






Pioterek
-
Postów
3 554 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
18
Odpowiedzi opublikowane przez Pioterek
-
-
"Popylacz" a historia
Dzisiaj ukazała się w Modelarzu druga część artykułu o Popylaczu (cz.1 5/2016; cz.2 7/2016)

Ponieważ Modelarz (jego kolejne wydania) są archiwizowane w Bibliotece Narodowej model "wślizgnął" się w ten sposób niejako do historii.
Byłem dzisiaj z modelem na lotnisku polatać trochę. Przeżywam obecnie trochę gorszy czas i model jakby chciał to mi wynagrodzić - latał pięknie, dawał dużo radości i ładował mnie pozytywną energią. Dzięki ci za to "Popylaczu"
-
Koła w tandemie są za blisko siebie jak coś w nie wpadnie to się zaklinują.
-
EDIT1: udal mi sie wyeliminowac "dziury" w komunikacji z modelem. zmienilem dwa elementy: przy locie antenka patrzy "w gore" (wczesniej latalem z odchylem w prawo-skos). aktualizowalem oprogramowanie nadajnika do wersji 6 (wczesniej mialem 4).ktory element pomogl? hmm.... tajemnica Futaby
Bardzo fajny materiał.
Ja też miałem podobną sytuację z dziurami w sygnale latając na granicy zasięgu radia.
Autopilot i OSD Pitlab którego używam sygnalizuje dźwiękiem niepełne i rwane ramki sygnału docierającego z nadajnika na granicy zasięgu. Zwykle jest to jeszcze parę dobrych sekund na zawrócenie modelu, kiedy się jeszcze słucha radia. Jeżeli nie zrobimy tego to model złapie Fail Safe i zawróci sam. Więc normalnie utrata zasięgu jest stopniowa i sygnalizowana.
