






Pioterek
-
Postów
3 554 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
18
Odpowiedzi opublikowane przez Pioterek
-
-
Po przygotowaniu lotniska i ja serdecznie zapraszam, będzie dla Twojego modelu bezpieczniej.
Odpowiedź dla Pietki na PW.
-
Widziałem, myślę że z tym profilem powinien ładnie latać.
-
Wiesz może jaki profil ma płat tego Mustanga ?
-
Dzisiaj pada, więc nakleiłem czekające już jakiś czas napisy na skrzydła. Wyszło tak:

-
Oblot planuje na lotnisku w Dęblinie czyli pas asfaltowy.
Jak się nie uda to w Radawcu na trawce, ale to ostateczność.
Radawiec szczerze odradzam - póki co trawa po pas - brak gospodarza.
Pytam o rodzaj nawierzchni, bo zastanawiam się czy mocy starczy na wyrwanie modelu z trawy. Pas asfaltowy jak najbardziej.
-
Skończyłem uzbrajać Iskrę.
Ponieważ brakuje tylko kabinki i kawałka folii to zważyłem model. Wyszło 2800g.
Czyli na gotowo wyjdzie 2900g.
Ciąg maksymalny 1800g.
Powierzchnia 0,33m2 czyli obciążenie w granicach 100, czyli wolno to nie będzie lądować
A z jakiej powierzchni planujesz starować - trawa, beton ?
-
Co Pana przekonało do PITLABA a nie do np: KFC32FTB które moim zdaniem jest o wiele lepsze.
Starałem się wytłumaczyć to w p. #19. Ale nie ma przymusu, każdy lata na czym uważa
-
 1
1
-
-
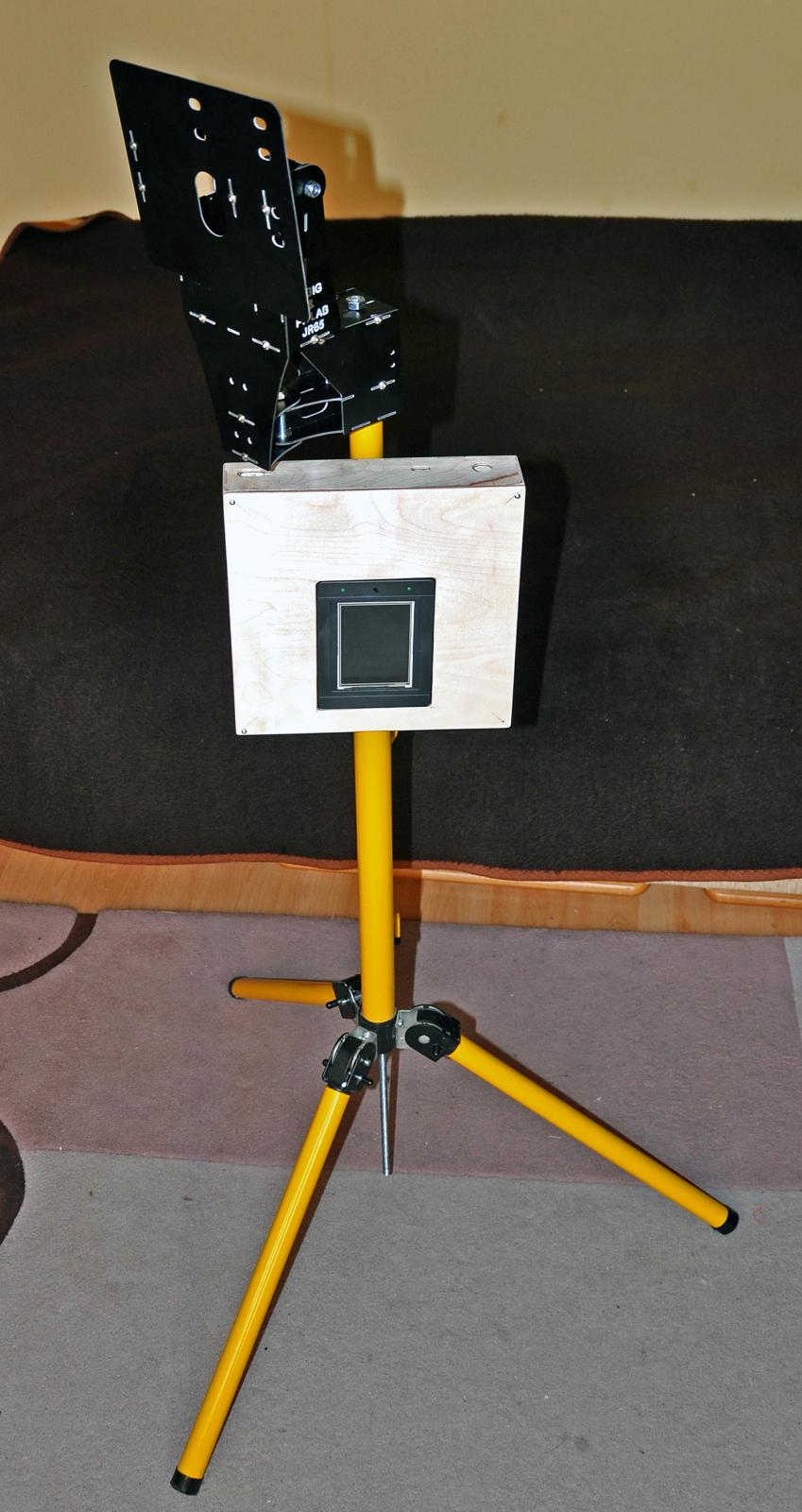
Stacja naziemna gotowa do prób:
-
osobny model w nadajniku jest bardzo dobrym rozwiązaniem nie tylko z tego powodu. Zawsze są nieznaczne przesunięcia w trymach, jak byś nie starał sie precyzyjnie zrobić kopii. Do tego model akro de facto moze wymagać troche innych ustawię niż model rekreacyjny. Chociażby wielkości wychyleń czy rocznicowości. Lub dodatkowe miksy. Tak przynajmniej nic sie nie pokiełbasi
Oczywiście pod warunkiem, że przed lotem nie zapomnimy przestawić nadajnika na odpowiednią wersję modelu
