia powietrze jest zasysane tylko przez szczelinę w której pracuje tarcza i w momencie kiedy ta szczelina była całkowicie zakryta przez cięty materiał podciśnienie powodowało przyssanie materiału do blatu oraz prawdopodobnie odkształcenie dolnej części tarczy i częściowe blokowanie piły. Rozwiązaniem problemu może być częściowe rozszczelnienie oryginalną, fabryczną przysłonką na rurze odkurzacza co jednak spowoduje słabsze odsysanie trocin. Drugim i chyba lepszym sposobem będzie wywiercenie kilku otworów w grodzi oddzielającej piłę od przestrzeni silnika lub w grodzi która umożliwi zasysanie bezpośrednio z zewnątrz. Gdyby zrobić otwory w grodzi od strony silnika zwiększyłaby się skuteczność chłodzenia silnika. Jakie jest Wasze zdanie?
Dodaję link aby można było zobaczyć jak to wygląda wewnątrz obudowy piły. https://www.rcpano.net/2023/09/13/mini-masa-testeresi-gelistirilmis-yeni-versiyon-yapimi-diy-dairesel-masa-testeresi-v2-0/
-
 1
1
-
-
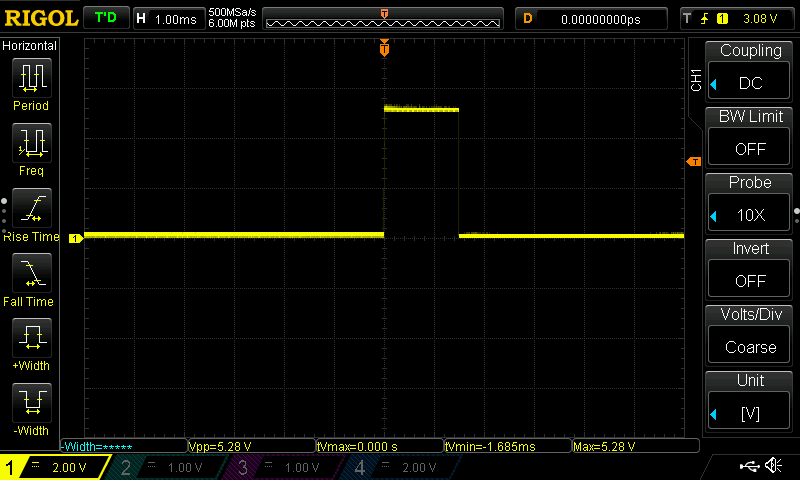
Jarek, jak najbardziej tutaj może być pies pogrzebany i już to sprawdzam. Tester Icharger wystawia sygnał 5,28Vpp. Serwo działa ale tak jak opisałem wcześniej czyli krótkimi skokami naprzód
") . Niestabilne neutrum oraz oba skrajne położenia. Testowałem od 1ms do 2ms z neutrum 1,5ms.
. Niestabilne neutrum oraz oba skrajne położenia. Testowałem od 1ms do 2ms z neutrum 1,5ms.
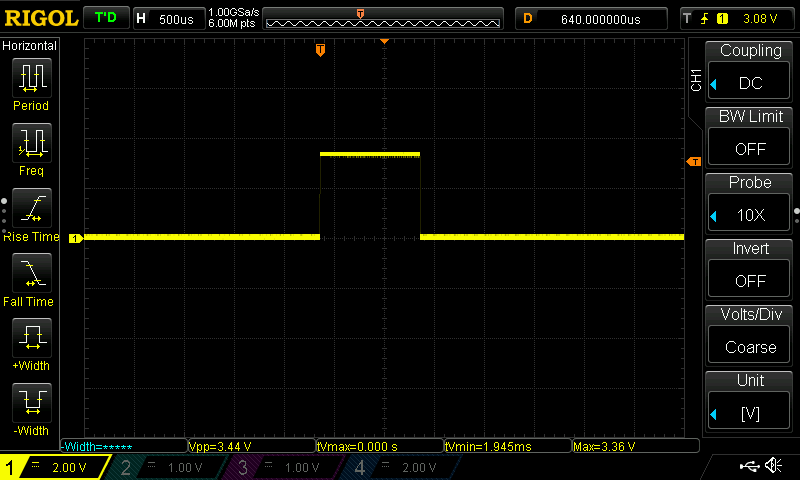
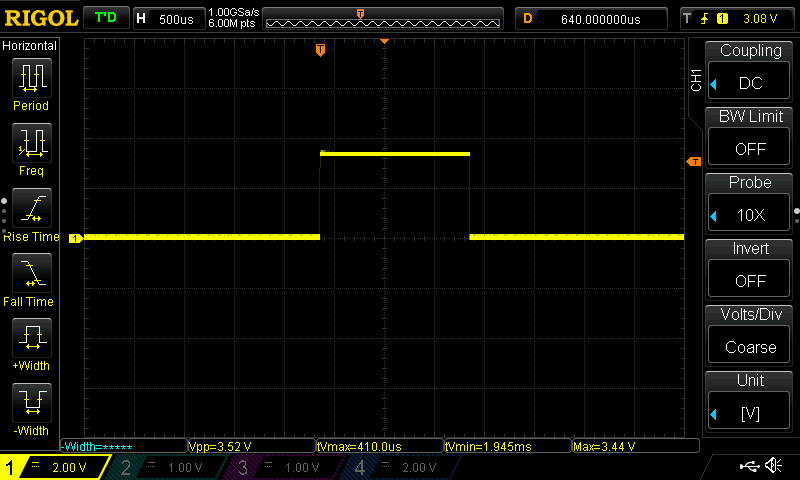
Następny tester to ładowarka Polaron 1400 i tutaj jest zonk. Polaron wystawia sygnał 3,44Vpp i serwo jest martwe.
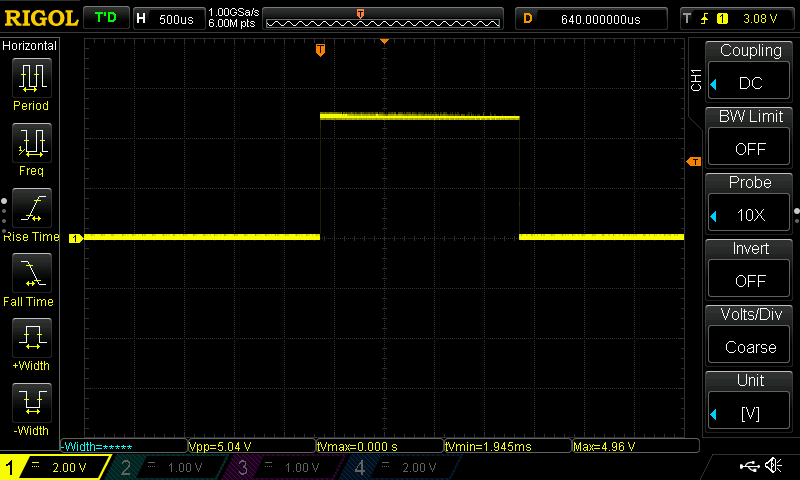
Podłączenie przez revers podwyższa amplitudę sygnału do 5,04Vpp i serwo działa ale identycznie jak na początku czyli kiepsko.
