






Pioterek
-
Postów
3 554 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
18
Odpowiedzi opublikowane przez Pioterek
-
-
Na koniec każdego lotu możemy otrzymać jego zestawienie statystyczne:

Ciekawą pozycją jest efektywność podająca ile mAh zużywamy na przelot 1 km.
-
No i dzisiaj odbył się oblot modelu z wyposażeniem FPV. Miało być według wczorajszej prognozy 1 m/s, a było jak zwykle czyli wiatr w poprzek lotniska a momentami wiatr "łeb urywał" przy ziemi 7-8 m/s.
Były chwile względnej ciszy i taki moment wykorzystałem na start. Najpierw parę zdjęć na ziemi "na wszelki wypadek"
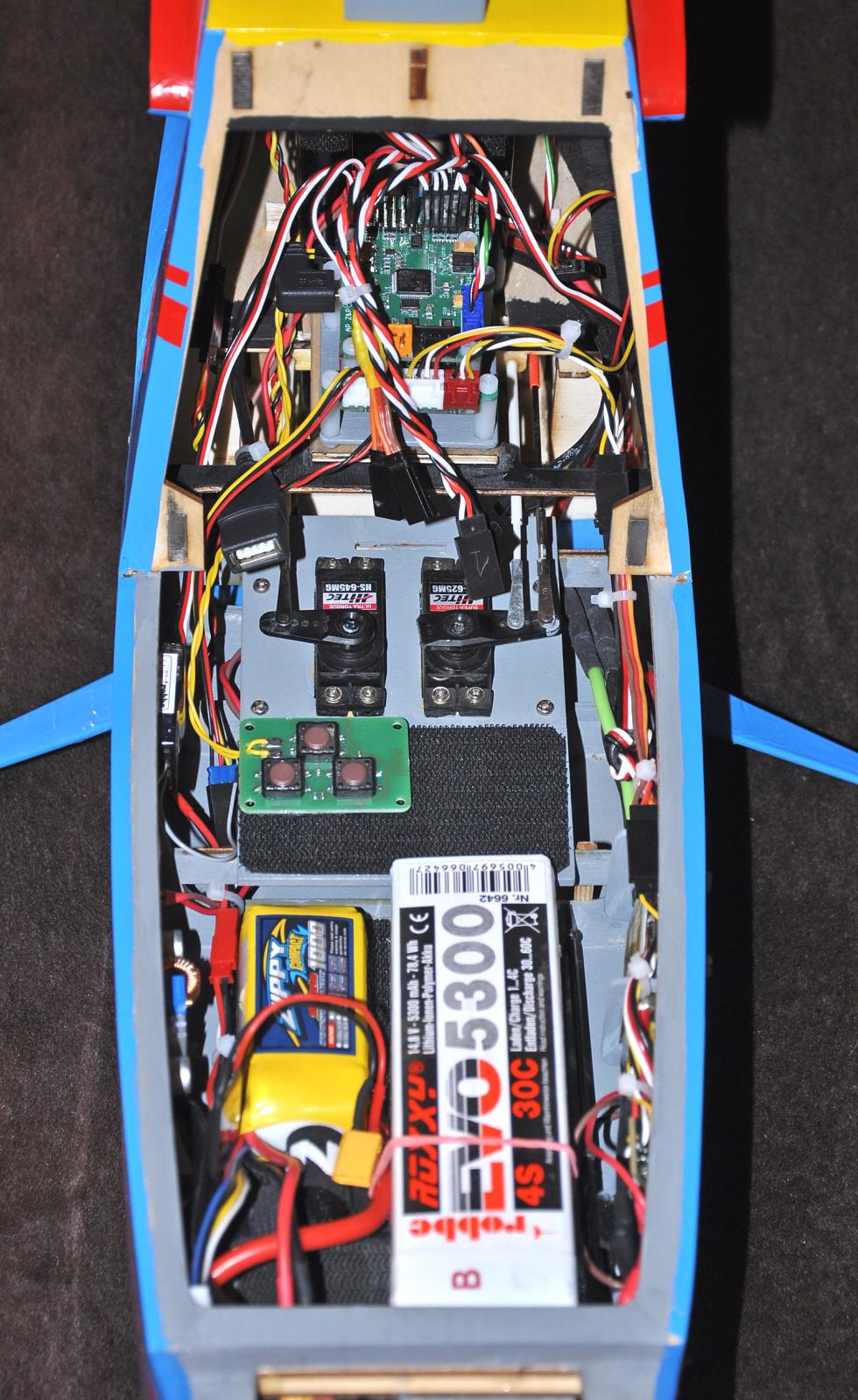
Potem parokrotne sprawdzenie kierunków sterów i kierunków działania stabilizacji czy przypadkiem nie odwrotnie - sprawdzałem to już w domu, ale na lotnisku jeszcze raz nie zaszkodzi. Potem kołowanie po lotnisku czy model trzyma kierunek przy ukośnym względem wiatru kursie. Do modelu załadowałem cięższy niż poprzednio i pakiet 4S 5300 mAh, ponieważ musiałem skompensować wyważenie modelu - nadajnik FPV umieszczony na ogonie dociążył mi tył. No i wreszcie najważniejsza czynność, zapisanie do modelu jego pozycji GPS BAZA choć model robi to też sam przy każdym uruchamianiu się systemu podobnie jak jest to w multikopterach.
A więc do góry - tryb lotu Manual. Start elegancki, ale zaraz potem uwolniona z żyroskopów Prząśniczka pokazała swój pazur. Wiedziałem że lekko nie będzie, ale mimo to parę pierwszych kółek wykonałem z "najwyższą uwagą" . Uroku moim poczynaniom dodawał szalejący u góry wiatr, co mimo sporej masy modelu było wyraźnie widać. W końcu połapawszy się o co biega w locie ręcznym przełączyłem lot w tryb Autopilota. Sam model uspokoił się (ale nie wiatr), zmalał efekt żyroskopowy ale model trudniej zakręcał w lewo. A więc lądowanie i regulacja. Kolejny lot i następna regulacja. Na następne korekty muszę jednak poczekać na spokojniejszy dzień.
Klatka z filmu
Prząśniczka ma jedną nieprzyjemną cechę - nie ostrzega przy przeciągnięciu, tylko od razu wali się na skrzydło. Miałem taka sytuację dzisiaj w locie z Autopilotem. Wyhamowałem za bardzo model pod wiatr i efekt się zaczął. Szczęśliwie spora wysokość (latałem profilaktycznie na 50 m) moja spokojna reakcja i praca Autopilota na lotkach po dwóch wahnięciach przywołała model do porządku. Udało mi się sfilmować nawet ten moment. Wylądowałem modelem trochę zestresowany. Mała poziomnica budowlana położona na belce ogonowej pomogła ustawić mi dokładnie horyzont na którym opiera się poziomowanie modelu przy Autopilocie. Przy poprawnej pracy Autopilota, modelu nie powinno się dać przeciągnąć - po zaciągnięciu steru SW model wznosi się następnie sam oddaje ster dla wyrównania lotu. Jeżeli dalej trzymamy SW zaciągnięty sytuacja się powtarza. Pozostałe parametry (siła stabilizacji pionowej i max wychylenie pion) muszę zrobić przy spokojnej pogodzie. Poprzedni model FPV Ranger EX przy włączonym Autopilocie nie daje się przeciągnąć. Czy będzie tak z Prząśniczką zobaczymy.
Po za tym dalsze loty odbyły się bez niespodzianek. Na podsumowanie jeszcze za wcześnie.
Spróbowałem lotu z zatrzaśniętym kursem i wysokością oraz automatyczny powrót do pozycji Baza. Wszystko działa.