Ale miałem czasami sporadyczne przypadki, kiedy model nagle i na krótko tracił zasięg - tzn. nie uprzedzał mnie o tym i zaczynał zawracać. Zastanawiałem się co może być tego powodem.
Być może "dziury" w sygnale o których wspomniał kolega Apathor mogłyby to zjawisko wyjaśnić. Zainstalowałem więc dzisiaj w mojej apce v 6.0 oprogramowania i spróbuję czy problem zniknie czy nie.
-
Ale Koledzy to latają w pierwszej lidze - a ja dopiero się uczę
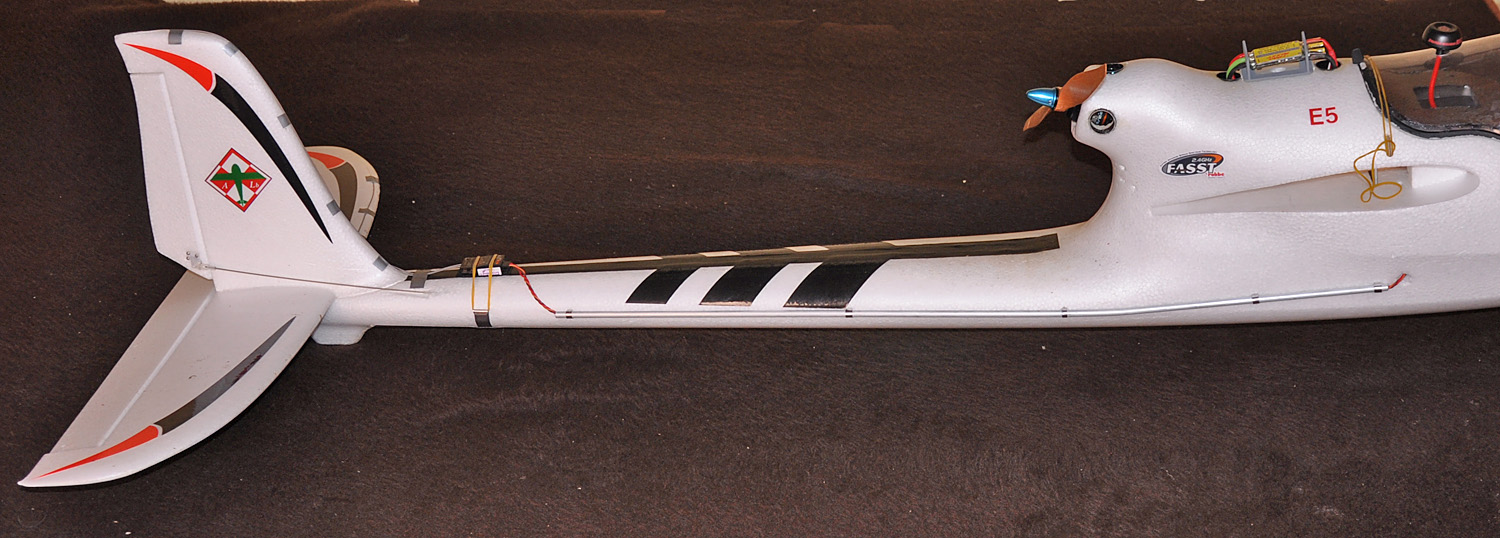
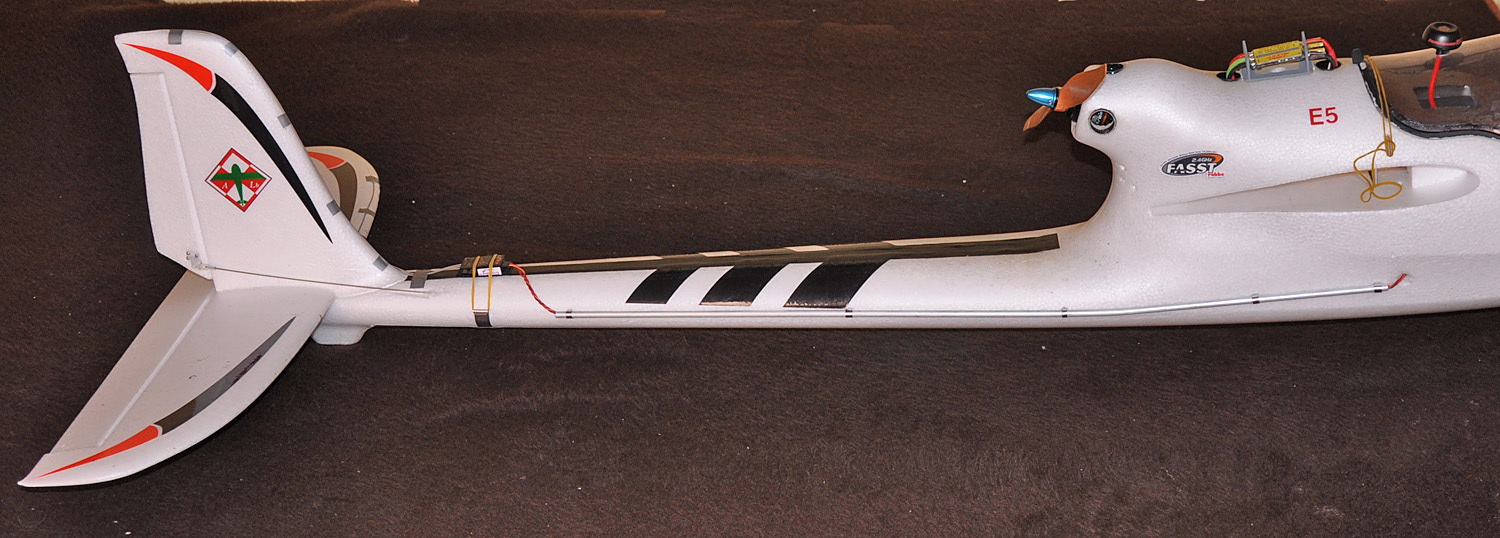
. Zdjęcie modelu z nowymi kołami i kamerą Mobius i odbiornikiem RC przeniesionym na ogon modelu.
i start wiatrakowca
-
OK, nie chcę Ci specjalnie zawracać głowy. Teraz jest dostępnych dużo różnych rodzajów farb i lakierów więc liczyłem na też podpowiedź 'prawdziwych wodniaków praktyków'.Ja nie bawiłem się w budowę od podstaw więc nie wiem czy są jakieś specjalne farby. Sprawdzę jutro na jakiej bazie są te jachtowe to będzie wiadomo czym można malować by potem pokryć owymi lakierami. Ale w sumie to jak wrzucisz w net obie nazwy to od razu wyskoczy co z czym mieszane jest
Jak robiłem kiedyś swoje modele pływające to sprawa była prosta tylko farba nitro i lakier dwuskładnikowy tzw. chemolak, bo nic więcej nie było w sklepach.