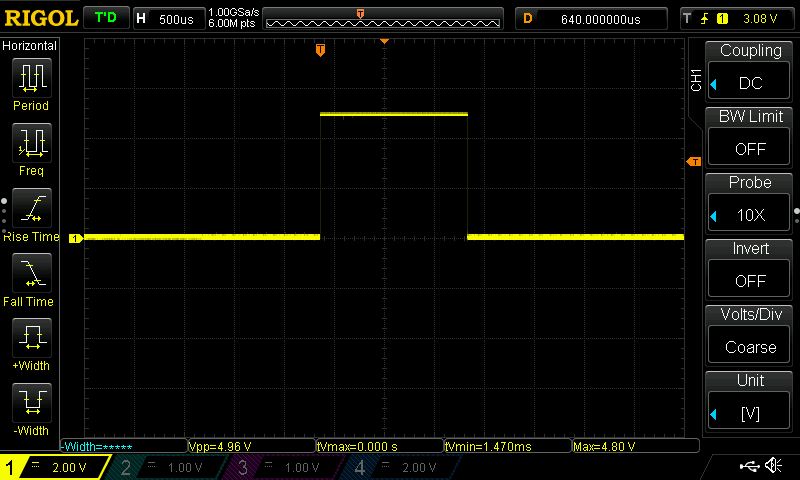
Przemkowy analogowy tester Readytosky wystawia 4,96Vpp i serwo działa jak na początku.
Czyli serwo nie toleruje amplitudy sygnału poniżej 4Vpp. Ponieważ JETI daje coś około 3,5Vpp postanowiłem to sprawdzić.
Z odbiornika JETI REX 7 serwo martwe. Po podłączeniu rewersu serwo ożyło i działa jak wcześniej. Czyli ratunkiem jest zewnętrzny rewers ponieważ on buduje sygnał o wymaganej amplitudzie. Mam na myśli ten konkretny rewers bo z innym może być inaczej. Można pokusić się o dobudowanie układziku regenerującego PWM do wymaganej amplitudy ale wewnątrz serwa nie ma miejsca i jest to raczej gra nie warta świeczki.
Jarek potrafi nakierować i zmobilizować ?.
-
2
-
-
To serwo pracuje w pełnym zakresie tylko jest to praca skokowa i nieprecyzyjna. Dla porównania podłączyłem serwo Hitec.
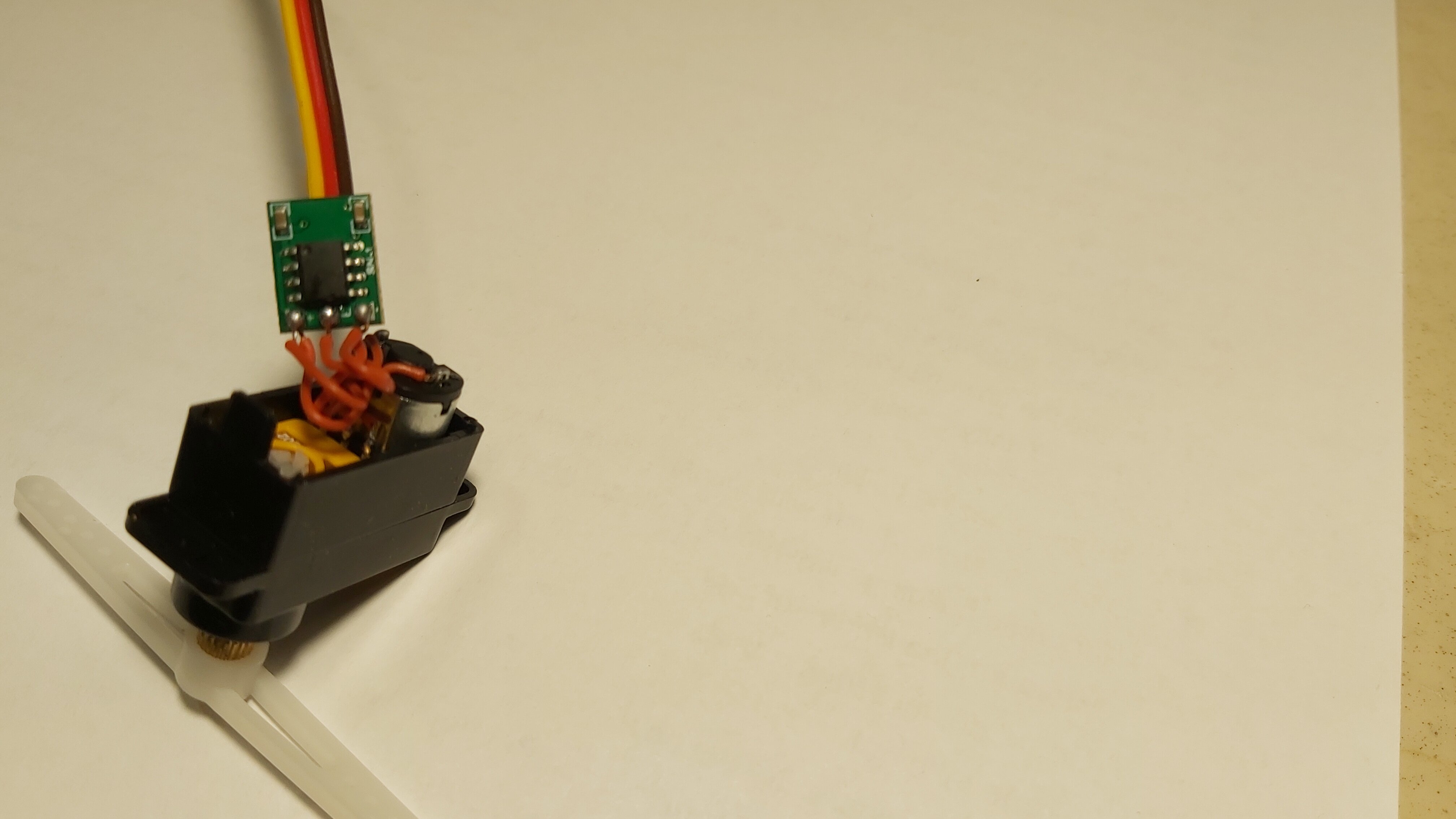
Te wielkie krople bezołowiowego lutu to chiński oryginał. Poprawiłem to ale niestety nie pomogło
.