Jednego pakietu wystarczyło mi na 15 min lotu - 30% jeszcze zostało. Myślę, że w przyszłości po nabraniu wprawy 20 min lotu nie będzie za dużo.
klatka z filmu
Mimo szalejącego wiatru pogoda była wspaniała, więc na plażę wybiegły stadnie szybowce:
a niektóre latały:
no cóż dużemu łatwiej
-
-
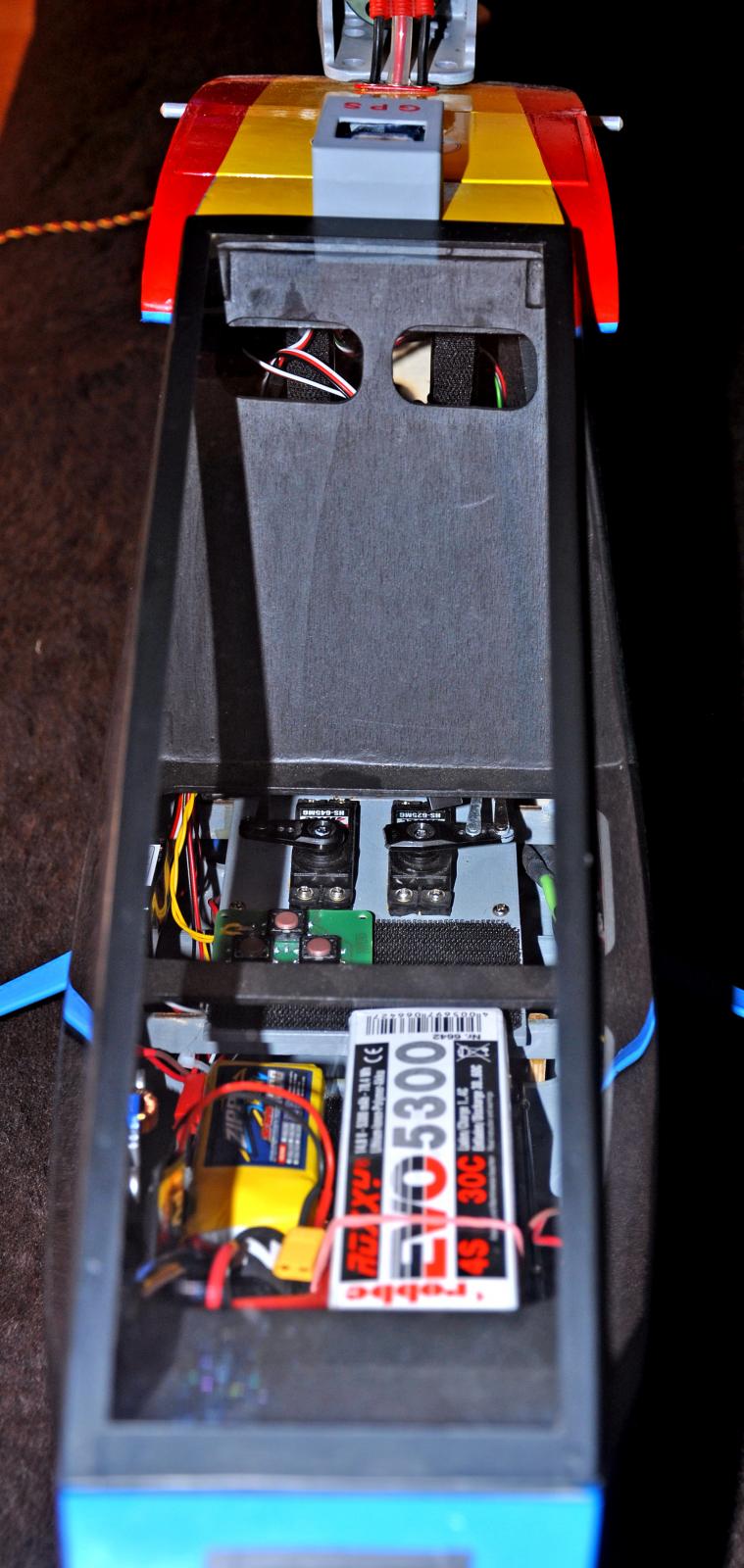
W końcu cała elektronika powędrowała do kadłuba Prząśniczki
po zamknięciu kabiny
-
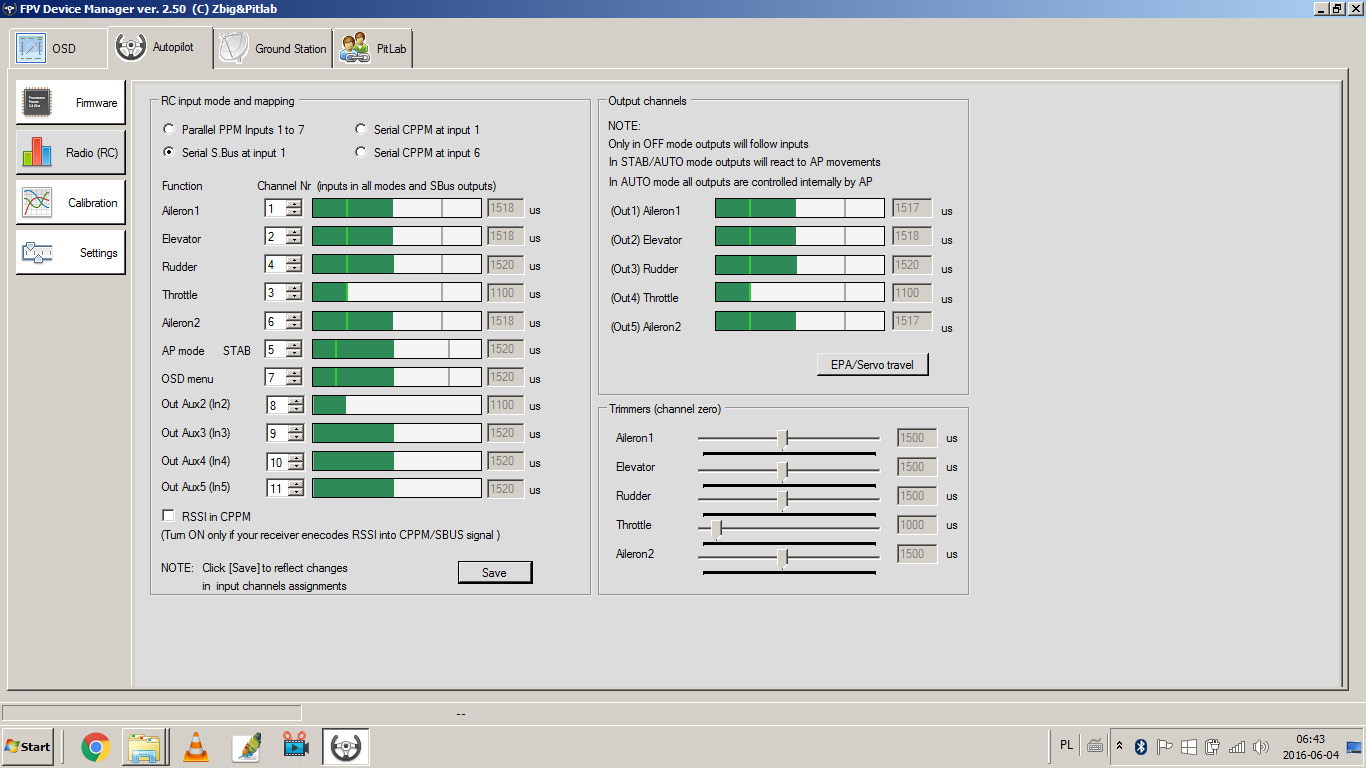
Konfiguracja radia:
Mój odbiornik pracuje po SBUS. Do dyspozycji mam 11 kanałów bo tyle obsługuje bezpośrednio Pitlab. Konfiguracja dla Prząśniczki J1M i Rangera EX są takie same
lotki 1 i 6 kanał
wysokość 2 kanał
gaz silnika 3 kanał
ster kierunku 4 kanał
przełącznik pracy Autopilota 5 kanał na 3 pozycyjnym przełączniku
przełącznik OSD Menu 7 kanał na 3 pozycyjnym przełączniku
klapy kanał 8 (Out Aux 2)
stroboskop kanał 9 (Out Aux 3)
wolne kanał 10 i 11 (Out Aux 4 i 5)
Kanały można przypisać inaczej. Tak jest dla odbiorników posiadających SBUS lub z sygnałami CPPM. W przypadku łączenia równoległego mamy do dyspozycji tylko 7 kanałów w Pitlab - ew. resztę podłączamy wprost z odbiornika.
Trzeba wybrać rodzaj transmisji z odbiornika do Pitlab zaznaczając odpowiednie pole. Naciskamy przycisk SAVE i system już wie z jaką wymianą danych będzie miał do czynienia. Zaczyn być widoczna na ekranie praca drążków nadajnika.
Ruszając drążkami i przełącznikami ustawiamy tak EPA w nadajniku, aby zakresy wychyleń pasków na ekranie dla każdego kanału mieściły się pomiędzy cienkimi liniami. Następnie przechodzimy do zakładki EPA/Servo travel i wychylamy widoczne w polu drążki i przełączniki (kalibrujemy) sygnały. Zapisujemy kalibrację do Autopilota /Save. Autopilot jest gotowy do montażu w modelu.
Zakładka Calibration nie będzie nam potrzebna, ponieważ otrzymujemy nowy układ już w pełni skalibrowany.
-
Piotrze, zapomniałeś o napisie CGE
Wiesz, te napisy nie są tak całkiem do końca bez sensu. Zdarza mi się czasami bywać na spotkaniach w większym gronie, a że ta technika budzi zainteresowanie wśród oglądających, łatwiej mi wytłumaczyć działanie takiego wieloelementowego układu używając skrótów czy opisu.
A co to jest CGE ?