-
Bo przetrymowałeś SW
Tak, więcej założyłem osobne modele Popylacz i Popylacz Akro. Myślę, że moje trymowanie bardziej wynika z błędu wykonawczego skrzydeł (lotki) natomiast SW ma niewielką zmianę.
A o to film z sobotnich lotów Popylaczem Akro. Dzień był spokojniejszy więc mogłem "dopieścić" regulację modelu.
Co mogę stwierdzić - Popylacz ma duży potencjał do którego ja powoli dorastam, poznając coraz bardziej model po każdej wyprawie na lotnisko
. Zapraszam na film:
-
Z moich kombinacji wynika, że po założeniu lżejszych/cięższych skrzydeł do modelu (lub tych samych po poważniejszej naprawie), zmienia sie ŚĆ (czasami dość znacząco) i model wymaga albo zmiany położenia wyposażenia, dodania/ujęcia balastu lub przetrymowania.
Wiec opcja z drugim programem jest jak najbardziej OK.
Ja nie musiałem zmieniać wyważenia (rozmieszenia pakietów w modelu) - jest ono takie same na obu typów skrzydeł. Jest to bardzo wygodne zmiana skrzydeł i w powietrze.
Co nie znaczy, że nie masz racji.
-
Gregory z Popylaczem na lotnisku
-
Mobius jako kamera do podglądu to nie najlepsze rozwiązanie. Przekonasz się o tym przy pierwszym nawrocie pod słońce.
Przy tej mocy nadajnika 3 km są realne, ale przy dobrej antenie kierunkowej i trackerze po stronie odbiorczej. Oczywiście antena nadawcza też musi być sprawdzona (z tymi od kompletu bardzo różnie bywa).
Ranger dostał nową kamerę płytkową Sony FPV.
Powoli buduje się stanowisko stacji naziemnej z trakerem (układ śledzenia anteną modelu). Sercem stacji jest moduł PITLAB GS
-
No tu dużo lepiej
Ja w poniedziałek latałem podczas deszczu i huraganu (nie wiem tylko jak się nazywał) na mazurach oczywiście moim modelem żółtym własnego projektu i udało mi się nawet zrzucić dwóch spadochroniarzy ochotników.