-
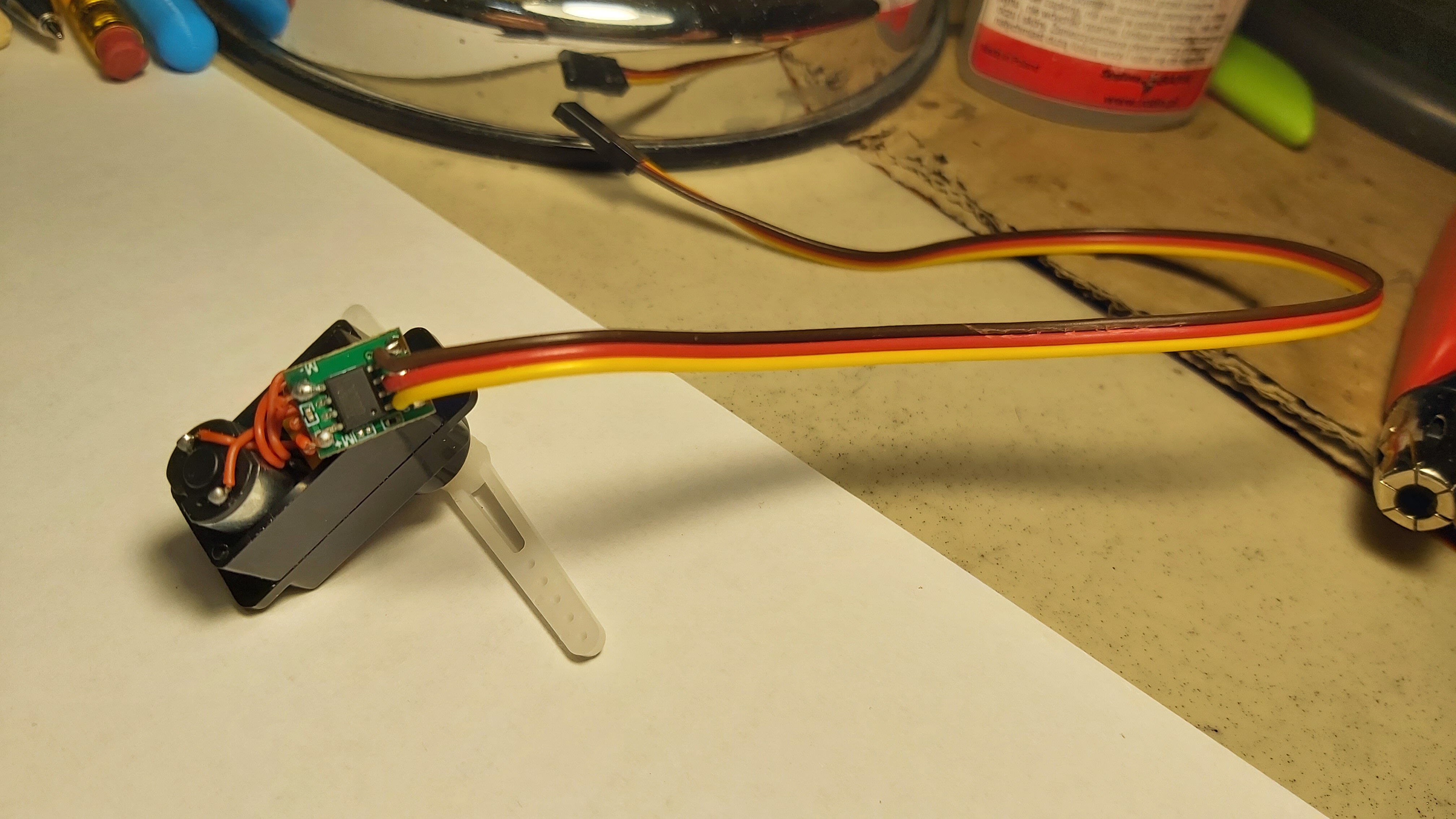
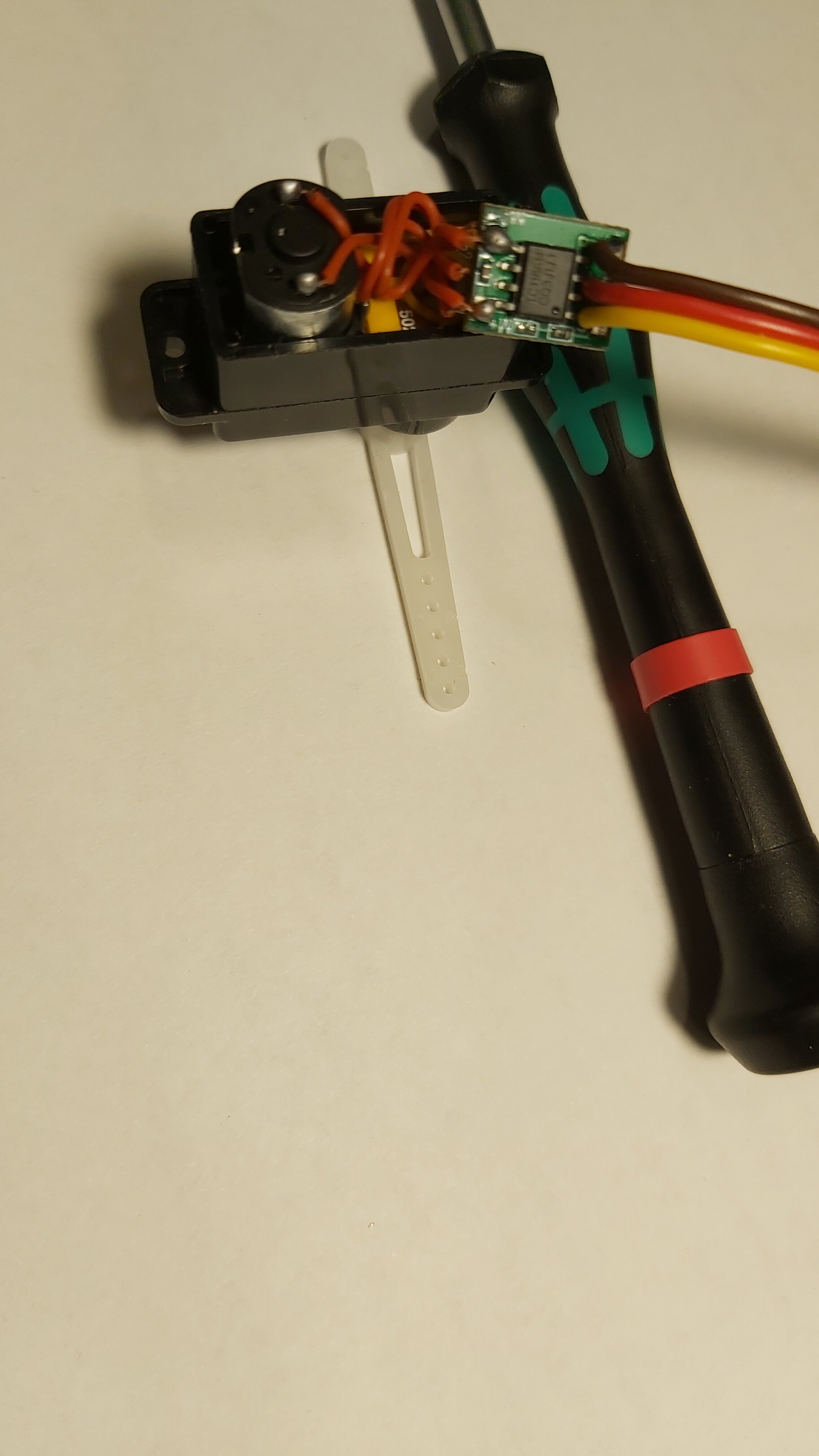
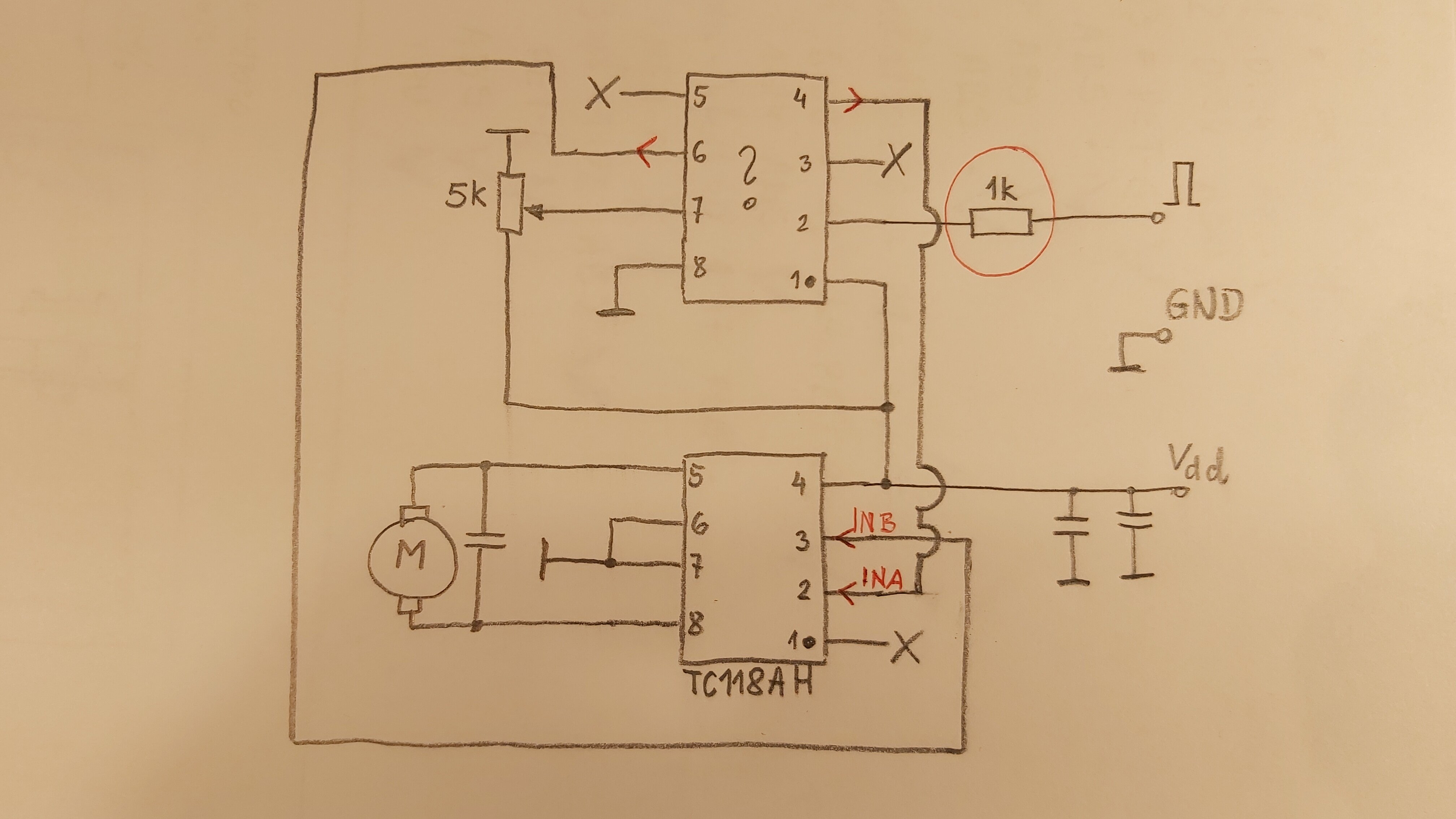
Dotarło do mnie Przemka serwo. Na Przemka testerze Readytosky działa bez zewnętrznego rewersu jak i z rewersem. Działa to znaczy obraca się przy energicznych ruchach potencjometrem testera. Jednak gdy podłączyłem serwo do testera Icharger to mogłem dokładnie prześledzić pracę serwa. Ustawiłem tester do pracy z serwem analogowym z Frame Rate 50Hz i krokiem szerokości impulsu 10 mikrosekund. Okazuje się, że serwo potrafi przespać zmianę szerokości impulsu nawet o 30mikrosekund i dzieje się to nie w każdej pozycji serwa. Raz jest to w okolicy neutrum innym razem bliżej skrajnej pozycji serwa. Porównałem pracę tego serwa do popularnego serwa analogowego Hitec HS81 i HS85. Co się okazuje, serwa Hitec reagują zmianą pozycji orczyka co 2-2,5mikrosekundy. Postanowiłem zajrzeć do wnętrza i naskrobałem schemacik z którego wynika, że w układzie nie ma nic co by mogło zmienić kształt docierającego z zewnątrz impulsu. Impuls dociera przez rezystor 1k do nóżki 2 układu którego opis jest zeszlifowany. Na schemacie ten ze znakiem zapytania. Moim zdaniem niska jakość tych układów jest przyczyną takiej a nie innej pracy serwa. To są serwa do zabawek a nie do modeli latających.
-
1
-
-
Ciekawy jestem czy oba różniące się między sobą wyglądem, działające i nie działające serwo zbudowane jest na takiej samej elektronice. Dobrze by było to sprawdzić.
-
Niebawem się wyjaśni. Mam nadzieję
.
-
Roberta teoria ma sens. Obwód wejściowy każdego serwa musi być w pewnych granicach tolerancyjny na amplitudę oraz kształt sygnału PWM. Przecież odbiorniki różnych systemów i różnych producentów nie wystawiają na wyjściu identycznych sygnałów PWM. Mam ładowarki Icharger w których jest dość rozbudowany tester serw. Może okazać się pomocny.
-
Dzieląc się uwagami przy budowie takich wynalazków można obniżyć koszty oraz czas budowy takich narzędzi przez innych kolegów a oni z kolei odpłacą się nam dzieląc się uwagami przy budowie innych zabawek. Po to między innymi jest Nasze forum. Zamawiając graty do piły ukosowej kupiłem kilka tarcz oraz kilka tulejek mocujących do tarczy piły i teraz tak sobie pomyślałem, że zmajstruję mini piłę stołową, tę z Twojego pierwszego linku. Drukarka już pracuje
.
