Y/F-22
-
Postów
974 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez Y/F-22
-
Odwrotnie podpiąłeś przewody do odbiornika (sygnał ze złej strony), nie zbindowany odbiornik z nadajnikiem, nie podpiąłeś pakietu zasilającego do quada. CC3D i odbiornik muszą działać (zasilanie przez regulator) i być podpięte USB, wszystko zbindowane, nadajnik włączony i nie ma siły żeby nie działało. Też się przeraziłem zanim zacząłem programować ale okazało się to bezbolesne i przyjazne użytkownikowi. Najpierw sprawdź bindowanie ... serwo i pakiet 4,8V pod odbiornik. Jak działa to sprawdź czy nie podpiąłeś odwrotnie przewodów do odbiornika. Potem zobacz czy w ogóle zasilane jest CC3D i odbiornik po podpięciu pakietu do regla. Jak to wszystko będzie ok to musi działać. Może masz walnięty kabel - podstawowa sprawa to taka, że nawet niezaprogramowany CC3D i "gołe" świeżo zainstalowane oprogramowanie OpenPilot GCS po podpięciu CC3D powinno go wykrywać i w zakładce ze sztucznym horyzontem mają być wykrywane ruchy kontrolera we wszystkich osiach. Jeśli nie widać żadnych reakcji, zmian i nie widzi CC3D to masz coś walnięte - kabel, USB albo złe oprogramowanie. W Turnigy 9x nic nie ustawiasz, dajesz tylko model samolotu, ustawiasz sobie mode pod którym latasz (do każdego nowego modelu w pamięci nadajnika robi się to od nowa) i ewentualnie ustawiasz sobie który kanał pod którym przełącznikiem pod zmiany trybu lotu itp. tak zostawiasz wszystko na zero. Reszta robi się automatycznie przy programowaniu (zakres wychyleń, reversy, trymowanie itp)
-
W 35 mHz masz kwarce którymi "łączysz" tzn. parujesz nadajnik i odbiornik razem, tutaj to robisz zworką. Zworkę wkładasz w jeden z kanałów (opisane w instrukcji) i uruchamia się proces bindowania w odbiorniku, reszta jak to zrobić jest na youtube i w instrukcji. Innej po Polsku chyba nie ma, tylko ta jedna. I nie jest chaotyczna, jest naprawdę dobrze napisana.
-
Dokładnie jak wyżej, tam jest sekwencja i jest napisane kiedy odpiąć a kiedy podłączyć (pod USB), pakiet masz mieć cały czas odpięty. Podpinasz go tylko gdy testowane są motorki i gdy ustawiasz radio (aby program wykrywał ruchy drążków czyli odbiornik musi mieć zasilanie). Wyżej na zdjęciu nie odłączyłeś kontrolera w czasie jaki był Ci dany, powinieneś go wtedy odpiąć od peceta.
-

Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Czy do tych motorków są jakieś pasujące piasty z odwrotnym gwintem? Bo te czarne silniki ZMR są sprzedawane jako wersje CCW i CW a BE1806 tylko w jednej postaci, może podpasują jakieś piasty od innych motorków? Bo w sumie to kwestia pewnie paru złotych i będę miał spokojną duszę. Tutaj piasta jest zintegrowana tzn. nie jest przykręcana do wału tylko do korpusu silnika lecz nie widziałem tego motorka w wersji "odwrotnej" tak jak ZMR'y. Dzisiaj byłem na politechnice na pokazach i zagadałem do gości którzy robili pokaz tricopterem, też latają na CC3D i mówili, że obsłuży on GPS'a do quada jako do stabilizacji a nie tylko do informowania o położeniu tylko trzeba pogrzebać w sofcie, na dłuższą rozmowę nie miałem czasu. Ktoś coś wie na ten temat? UHU ma służyć jako lepiszcz nie do gwintu ale chodzi tylko o to aby zwiększyć tarcie pomiędzy podstawą nakręcanego kołpaczka a śmigłem, tyle już powinno wystarczyć aby bezpiecznie latać. EDIT: Na takim se, 20C pakiecie 1300 mAh + podpięte fpv model latał dzisiaj w pokoju około 7 minut (z groszami...) . Waga z pakietem 1300 mAh - 420 gram do lotu. Ustawiałem pidy więc to nie było wiszenie a obijanie się od ściany do ściany i majtanie gazem. Liczę, że na porządnym pakiecie spokojnie pójdzie 9-10 minut, ten daje ledwo 26A a w praktyce to i może 20A bo ma kilka miesięcy i parędziesiąt lotów za sobą. Po locie mocno ciepły, nawet nie wiem czy nie zbiera im się na puchnięcie bo coś tak w kościach czuję. Ogółem kupię możliwie jak największy pakiet o dobrej wydajności (tak z 1500 mAh 30C) aby dobić do 450 gram do lotu, to będzie optymalna waga a i polatam dłużej. znajomy ostatnio śmigał 11 minut. -