Nie patrzę przy takich modelach na warunki atmosferyczne, albo latają albo nie.
Bałem się tylko o aparaturę aby deszcz jej nie uszkodził. Jeden z trymerów się przez to zawiesza chyba
Na Mazurach jak pamiętam, nazywa się to "Biały Szkwał"
No to miałeś przeżycia, a jakiś film powstał ?
-
Te drgania kamery z samolotu, takie uskoki na bok skąd one się biorą?
To chyba nie wina wiatru, mocowania kamery?
Jakość nagrania ostrość - ok samolocik ładnie lata ale te drgania... na takim sprzęcie to powinno płynąć
Pisałem jakie były warunki oblotu. 5-6 m/s przy ziemi, wiatr zmienny co do siły i kierunku a model lekki. Nie miałem, więc możliwości nawet spróbować poustawiać parametrów autopilota. Nawet nie wiem czy model lata symetrycznie. Potrzebuję jeden spokojny bezwietrzny dzień, żeby to spokojnie wyregulować. A swoją droga szkoda, że nie zrobiłem ujęcia bez stabilizacji byłoby jeszcze ciekawsze bujanie. Jeżeli są turbulencje w powietrzu to żaden stabilizator ich nie zlikwiduje, co najwyżej wygładzi. Szarpnięcia obrazu - to możne to być też i za duża czułość stabilizacji - ale to muszę sprawdzić w bardziej spokojny dzień.
To jest film historyczny - czyli tak jak było. Mogłem poczekać, aż opanuję w 100% technikę, na ładny słoneczny dzień i wtedy byłoby super. Ale wtedy byłoby niezgodne z prawdą. To jest dopiero początek - ważny będzie efekt na końcu, będzie wtedy z czym porównać.
Ważne, że Ranger EX radzi sobie w trudnych warunkach i to był główny cel tego ćwiczenia. Może niezbyt wtedy ładnie lata, ale lata bezpiecznie.
Poniżej zamieszam film z lotów mojej Prząśniczki J1M w ładnej prawie bezwietrznej pogodzie z włączoną stabilizacją - i tu model jak to napisałeś płynie. Podobnie będzie i z Rangerem tylko trochę cierpliwości
. -
Film z oblotu modelu Ranger EX. Mimo porywistego wiatru co widać na ujęciach z powietrza obraz z kamery pokładowej jest ostry więc jej amortyzacja zdaje egzamin.
Patrz też warunki oblotu p. #52 i p.#53
A tu film zapraszam:
-
Popylacz ze skrzydłami Akro po oblocie:
-
Pisałem, że nie lubię wystawiać antenek odbiornika RC na zewnątrz modelu. Ciągle się do nich dotykam przy przenoszeniu modelu. Nalepiłem nawet sobie takie oznaczenia widoczne z boku, ale czy to pomoże zobaczymy - nawyk jest silny
-
Gratulacje oblotu i miłego latania życzę
może też się kiedyś dorobię takiego sprzętu ;PDziękuję
Autopilot Pitlab może służyć do paru modeli, więc jest to inwestycja uniwersalna, co do modelu jak pisałem można kupić KIT i stopniowo go wyposażać, choć zestaw w sumie chyba wychodzi taniej.
Ja często, aby realizować swoje pasje podejmowałem doraźnie dodatkowe prace i tak po mału się zbierało.
Życzę Ci abyś jak najszybciej i Ty osiągnął swój cel.
Pioterek
-
Podsumowanie:
Myślę, że dość dokładnie opisałem model Ranger EX i jego przygotowanie do lotów FPV. Było trochę zmian i poprawek a dzisiaj odbyło się sprawdzenie tego wszystkiego.