Dawno Ciebie tu nie było - pozdrawiam serdecznie
-
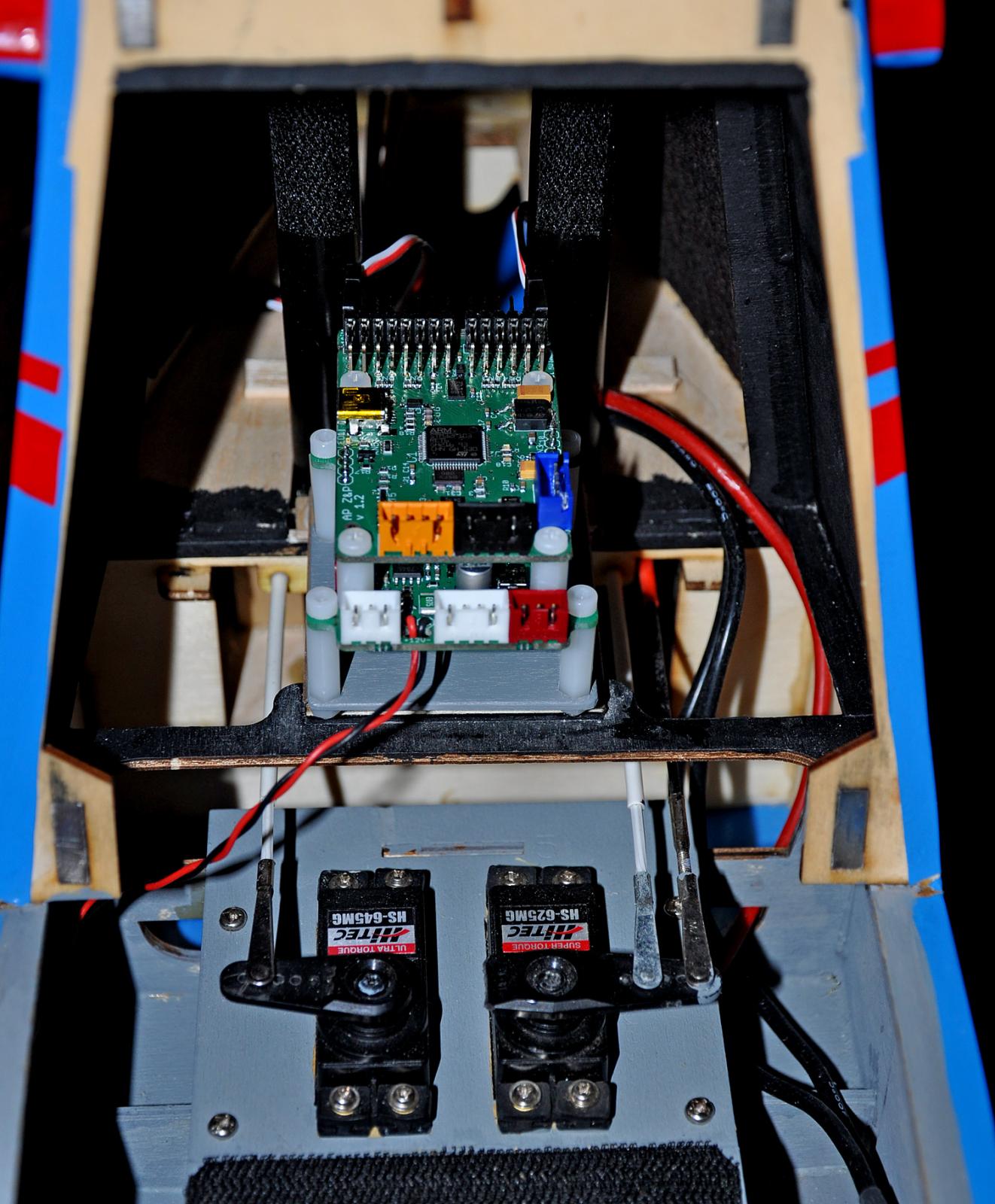
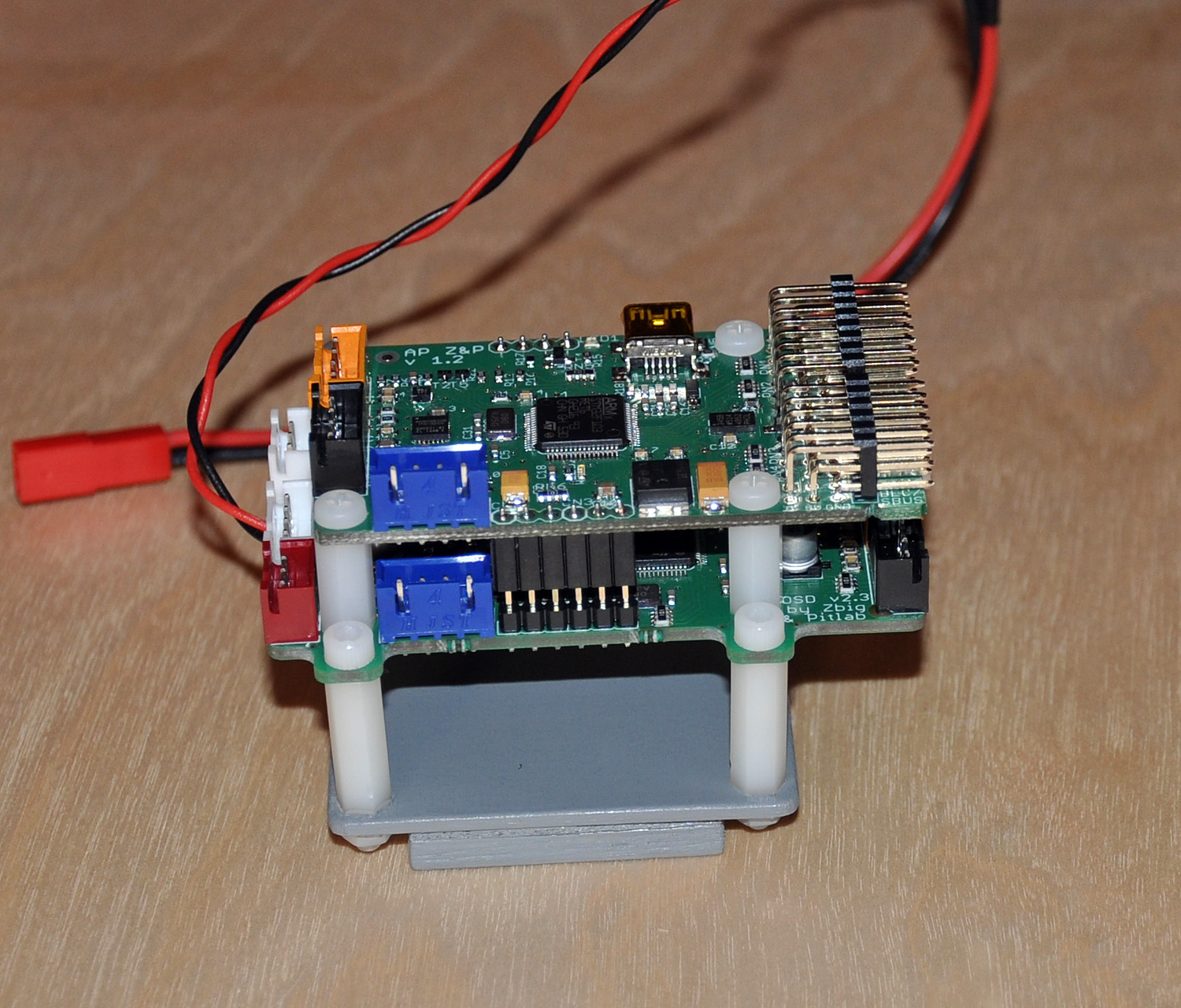
Po dokładnych przymiarkach "kanapki" w modelu okazało się, że kable wychodzące z płytki Autopilota ledwo mieszą się z w dysponowanej przestrzeni. Wtyczki serw włożone poziomo powiększają ogólny wymiar płytki i bardzo trudno będzie nimi operować po zamocowaniu kanapki na stałe na gumie wibro-izolacyjnej. Ech, gdyby tak piny w płytce umocować pionowo - byłby sam miód.