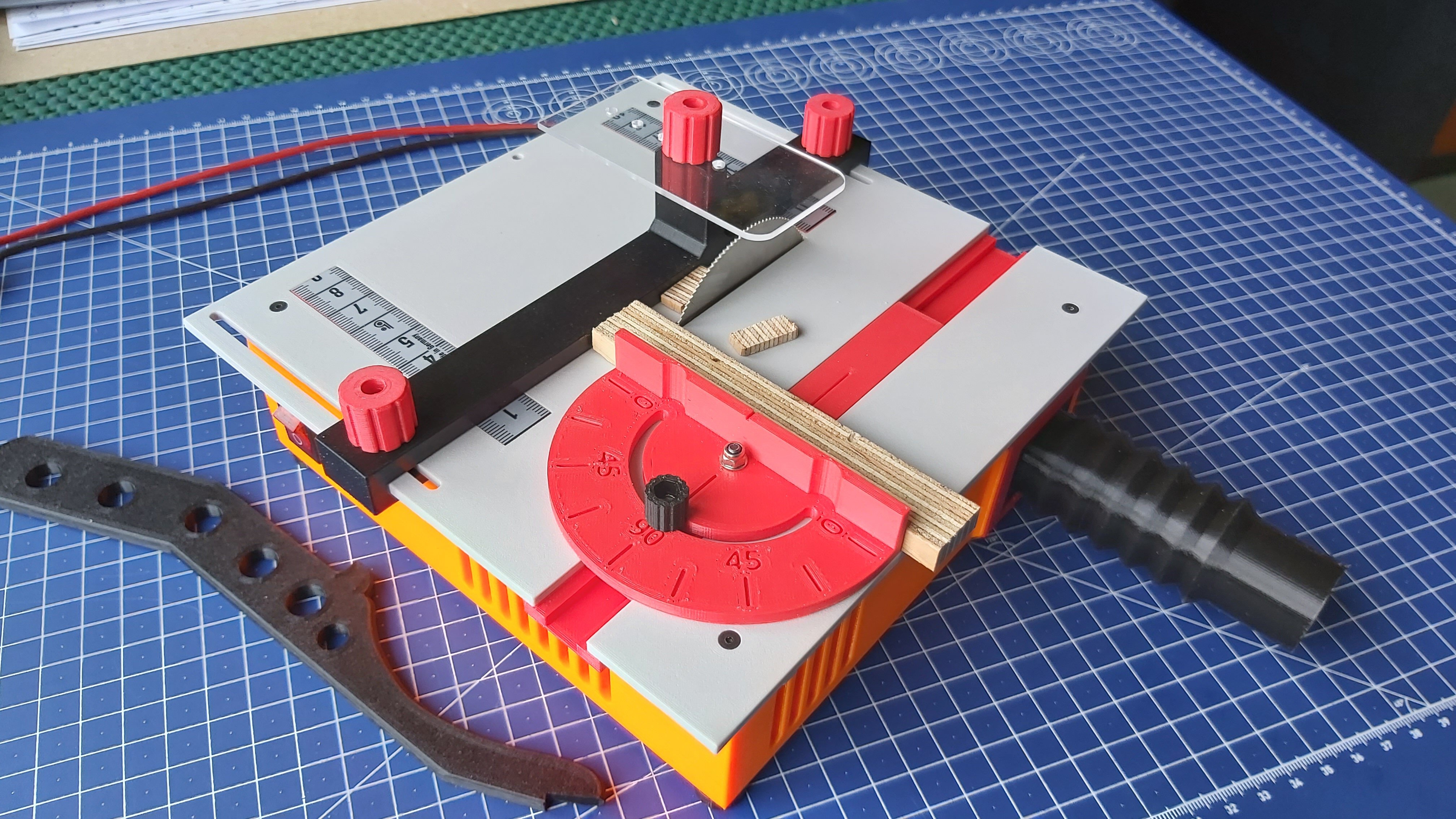
Edytuję aby poinformować, że mini piła stołowa ukończona i działa. Do druku używałem PET-G, easy PET-G, ABS, FiberFlex 40D oraz ABS+. Wyszło całkiem zgrabnie
.
-
2
-
-
Ślij do mnie - chętnie się pobawię
.
-
Ciekawy temat. Można podpatrzyć oscyloskopem jaki kształt i amplitudę sygnału lubią te serwa ( bo polaryzacja to raczej tylko i wyłącznie pozytywowa) . Który z parametrów sygnału decyduje o działaniu lub nie działaniu serwa. Czy jest to kształt (nieodpowiednie czasy narastania i opadania zbocza impulsu), amplituda Vpp czy może składowa stała sygnału PWM. Jak masz "oczko" to może warto sprawdzić.
-
Do tej pory używałem innej drukowanki. Jednak ona nie umożliwiała cięcia pod kątem i była nieporęczna z uwagi na długie wrzeciono w postaci wiertarki.
-
1
-
-
W trakcie używania piły wyszło na jaw drobne niedociągnięcie konstruktora. Stolik po prawej stronie imadła (support-board) jest za wysoki. Imadło (clamp-part-1) na którym leży cięty element ma wysokość 4,4mm a stolik (support-board) ma wysokość 4,6mm. Cięty materiał nie leży poziomo czyli płaszczyzna cięcia nie jest prostopadła. Wydrukowałem nowy stolik zmniejszając wymiar w osi "Z" z 10mm do 9,6mm (łącznie z kołkami ustalającymi) co dało wysokość płaszczyzny stolika 4,4mm. Druga rzecz to zmiana koła z 36T na 40T spowodowała minimalne ocieranie koła o szczękę imadła przy maksymalnym opuszczeniu piły ponieważ koło wystawało poza obrys ramienia około 2mm. Zaradziłem temu przyklejając od spodu ramienia podkładkę dystansową z laminatu epoksydowo szklanego o grubości 2,2mm. Nakleiłem ją w takim miejscu aby niezależnie od położenia kątowego imadła podkładka opierała się na szczękach imadła. Mam nadzieję, że moje spostrzeżenia ułatwią budowę piły i pozwolą uniknąć zbędnych kosztów związanych z zakupem niepotrzebnych elementów. Mam tu na myśli eksperymenty z doborem kół zębatych oraz pasków GT2. Zmiana obu kół na większe ma tę zaletę, że stosujemy pasek o standardowej długości 200mm. Druga rzecz to obroty tarczy które nie ulegają zmianie i są na poziomie około 7500obr/min. w przypadku silnika 15000rpm/24V. Zmiana tylko koła 36T na 40T spowoduje spadek obrotów tarczy to raz a dwa spowoduje konieczność stosowania paska o niestandardowej długości. Na koniec dodam jeszcze, że aby uzyskać prawidłowy kierunek obrotów piły musiałem zmienić biegunowość podłączenia silnika.
-
 1
1
-
-
Drukowałem z wypełnieniem 100%. Materiał ABS oraz PET-G. To jest dobry projekt ponieważ elementy są dobrze spasowane i brak luzów na połączeniu ramię piły - stół. Jak na drukowankę to jestem pozytywnie zaskoczony. Dzisiaj ciąłem rurki węglowe fi8/6 oraz fi10/8 i szło bardzo ładnie.