Dzisiaj w warunkach "bojowych" model został sprawdzony na lotnisku trawiastym. Piszę o rodzaju nawierzchni lotniska bo jest to w tym modelu istotne - Ranger ciężko startuje z takiego lotniska i lubi "dziubnąć nosem" - dzieje się tak z powodu wysoko umieszczonego silnika i sporego oporu kół w wysokiej trawie. Dlatego start wymaga zaciągniętego SW i stopniowego dodawania gazu. W dodatku jeżeli startujemy nie dokładnie pod wiatr musimy, aby utrzymać kurs operować jeszcze dodatkowo SK.
Myślę że w przypadku nawierzchni gładkiej start powinien być bezproblemowy. Na start ma też wpływ prawidłowe wyważenie, które wg. mnie producent podaje zbytnio na przód. Cofnąłem dzisiaj swoje pakiety o ok. 4 cm ku tyłowi modelu, poprawił od razu się start (skrócił) i można było zdjąć trymowanie z SW.
W locie model sprawuje się poprawnie i bezpiecznie chociaż ze względu na dzisiejszy silny wiatr lot mógłby być ładniejszy. Wprowadziłem silny mikser lotki-SK co poprawiło elegancję zakrętów. Nie było problemów na kontrreakcję modelu na silne podmuchy wiatru ani lot pod wiatr.
W trybie stabilizacji widać było wyraźnie, że model się uspokaja i można było puścić drążki w aparaturze a model kontynuował dalej stabilny lot. Wytrącenie modelu z równowagi i puszczenie drążków radia poziomowało model w szybkim czasie.
Lądowanie na klapach - zmodyfikowane prze zemnie klapy okazały się bardzo skuteczne. Model od razu tracił szybkość i wysokość. W ostatniej fazie lądowania dobrze jest dla elegancji lądowania operować małym gazem. Lądowanie na paru metrach. Musiałem wprowadzić niewielki mix klapy - SW ponieważ model po włączeniu klap lekko zadzierał do góry. Lądowania w przeciwieństwie do startów są dużo łatwiejsze.
Po zdjęciu gazu model ładnie szybuje, choć do doskonałości szybowca oczywiście mu daleko, ale przy dobrej termice ......
Ponieważ pakiet FPV wyczerpuje się powoli, można go zmniejszyć do np. 3S 1500mAh dodając w to miejsce większy pakiet napędowy np. 4S 5300 mAh.
Myślę, że w bardziej pogodny dzień Ranger pokaże co potrafi, dając radość z miarę długiego i ładnego lotu
Teraz przede mną okres dopieszczania parametrów autopilota, stopniowa poprawa toru radiowego FPV a potem loty autonomiczne. Ale to już zajmie następne tygodnie.
-
Wiesz, wszystko tak jak zwykle inaczej - miał być wiatr 2m/s a było 5 do 6m/s przy ziemi, a wyżej ? . Trawa na lotnisku świeżutka wyrosła do połowy koła, zamiast zapowiadanego słońca przez chmury była mgła na 500 m do 600 m widoczności z jakimś samolotem kręcącym się w powietrzu, co go raz widać a za chwilę nie. Wiatr oczywiście w poprzek lotniska, wyważenie podane w dokumentacji modelu oczywiście błędne - za mocno na przód, ale tak po zatem to już tylko sama bajka
. Wprowadziłem punkt Home, porobiłem parę zdjęć i w górę. Model leniwie wystartował trochę regulacji w powietrzu, próba klap i pierwsze lądowanie. Korekta trymerów do pamięci autopilota i lot na autopilocie - wyraźnie spokojniejszy. Parę lądowań i jedna pozytywna próba automatycznego powrotu z trasy do punku Home.
Co mogłem dzisiaj zrobić - wiatr w górze szalał, więc dokładnej regulacji prawie żadnej, ale sprawdziłem wszystko co można było w boju, ale tylko w zasięgu wzroku. Na "Popylaczu" (6,4 kg) takie warunki nie robiły by wrażenia, ale Ranger jest leciutki (2,4kg), więc słodko mu w górze nie było - widać było jak pracują mu skrzydła. Jeden lot w takich warunkach to 15 minut na 1 pakiecie. Pakietów napędowych zużyłem trzy. Monitor stał włączony obok mnie i sobie gadał wyżej/niżej i ostrzegał przy zbyt niskim poziomem napięcia pakietu. Myślę, że jak na styropianowy modelik to Ranger sobie dość dzielnie dzisiaj poczynał. I na pierwszy raz chyba tyle.