Kontroler pod odbiornik obojętnie jak podepniesz, wszystko jest potem ustawiane automatycznie w programie na PC. GPS w CC3D w quadach NIE DZIAŁA tzn. nie pełni funkcji stabilizującej ani żadnej innej. http://pfmrc.eu/index.php?/topic/50451-gps-do-open-pilot-cc3d/ 2 najważniejsze rzeczy - tak polutować silniki aby kręciły się w odpowiednie strony, potem trzeba podpiąć odpowiednie silniki w odpowiednie kanały w kontrolerze ale Ty masz opisane na obudowie chyba. Ogółem tak : Lewy Przód nr1 - gniazdo numer 1, obraca się w prawo Prawy Przód nr2 - gniazdo numer 2, obraca się w lewo Prawy Tył nr3 - gniazdo numer 3, obraca się w prawo Lewy Tył nr4 - gniazdo numer 4, obraca się lewo Śmigła mają się kręcić "do ramy" czyli "zamiatać" powietrze w jej stronę.
-
Pakiety jak pakiety, lepszych nie potrzeba do takiego modelu, wydajności aż zanadto jak do tego modelu. Na firmę to można patrzeć przy modelach akrobacyjnych, pylonach, przy śmigłowcach itp gdzie prąd ucieka jak głupi i pakiety dostają po tyłku, tutaj nie gra to większej roli w motoszybowcu.
-
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
O tym wiem doskonale ale akurat moja partia jest sztywniejsza od tych co ma znajomy, mój quad jest także w miarę lekki a pakiety wydajnościowo słabe więc motorki nie pracują na pełną parą oraz także i śmigła, po trzecie większość lata właśnie na tych śmigiełkach nawet cięższymi sporo quadami i nie ma problemu. To może być kwestia zbyt mocno dokręconej piasty, naprawdę dowaliłem na gwincie aż się bałem, że pęknie śmigło i może jakiś rezonans wchodzić i buczeć przy naprężeniach plastiku tzn. małe wibracje przenoszone z łopaty. Tak tylko gdybam, jest ok tylko czasem świszczy szczególnie jak obracam wokół pionowej osi (lewo prawo). Najprawdopodobniej kapnę na piastę od strony śmigłą trochę uhu, jest dość kleisty a łatwo go usunąć, powinien zabezpieczyć mnie przed ewentualnym poluzowaniem się i odkręceniem piasty. -
Jesteś z Częstochowy to mogę Ci zamówić, podjedziesz odebrać osobiście a przy okazji i ja coś bym wziął z hk.
-
Banggood, hobbyking, kupno używanego, gorszej firmy, słabszego wydajnościowo ... opcji jest wiele. Tutaj 2 pakiety z wysyłką wyjdą 2 x 13.95$ + 10,35$ za wysyłkę jak pamiętam, razem jakieś 140 zł. http://www.hobbyking.com/hobbyking/store/__38083__Turnigy_2650mAh_3S_20C_Lipo_Pack_.html https://www.google.pl/search?safe=off&q=lipol+3s+2600+mAh&oq=lipol+3s+2600+mAh&gs_l=serp.3...6665.7451.0.7594.6.6.0.0.0.0.114.217.0j2.2.0.msedr...0...1c.1.61.serp..6.0.0.ruaW_lMEwvc
-
Oczywiście, że udźwignie. Fabryczny pakiet lamy ma chyba tylko 10C wydajności czyli ... 8A? Dlatego tak często puchną, kup coś o większej wydajności, lamkę można też całkiem fajnie odchudzić. Oczywiście jeśli silniki nie są zajechane, wtedy żaden nowy pakiet nie pomoże. Na komputerowej ładowarce takich pakietów możesz naładować naraz parę sztuk, z 4ry czy ile tam potrzebujesz ... czas latania przedłużysz nowym pakietem może minutę - półtorej a ładować i tak musisz godzinę, dla mnie bezsens. Wystarczą najtańsze 800 mAh 20C jak najlżejsze, te fabryczne od lamy do lekkich nie należą jak pamiętam bo sprawdzałem i porównywałem.