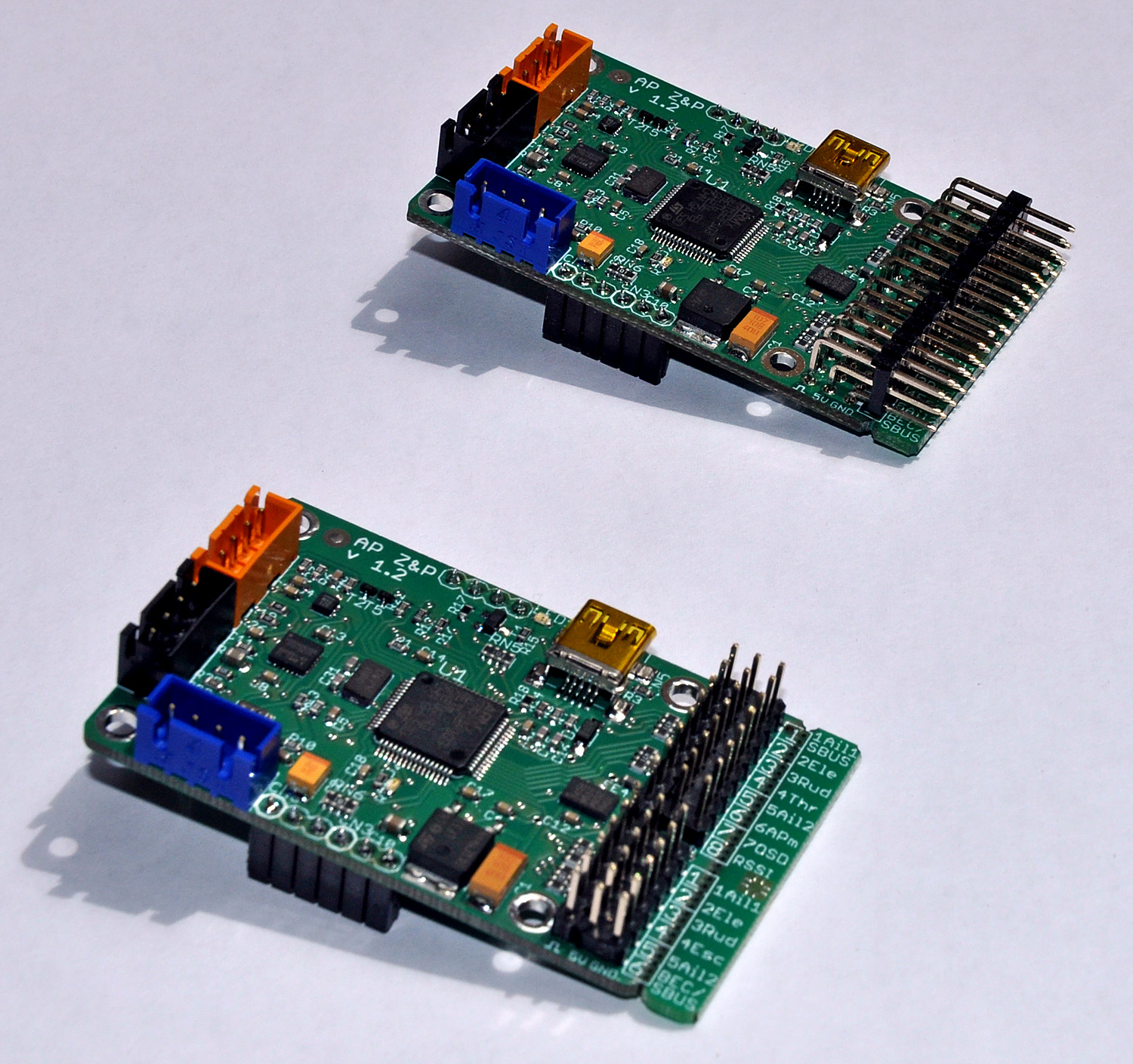
Zadzwoniłem więc wczoraj do "Pitlaba" do Pana Piotra i zapytałem o możliwość wymiany płytki AP na bardziej mi pasująca.
I co ..... dzisiaj dostałem nową płytkę z pinami na sztorc. To się nazywa załatwienie sprawy
U Chińczyka nie byłoby to możliwe !
zdjęcie z "problemem"
nowa i stara płytka
Myślę, że jest kolejne potwierdzenie, że z "Pitlabem" warto.
-
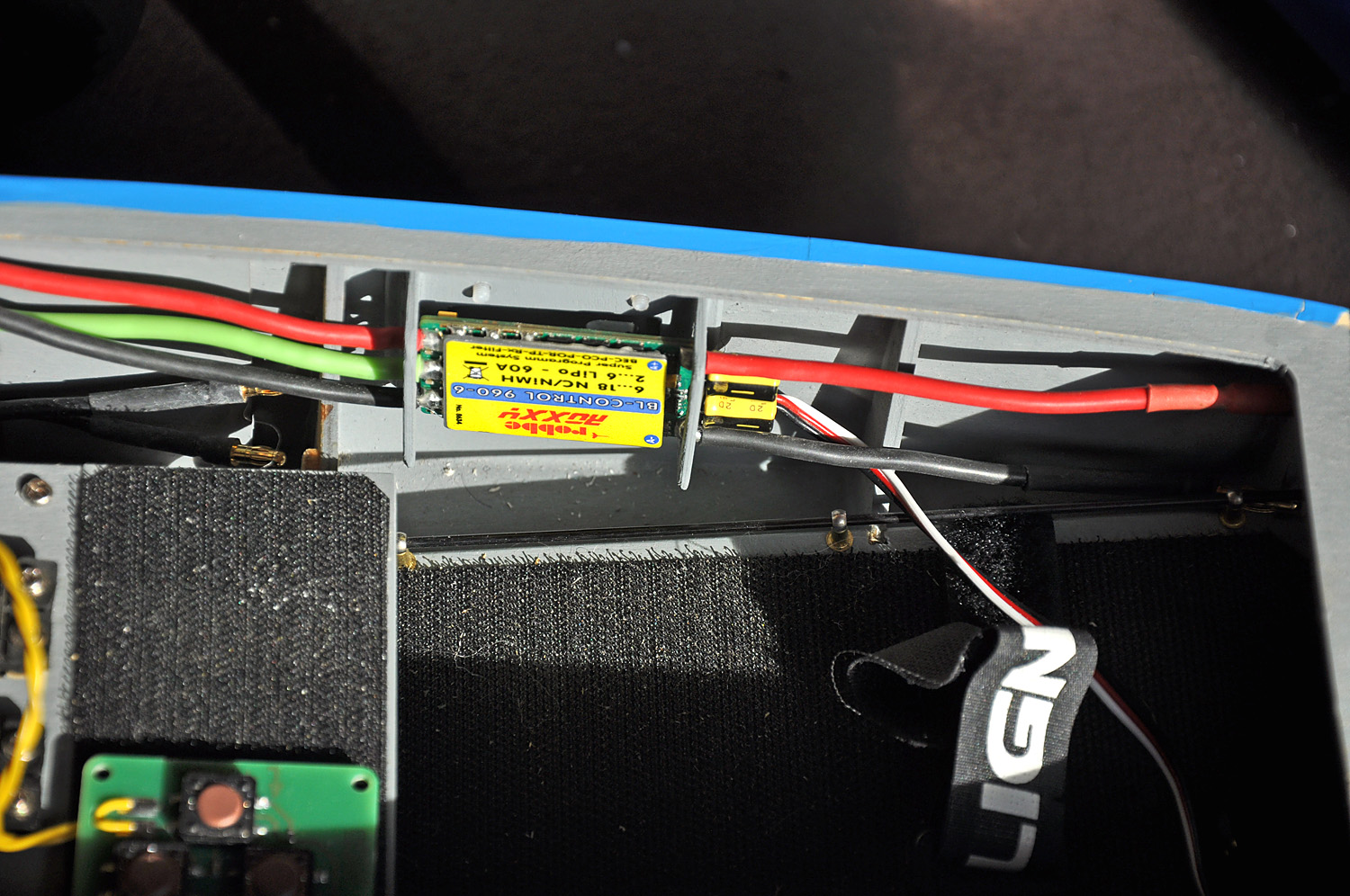
Mocowanie regulatora:
Konstrukcja do mocowania regulatora w pozycji pionowej zapewnia jego prawidłowe chłodzenie
i regulator zamocowany na burcie w modelu
-
Zamocowałem moduł GPS
-
Ładna historia i dobrze się zapowiada. Dajcie Wicherkom nowe życie ☺
-
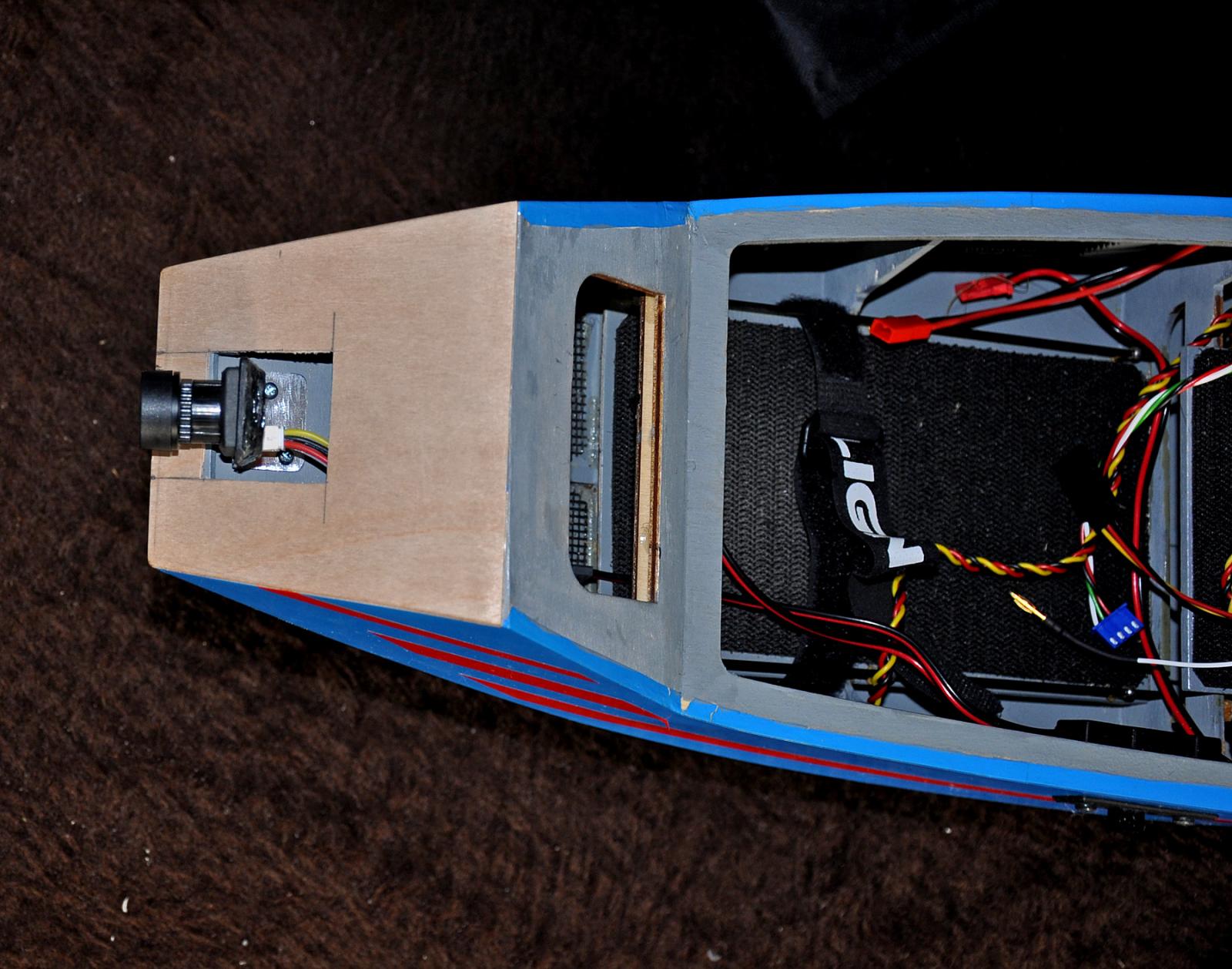
