






Patryk Sokol
-
Postów
3 201 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
78
Odpowiedzi opublikowane przez Patryk Sokol
-
-
2 godziny temu, TooM napisał:
Koledzy to może pomożecie laikowi, piszczą mi mokre tarcze (podczas deszczu) a na suchym jest OK.
Kwestia klocków.
Jeśli narzekasz na jęczenie tarcz na mokro i nie katujesz roweru po górach to załóż żywiczne klocki.
W mieście są prostsze w używaniu zwyczajnie
-
Zmień font w OSD, choćby według tei instrukcji:
Jeśli nie pomoże - uwalony układ nakładający OSD
-
Hmmm... Dystrybutor był zdziwiony?
Z miesiąc temu kolega dokładnie z tego samego powodu reklamowal ten sam odbiornik u tego samego dystrybutora.
-
Do szybkiego rozładowania Li-Iony się po prostu nie nadają.
-
To jest już docelowy model, to co widzicie będzie w sprzedaży
")
A kiedy? Możesz zadzwonić do AH i zapytać jak to teraz wygląda
-
15 godzin temu, samolocik napisał:
[edit] szkoda tylko, że te ok. 600g do lotu będzie możliwe do osiągnięcia tylko w nielicznych egzemplarzach. Seryjne zawsze ważyły sporo więcej niż deklarowana waga producenta pomimo dużej uwagi przy ich montażu.
E, raczej nie.
Kadłub na ten model wyciągnąłem z kosza w Łodzi z takimi samymi kadłubami, skrzydła powstały całkowicie standardowo, statecznikom też nikt żywicy nie żałował, a dodatkowo model montowałem ja (choć skrzydeł nie lakierowałem, ale to inna inszość) i nawet olałem porady producenta co do doboru pakietu (wolę się słuchać konstruktora).
Niemniej - dla mnie ten model mógłby być cięższy i z radością wrzucę mu nieco balastu. W tego typu modelu nie widzę powodu do walczenia z wagą.
A w ramach bonusu macie cuś takiego:
Czyli jak wyglądało pierwsze kilkadziesiąt sekund w życiu tego modelu. Postaram się coś nagrać w rozsądniejszych warunkach.
-
A ja wiem?
Kapitalizmu tym nie obalam.
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Czołgiem Panowie
")
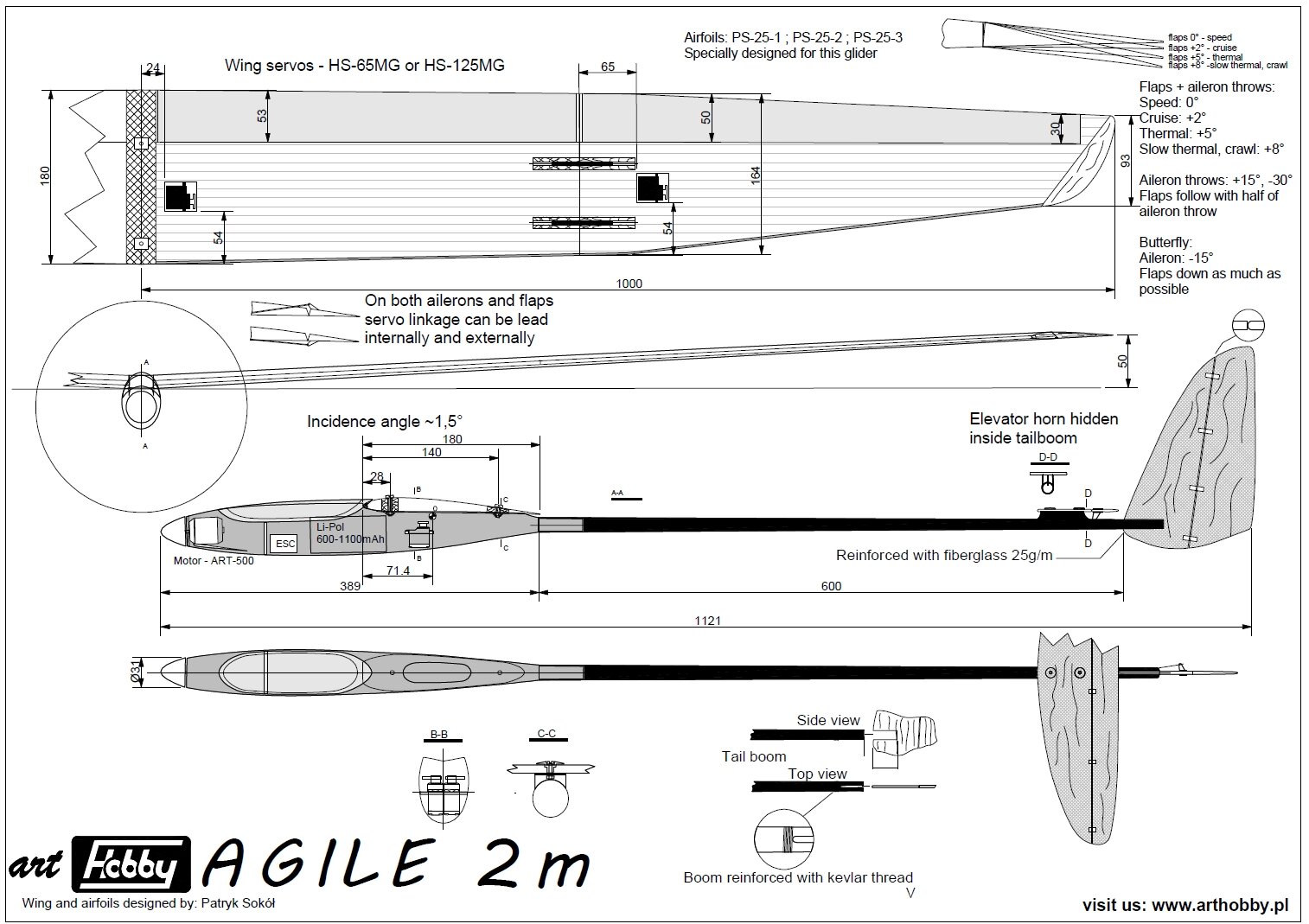
Udało mi się dziś oblatać coś takiego:

Czujne oko, obeznane z rynkiem szybowcowym rozpozna raczej od razu - jest to produkcja ArtHobby.