-
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Nie będę sobie zmieniał softu zanim w ogóle odpalę quada, na oryginalnym jest ok, kwestia ustawienia pidów a może i tylko wyważenia motorków żeby nie przenosiło drgań, dochodzi jeszcze jakość śmigieł. Nie ma co kombinować bo jest ok, pidy mam już mniej więcej ogarnięte co i jak trzeba pozmieniać, teraz tylko przysiąść i się zabawić trochę czasu aby okiełznać wszystkie parametry osi. -
Nie no świetny, jeśli to nie jakiś projekt na studia to na pewno taniej wyszłaby najprostsza 4ch aparatura z allegro choćby pod 35 mHz ... najtańszą esky można dostać za 50 zł.
-
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Kamera chyba będzie zmieniana, pakiety 3s 1500 mAh ale z większym C tzn. przynajmniej 30C, kamera pod 12V, powinno odejść z 40-50 gram wagi a to już coś. Znajomy lata w takiej konfiguracji około 11-12 minut czyli bardzo długo jak na takie maleństwo, nie wiem jak to osiągnął ale 8-10 minut będzie jak najbardziej ok. -
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Zacytuję siebie samego -
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
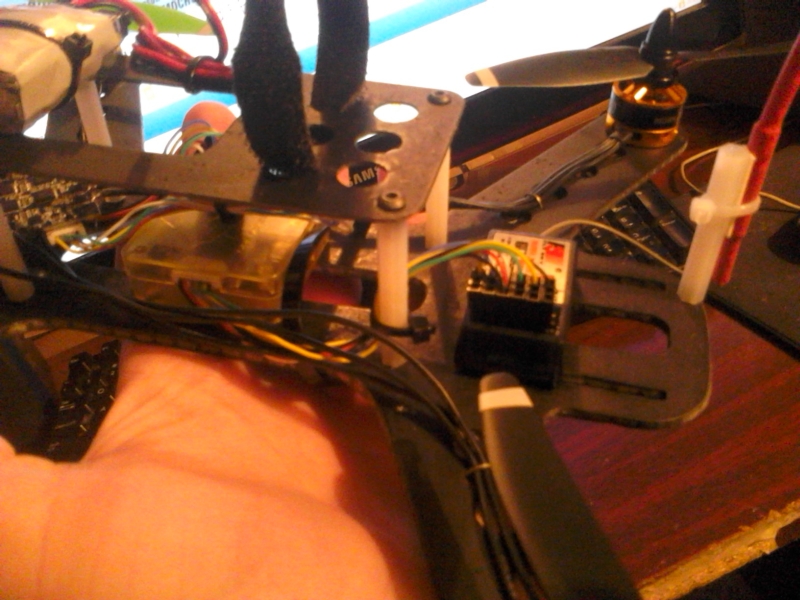
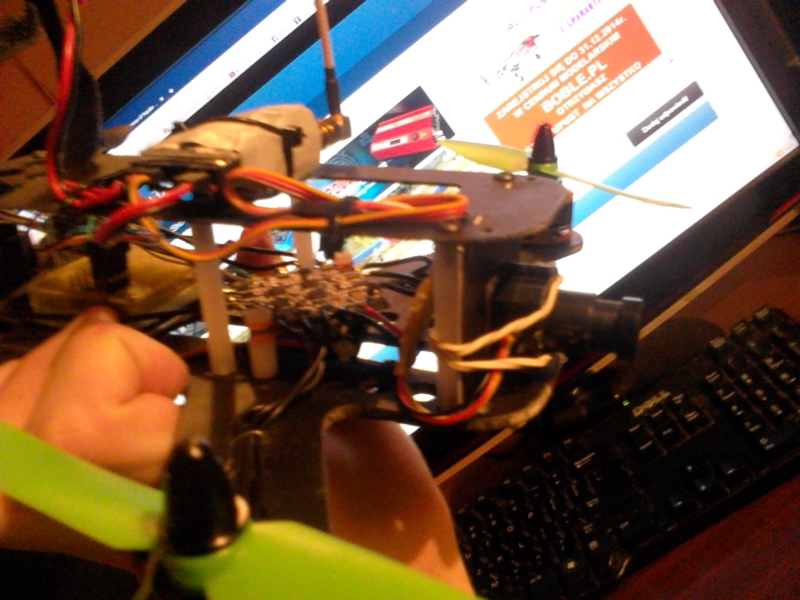
Lista zakupów na poprzedniej stronie, do regla użyłem dystansów z bolcem (bolec ma gwint) który ma także gwintowany otwór 3mm, ogółem dystans wchodzi bolcem w podłogę ramy i od drugiej strony złapany jest poliamidowymi nakrętkami (w sumie nie są potrzebne bo można sam bolec wkręcić i się świetnie trzyma ale wolałem zrobić to całkowicie pewnie). Podkładki wyciąłem sobie wybijakami z kawałka gumy, regulator przykręcony poliamidowymi śrubkami 3mm. Trzyma się świetnie, ma amortyzację, jest odizolowany od wibracji. Ogółem dystanse ramy mógłbym skrócić nawet z 10 mm (teraz są 40mm) ale to niepotrzebna zabawa, może by lepiej wyglądał ale teraz mam dobrą odległość między regulatorem, nadajnikiem fpv a odbiornikiem rc tzn. chodzi mi o możliwie jak najlepszą separację urządzeń i anten aby możliwie jak najbardziej wykluczyć ewentualnie zakłócenia, teraz są od siebie odpowiednio oddalone. EDIT. Filmik z