Ale teraz jest środków full wypas, tylko sprzedawcy nie zawsze wiedzą co z czym i do czego.
-
Wczoraj w Castoramie oglądałem lakiery do parkietu, były też Lakier jachtowy za 46zł i Lakier pokładowy za 51zł/puszka jeśli Ciebie to interesuje.
Dzięki zainteresuję się tym. A jaki rodzaj farby polecałbyś?
-
Jeszcze jedno zdjęcie DUSTY
-
Dzięki magistrali SBUS mogłem umocować odbiornik RC na samym końcu ogona modelu, z daleka od urządzeń FPV i zakłóceń elektromagnetycznych regulatora i silnika a anteny odbiornika wyprowadzić na stateczniki.
-
Korzystając z wyprawy na basen (obszerny brodzik) zabrałem ze sobą jeden z planowanych do budowy pływaków.
Znalazłem środek wyporu pływaka - jest pod redanem, próbowałem go też trochę poślizgać. Strugi na dziobie są płasko odkładane na boki więc nie powinny chlapać na pokład. Pływak łatwo wchodzi w ślizg. Ale to wszystko przy nieobciążonym pływaku, więc nie jest to raczej żaden "materiał naukowy" a raczej wstępna zabawa. Ale miejsce do testowania jest dobre. To na pływaku to poziomnica.
Dzieciaki miały swoje łódki i kaczuszki na basenie a ja mój pływak.
-
Dzięki Tobie już wiem jaki film sobie dzisiaj zapodam
a nawet 2A dzieci dopuścisz, czy raczej pokaz zamknięty ?
Sam też nieraz też oglądałem jak nie było domowników.
-
Otrzymałem od Pana Jarka wytłoczkę kabiny do mojego PZL P.24. Wytłoczka będzie już zestawie KIT. Zamierzam oczywiście zamontować ją w moim modelu. Ale na razie jest lato i trzeba z niego korzystać.
-
Jak wiecie głównym sprawcą tematu "Popylacza" była moja wnuczka Hania. Dzisiaj po raz pierwszy zaprosiłem Hanię na lotnisko, żeby zobaczyła model w locie:
podziwiano model ogólnie i szczegółach ....... intrygują te ruchome lotki, hmm to pewnie krasnoludek za tym stoi
Hania pomagała uruchomić przed lotem silnik
potem poinstruowała model jak ma poleciećzajęła wygodne miejsce obserwacyjne
znalazła też nowe zastosowanie dla mojego rękawa lotniczego
i stwierdziła, że można też latać inaczej
Wyprawa okazała się bardzo sympatyczna-
 2
2
-
-
Bardzo ale to bardzo dziękuję za informację o ciągu, przystępuję do pomiarów. Jak to mierzysz? Zapewne wprost na podwoziu, bo masz je dobrze zrobione. Za niecałych 5$ kupiłem "10KG Scale Load Cell Weight Weighing Sensor +HX711 Weighing Sensors AD Module"
http://www.ebay.com/itm/281925026200?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
i na tej podstawie buduję hamownię z automatycznym zdejmowaniem charakterystyk, ale na razie mierzę wagą "rybacką" (mało dokładna, trzeba kalibrować) kładąc samolot na wózku-pchaczu pożyczonym od 2-letniego synka. Opory toczenia są nieduże.
Co do puszczania z ręki to każdy lata jak może jeden lepiej drugi gorzej itd ale naturą samolotu albo szybowca jest dynamika i zmienność, do rzadkości należą takie które latają tylko z jednego miejsca. Może szybowiec "Bocian" wykorzystywany tylko w szkoleniu podstawowym? Mój 2600 chce zwiedzać świat
Zmontowałem wreszcie katapultę i może ten sposób startów też będzie wypróbowany?Pomiar ciągu robię prosto - stawiam model na twardej posadce, za ogon zaczepiam smycz i do elektronicznej wagi wędkarskiej. Gaz na max i ile uciągnie to przyjmuję że to ciąg statyczny - jest to jakieś przybliżenie ale zupełnie mi wystarczające do oceny napędu. Budowa hamowni choć chwalebna i celowa dla napędów wyczynowych, myślę, że dla modelu FPV to trochę przerost formy nad treścią. Ja zawsze badam ciąg napędu w zabudowanym i gotowym modelu a nie w warunkach idealnych.