Jednak, tym razem jest z pewną znaczącą różnicą, którą najlepiej widać na rysunku:
Czyli jest to pierwszy model od ArtHobby zaprojektowany przeze mnie
I nie powiem - jestem z tego układu zadowolony, bo jak bardzo bym nie lubił projektować wyczynowych modeli, to jednak grono ich odbiorców jest mocno ograniczone.
A ArtHobby zasięgi ma zdecydowanie większe, bo i półka cenowa jest, jak i modele prostsze w obyciu.
Sam zaś model powstał jako odpowiedź na to co mnie dręczyło w większości modeli z ArtHobby. Tzn. Pan Jasiński lubował się w konstrukcjach powolnych, majestatycznych itp.
Ja tego podejścia nie uznaje - każdy szybowiec, czy to termiczny, czy zboczowy, czy all-arounder ma mieć zakres prędkości, choćby po to, żeby dolecieć do termiki.
I stąd wynika konstrukcja tego modelu - pełna mechanizacja płata, profil przystosowany pod aktywną pracę klapami (czyli współpracuję z kompletem miksów), szeroki użyteczny zakres klap i profil który bez wychylonych klap jest w ustawieniu prędkościowym (zresztą - na rysunku macie nastawy klap)
Celem było stworzenie modelu który jest i szybki na przelocie i powolny w krążeniu.
I na tę chwilę wiele wskazuje, że założenia udało się wykonać.
Tzn. odkąd prototyp powstał to najbardziej lotna pogoda była dziś.
Więc oblot odbył się wietrze rzędu 12m/s z porywami do 18m/s. Innymi słowy wrony już chodzą piechotą, a tym modelem spokojnie mogłem polatać sobie podstawową akrobację szybowcową i nawet wykręcić jedną termikę. I to mimo niskiej wagi (coś koło 600g do lotu)
I to wszystko z ŚC wyznaczonym na zasadzie "wrzuć pakiet w kadłub i rzuć model w zboże
 " .
" .
Przyznam się szczerze, że dawno mi żaden fornirzak tyle frajdy nie sprawił i nie mogę się doczekać na pogodę która pozwoli na porządną regulację i porządne wlatanie się model.
I na tym póki co współpraca z AH mi się nie kończy, mam dalej sięgające plany.
Nasz następny wspólny projekcik, to będzie model dedykowany do F5J. I tam planuje więcej pozmieniać niż skrzydła i aerodynamika. F5Jtka powinna mieć sporo zmian już na poziomie technologicznym, z nowym bardziej smukłym kadłubem, inną technologią wykonywania stateczników, czy inną belką ogonową.
Oczywiście - cena wciąż jest ważna, więc skrzydła pozostaną jako styro-fornir. Ale na zawody będzie się już nadawać
-
 10
10
-
Jest opacja włączenia go na stałe, wtedy po prostu nie zje kanału
-
Autostart ustaw na stałe. Nie ma powodu by tego nie robić. On i tak uruchamia się tylko na chwilę po uzbrojeniu, nigdy w locie się nie włączy.
W swojej TigrzeFPV mam zrobiona tak, że model moge wystartować na autolaunchu, z włączonym RTH. W efekcie mogę model rzucić, a ten zrobi wysokość i będzie krążyć nad lotniskiem.
-
6 godzin temu, dellorto napisał:
Za waszą radą kupiłem Nazgul 5. Już jest nawet wysłany do mnie z magazynu w Hiszpanii.
Jednak dotarło coś do nie, mimo że Patryk pisze że kV nie ma znaczenia ja uważam że jednak ma. Trochę się zaniepokoiłem że kupiłem 1wszego "wyczynowego" quada z 2750kV... to za dużo...
Spokojnie, będzie dobrze
6 godzin temu, dellorto napisał:O to moje przemyślenia:
1. 2400 kV jest w większości modelów 5" więc ktoś to musiał uznać za coś "uniwersalnego"
Ponownie, nie ma się czym przejmować.