-
1
-
-
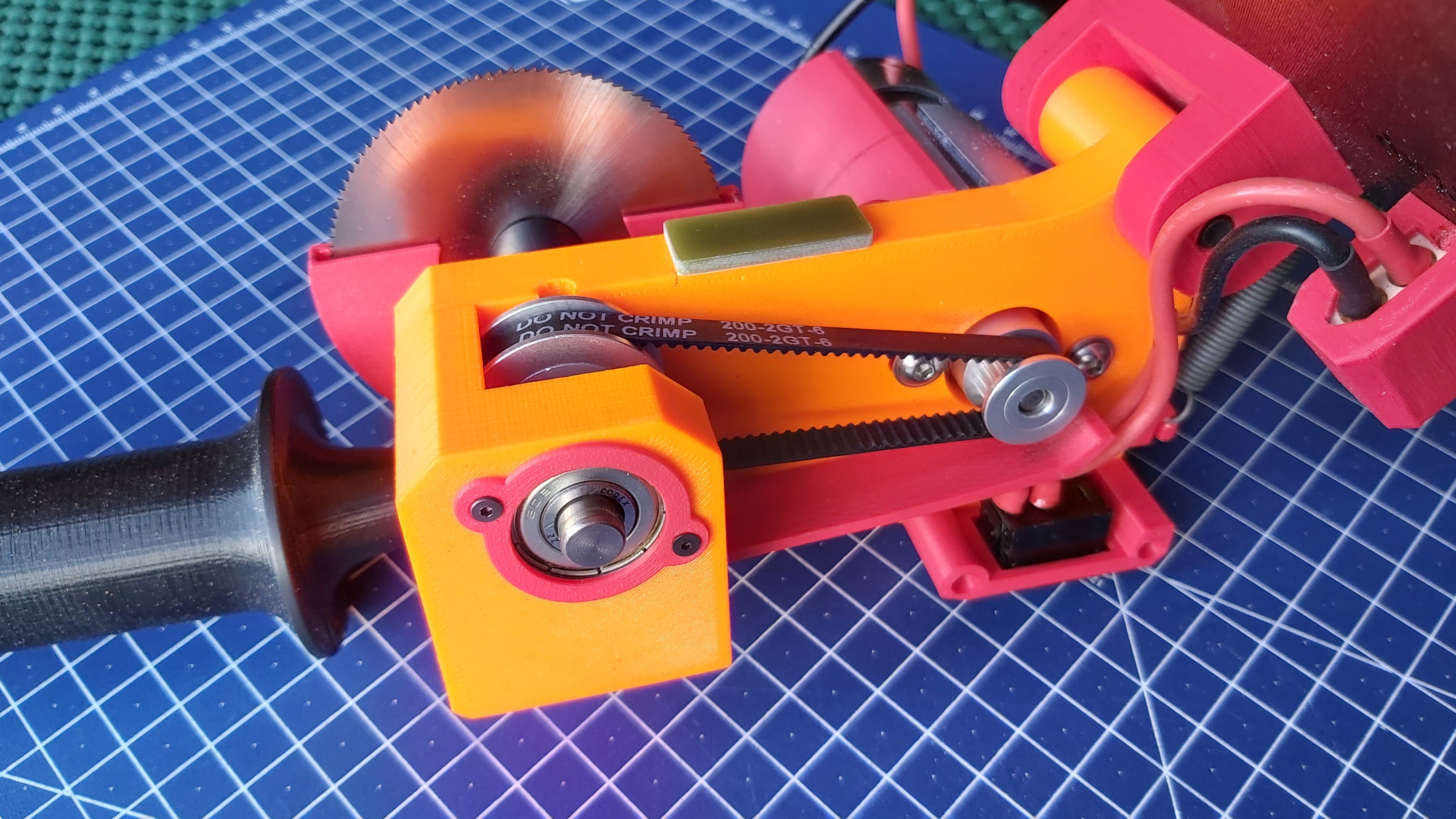
Dzisiaj dostałem koła zębate 20T na wał silnika, 40T na wał piły oraz paski o długości 188mm, 200mm i 202mm. Miałem do eksperymentów dwa koła na wał piły. Jedno 36T i drugie 40T oraz dwa koła na wał silnika. Jedno 16T a Drugie 20T.Robiłem różne kombinacje aby uzyskać możliwość regulacji naciągu któregokolwiek z posiadanych pasków. Idealnie jest z kołem 20T na silniku i 40T na wałku piły oraz paskiem 200mm. Zastosowałem silnik 15000rpm przy zasilaniu 24V i zmierzone obroty tarczy to 7440obr/min. Zarówno koła jak i paski dostępne na A-----o.
-
2
-
-
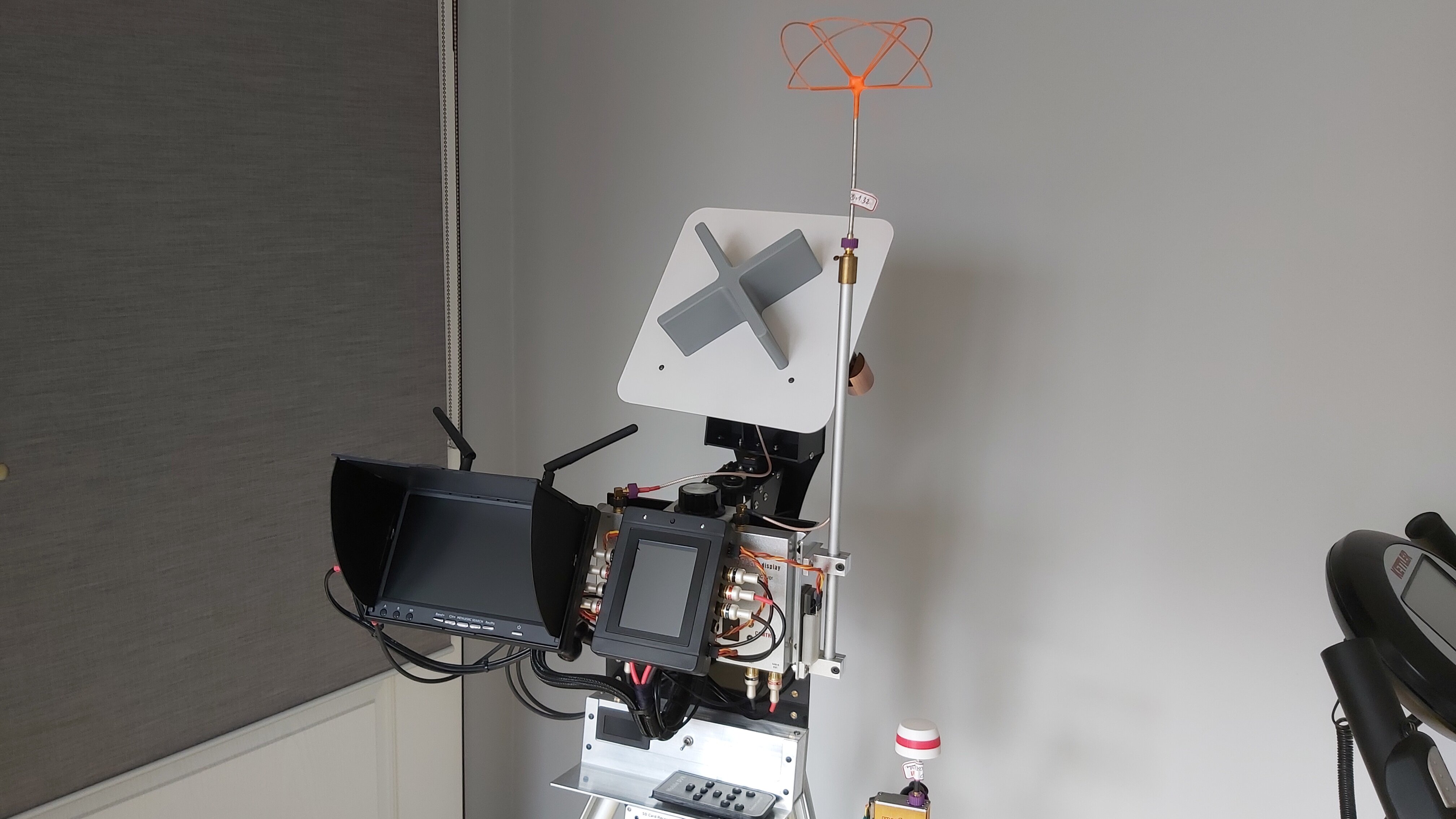
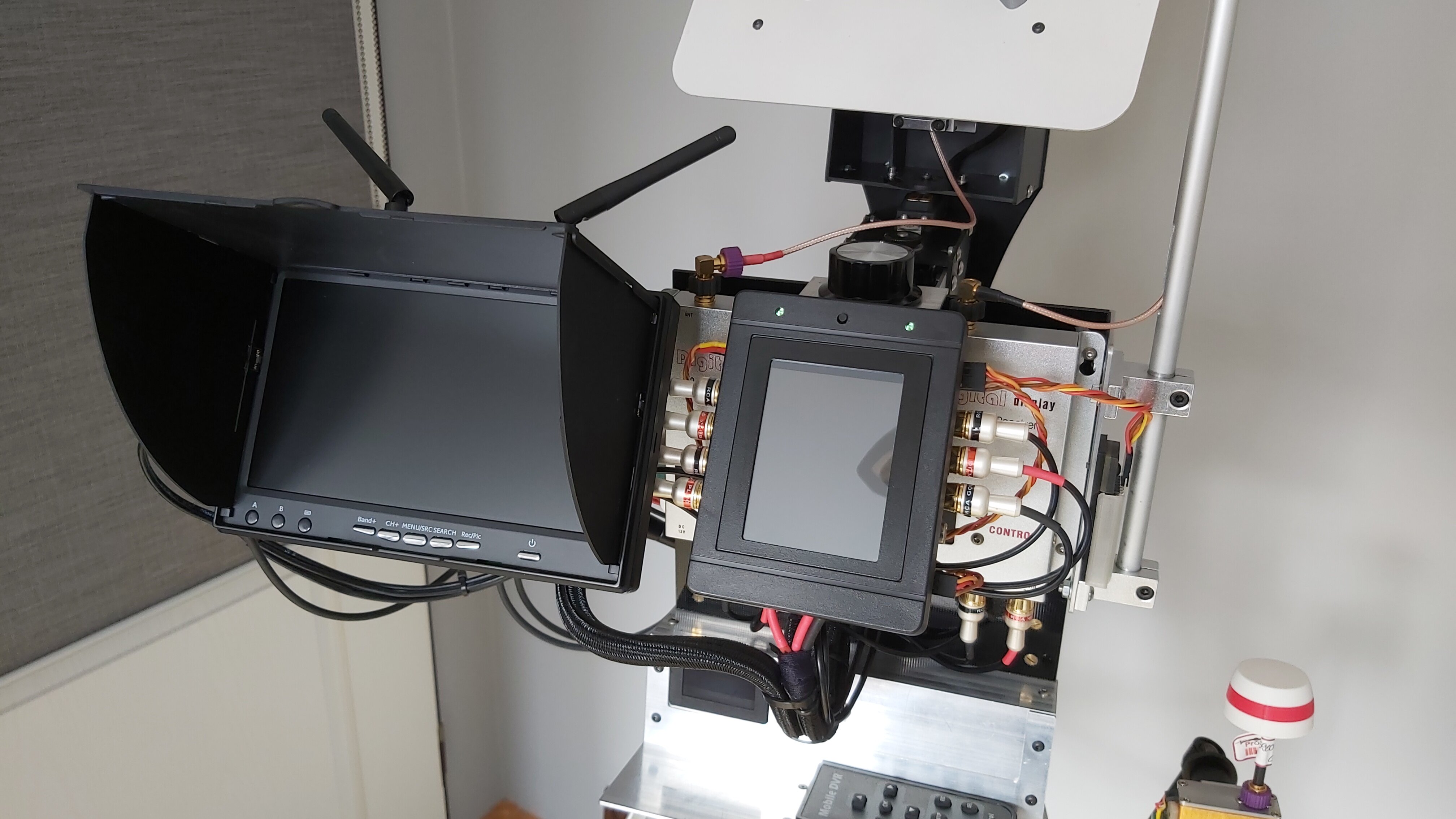
Sercem stacji bazowej jest sterownik firmy PITLAB. Odpowiada on za sterowanie anteną śledzącą oraz układem diversity odbiorników 1,2GHz. Stanowi on również układ syntezy częstotliwości dla obu odbiorników. Strojenie odbiorników odbywa się za pośrednictwem sterownika przez wpisanie częstotliwości na ekranie dotykowym. Oczywiście oba odbiorniki są do tego odpowiednio przystosowane. Do sterownika połączony jest moduł BT dzięki temu można połączyć się z aplikacją TrackMyRC zainstalowaną na smartfonie. Sterownik odpowiada również za dystrybucję sygnałów audio i video.
Stacja wyposażona jest w dwa odbiorniki 1,2GHz w układzie diversity z których jeden połączony jest z obrotową anteną kierunkową typu Crosshair produkcji Prodrone zestrojonej na 1280MHz. Drugi odbiornik pracuje z anteną dookólną typu Cloverleaf produkcji Prodrone również zestrojonej na 1280MHz. Kolejnym elementem stacji jest programowalny nadajnik 5,8GHz TBS Unify Pro który zapewnia retransmisję sygnału do gogli. Nadajnik ten zamocowany jest na