Start jest prostszą częścią lotu - potem przychodzi lądowanie i w byle jakim terenie modelu nie posadzisz. 2600 FPV nie nadaje się do "zwiedzania świata" bardziej do zwiedzania miejsc z lądowiskami modelarskimi - jest za duży. Kolega klubowy ze swoim Pingwinem 1,6 m spacerował po górach Słowackich nosząc go przytroczonym do plecaka - i wtedy faktycznie zwiedzał z modelem świat.
Film Kolegi - azajac
-
Sprawdzony zasięg praktyczny odbiornika Futaba R7003SB to 1500-1600 m. Pomiar prowadzony na wysokości 100 m nad ziemią.
-
Obecnie po zmodyfikowaniu podwozia mam z powrotem śmigło 11x5,5, które daje ciąg statyczny przy naładowanych pakietach 2,2 kg.
A ja w dalszym ciągu podtrzymuję stwierdzenie, że model w mojej ocenie nie bardzo nadaje się do rzutów z ręki - ale każdy użytkownik 2600 FPV sam pewnie sobie wyrobi własne zdanie.
Filmy z 2600 FPV wychodzą stabilne, mam już kilka, ale na razie zbieram materiał, żeby zrobić jakąś składankę z kilku najciekawszych ujęć
-
Umiejscowienie odbiornika RC w modelu 2600 FPV:
2600 FPV nie ma specjalnie wydzielonych miejsc na montaż osprzętu radiowego. Ma obszerna kabinę w której można wszystko pomieścić bez problemu.
Jednak zauważyłem, że mój zasięg RC jest mniejszy od zasięgu wizji FPV. Mimo, że używany prze zemnie odbiornik Futaby nie ma wyjścia RSI podającego aktualną silę odbieranego sygnału, to jednak sam system Pitlab ma mechanizm informujący o pogarszaniu się odbioru komend RC. Informacja ta jest dźwiękowa i mija zazwyczaj kilkanaście sekund zanim łączność RC zostanie zerwana i włączy się Fail Safe nakazujący powrót modelu do bazy.
Sygnał RC składa się z "paczek" i jeżeli któraś z paczek dociera do odbiornika niekompletna uruchamia sygnał-alarm dźwiękowy w torze FPV.
Zasadą ogólną jest jak najdalsze umieszczanie odbiornika RC od potencjalnych źródeł zakłóceń elektromagnetycznych (silnik, regulator, nadajnik FPV, przetwornica itp.). Do tej pory nie przejmowałem się tym specjalnie, ale postanowiłem teraz spróbować zastosować się do tej zasady. Ponieważ mój odbiornik Futaby współpracuje z Pitlab po SBUS - (jeden trój żyłowy przewód), łatwo przeniosłem odbiornik na sam ogon modelu a jego anteny przykleiłem do stateczników SW i SK.
Długi kabel łączący prowadziłem w cienkiej aluminiowej rurce z boku modelu:
Wczoraj zrobiłem próby z nowym rozwiązaniem. Odczytany max. zasięg wzrósł o mi 200 m, nie jest to może wartość porażająca, ale chyba warto było to zrobić.
-
Bardzo fajny i ambitny pomysł - trzymam kciuki za realizację.
U mnie na razie wykluwa się koncepcja:
dwa pływaki samolotowe połączone sztywnym pokładem na którym będzie napęd śmigłowy - dwa silniki w jednej osi (lub stojące obok siebie) kręcące się w przeciwne strony, śmigła 9x4,5. Stery tradycyjne, dwa na pływakach, zanurzone w wodzie. Mam akurat wolne dwie trój-fazy i regulatory do nich no to to grzech nie spróbować. Temat będzie się trochę ślimaczył bo nie czas siedzieć teraz w domu i piłować, tylko pora korzystać z lata. Ale jak tylko pogoda się pogorszy i przyjdzie "wena twórcza" ruszę ostro do roboty z pełna relacją
-
Wydawało mi się, że są do kupienia same gołe kadłuby łodzi zanęntowych - może to byłoby bazą rozwojową?
