Patryk Sokol
-
Postów
3 661 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
107
Treść opublikowana przez Patryk Sokol
-
Wklejaj co jest, będzie dobrze. Może później być potrzebny mały mix silnika z SW. Ale sam się nigdy w miksa nie bawię, nie mam potrzeby To jest, niestety, dosyć istotne. Jak ja się na to złapię to w jeden otwór na śrubę wstawiam tuleję z rurki mosiężnej. Kleję to na skręconym skrzydle, tak żeby żywica wybrała luz między tuleją, a skrzydłem. A przez to, że kleję na kadłubie, to łatwo dopasować skrzydło perfekcyjnie.
-

Klejenie folii termokurczliwej do konstrukcji plastikowej
Patryk Sokol odpowiedział(a) na Jacekecaj temat w Warsztat
No i wypas. Mam ciekawy projekcik przed sobą, może przetestuję -
Klejenie folii termokurczliwej do konstrukcji plastikowej
Patryk Sokol odpowiedział(a) na Jacekecaj temat w Warsztat
Co to za tkanina jest? Znajduje mi google tylko jakieś agrowłókniny Każdy akrylowy da radę, testowałem na Koverallu. -
Możesz też pójść w inną stronę i kupić poszewkę poliestrową w pasmanterii Technika krycia jak Koverallem, ale jest ciut lżej (kwestia jeszcze gramatury jaką byś kupił) i nieco trudniej (gorzej się napina).
-
Patrz a mi AI mówi coś takiego o wytwarzaniu kwasu solnego: I czy to świadczy o tym, że faktycznie się nie wytwarza? Nie - świadczy o tym, że korzystanie z AI, licząc że dowie się czegoś nowego, to jak używanie śrubokręta wbijając go sobie w oko. Poza tym - kwas solny tak nie działa. Kwas solny, to chlorowodór. Jest gazem o dobrej rozpuszczalności w wodzie. Gdy woda odparuje, kwas solny również paruje. Nie da się mieć kwasu solnego bez wody. Więc albo masz modelarnia o wilgotności sauny (to by potwierdzało brak wentylacji i cofkę z komina), albo to nie to. Dodatkowo - wdychając chlorowodór efekty nie są do poczucia najpierw na ustach. 10x szybciej spalisz sobie śluzówkę nosa. No i kwas solny nie ma słonego zapachu. Jego zapach bardziej bym porównał, do walenia sobie młotkiem w nos. Jako ostateczny test czy to chlorowodór to proponuje położyć się na podłodze w modelarni. Chlorowodór jest cięższy od powietrza, więc jak przeżyjesz, to znaczy, że to nie to.
-
A to tak. Ale to się zrzuca nad lasem, a nie "rozpyla nam nad głową". Więc myślę, że kolega ma co innego na myśli.
-
Nie wiem, to internet. Ludzie w różne bzdury wierzą, a rozsiewanie szczepionek z samolotu jest tak durne, że chcę wierzyć, że to żart.
-
14s4p praktycznie mieści się pod maską silnika, będzie git Szczególnie, że mogę go sobie polutować tak jak sam mam ochotę.
-
Zdarzyło mi się naprawić w życiu dwie ramy rowerowe. I to wygląda parszywie, bo jak czołowe zderzenie roweru z czymś (bo jeśli to byłoby od przeciążeń, to pęknięcie było by od góry ramy). Nie wiadomo co tam pod lakierem znajdziesz, a jak ktoś podejmie się naprawy, to weźmie za to większe pieniądze, niż ten rower na OLXie kosztuje. Zaś naprawę samemu, bez doświadczenia, mocno odradzam. Ten rower jest tańszy niż wstawienie jednego zęba.
-
Elektryk 4ever Zobacz jak to teraz wygląda. Silnik: https://nastik.pl/produkt/dualsky-ga8000-9s-kv140-moc-maks-8550w/ 1600zł Regler: https://pl.aliexpress.com/item/1005009203805188.html?spm=a2g0o.tesla.0.0.e818QBM3QBM3Sr&pvid=1535d90b-4eef-42ea-97e8-5fe5feb36021&afTraceInfo=1005009203805188__pc__c_ppc_item_bridge_pc_main__Kw9niWj__1777304838427&gatewayAdapt=glo2pol 555zł I pakiet 14s4p z LiIonów 4500mAh -1120zł Całość około 3200zł. A tymczasem DLE 120ccm obecnie kosztuje około 3400zł. Teraz elektryki, nawet w takich mocach nie są droższe A w gratisie dostaję ciszę, spokój, brak tłustego modelu i smrodu benzyny w samochodzie.
-
Będą działać. Najwyżej będzie wymagać trochę większej różnicowości
-
Jeśli chcesz żeby latał jak klasyczny trenerek, to rób Clarka Y. A jeśli chcesz żeby latał jak samoloty z tamtej epoki, to rób taki jak pokazałeś. Trudno mi nawet jakoś to inaczej wyjaśnić, po prostu takie profile powodują, że samolot prowadzi się jakoś tak inaczej (jakoś tak - lekko?) Sam bym wklęsły profil wybrał.
-
Ledwo widzę co tam się dzieje na tych zdjęciach. Zrób inaczej - wejdź w monitor kanałów i zobacz czy 7 kanał zmienia wartość, gdy przerzucasz przełącznik SF.