ruchomym przegubie. Ponadto stacja wyposażona jest w 7” monitor EACHINE LCD5802D również na ruchomym przegubie z wbudowanym 40 kanałowym odbiornikiem 5,8GHz i ładowarką sieciową wewnętrznego akumulatora LiPo. Dla zapewnienia lepszej jakości obrazu monitor połączony jest przewodowo ze źródłem sygnału AV. Następnym elementem stacji jest rejestrator AV – SD Card Recorder wyposażony w pilot do zdalnego sterowania ( oraz zasilacz sieciowy w komplecie). Konstrukcja anteny obrotowej oparta jest na mechanizmie ZBIG & PITLAB JR65. Anteną obracają dwa mocne serwa na tytanowych zębatkach SAVOX SC1256TG. Mechanizm anteny wyposażony jest w miedzianą przeciwwagę wytoczoną i odpowiednio wyfrezowaną aby zapewnić zrównoważenie masy anteny co zapewnia cichą pracę serwomechanizmów. Serwomechanizmy zasilane są przez układ FOXY UBEC 6A. Dodatkowym wyposażeniem jest potencjometr umożliwiający płynne, precyzyjne ustawienie anteny. Stacja zasilana jest z akumulatora 12V (który nie stanowi wyposażenia stacji) za pośrednictwem specjalnego wyłącznika zbudowanego na tranzystorze MOSFET wyposażonego w wyświetlacz LED. Wyłącznik produkowany przez znanego z forum rc-fpv.pl specjalistę od wszelkiej elektroniki FPV. Wyłącznik czuwa nad napięciem akumulatora zasilającego i kolorami wyświetlacza oraz buzerem informuje o niskim napięciu akumulatora. Przewody zasilające wyposażone w mąsiężne klemy oraz bezpiecznik stanowią wyposażenie stacji. Wyłącznik zabudowany jest we wspólnej obudowie wraz z bezpiecznikami zabezpieczającymi każdy element stacji bazowej z osobna. Stacja zabudowana jest na masywnym aluminiowym statywie fotograficznym wyposażonym w dolnej części w hak służący do kotwiczenia lub balastowania stacji.