Taki kadłub to kosztuje gdzieś w granicach 450-500 zł - cenią się
Kup płytę styroduru grubości 50 mm (XPS to w sklepach nazywają), wytnij z tego prostokąt np 800x400 mm, dwa pasy szerokości np 60 mm i przyklej te pasy pod płytą wzdłuż dłuższych boków. Trochę to nożykiem łamliwym podocinaj i porób skosy , tak żeby woda na wierzch nie pryskała i masz platformę ( dosłownie ) do filmowania. Taki katamaran z tunelem pośrodku.
Jak Ci się spodoba filmowanie , to okleisz to tkaniną szklaną , a jak nie, to wyrzucisz, ale doświadczenie zdobędziesz.
Napęd tego może być od śmigieł albo od śruby zanurzonej w wodzie.
Jak dasz śrubę powiedzmy 45 - 50 mm i silnik o obrotach kilka - kilkanaście tysięcy na minutę, to będzie to zasuwać, aż miło.
Pozdrawiam
Edit,
Chociaż pomysł z dwoma śmigłami wydaje się lepszy, pewnie nawet ster nie będzie potrzebny, przy niezależnym sterowaniu obrotami silników.
Bardzo fajny sposób na ekonomiczne zdobycie doświadczeń.
-
Napisałeś "platworma"
Już poprawiłem - za bardzo ufam wbudowanym słownikom - nie zadziałał
Dzięki za zwrócenie uwagi
-
Napęd śmigłowy to chyba najgorsze rozwiązanie dla Ciebie. Silnik zaburtowy był atutem bo masz cały pokład dla siebie( mechanizm z zasilaniem w sumie jest pod pokładem więc odpada argument zaburtowy
). Napęd śmigłowy zajmie część cennego miejsca na pokładzie. No i czy jest on tak wydajny jak tradycyjny( a może wydajniejszy...). Budowałem kiedyś łódkę z napędem śmigłowym - kadłub tradycyjny od jakiejś łódki, mały silnik spalinowy Cox na pokładzie (jedyny zresztą jakim się bawiłem - niezawodny) ster kierunku pod wodą. Śmigała bardzo fajnie choć miała moment żyroskopowy, ale dało się tym wspaniale pływać i ślizgać. Stąd pomysł żeby dać małe dwa silniki o przeciwnych obrotach ustawione jeden za drugim w jednej osi lub obok siebie.Jest jeszcze w odwodzie instalacja żyroskopu stabilizującego kurs. Napęd śmigłowy jest mi bliższy (z racji budowy modeli lotniczych) jest prostszy i w sumie chyba tańszy a trawa wodna nie wkręca się w śruby. Ale jak napisałeś słusznie ma też swoje wady niestety.
Wychodzi na to, że najprościej kupić jakąś pływającą zabawkę i doczepić do niej kamerę, ale korci mnie ten eksperyment w postaci zrobienia czegoś nietypowego.
Piter ,może edycja tytułu tematu
,razi...Oczywiście mogę tytuł zmienić - ale podaj argument dlaczego ?
Użyłem słowa "platforma" jako pojęcie techniczne, czyli coś co stanowi bazę pod konkretne zastosowanie - mówi się np.dobra platforma lotnicza FPV - czyli każdy stabilnie i ekonomicznie latający model z odpowiednia ilością miejsca pod osprzęt FPV, piloci z czasów II wojny twierdzą że, np. Hurricane był stabilną platformą bo podczas strzelania z karabinów maszynowych trzymał kurs. Jeszcze nie wiem co na końcu tego wątku powstanie katamaran czy łódka, napęd tradycyjny czy napęd aero i całość nie koniecznie musi przypominać znane typowe obiekty pływające - dlatego napisałem ogólnie platforma.
-
Po całym tym wstępie myślę, że chyba jednak dam platformie napęd śmigłowy. Pasowały by dwa małe śmigła kręcące się w przeciwne strony niwelujące momenty żyroskopowe.
-
Ten napęd z pierwszego posta się nie nadaje, głównie dlatego, że można w nim zastosować śrubę o średnicy max 35 mm, do tego bardzo mało zanurzoną..