6 godzin temu, dellorto napisał:2. Wyższe kV to mniejsza wydajność. Silnik o dużym kV Przy danym ciagu (thrust) będzie zużywać tyle samo mocy elektrycznej co silnik o mniejszym kV, zmnienia się tylko stosunek napięcie * natężenie, więc niby nie ma problemu... lecz akumulatory tak nie działają. Liczy się w nich tylko pobierane natężenie. Każdy widział pewnie te wykresy rozładowania lipoli, jeśli rozładowujemy je małym prądem to dadzą duże pole pod wykresm czyli dużą ilość energi (Wh), jeśli pociągniemy z nich duży prąd to automatycznie spada na nich napięcie i całkowita energia z nich pobrana będzie mniejsza.
Tak nie działa sterowanie silnikami za pomocą PWMu.
Tzn. regler sterując za pomocą wypełnienia impulsu efektywnie zmienia napięcie jakie podaje silnikowi (bo jak inaczej sterowałby obrotami)?
W efekcie silnik o wyższym kV będzie efektywnie wysterowany niższym napięciem, żeby osiągnąć te same obroty co silnik o niższym kV.
W efekcie moc pobierana będzie bardzo, bardzo podobna, a w efekcie prąd pobrany z pakietu będzie na podobnym poziomie.
To się tyczy oczywiście warunku tych samych obrotów/tej samej mocy oddanej. Na pełnym gazie silnik o wyższym kV weźmie oczywiście więcej i więcej odda
6 godzin temu, dellorto napisał:3. Przy 2400kV miałbym większy moment szczególnie przydatny w średnim i niskim zakresie obrotów, np. lepiej stabilizując przy gwałtownym opadaniu, to chyba przydatne w freestylu/cinematic czyli jak bym chciał latać. Wyższe kV da mi tylko wyższe obroty maksymalne czyli prędkość, która tak czy siak jak dla początkującego była by kosmiczna czy z 2400 czy 2750kV.
To też tak nie działa.
kV to nie przekładnia, nie zmienia momentu jaki ma silnik.
Moment zależy od rozmiaru stojana i magnesów, kV jest całkowicie pomijalne.
6 godzin temu, dellorto napisał:4. Wyższe kV to wyższe piki natężenia prądu przy stabilizacji, więc ubije Li-pola szybciej.
Niekoniecznie.
Wyższe kV reguluje się na inne PIDy (dlatego, że masz wtedy szybszą reakcję na zmianę wysterowania).
Zmiana pików, dla analogiczne tune'a (czyli jeśli quad się podobnie prowadzi) jest totalnie pomijalna. Oczywiście jak dojdziesz do przesadzonych PIDów, to propwash zamorduje lipola bardzo skutecznie.
Ale to się tyczy każdego kV. Jak ktoś nie wierzy, to niech zrobi wysokośc quadem, i strzeli drążkiem (czyli naciągnie na maxa i puści). Pik jest wtedy taki, że na obrazie pojawiają się pasy, a prądy potrafią skoczyć ponad prąd na max przepustnicy.
6 godzin temu, dellorto napisał:5. Poszukałem co internety o tym problemie piszą i znalazłem to https://www.rcgroups.com/forums/showthread.php?2915106-2400kv-vs-2750kv czyli wg gościa strata 10% wydajności przy testach statycznych.
W 10% przy testach statycznych jestem w stanie uwierzyć.
Problem polega na tym, że to test statyczny. W locie 10% bardzo ciężko zauważyć. Większe różnice będziesz miał jak śmigło dotknie trawy i wprowadzi delikatne drgania
6 godzin temu, dellorto napisał:Tak więc, niech ktoś napisze że pieprze głupoty i żebym się nie przejmował, bo na razie się zdołowałem że źle wybrałem pierwszego quada, który będzie krótko latał i zażynał baterie... XD
Jak mówiłem - spokojnie.
Tak dla przykładu - sam latam quadem na 6s, z silnikami 2208 1800kV, co odpowiada 2 700kV przy 4s.
Dorzuć do tego, ze używam pakietów 6s 1300mAh, to zauważysz, że mój quad dobija mocy nieosiągalnych dla większości quadów.
Jakbym latał wciąż na pełnym gazie to pakiet się rozładuje w 60s (eyup - 130A średniego poboru prądu
) i przy odrobinie szczęścia zaspawa XT60 (co mi się przydarzyło, kiedy stwierdziłem, że chce to przetestować).
Mimo tego - ten quad latając freestyle lata średni 3:30 do 5min.
Tu masz np. nieedytowany film:
Latany do 70% pojemności pakietu (900mAh z 1300mAh) na bardzo wymagającej miejscówce (dużo wertykalnych ruchów), gdzie lot trwa 3:20min.
A latany spokojnie, powoli i płynnie spokojnie lata ponad 10min.
Tak naprawdę są dwie wady tak mocnego systemu napędowego:
1. Waga - ale dla mnie nie to nie wada, przy moim stylu lataniu waga pomaga mi w utrzymaniu płynności i energii przy przerzutac i lataniu na plecac. Ale to jest do bólu subiektywne, znam takic co niecierpią mojego quada, a preferują swoje ultralekkie konstrukcje, których ja nie lubię.
2. Regulacja - wymaga ona nieco więcej uwagi. Tzn. łatwiej quada przesterować, a przesterowany jest naprawdę brutalny dla sprzętu. Ale to naprawdę nie jest bardzo skomplikowane i nawet defaulty nie są niebezpieczne, szczególnie gdy mamy dwukierunkowego DSota
A zalety?