pierwszego w miarę normalnego latania, wyważenie śmigieł poprawiło znacznie sytuację (da się latać), teraz jeszcze wyważenie silników i ustawienie wszystkiego. Póki co wpada mi w wibracje tzn. oscylacje i to szybkie, w osi roll tzn. lewo prawo cały czas a w osi pitch tzn. przód tył troszkę słabiej ale jednak, widać to w momencie gdy wiszę parę sekund na jednej wysokości. Te gwizdy na filmie to śmigła, ciekawi mnie dlaczego tak świszczą, może kwestia obciążenia. https://picasaweb.google.com/111845510033387312425/Quad2#6108317289003990754 -
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Z tą wagą to wyszło jak wyszło, pełny FPV waży 480 gram z pakietem 3s 1500 mAh i do FPVki 2s 800 mAh. Czy to dużo ... moim zdaniem wynik niezły, sam pakiet fpv waży 55 gram, myślałem nad zmianą kamery na taką pod 3s ale ta daje obraz świetnej jakości więc kupno kolejnej tak dobrej ale pod inne napięcie to wydatek przynajmniej 70 zł u chińczyków. Te pakiety i tak są za słabe wydajnościowo, 1300 i 1500 to tylko 20C więc trochę mało, znajomy na moim 1300 mah latał podobno 7 minut a na 1500 mah 9 minut .... na swoich 1500 mah 30C lata 12 minut i jego quad jest kapkę cięższy od mojego bo ma osd i inne dodatkowe elementy. Łapcie fotki, jestem w pełni zadowolony z efektu, wszystko tiptop dopięte na ostatni guzik, nie ma miejsca na walające się kable, na luźne wiązki, na powpieprzane wyposażenie przyklejone taśmą ... wszystko picuś glancuś, regulator na dystansach i płytka z obu stron oddzielona podkładkami, antena odbiornika wypuszczona w górę na pałąku, nadajnik fpv umieszczony na górze, kabelki od kamery i nadajnika poukładane, wiązki pospinane trytytkami ... chciałem zrobić to jak najlepiej a nie w formie prowizorki i chyba się w sumie udało, pomalowana na czarno rama mimo że byle jak sprayem to prezentuje się naprawdę bardzo dobrze. Ogółem wygląda jak zrobiony przez skośnych braci a nie jak samoróbka Ogółem zrobiłem go do wożenia w walizce z radiem oraz goglami fpv, ładowarką i pakietami, ma to być komplet który mogę razem zabrać gdziekolwiek. Zdjęcia będą lepsze, póki co na szybko telefonem.