Kamera z domkiem. Domek zapewnia też na ile to możliwe, osłonę przed padającym ukośnie słońcem. Tor Video już działa
-
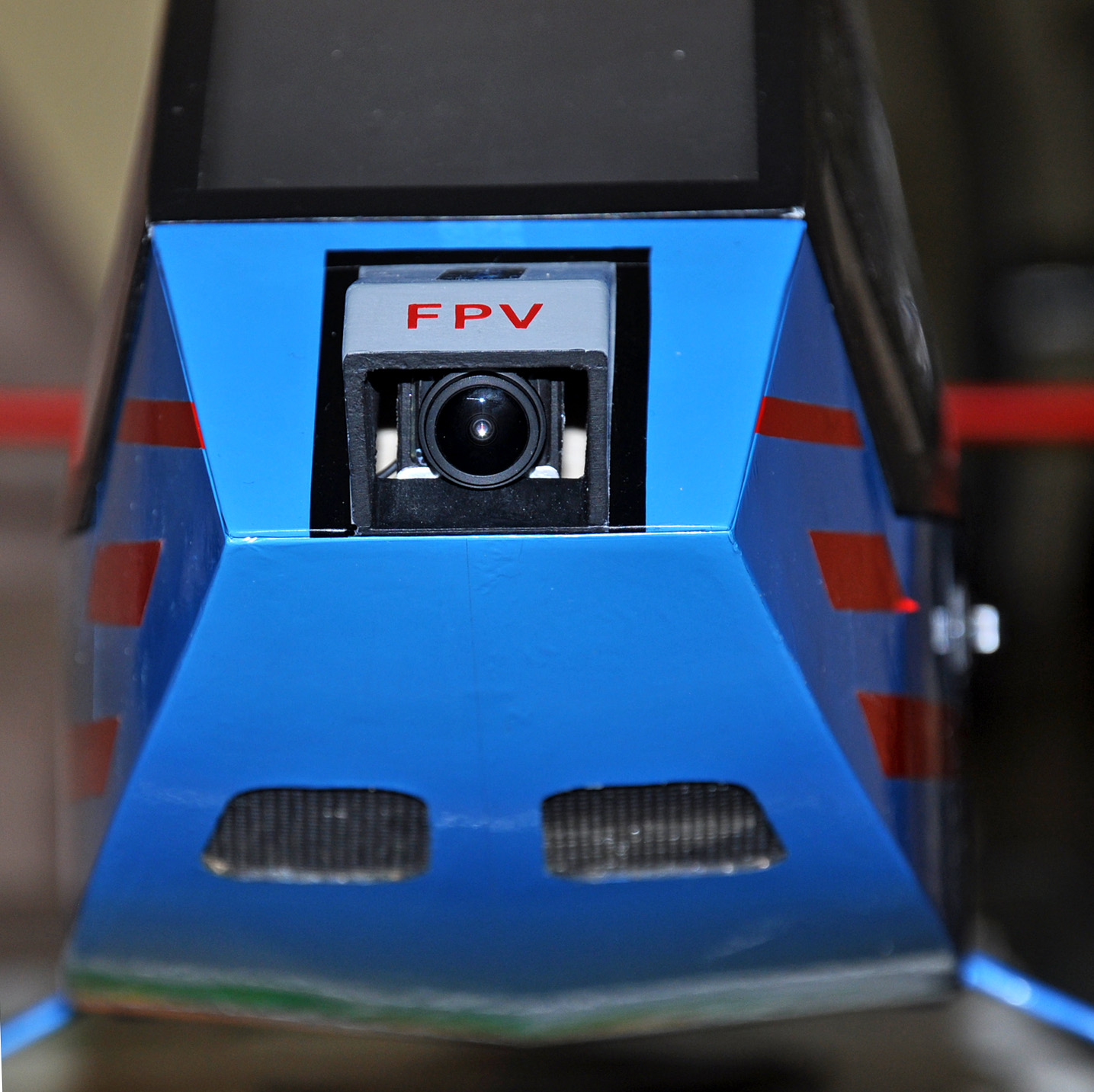
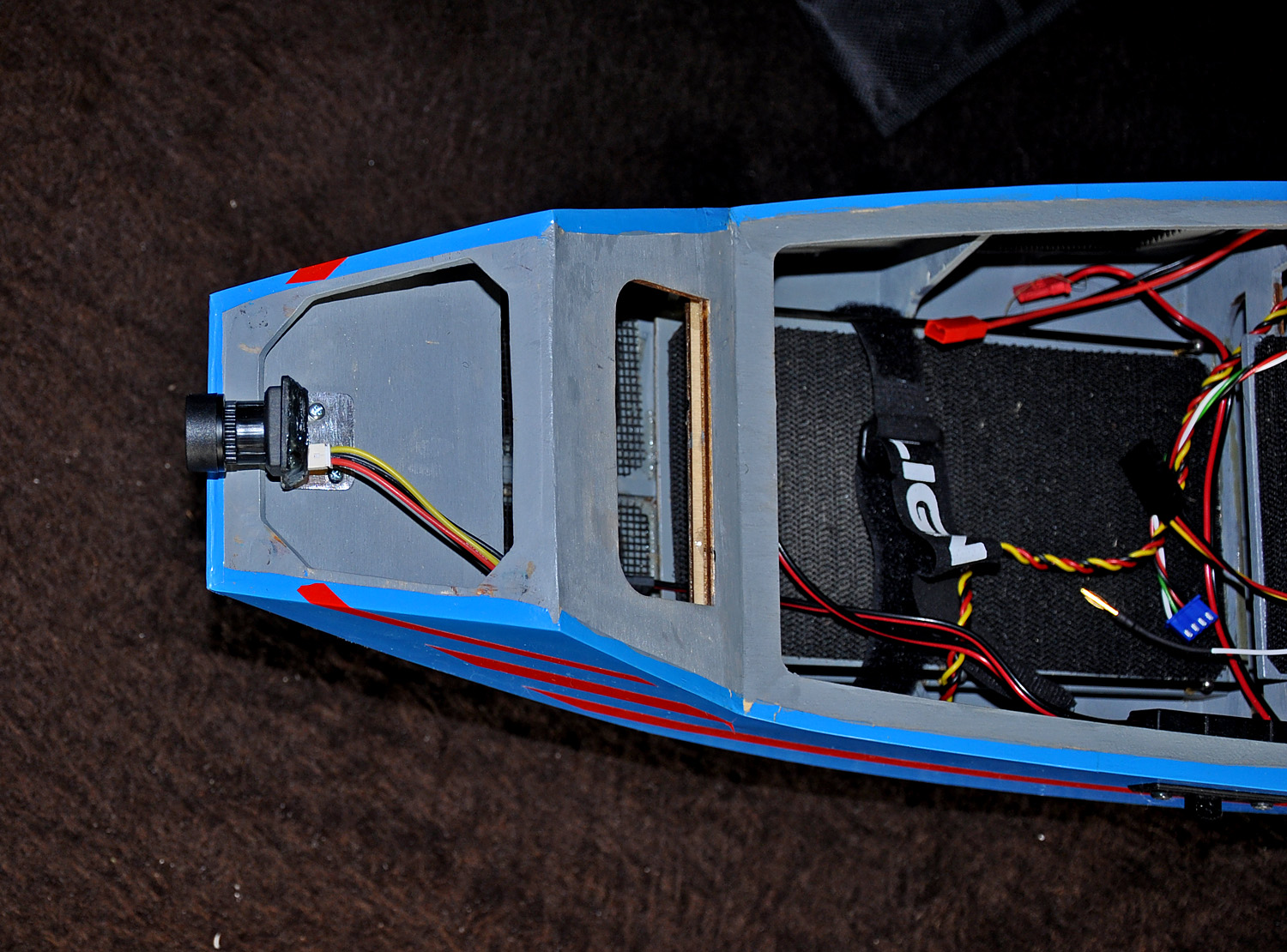
Kamera FPV - kamerę zamocowałem na dziobie modelu. Kamera zamocowana jest na odginanej blaszce aluminiowej którą dognę lub odegnę gdyby była potrzeba regulacji kąta patrzenia kamery na ziemie. Miejsca jest dużo i można by nawet pomyśleć nad małym serwem wychylającym kamerę FPV. W Rangerze EX stałe ustawienie kamery mi nie przeszkadzało, ale tu może w przyszłości zastanowię się nad takim rozwiązaniem. Wolnych kanałów jest dużo. Kamera będzie przykryta klapką z domkiem, który się właśnie klei.