Z tak dużą platformą na pewno sobie taka nie poradzi, będzie mieliła wodę , o żadnym ślizgu nawet mowy nie ma.
A co byś radził ?
-
Nie wiem czy dobrze czytałeś , ale tam nie ma silnika i śruby. Dokupując silnik bedziesz miał najdroższy naped w zestawie .
Franciszku oczywiście dobrze czytałem i mam już dobrany zestaw z trzy fazą. Jest to faktycznie droga rzecz, ale wygoda (wygodny montaż i sterowanie, łatwa regulacja zanurzenia śruby, możliwość przenoszenia między modelami) w tym wypadku kosztuje. Ale jeszcze myślę.
Stosując silnik zaburtowy mam cały pokład katamarana wolny dla siebie. Jest gdzie postawić kamery, zrobić wygodny luk na pakiety i elektronikę. Można byłoby też umieścić dwa silniki w pływakach, ale będą już na stałe i nie mają możliwości regulacji zanurzenia śruby. Nie wiem jak będzie zachowywał się model na pływakach lotniczych, jak mocno będą zanurzone w wodzie śruby przy poszczególnych zakresach prędkości więc silnik z możliwością regulacji zanurzenia jest tu jak najbardziej tu na miejscu.
-
Tak, silnik jest mocny bo model powinien mieć możliwość wejścia w ślizg, ale przecież nie trzeba pływać na max. gazie. Silnik jest zaburtowy bo tak pasuje mi do koncepcji katamaranu. "Wydmuszka" ma ceramiczne wyłożenie napędu wału. Ale to akurat jeszcze nie kupione.
Też myślałem o gotowym modelu, ale to będzie już typowa zabawka a mnie zależy na platformie do filmowania. Platforma ma być stabilna na boki i wzdłuż, nie chlapać na obiektyw przy pływaniu i zapewniać możliwość łatwej modyfikacji oraz przezbrajania. Będzie to prototyp i to mnie w tej konstrukcji pociąga. Rozważam też napęd śmigłowy jako alternatywny i eliminujący zawijanie się wokół śruby wodnych roślin.
Ale oczywiście Wasze głosy są cenne
-
1
-





















"Popylacz" z modelesuchocki.pl - czyli jeden model w kilku odmianach
w Konwersje spalin na elektryki i elektryczne "giganty"
Opublikowano
Przegrzany silnik - praktycznie
Silnik elektryczny łatwo jest w modelu przegrzać. W efekcie otrzymujemy spadek mocy napędu lub jego uszkodzenie mechaniczne.
Przy zbyt wysokiej i długotrwałej temperaturze osłabieniu ulegają magnesy neodymowe i łatwo zauważyć wtedy że silnik traci "kompresję". W skrajnym przypadku magnesy te odklejają się, powodując mechaniczną blokadę wirnika względem stojana.
W obydwu przypadkach silnik zostaje uszkodzony trwale i nawet po naprawie nie ma już takiej mocy jak nowy egzemplarz.
Modele latają w rożnych warunkach - w zimie, w lecie, więc różnice temperatur otoczenia mogą dochodzić do 40 stopni Celsjusza. Ilość oddawanego ciepła zależy od różnicy temperatury (tzw. delty) otoczenia i temperatury silnika. Temperatura silnika nie powinna być wyższa niż 60 stopni (można jeszcze wytrzymać ręką). Latając w zimie mamy deltę 60 stopni na chłodzenie a w upalny dzień już tylko 30-20.
Ażeby chłodzić nasze napędy trzeba dodatkowo wymusić przez nie przepływ powietrza. Silnik elektryczny chłodzi się centralnie (przepływ powietrza blisko osi silnika jak najbliżej uzwojeń) w przeciwieństwie do silników spalinowych gdzie chłodzony jest cylinder lub cylindry rozmieszczone na obwodzie silnika.
Dlatego wszystkiego rodzaju kołpaki i szczelne zabudowy makietowe mocno utrudniają chłodzenie silnika elektrycznego. Kołpak rozbija powietrze na boki i omija ono wtedy schowany za nim napęd elektryczny a szczelna obudowa maski silnika utrudnia wymianę powietrza w ogóle.
cdn..