-
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Śmigła wyważam magnetycznie tzn. za pomocą zwykłej wyważarki jak na zdjęciu + 2 magnesy które sobie nakleiłem na pudełkach a pudełka obciążyłem aby nie jeździły. Aby mieć jak najmniejsze opory to jedna spiczasta strona dotyka magnesu a druga wisi w powietrzu, już lepiej tego w domowych warunkach bym nie zrobił bo nie mam magnetycznej wyważarki ze stojakiem itp. Silniki chyba wyważę na oko tzn. taśma izolacyjna i wyczucie w palcach, teraz czujnika acc nie wyczaruję. Znajomy mówił, że !podobno! sam kontroler ma funkcję wyważania silników tzn. coś tam niby pokazuje ale pojęcia nie wiem o co może chodzić i jak to działa, muszę poszperać w programie od kontrolera. -
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Wstępnie poleciał, ustawiłem, polutowałem i zrobiłem krótki zawis na parunastu centymetrach. Szału nie ma, wibracje są, oscylacje dość mocne w osi roll także. Oraz jest źle wypoziomowany ale to kwestia paru minut ustawień. Najważniejsze, że oderwał się od ziemi. Jak polecacie wyważyć silniki? Jest na to jakiś patent ułatwiający zadanie? Bo śmigła śmigłami, trafią się raz lepsze raz gorsze a silniki wypadałoby wyważyć raz a porządnie. Pidy i resztę magicznych zaklęć ogarnę ze znajomym, Jakie tryby lotu mam wgl do dyspozycji w przypadku gołego cc3d bez baro, gps itp? Na razie mam ustawione 2, stabilizację i manual, w jednym trzyma zawsze (powraca do niej) pozycję poziomą a w drugim model pozostaje w takiej pozycji w jakiej zostawię go na drążku. Czy jest jeszcze jakieś akro itp z którego mogę skorzystać czy tylko te 2 tryby? -
Samo w ziemię zazwyczaj nic nie wali, samo się zazwyczaj nic nie psuje (albo z winy użytkownika albo skośnookich braci) ani też samo nie lata! I warto zapamiętać te 3 podstawowe zasady. W sklepie cyberfly (google) był fajny trener górnopłat z epp za chyba 99 zł jeśli już idziesz w coś typu KIT czyli do samodzielnego (prawie) zbudowania i wyposażenia. Ogółem szedłbym w coś z napędem pchającym ale takich konstrukcji w niskich cenach z epp praktycznie nie ma, tylko easy star/beta i reszta klonów. Na początek to proponuje kupić Ci podstawowe wyposażenie czyli nadajnik z pakietem zasilającym i ładowarkę, zerknij na Turnigy 9x i Turnigy Accucel 6. Do tego symulator i trening na komputerze, w międzyczasie możesz składać pierwszy model. To najlepsza, w miarę niedroga i najrozsądniejsza droga chyba, że ktoś lubi tworzyć sobie problemy w postaci kupna akrobata na pierwszy raz wraz z tanią aparaturą a potem model rozbity a nadajnik do wymiany bo brakuje funkcji.
-
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Zamówiłem parę pierdółek, bez tego nic więcej bym nie zdziałał. Rama montowana na pozycjach nr 1 i 7, regulator na tych tulejkach z bolcem, zrobię otwory w ramie i bolce albo wkleję na żywice i nadmiar bolca odetnę lub ewentualnie jeśli bolec ten ma gwint to przykręcę nakrętką nylonową a sam regulator będzie przykręcony tymi krótkimi nylonowymi śrubami do tulejek. Nie wiem niestety jaki szeroki mają łeb, może się okazać za duży dla płytki regla. Druga opcja to tulejki dystansowe 10 mm + śruba nylonowa + nakrętka.
-
Projekt micro quada "H" pod FPV, koncept nowej ramy!