Fantastyczna reakcja na propwash, dlatego, że momentu w dole jest pod dostatkiem, fantastyczna reakcja na przyczepienie o coś (też efekt dużego momentu i dużej max mocy) i duży zapas mocy w górze przepustnicy.
Ogólnie - pełnego gazu nie używam nigdy w normalnym locie, jedynie w sytuacjach awaryjnych. A tych jest bez liku i wielokrotnie tak duży zapas mocy ratował mnie przed solidną glebą.
W dużym skrócie - wyluzuj
-
52 minuty temu, solainer napisał:
Może trochę gruba ale chyba ktoś to policzył projektując model.
To bywa bardzo grube założenie
I nawet nie mówię tu o darmowych planach.
52 minuty temu, solainer napisał:subiektywnym (...) wydaje mi się (...)
I tu masz słowa klucze.
Mi też się wydaje, że będzie latał, ale doświadczenie mnie nauczyło bardzo bolesnie, że to co mi się wydaje znaczy bardzo mało.
Dlatego chcę ten model szybko przeliczyć, żeby zamienić subiektywne odczucie i wydawanie na konkretne dane.
Wierz mi - tak jest taniej.
-
14 godzin temu, solainer napisał:
Wydaje mi się że użyto grubego prawie symetrycznego profilu aby uzyskać dużą nośność i względnie niewielką szybkości nie tracąc stateczności. Na moje oko będzie fajnie latał.
Przecież tak to nie działa.
Symetryczne profile produkują znacząco mniej siły nośnej, niż profile asymetryczne i zastosowanie takiego zawsze będzie skutkować mniejszym maksymalnym współczynnikiem siły nośnej, niż jakbyś zastosował asymetryczny.
Dodatkowo - zastosowanie czegoś z tak cofniętym punktem największej grubości wręcz gwarantuje tendencję do paskudnego przeciągnięcia. Dlatego wciąż sugeruję koledze, żeby podrzucił skan planu, żebyśmy to sprawdzili.
I zanim powiesz - akrobaty wcale nie latają na tak dużych współczynnikach siły nośnej jak się wydaje, mają po prostu dużo powierzchni nośnej.
-
W dniu 28.09.2020 o 23:57, kulfon250 napisał:
Witam,
a ja mam pytania, bo też o tym myślę, ale to coś nowego dla mnie:
- widzę że jest nowy model F765-WING, czy warto go kupić zamiast 522-WING.Podobno to jego poprawiony następca. Ale wiem też że nie zawsze nowsze jest lepsze, jaka jest Wasza w tym temacie opinia?
Jeden dziad. Tzn, jeśli byś potrzebował 765 to byś wiedział, że potrzebujesz 765
Jedyny haczyk - musi wystarczyć Ci wyjście na 8 serw
W dniu 28.09.2020 o 23:57, kulfon250 napisał:- Czy tego typu kontroler + iNav można zastosować jako stabilizacja i kontrola lotu do dużych modeli elektrycznych, np. 2.7m 9kg?
Można, zobacz jak stosuję to np. tutaj:
Aczkolwiek - 9kg to dużo. Ja bym się neico stresował, parę już takich FCków spaliłem
Kupować do tego musisz tylko GPS, reszta jest wbudowana
44 minuty temu, Marcin napisał:Jutro powinno się pojawić okno pogodowe więc dla pewności checklist.
1. Lot full manual i sprawdzenie wytrymowania w locie poziomym z prędkością przelotową (pewnie jakieś 50% gazu)
2. Przeniesienie trymów mechanicznie na popychacze, trymy w radiu na zero
3. Lot w acro i procedura Auto Tune.
Może tak z grubsza być. Ale nie musisz grzebać w mechanice, neutrum serwa można ustawić z poziomu OSD
44 minuty temu, Marcin napisał:4. Lot w angle / horizon (który?) i sprawdzenie zachowania modelu, ewentualne zmiany kątów w board alignment - jak opada, to dodać pitch, jak leci w jakąś stronę to roll dodać lub odjąć (Patryk, wg tego co pisałeś to niepotrzebne, jeśli będę używał altitude hold?)
Horizon to tryb angle w którym powyżej pewnego wychylenia model robi beczkę.
Zalet ma dokładnie zero i należy go zakopać.
W samolocie tryb angle ma sens tylko w połączeniu z altitude holdem, inaczej to nie ma sensu
-
Eachine jest fajny, jeśli nie spali się przy pierwszym podłączeniu pakietu. Niestety - track record tej firmy jest średniawy.
iFlighty są zdecydowanie solidniejsze. Sporo ich elektroniki używam i naprawdę dzielnie znosi to co im robię.
Z reglem sprawa generalnie jest taka, że zawsze polecam brać regler na BLHeli-32, bo niewiele się do niego dopłaca, a parę rzeczy ułatwia.
Jednak - BlHeli-S można obecnie zastąpić firmwarem JESC (za parę dolarów wprawdzie, ale jednak). W efekcie regler na BLHeli-S również oferuje wtedy dwukierunkowego Dshota (podaje FCkowi jak szybko silnikami kręci) i w efekcie w locie nie ma opcji żebyś odróżnił BLHeli-S od BLHeli32.