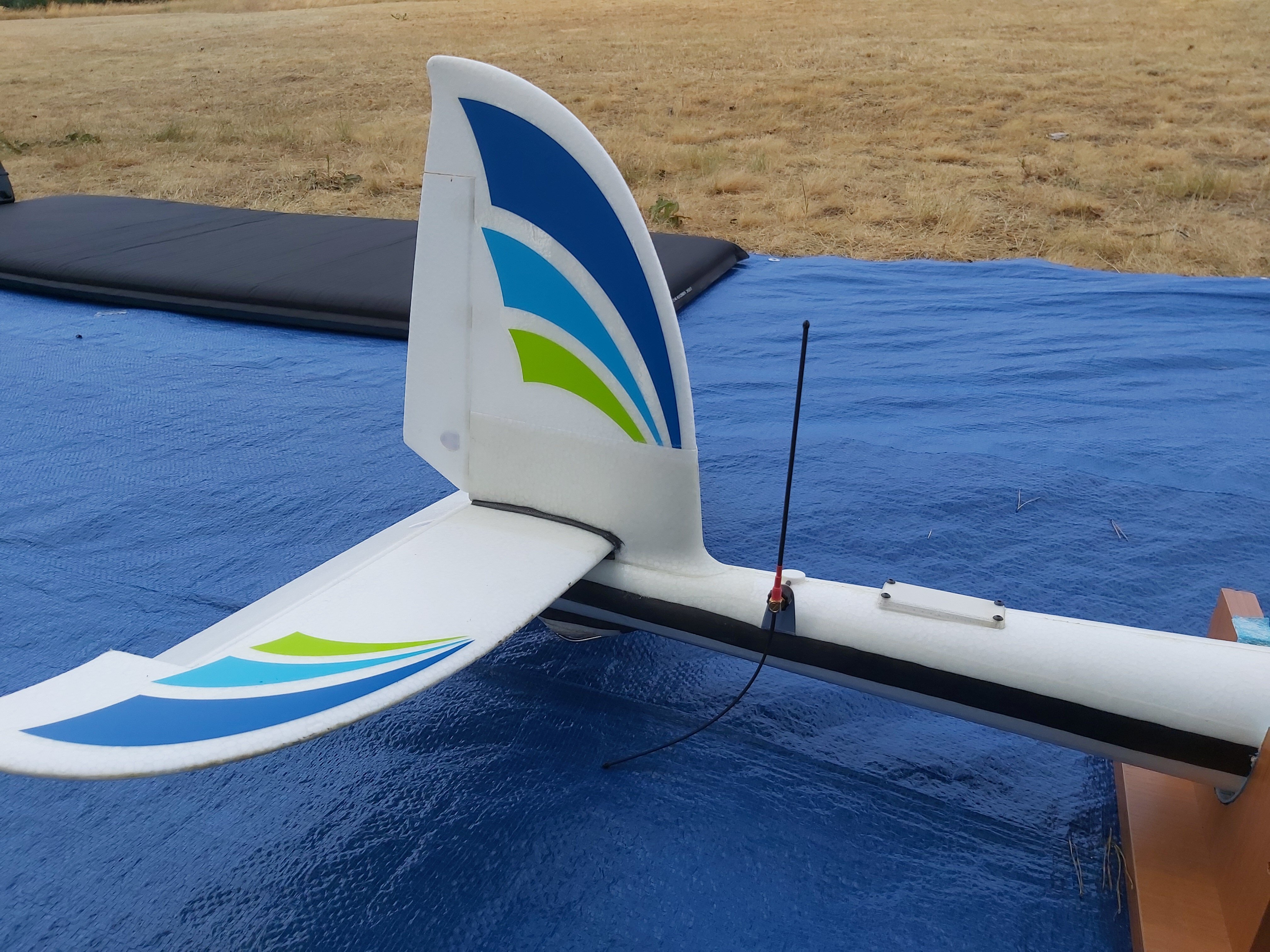
Stacja używana była przez jeden sezon modelarski 2019 i współpracowała z modelem Sky Cruise 2400 wyposażonym w autopilot PITLAB oraz link eLeReS 430MHz. Model ma zabudowane dwie kamery. RunCam Split jako rejestrator HD a druga FOXEER na pantilcie jako fpv sterowana ruchem głowy przez gogle FATSHARK. Dodatkowym elementem całego zestawu jest stacja retransmisyjna sygnału nadajnika Graupner HOTT 2,4GHz na sygnał eLeReS 430MHz która jest zabudowana na lekkim statywie fotograficznym wraz z odbiornikiem telemetrii elDisp wyposażonym w moduł BT i zasilana jest z pakietu LiPo 7,4V. Sprzedam całość lub każdy element zestawu osobno. Pragnę zaznaczyć, że wszystkie elementy zestawu wykonane są starannie, solidnie i z dobrych materiałów. Posiadam pełną dokumentację elementów składowych stacji bazowej oraz modelu Sky Cruise. Odsprzedam całość za 2500zł. Chętnie odpowiem na pytania dotyczące budowy lub parametrów technicznych urządzeń i modelu. Dla nabywcy kompletu gogle FATSHARK gratis.
-
Gdzie kupiłeś taki pasek?
-
Wracając do piły ukosowej. Dostałem od chińczyków piły tarczowe i pozostałe brakujące elementy. Chciałem to dzisiaj skończyć ale okazuje się, że pasek GT-2/200 jest za długi i mocowaniem silnika nie ma szans go naprężyć. Konstruktor zaleca koła 36T oraz 16T, jednak to nie zadziała. Albo zmienię koło 16T na 20T albo kupię pasek 188mm.
-
To jest inrunner więc magnesy są w miarę bezpieczne ale co do reszty to masz rację. Ciężki temat.
-
W dniu 26.01.2024 o 08:01, Slawomir napisał:
Jak nie masz drukarki
To zrób sobie prezent i kup drukarkę. Nie będziesz żałował
.
-
1
-
-
Ledwo zabrałeś się za drukowanie a już masz sposób na reanimację martwej drukarki. Będzie z Ciebie drukarz przez duże D
.
-
Zrobiłbym prostokątną wręgę z laminatu epoksydowo szklanego. Taką, która umożliwi zamocowanie przykręconego silnika w imadle. Następnie metodą lutownicy transformatorowej i grota opasującego obudowę stojana jedną ręką nagrzewał miejsce przedniej flanszy a drugą ręką trzymając silnik , starał się odmontować go od przedniej flanszy. Zdaję sobie z tego sprawę, że to łatwo się pisze i radzi ale na pewno trudniej jest to wykonać. Dużo zależy od tego jak bardzo zdeterminowany jest Tomasz ?.
-
Przykręcenie wręgi o większej średnicy powinno ułatwić demontaż przedniej flanszy.
-
Wysłanie do serwisu to najłatwiejszy sposób rozwiązania problemu. Modelarz przeważnie wybiera trudniejszą drogę prowadzącą do celu i ja jestem zwolennikiem takiego rozwiązania ?. Tomasz, na moje oko to wygląda na to, że obie flansze zarówno przednia jak i tylna są zamontowane na wcisk. Spróbuj rozgrzać obudowę silnika od strony demontowanej flanszy. Można do tego celu użyć lutownicy transformatorowej i zamiast typowego grotu do lutowania zrobić taki grot którym można opasać obudowę silnika w miejscu flanszy. Chodzi o to aby nagrzać w krótkim czasie, tak aby nie zdążyła nagrzać się flansza. Przy użyciu dwóch ostrych narzędzi podważyć flanszę po przeciwnych stronach. Zaznaczam jednak, że ja tego nigdy nie robiłem i nie gwarantuję sukcesu. Myślę jednak, że warto spróbować.










- Poprzednia
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- Dalej
- Strona 2 z 25
Jump 3.6m F5J
w Motoszybowce
Opublikowano
Zrezygnuj z tego serwa. Jest ciężkie, nie jest HV tak jak pozostałe Twoje serwa i najważniejsza rzecz - to jest awaryjne serwo i wiem to z własnego doświadczenia.