Może jakiś film zmontuje bo pracowały dwie kamery Mobius, ale widoki mało ciekawe w takiej mgle i bez słońca.
-
Kiedy planowany oblot ?
A dzisiaj odbył się oblot. Ja i model żyjemy i pozdrawiamy
-
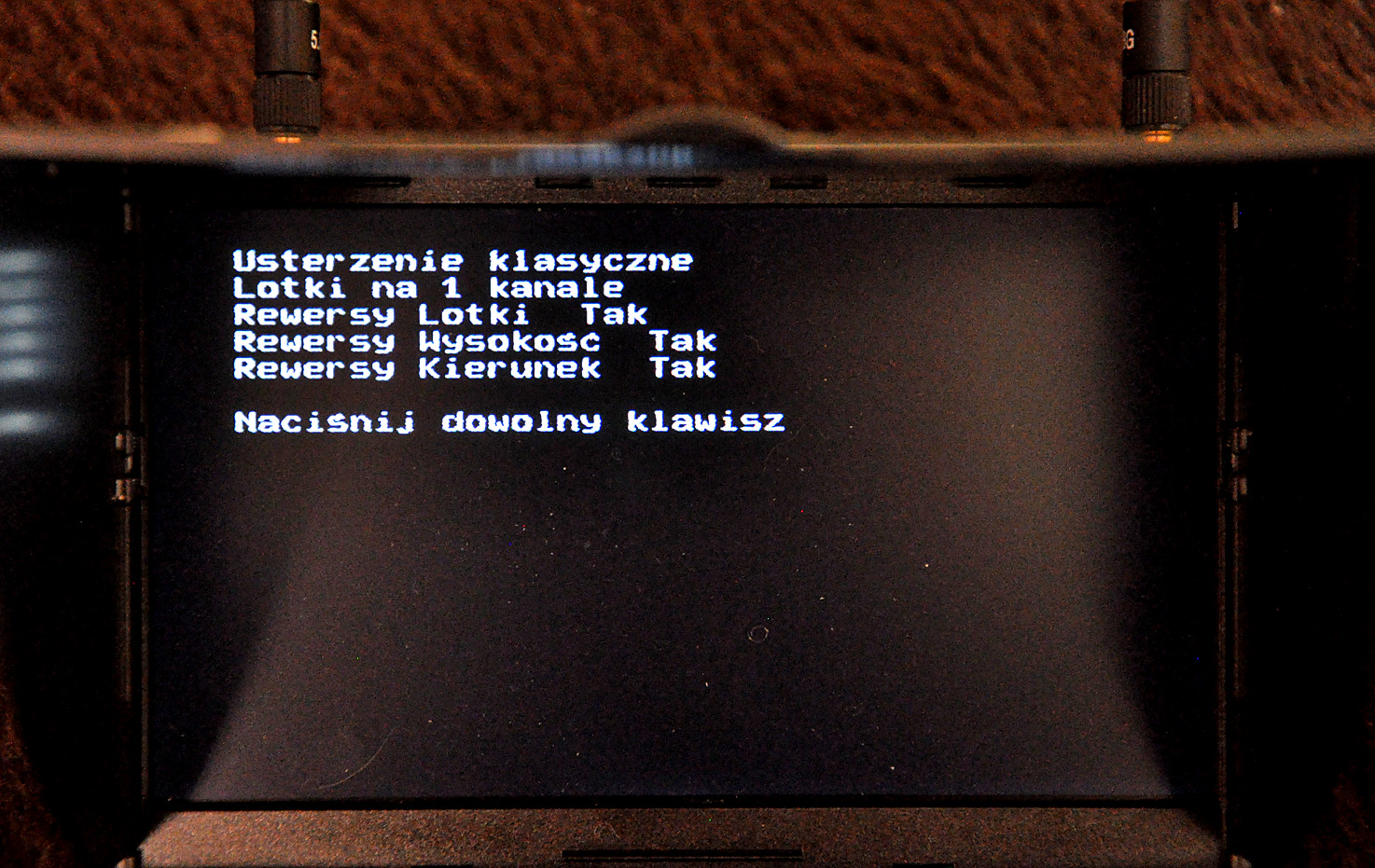
Model konfigurujemy w swojej aparaturze tak jak było by to bez układu Autopilota. Następnie trzeba sprawdzić rewersy lotek i SW w trybie STAB. Właczamy ten tryb i sprawdzamy reakcje modelu na jego przechylenia. Powierzchnie sterowe powinny pracować tak, aby kontrować te przechyły - np. jeżeli model w dół to SW wychyla się do gór itd.Jeżeli występuje niezgodność (brak kontrowania) i w menu OSD wybieramy Autopilot-miksery i tam mamy możliwość zmiany kierunku reakcji sterów na wychylenia modelu.