-
Powinno działać bez problemu, pokaż zdjęcia jak podpiąłeś przełącznik do mixa Bez żadnego problemu
-
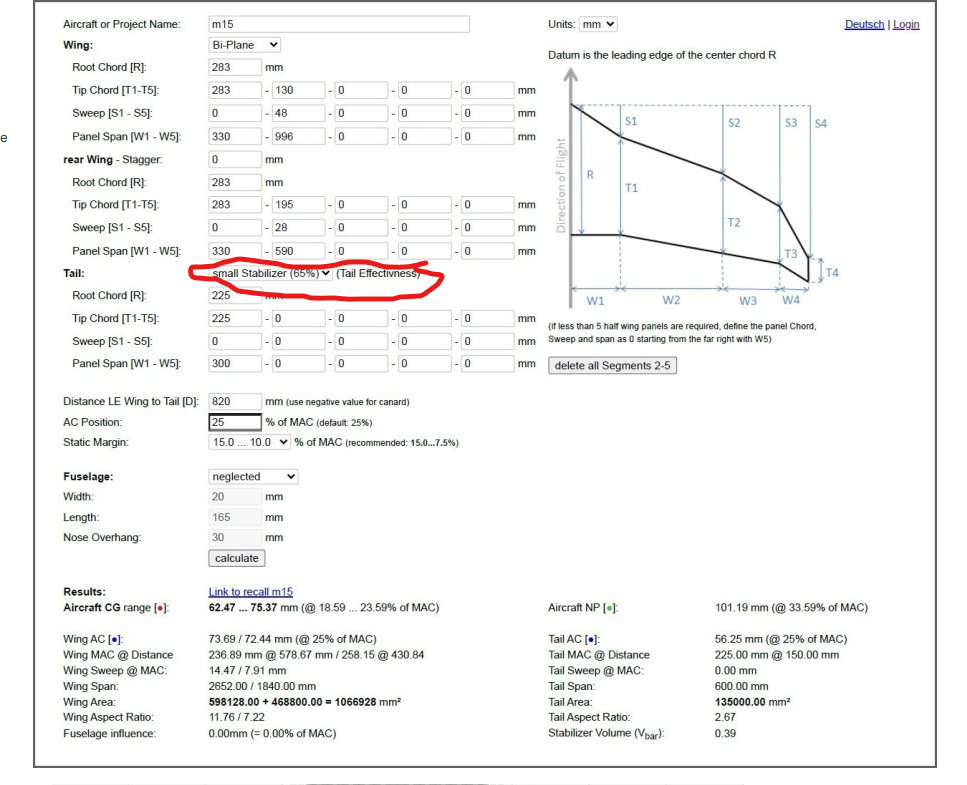
PZL M-15 Belfegor
Patryk Sokol odpowiedział(a) na robertus temat w Skrzydełka, kaczki i "odrzutowce"
Problem jest tutaj: W Belfegorze spokojnie można przyjąć 100% powierzchni, bo statecznik ma bardzo komfortowe warunki pracy.
-
RWD-10 2,5m
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Konwersje spalin na elektryki i elektryczne "giganty"
W niedzielę RWDziak rozpoczął kolejny sezon: I co ciekawe - pierwszy raz latał na Mazowszu Niestety - nie na Polach Mokotowskich Chciałbym w tym roku zrobić parę zmian w RWDziaku. Przede wszystkim - muszę zrobić nowy akumulator oraz jakieś wyposażenie kabiny. Czy ktoś z Was zna jakieś gotowe instrumenty w tej skali (1:3)?
-
To żeby Ci zamieszać, to jest jeszcze Heli-X https://www.heli-x.info/cms/ Na moje to ma porównywalną fizykę z AccuRC2. Ma też darmowe demo, więc enjoy
-
Przesiadka z FRSKY Taranis X9lite na Futabę lub Jeti
Patryk Sokol odpowiedział(a) na chicken007 temat w Aparatury RC
FRSky ma dstrybutora w Polsce: www.modele24.pl Sam mam już 5 lat Tandema, zero narzekań na cokolwiek, a robiłem z tm systemem dużo rzeczy. -
Jeśli chcesz symulator do helików to odradzam Realflighta. Zdecydowanie lepszy jest AccuRC2: https://store.steampowered.com/app/495290/AccuRC_2/ Dodatkowo - jest dużo tańszy i działa nawet na moim słabawym laptopie No i pamiętaj, że jak zakupisz na Steamie, to w ciągu dwóch godzin możesz oddać za darmo. Dzięki temu możesz kupić, przetestować i oddać, jakby komputer był za słaby.
-
Delta z depronu w 120minut
Patryk Sokol odpowiedział(a) na bzik4 temat w Skrzydełka, kaczki i "odrzutowce"
To co mamy na forum to któreś potomstwo Pibrosa, pewnie jeszcze z rodowodem do klasycznej strony www.depron.prv.pl (która niestety nie działa, ale była kultowa) Mój akurat ma silnik elektryczny. Jakiś T-Motor z oldschoolowego quadrocoptera. -
Delta z depronu w 120minut
Patryk Sokol odpowiedział(a) na bzik4 temat w Skrzydełka, kaczki i "odrzutowce"
A idąc dalej. Nieśmiertelny Pibros jest nieśmiertelny również w necie Jego strona wciąż jest dostępna: https://rc-soar.com/pibros/ I co najlepsze, wciąż lata według tych planów. W zeszłym roku takiego sobie zbudowałem i smiga do dziś -
Wiesz RWDziak szybowcem raczej nie jest. Mojego posadzić bez silnika się da całkiem zgrabnie, ale nie ma miejsca na błędy.
-
Mój ma obciążenie powierzchni 114g/dm^2 Ale tak całkiem poważniej - u mnie wychodzi obciążenie powierzchni, podniesione do sześcianu na 11,89, u Ciebie 16,7. Czyli twój model, optycznie będzie się wydawał szybszy o około 1/4 (bo o połowę większe obciążenie, ale idzie to pod pierwiastek). Tragedii nie będzie, mój jest w locie całkowicie potulny i powolniutki. Ale jak wciąż się obawiasz, to zapraszam na lotnisko do Nysy, chętnie przy oblocie pomogę