Niemniej - te parę dolarów to różnica w cenie między reglem na BLHeli-32 i BLHeliS, więc kiedy wybór jest to nie warto się w to bawić.
Silniki zaś to inna kwestia.
Jeśli kupujesz pierwszego quada (a to Twój pierwszy taki quad, bo 450tka to inna para śmigieł), to totalnie olej kwestie rozmiaru, kV, koloru, czy czegokolwiek. Tak długo jak kupujesz współczesny silnik quadowy, tak długo pierwsze dodanie gazu wgniecie Cię w fotel
Dlatego interesuje Cię solidność silników, bo tłuc to tym będziesz częściej niż się spodziewasz (szczególnie jeśli poczujesz bluesa i zaczniesz latać freestyle).
I tutaj - iFlight wygrywa o cztery długości ramy - silniki iFligta to top klasa wytrzymałościowa. Zarówno w high endzie (uwielbiam swoje Xingi 2208 ❤️ ), jak i w klasie niższej (czyli te Xingi-E).
Stąd ja bym wziął iFlighta pewniejszy sprzęt jest to po prostu.
-
Godzinę temu, japim napisał:
Patryk - główny profil wygląda jak symetryczny. Wątpię aby prawdziwy Aviocar będąc samolotem transportowym miał taki profil...
EDIT: sorry - cofam. Chyba ma symetryczny

Dokładnie tak samo się nabrałem
Niemniej - profil w modelu wygląda zadziwiająco podobnie do pełnowymiarowego samolotu. Sprawdziłbym jak to się zachowywać będzie, tak dla spokoju.
-
A ok, jak robisz z planów to stateczniki powinny być ok.
Tzn. martwiłem się, że po prostu przeskalowałeś pełnowymiarowy samolot, a to jest zawsze recepta na katastrofę (samoloty mają mniejsze stateczniki niż modele powinny mieć).
Martwi mnie za to profil jaki masz w tym modelu, bo absolutnie nie wygląda jak coś co byłoby jakoś specjalnie nośne przy takiej liczbie Reynoldsa. Trochę się obawiam, że jest to profil z pełnowymiarowego samolotu, który autor planów tu wstawił.
Przy tym rozmiarze latać tu będzie, ale boję się, że charakterystyka przeciągnięcia będzie aż nadto makietowa.
Jeśli wrzucisz skan tego profilu z planów (albo jak masz go w formacie wektorowym), to mogę sprawdzić jak to się będzie zachowywać, tak w ramach pochwały dobrego rzemiosła
-
Katy w angle mają wpływ na os lotek i os steru kierunku.
Dla osi steru wysokości ma to znaczenie w quadzie, gdzie za trzymanie wysokości odpowiada bezpośrednio przepustnica.
-
Tak.
Jeśli chcesz poeksperymentować z prędkością przelotową to zainteresuj się tym:
https://github.com/iNavFlight/inav/blob/master/docs/Inflight Adjustments.mdPozwala to przestawiać stałe parametry w locie.
To co Cię interesuje to parametr NAV_FW_CRUISE_THROTTLE
Jęsli masz włączoną stabilizację i masz włączone utrzymywanie wysokości to przestawiając ten parametr zmieniasz zadaną przepustnicę.
Dzięki włączonej stabilizacji wysokości to dla każdej przepustnicy znajdzie sobie taki kąt natarcia, zeby nie opadać i się nie wznosić, więc będziesz miał różną prędkość.
Warto sobie jeszcze wrzucić na OSD parametr mAh/km żeby określić która przepustnica odpowiada maksymalnemu zasięgowi (pamiętaj tylko, że iNav ma prędkość z GPSa więc do tej kalkulacji bierze pod uwagę wiatr)
-
Nie będzie trzymał takiego kąta przecież.
Autopilot w iNavie działa tak, że ustala Ci zadaną przepustnicę i tak dobiera kąt natarcia, aby model nie opadał.
Dopiero na wznoszeniu wchodzi pomiar kąta, żeby domiksować wysokość.
-
Tak na wszelki wypadek - jaki profil skrzydła i jak dobrałeś powierzchnię stateczników?
-
13 godzin temu, Marcin napisał:
Dzięki
Przeniosłem trymery z aparatury na mechanikę bezpośrednio popychaczami, więc aparatura na zero, lotki obie odrobinę idą w górę - jak to w skrzydle.
Mam tylko problem, bo aparatura już nie trzyma dobrze neutrum, jak odbijają się drążki to potrafi przeskoczyć zero i lotki zostają czasem raz w górze lekko a raz w dół - do kitu, jeśli chcę ustawić model mechanicznie na zero do lotu.+
To najgorsza rzecz latać na takiej aparaturze.
Jakby mnie ktoś zapytał, czy wolę latać na takiej aparaturze, czy cios młotkiem w czoło to brałbym latanie na tej aparaturze jednak. Ale zadowolony bym nie był.
13 godzin temu, Marcin napisał:GPS - wiesz, kwestia ustawienia wysokości powrotu, kątów i prędkości lotu itp. Ale to później, niech on na razie normalnie poleci.