-
Mocowanie nadajnika FPV na ogonie modelu:
Mocowanie nadajnika jest niesymetryczne, żeby podczas lotu powrotnego kadłub modelu nie zasłaniał całkowicie anteny.
Do stanu poprzedniego można wrócić zakładając mocowaną 3 wkrętami oklejoną na niebiesko zaślepkę ze sklejki .
-
Przytargałem model z garażu i odkurzyłem - od razu pojaśniał.
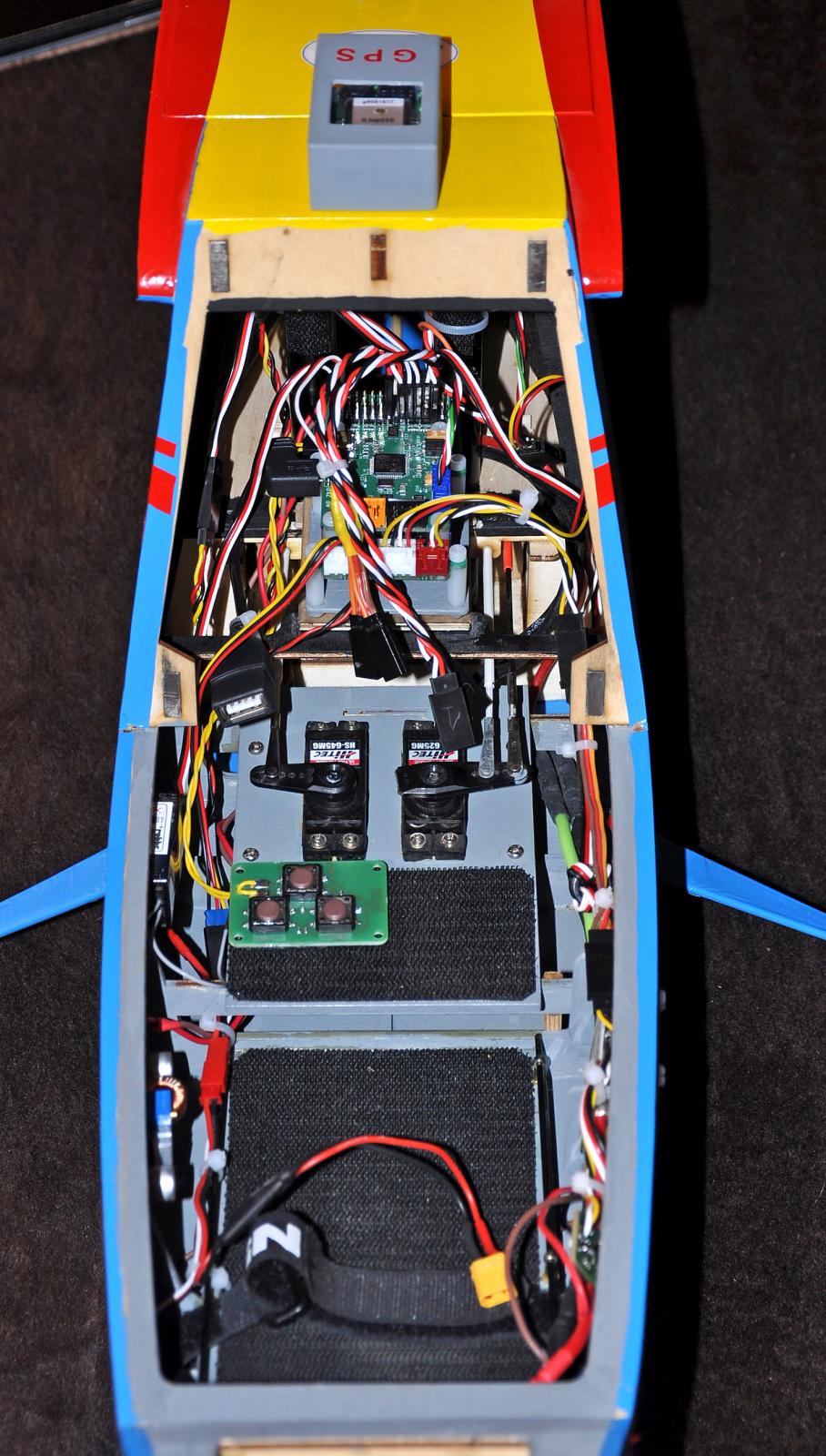
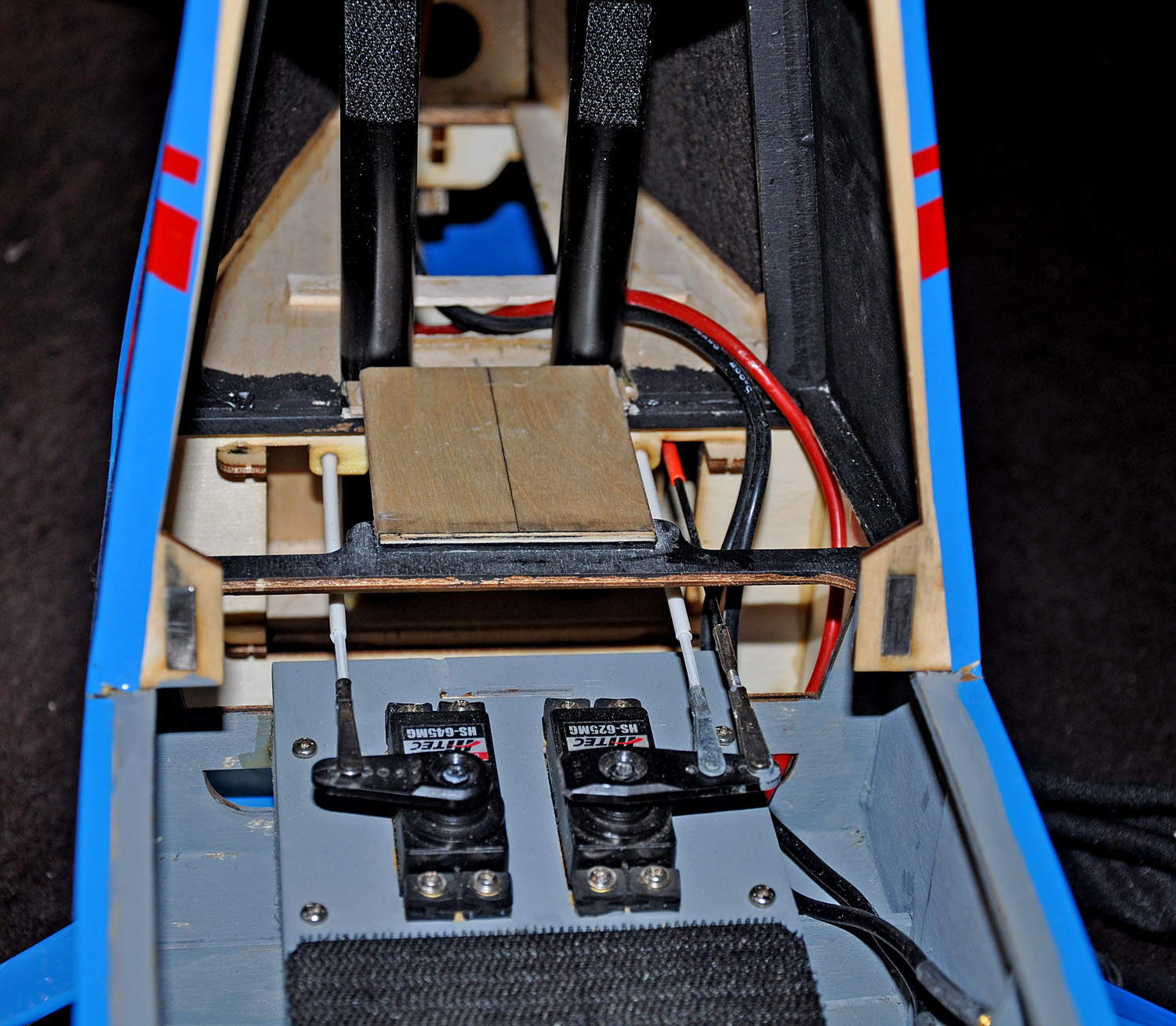
Zdjąłem stare wyposażenie RCPrząśniczka ma dużo miejsca w kadłubie. Dlatego układ "Pitlab&Zbig" znalazł się prawie pod środkiem ciężkości tak jak powinno być:
półka pod kanapkę Pitlaba:
i na półce
-
7,4V to 7,4V
Te 2S to chyba "chłyt" marketingowy. Nie można pracować na granicy możliwości specyfikacyjnej urządzenia a nawet sporo powyżej.