Ponieważ SK nie jest stabilizowany (ale może współpracować z lotkami) jego kierunek wychylenia też jest ważny. Postępujemy tu inaczej - wychylamy w aparaturze drążek SK np. w prawo i SK ma się również wychylić w prawo, jeżeli tak nie jest, zmieniamy rewers na SK.
Pozostałe parametry z pozycji autopilot do oblotu przyjąłem tak jak zaproponował na początek Pitlab.
Ekran mikserów i rewersów:
dla zainteresowanych instrukcje Autopilota i modułu OSD
-
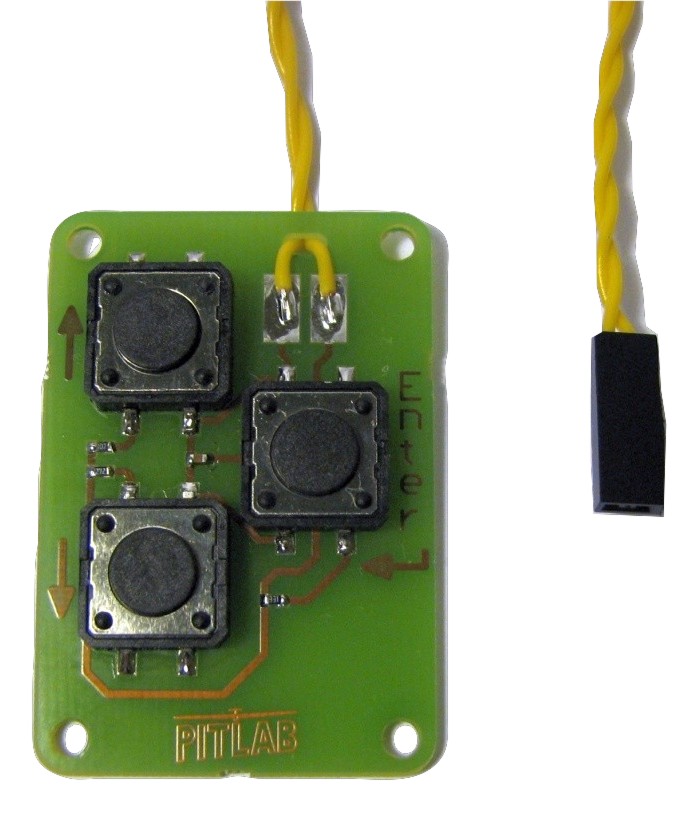
Klawiatura pokładowa do obsługi menu:
Klawiatura pokładowa składa się z trzech klawiszy podłączonych dwoma przewodami do gniazda modułu na płytce OSD. Poruszanie się po menu jest bardzo wygodne, dwa klawisze służą do wyboru pozycji trzeci do zatwierdzania wybranych wartości lub funkcji. Klawiaturę można zamocować na wewnętrznej stronie kadłuba, wówczas ułożenie ręki przy jej wykorzystywaniu jest naturalne i intuicyjne.










 może też się kiedyś dorobię takiego sprzętu ;P
może też się kiedyś dorobię takiego sprzętu ;P





TS-11 Iskra 1400mm balsa+video
w Skrzydełka, kaczki i "odrzutowce"
Opublikowano
To własnie miałem na myśli, zwracając uwagę na rodzaj lotniska.