To parametry autopilota, nie GPSa
13 godzin temu, Marcin napisał:EDIT:
Z drugiej strony, jeśli to aparatura trochę sieje, ale sam INAV jest precyzyjny i to w sumie on steruje całym lotem, to lot w acro nie powinien być problemem - RC Deadband zabezpieczy przed szumem z nadajnika a model będzie leciał stabilnie.
Tylko w trybie stabilizacji. W manualu będzie uciekał to w jedną to w drugą.
Upewnij się, że luz jest na aparaturze (tzn. w zakładce Rx będzie odczyt pozostawiać po róznych stronach), a nie na serwie
-
2 godziny temu, Marcin napisał:
Po pierwsze czego oczekuję - będę latał 90% w manualu (nie widzę różnicy między nim a acro, ale jeszcze doczytam)
Acro działa jak sterowanie quadem. Tzn. sterujesz nie wychyleniem, a prędkością kątową. Ma to taki skutek uboczny, że kiedy drążki są w zerze, to iNav automatycznie gasi wszystkie odchylenia (bo ma mieć zerową prędkość kątową, a jest niezerowa).
W manualu zaś serwa dążą za drążkiem.
Przydatność acro w samolotach się waha. Tzn. typowe skrzydło do FPV jest tak mułowate, że nic to nie daje, zaś w moim Funjecie FPV to powoduje,że model leci jak po sznurku i trzyma każdy kąt jaki zostawiłem. Tzn. kiedy ustawię 40st wznoszenia, to będzie tak trzymał. Ale Funjet ma dużo mocy, mały moment bezwładności i szybkie serwa.
2 godziny temu, Marcin napisał:Chcę też mieć, bo teraz mam i bardzo mi się to podoba, wspomaganie startu w systemie wyrzucam model, on odpala silnik a następnie krąży nad miejscem startu do przejęcia kontroli nad nim.
To jest fajna funkcja, ale uruchamiaj dopiero po wyregulowaniu modelu. Inaczej może być zabawnie.
2 godziny temu, Marcin napisał:Co chyba wiem - najpierw model w manualu musi lecieć prosto na prostych drążkach, więc trymowanie. Autotrim jest chyba pierwszą pozycją - to mogę zrobić nawet bez lotu, bo aktualnie mam model wytrymowany, więc w sumie mógłbym autotrim zrobić na ziemi - postawić wytrymowany model bez ruchu, odpalić autotrim, poczekać 2/3s, disarm i tyle.
Autotrim jedyne co robi to przepisuje pozycje zerowe serwomechanizmów i nie jest konieczny, żeby model latał dobrze.
Mechanizm autotrima jest taki, że przepisuje pozycje zerowe serwomechanizmów na takie jakie są obecne wychylenia. Tzn. w trybie acro model będzie dążył do zerowych prędkości kątowych (na niewychylonych drążkach) i takie pozycje zapisze do serw.
W manualu - wpisze Ci to co sam wychylisz na drążku (tzn. trzymasz drążek w lewo, bo model ucieka w prawo, włączasz autotrima i model zaczyna uciekać w lewo, bo neutrum się przesunęło).
W angle/horizonie - podobnie wrzuci Ci to co ma do lotu poziomego.
Niemniej - jeśli model nie jest jakoś wybitnie krzywy, to autotrim zmienia cokolwiek jedynie w manualu. W innych trybach regulator PID sam to ogarnie.
Dodatkowo - autotrim ssie...
Tzn. może np. wytrymować model w trawers (czyli SK w lewo, lotki w prawo i model leci po prostej, tyle, że zjada o połowę więcej prądu).
No i potrafi być debilnie nieprecyzyjny.
Suma summarum - sam używam autotrima jedynie do punktu wyjściowego. Później ręcznie poprawiam pozycję serw podpinając model pod USB.
2 godziny temu, Marcin napisał:Pytanie - czy lepiej wytrymować model mechanicznie na popychaczach i mieć radio na 0 czy mogę zostawić trymy w radiu, autotrim i potem jak to działa - w manualu trymy z radia zostają jak były a w trybach autonomicznych iNav ignoruje trymy i używa tego, co nauczył się z autotrimu?
Radio ZAWSZE ma trymy na zero. Zerowe ustawienie drążka zawsze ma pokrywać się z 1500us w zakładce receiver w iNavie.
Jeśli cokolwiek potrymujesz w radiu, to w efekcie jak włączysz tryb stabilizacji, bądź acro to model zawsze będzie gdzieś uciekał, bo odcylenie od pozycji zerowej iNav zinterpretuje jako wychylenie drążka (bo przecież nie ma jak odróżnić czy pozycję kanału przesunąłeś drążkiem czy trymem). Pozycje serw (i wychylenia) poprawia się jedynie pod iNav configuratorem.
To oczywiście dla prostego modelu. Np. w moim Jantarze jest milion miksów bezpośrednio podpinanych do serw.
Działają one tak, że kiedy zmieniam tryb lotu, to są one wyłączane i radio zachowuje się już tak jak iNav tego oczekuje.
2 godziny temu, Marcin napisał:Potem Autotune, też fajnie opisany, trochę trzeba powariować w powietrzu.