Reklamować trzeba, ale latać na 8,2V to raczej ryzykowne.
-
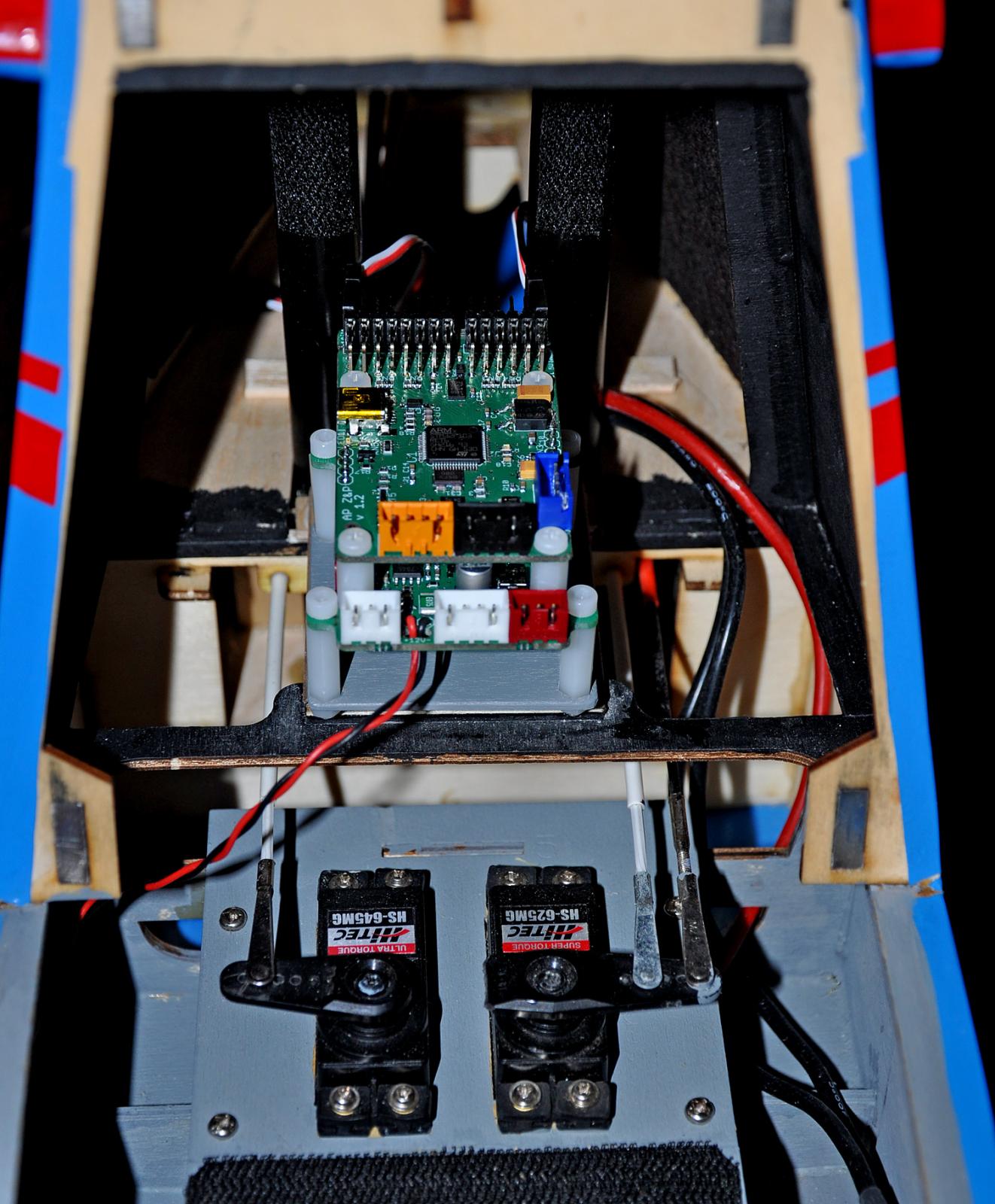
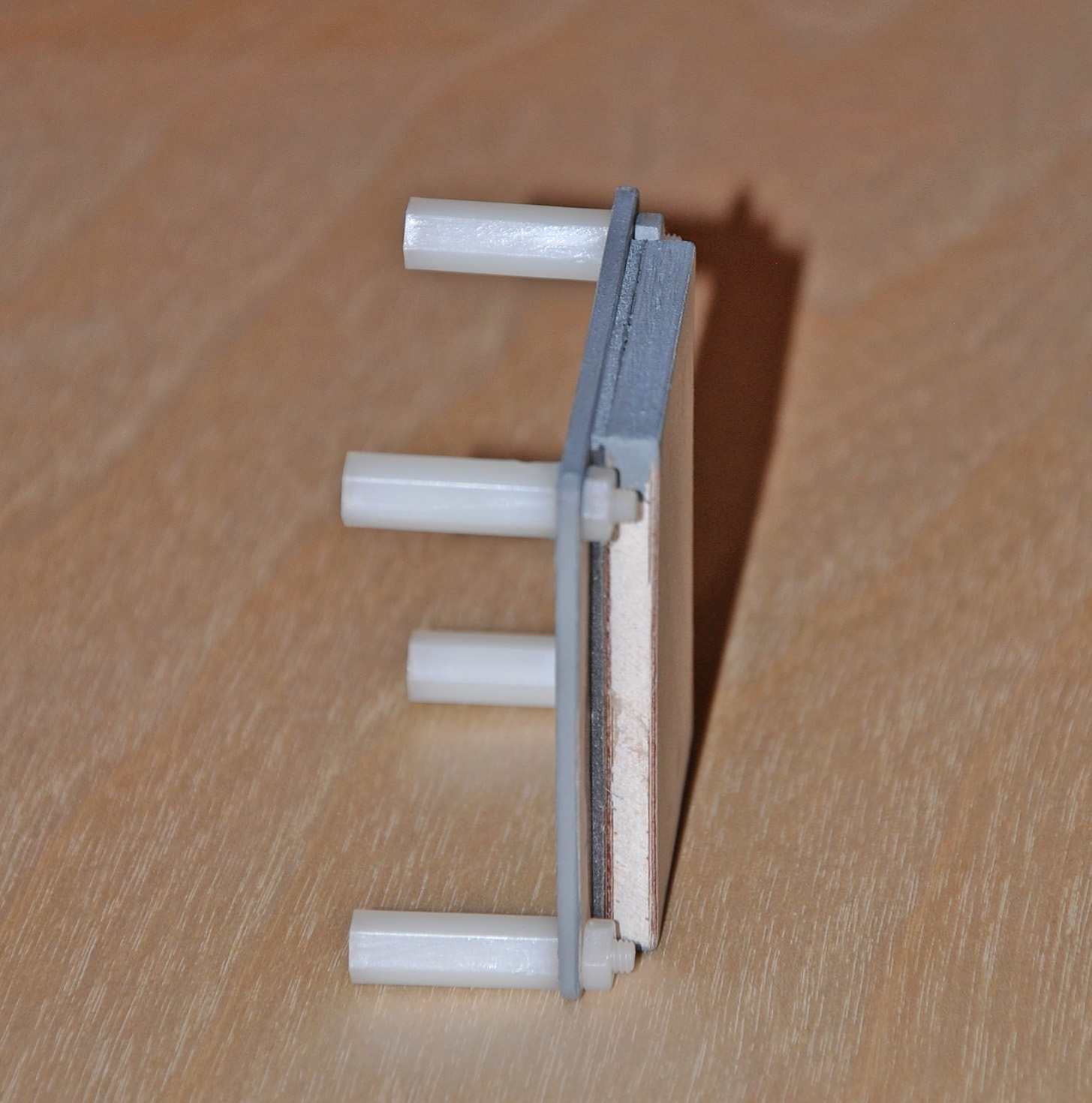
Wyposażanie Prząśniczki w funkcje FPV zacząłem od budowy mocowania kanapki "Pitlab&Zbig" w modelu. Jest to istotny element ponieważ oprócz samego mocowania musi też tłumić ew. drgania od napędu - im bardziej tym lepiej. Mocowanie kanapki powinno być oparte o niemagnetyczne np. plastikowe wkręty, żeby nie wpływały na wskazania kompasu. Podstawę wykonałem z 2 mm sklejki i 5 mm dystansu. Dystans to 3 mm balsa oklejona sklejką 0,8 mm z dwu stron. Dystans z podstawą przyklejone są dwustronnie klejąca antywibracyjną mikro gąbką firmy 3M. 3 mm balsa też stanowi pewien element tłumienia. Podstawa będzie przyklejona na stałe do półki w modelu również poprzez gąbkę 3M.