Y/F-22 odpowiedział(a) na Y/F-22 temat w Platforma - nasze konstrukcje
Masz jakieś namiary gdzie można dostać? Update taki, że zamówiłem dystanse do ramy i regulatora, podkładki, śrubki i inne pierdoły. Złożyć jedno, potem przyjdzie mi to wszystko poustawiać a z tym pieruństwem jeszcze styczności nie miałem więc będzie sporo pracy. -
Szczerze to sam musisz się dowiedzieć, tutaj to mało kto jest w podobnym wieku co ma pojęcie o tych sprawach. Musisz się zdecydować na jedno, określić się i zobaczyć jak do tego dojść. Tutaj nie ma miejsca na sugestie, co najwyżej możesz otrzymać opinię i też musisz podchodzić do niej z dystansem! Wiem bo sam miałem dylemat z liceum a teraz mam ze studiami, musisz sam siebie zapytać czego chcesz. Każdy każdemu doradzał, idź tu bo fajnie, nie idź tam bo nauczycielka ma krótkie włosy i jest brzydka ... Popytać, popisać do szkół, porozmawiać z ludźmi którzy się w nich uczyli, popatrzeć na rekrutację na studiach, poszukać o ewentualnej pracy i popatrzeć jakie wymagania mają dane firmy (dość istotne są przede wszystkim języki).
-
Nie przesadzaj, szerokość ramion jest taka w sumie normalna (zobacz inne tematy), większego rozstawu wirników nie trzeba jeśli ktoś nie wrzuca śmigieł 6 cali i większych, śmigła 5x3 gemfan są jak najbardziej ok. Środek ciężkości jest jak najbardziej zrównoważony ponieważ półki są trzy a ramiona są na wysokości środkowej centerplate. Ba, dolna półka ma nawet dłuższe dystanse od górnej, resztę roboty odwala kontroler, jeśli jest dobry to nawet kij od szczotki możesz pionowo przymocować i powinien jako tako polecieć.
-
Musiałbyś polatać czymś takim jak honey bee fp a potem przesiąść się na 250tkę czy 450tkę, to nie jest kwestia możliwości lotu "w pełnym 3d" tylko zachowania, to dwa różne światy. V911 czy cokolwiek innego to takie zabaweczki, coś jakby autko z marketu porównywać do Baji, i to jeździ i to jeździ ... zupełnie inna charakterystyka zachowania się, totalnie inny świat. 4ch to nie w pełni sterowalny model, to model ze sterowaniem okrojonym do minimum aby mógł być latać w podstawowych kierunkach które wystarczają do zwykłego lotu dla początkującego, 450tka również nie musi latać wirnikiem do dołu, polataj 6ch modelem w normalu a nie w idlu a potem porównaj to do modelu 4ch. Ewentualnie pobaw się v922 lub podobnym mikrusem 6ch cp, szybko dojdziesz co i jak. 12-15 minut to może latać większość quadów, aby uzyskać to co pokazujesz raczej nie obejdzie się bez gimbala, do tego przydałaby się gopro albo coś tańszego lecz nie wiem na jakiej jakości Ci zależy. Quada z tanim gimbalem złożyłbyś za około 1000 zł na wystarczającym wyposażeniu, do tego oczywiście aparatura i reszta wyposażenia jak kamera, ładowarki itp
-
Bez szału, nic niesamowitego, nie widzę nawet konkretnej potrzeby stosowania tego urządzenia szczególnie za te pieniądze, w dodatku obciąża model o dodatkowe około 150 gram. Chyba, że pociągniesz przedłużacz na lotnisko, wylądujesz na tym i to ma Cię wyręczyć przed podpięciem samodzielnie wtyczki od ładowarki. Ewentualnie znajomy mieszkający kilometr dalej może podpiąć Ci to na dachu swojego domu i przy odpowiednio dużym prądzie ładowania można wylądować, poczekać te 20 minut pijąc kawkę i polecieć dalej ale to raczej trochę sztuka dla sztuki szczególnie za tą cenę. Chyba, że ktoś ma jakieś zastosowanie które mnie zaskoczy, być może o czymś nie wiem. To tylko kolejny sposób na ładowanie akumulatora, nie dość, że zapewne niezbyt szybki to w dodatku drogi i taki trochę niepraktyczny. Ciekawe co to za niesamowita technologia, nie wiem czy to na zasadzie indukcji czy jak ... ale czy to coś niesamowitego? Ta strona jak widzę po niektórych artykułach jest też opóźniona o jakieś 4 miesiące z "newsami", coś w rodzaju niektórych artykułów na onecie i to w dodatku tak uogólnione, że wiem tyle co bym to z ruskiego tłumaczył czyli niewiele (bo znam tylko szto eta i parę innych słówek).