Autotune to pierwsze co robisz po regulacji modelu. Szkoda czasu na latanie bez autotune'a
2 godziny temu, Marcin napisał:I to powinno wystarczyć na początek, żeby model w trybie stabilizacji leciał samodzielnie prosto, no nie?
Potem mogę się zabrać za parametry GPS pod RTH?
Jakie parametry? Wag GPSa nawet nie tykaj, nic Ci to nie da
-
Na razie wciąż nie mam blachy mocującej silniki do montażu, bo ciężko się dopchać do lasera w robocie
Ale za to dotarł do mnie inny element mojego zestawu do guidingu, czyli kamera ZWO ASI120MM mini.
Low-endowa kamerka planetarna, która ma być wręcz idealna do guidungu ze względu na wysoką czułośc.
Lunetki do guidingu też jeszcze nie mam, więc zostala mi tylko jedna rzecz do zrobienia.
Pofotografować planety
W tym celu praktycznie od razu z poczty pojechałem na Pałacową ze sprzętem i...
I zamiast fotografować to utknąłem z obserwacjami wizualnymi, bo tak dobrego seeingu jak miałem o zmroku wczoraj, to nie miałem odkąd posiadam mojego 10" Newtona.
Nawet z okularem 9mm i soczewką Barlowa obrazy miałem idealnie ostre. Tak kosmatego Jowisza, to jeszcze na oczy nie widziałem
Niemniej - kiedy się zebralem do fotografii, to Saturn był już sporo niżej, zrobiło się mgliście itp.
Wyniki jakieś tam jednak mam.
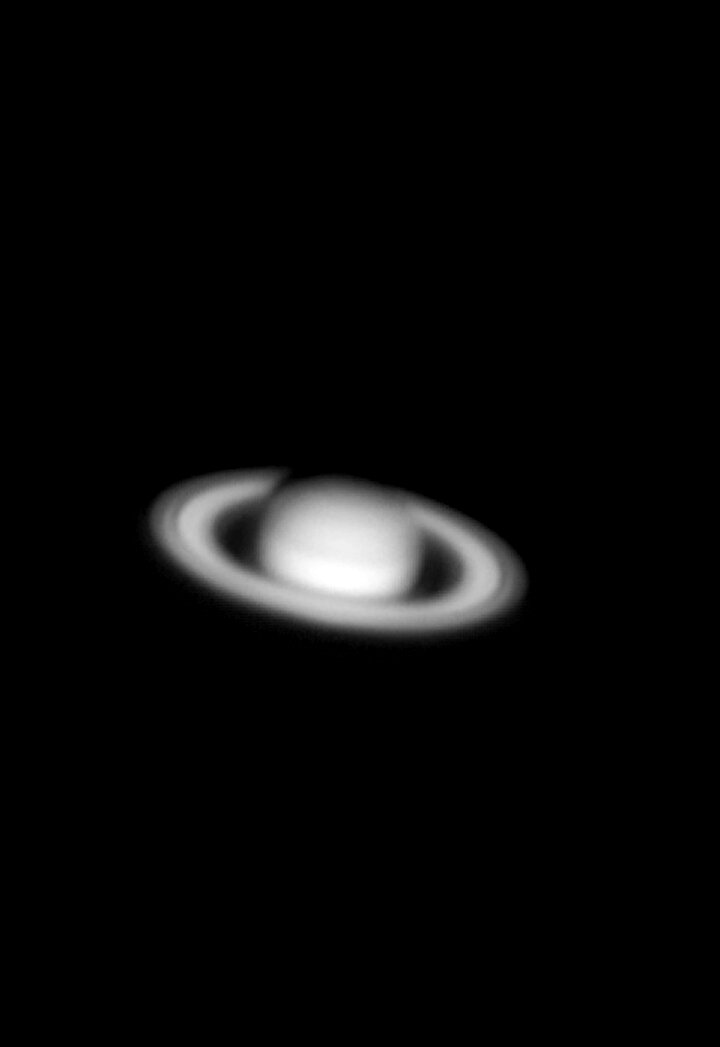
Najpierw Saturn:
Jest to zdjęcie zrobione jedynie w paśmie podczerwonym (później czemu).
Widać przerwę Cassiniego, widać cień Saturna na jego pierścieniach i nawet pasy na jego powierzchni.