Gotowe mocowanie - widać jego strukturę
mocowanie po przykręceniu do kanapki Pitlaba
Znalazłem w końcu odpowiedni kabel USB/USB mini ułatwiający podłączanie modelu do komputera.
-
Dzisiaj Ranger EX był w Zamościu. Jako ciekawa technologia latania model i osprzęt budził zainteresowanie.
Ja latam a inni podglądają
Lądowisko to kawałek placu przed hangarem - trza było celować
Obraz na monitorze i OSD Pitlaba mimo pełnego słońca jest dobrze widoczny.
odkurzyłem model i poleciałem moja quardą
I na koniec załapaliśmy się na zdjęcie grupowe
Niestety w drodze powrotnej wstąpiliśmy do zajazdu na flaki i model został na słońcu w rozgrzanym samochodzie - efekt czarna kabina Rangera się trochę odkształciła.
-
Dzisiaj Adam był ze swoim z Żelaznym w Zamościu. Model prezentuje się i lata pięknie.
-
 1
1
-
-
Spoglądam nie raz z sentymentem na stojąca w garażu moją Prząśniczkę J1M. Myślę, że przyszedł czas na wykorzystanie tej bardzo stabilnej platformy jako modelu FPV. Będę mógł tu wykorzystać swoje doświadczenia zdobyte na Rangerze EX. Autopilot i OSD również będą z "Pitlab&Zbig".
Edit:
Od samego początku tworzenia modelu miałem zamiar wykorzystywać go również jako platformę do filmowania z powietrza. Jednak kamery Full HD wchodziły dopiero na rynek a FPV to były dopiero początki. Dzisiaj mam już odpowiednie wyposażenie, więc chyba nadszedł czas zrealizować swoje plany. Bardzo jestem ciekawy jak sobie poradzi system stabilizacji lotu Pitlab z dość "krnąbrnym modelem" jakim jest Prząśniczka. Dla przypomnienia, dla mojej wygody model używa obecnie 3 żyroskopów Futaby GYA 430 konfigurowanych osobno do lotu oraz startu i lądowania. Żyroskopy te po pozytywnym oblocie modelu w nowej roli, chętnie odstąpię po przystępnych cenach (ew. kontakt na PW).
-
Wykonałem pierwsze filmy z kamerą Sony HDR-AZ1VR . Kamera zamocowana na sztywno do modelu. Kolory bardzo ładne, drgania ledwo zauważalne (ale był spory wiatr) natomiast ostrość detali terenu w porównaniu z Mobiusem gorsza z powodu włączonego systemu Steadyshot. Będę musiał ten system do lotów wyłączyć a samą kamerę zamocować ma amortyzatorach - wtedy powinienem uzyskać to czego się spodziewam.
Wyważenie modelu prawie się nie zmieniło.
-
Ranger z małą kamerą Sony HDR-AZ1VR Action Cam w próbach. Kamera z obudową waży 98 g, ma pilota, podgląd na WiFi i możliwość obrócenia obrazu o 180 stopni, co w moim mocowaniu jest bardzo wygodne. Oczywiście jest i stabilizacja obrazu.
-
1
-
-
Nowy film nakręcony moim Mobiusem A - platforma Ranger EX 2,0 m
-
Dzięki Kuba za ocenę - parę wypraw ekstra na lotnisko mi to zajęło
.
i nawet Żonie się spodobało ☺ -
Trochę czasu zajęło mi przygotowanie Rangera do filmowania z powietrza. Przy filmowaniu Mobiusem pojawiały mi się drgania obrazu. Musiałem więc nad tym trochę popracować. Ranger ma kadłub cienkościenny, który pracuje trochę jak pudło rezonansowe gitary. Był zakres obrotów silnika, w który wyraźnie drgania się nasilały. Prace nad tym problemem poszły w paru kierunkach:
- zlikwidowałem w lotkach zawiasy z taśmy klejącej i zastąpiłem je zawiasami kołkowymi. Ze względu na napęd lotki z jednego boku (nie symetrycznie) zawiasy z taśmy miały tendencje do częściowego odklejania się i pogarszały precyzję stabilizacji.
- ograniczyłem do minimum drgania napędu poprzez mocowanie wieżyczki silnika na klej silikonowy i zastosowanie lekkiego, dokładnie wyważonego śmigła węglowego 10x4,5 (oryginał 10x5) zapożyczonego z napędów multikopterowych.
- i wreszcie odpowiednie mocowanie kamery na piankach oraz regulacja autopilota "Pitlab&Zbig" dopełniły reszty na tyle, że byłem z jakości obrazu już zadowolony.
Efekty przedstawiam na filmie - Ranger EX w akcji:
Obecnie model można uznać za w pełni przygotowany do zaplanowanych funkcji. Rangerem lata się bardzo przyjemnie i bezpiecznie.
Jak chcemy się powozić po niebie bez sensu, to jest właśnie to
. Warto było włożyć trochę wysiłku ażeby go porządnie przygotować do lotów. Mimo, że to styropian, radości z latania daje równie dużo jak inne konstrukcje. Bardzo ciekawe jest zachowanie się modelu na przerobionych klapach. Po otwarciu klap i zamknięciu gazu model zaczyna tracić wysokość i jak winda opada poziomo w dół. Wykorzystuję ten efekt do obniżania i kontrolowania wysokości przy lądowaniu. Metr nad ziemią zamykam klapy i model łagodnie ląduje na małej prędkości.

































Ranger EX 2.0 m FPV z Volantex RC + "Pitlab&Zbig"
w Konwersje spalin na elektryki i elektryczne "giganty"
Opublikowano
Myślę że przyszedł czas na podsumowanie tematu Rangera EX. W sumie zrobiliśmy z modelem kilkanaście wypraw na lotnisku a model przeleciał bezawaryjnie ponad 300 km.
Po paru dokonanych po fabryce poprawkach, mogę z czystym sumieniem polecić ten model jako bardzo przyjazne "latadło" FPV.
Ranger EX jest bardzo bezpieczny, nie da się go przeciągnąć. Raz mimo woli zafundowałem modelowi lot bez podłączonych lotek - trochę się dziwiłem jego zachowaniu w powietrzu, ale udało mi się Rangera sprowadzić bezpiecznie na ziemię i gładko wylądować. Wtedy dopiero zobaczyłem, że kable od lotek nie były spięte. Mimo, że model nie ma wzniosu dał się poprowadzić tylko na samym sterach SW i SK - jak Wicherek . Po tym zdarzeniu bardzo polubiłem model i nabrałem do niego zaufania. Dlatego nie bałem się już później podczepiać do modelu nawet małej kosztownej kamery Sony. Również niezawodnie spisał się system FPV "Pitlab&Zbig".
. Po tym zdarzeniu bardzo polubiłem model i nabrałem do niego zaufania. Dlatego nie bałem się już później podczepiać do modelu nawet małej kosztownej kamery Sony. Również niezawodnie spisał się system FPV "Pitlab&Zbig".
W majowym numerze Modelarza ukazała się cz 1 opisu "FPV od kuchni" z Rangerem w roli głównej. Kolejne odcinki będą opisywać moje doświadczenia z "Pitlabem" i lotami FPV. Będą po kolei 4 części opisu.