Nawet nieźle to wyszło. Mogło być lepiej, ale źle nie jest
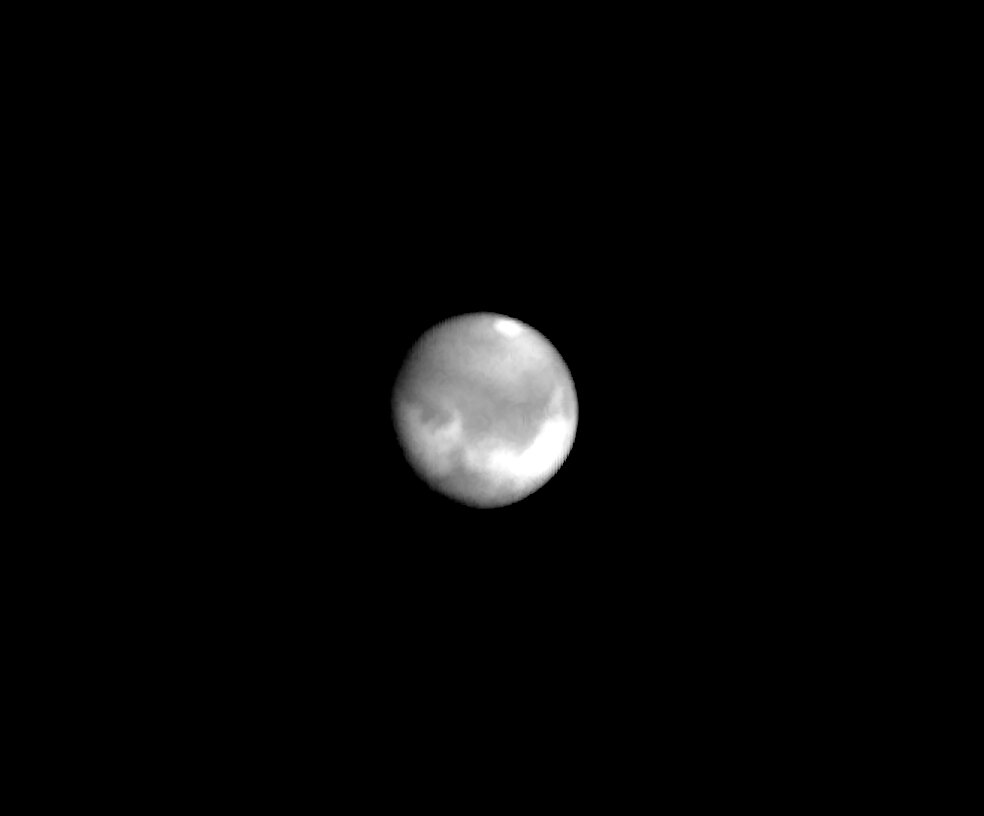
No i Mars w paśmie podczerwonym:
Nawet widać czapę polarną i struktury na powierzchni.
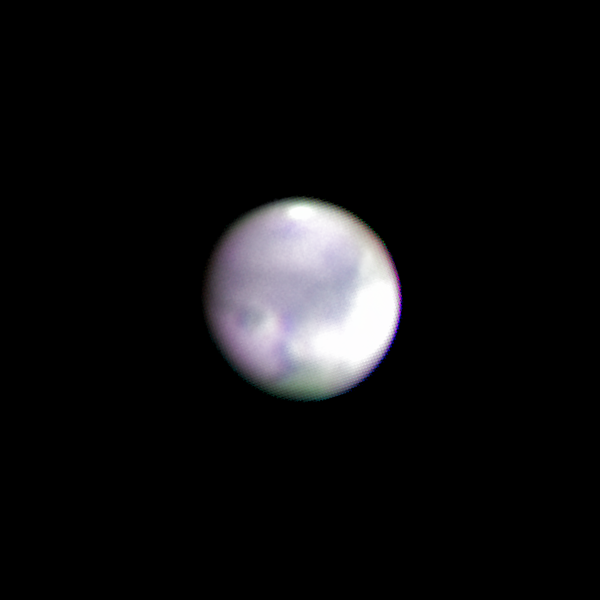
Próbowałem też pobawić się fotografię z użyciem filtrów RGB i IR, gdzie IR miał służyć jako kanał do kalibrowania luminacji, a RGB do odwzorowania barwnego.
Wyniki są jednak takie:
Czyli zasadniczo żadne.
Temat raczej jest do zarzucenia. Po pierwsze - nie mam koła filtrowego. W efekcie po każdej zmianie filtra muszę na nowo ogniskować cały układ. Czyli odjechać na jaśniejszą gwiazdę, znaleźć ją w polu widzenia optycznym szukaczem (wciąż nie mam GOTO), zogniskować używając maski i wrócić do planety.
Po drugie - posiadane przeze mnie filtry nie są filtrami do astrofotografii. To są proste, tanie filtry do astronomii wizualnej. W efekcie każdy z nich ma gorszą ostrość niż filtr IR-pass (który już dedykowany do astrofotografii jest), a dodatkowo nie są one skalibrowane względem siebie, ani nie są parafokalne (czyli nawet koło filtrowe nie rozwiązuje tematu, bo zmieniałaby się ogniskowa).
Po trzecie - nawet jeśli to mam za mały teleskop
Niemniej - sprawdziłem, pobawiłem się, da się
Pozostaje tylko jedno pytanie. Czy gdybym wziął swojego Newtona (który jest jednak sporo większy), dorzucił mu klin paralaktyczny, który wyrównałby oś obrotu podstawy z osią niebieską, dorzucił jakiś prosty napęd paskowy i robił foty z niego to może bym więcej ugrał?
Raczej tego nie sprawdzę



FC do hexy + 2-3 serwa
w Multikoptery
Opublikowano
To w niczym nie pomoże, bo kolega ma specyficzne wymagania.
Tzn. żeby być jasnym - Potrzebuje 6 wyjść PWM taktowanych dla protokołu ESC (DShot, Proshot, etc.) i 2 wyjścia PWM taktowane innym timerem, tak żeby mogły pracować na innym taktowaniu (serwa z reguły zamykają się na 50hz).
W praktyce - zostają jedynie FCki na procesorach F722 i F765.
Powiedz jeszcze - planujesz to latać z iNavem?