






stan_m
-
Postów
880 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
19
Odpowiedzi opublikowane przez stan_m
-
-
OK. Andrzeju

-
 1
1
-
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Skoro mówimy o poborze prądu przez serwo to trzeba powiedzieć, że istnieją trzy rodzaje prądów: prąd biegu jałowego, prąd roboczy i tzw. prąd trzymania. Prąd biegu jałowego jest pobierany przez serwo wtedy, gdy mechanizm jest pod napięciem ale nie wykonuje żadnej pracy. Wynosi on około 5-20mA. Prąd roboczy występuje wtedy, gdy serwo przechodzi z jednej ustalonej pozycji do drugiej przy tzw. normalnym obciążeniu w locie. W zależności od wielkości serwomechanizmu (i obciążenia) wartość tego prądu może wynosić od 200mA do 1 A lub więcej. Prąd trzymania jest pobierany przez serwo będące w położeniu ustalonym (różnym od neutralnego)ale pod obciążeniem mechanicznym (ramię serwa jest „trzymane”). Wówczas silnik elektryczny serwa działa prawie jak w zwarciu i pobiera dużo prądu. Wartość tego prądu (zależy od wielkości serwa i jakości jego silnika)może wynosić Od 500mA do 2 Amperów a nawet więcej. Jest jeszcze tzw. prąd rozruchowy serwa. Gdy serwo stoi nieruchomo w pozycji neutralnej pobiera tylko prąd jałowy. Jednak za każdym razem, gdy podawany jest sygnał sterujący, silnik musi przejść z zerowej prędkości orotowej i przyspieszyć do pełnej prędkości. W momencie podania sygnału sterującego silnik nie obraca się, więc przez bardzo krótki czas silnik pobiera prąd trzymania, a następnie, gdy silnik zaczyna się obracać, ten poziom prądu spada do wartości prądu roboczego silnika.
W serwomechanizmach analogowych tranzystory zastosowane w obwodzie sterownika były (i są)normalnie tradycyjnymi tranzystorami bipolarnymi NPN i PNP. Gdy serwomechanizmy są ustawione w puncie neutralnym, w obwodzie wzmacniacza istnieje niewielki obszar (po obu stronach punktu neutralnego), gdzie serwa działają wg charakterystyki liniowej. Oznacza to, że jeśli trochę poruszymy drążkiem, serwo zareaguje powoli przy niższym poborze mocy. To powoduje mniejszy pobór prądu ale serwo porusza się wolno. Jeśli jednak wykonamy duży ruch drążka, serwo szybko przyspieszy do pełnej mocy i pełnej prędkości i przejdzie do nowego położenia
Nowe serwomechanizmy cyfrowe wykorzystują tranzystory typu FET w sterowniku silnika, które prawie nie mają liniowego obszaru wokół punktu neutralnego. Wysyłają również sygnały sterujące do silnika znacznie szybciej niż serwomechanizmy analogowe, więc reakcja jest znacznie szybsza. Jeśli poruszamy drążkiem w najmniejszym stopniu, serwo natychmiast reaguje z pełną mocą (pobiera prąd trzymania o dużej wartości).
Ze względu na niesamowicie szybką reakcję nowych serwomechanizmów cyfrowych oraz fakt, że za każdym razem, gdy poruszamy drążkiem, natychmiast osiągają pełną moc, pobierają OGROMNE ilości prądu za każdym razem, gdy się poruszają. Nowe cyfrowe serwomechanizmy zasadniczo pobierają pełny prąd trzymania serwomechanizmu za każdym razem, gdy wykonujemy jakikolwiek ruch drążkami. Ten fakt decyduje nieraz o bezpieczeństwie lotu (np. modele helikopterów, gdzie jednocześnie zawsze pracują co najmniej cztery serwomechanizmy). Dlatego tak istotny jest tzw. bilans mocy skutkujący właściwym doborem parametrów serw, BEC-a, akumulatora i przewodów elektrycznych. Najistotniejszym faktem jest znajomość prądu biegu jałowego, prądu roboczego i prądu trzymania serwomechanizmu. Niestety nawet renomowane firmy (Futaba, Graupner) nie ujawniają tych parametrów w katalogach. Trochę lepiej działa Hitec, np. dla serwa HS-6975HB podaje w Karcie Technicznej:
Prąd biegu jałowego - 3mA
Prąd roboczy - 200 mA przy 4,8 V, 240 mA przy 6,0 V (bez obciążenia)
Prąd trzymania - 2400 mA przy 4,8 V, 3000 mA przy 6,0 V
Reasumując: serwa analogowe trzeba stosować wówczas, gdy chcemy mieć małe pobory prądów ale co za tym idzie wolne działanie serwomechanizmów oraz mniejsze obciążenia mechaniczne. Serwa cyfrowe – wtedy, gdy potrzebne są szybkie i precyzyjne wychylenia sterów oraz duże obciążenia mechaniczne (a dysponujemy mocną i sprawną instalacją zasilania). Jednak w każdym przypadku potrzebny jest bilans mocy. Ja wykonałem małą hamownię do pomiaru parametrów i charakterystyk serw, która bardzo dobrze się do tego celu nadaje. W wariancie najprostszym wystarczy obwód z amperomierzem i woltomierzem, testerem serw oraz zasilaniem (4,8V oraz 6,0V) w celu wyznaczenia trzech wyżej opisanych prądów by dobrać właściwie serwa oraz ich zasilanie.
-
13
-
W takim modelu aż się prosi dać cyfrowe serwa.
Oczywiście, że 5A BEC wystarczy. Ten regulator to jeden z lepszych na rynku HK. Miałem i jeszcze gdzieś mam chyba z 5 szt. i ani razu mnie ten regulator nie zawiódł. Zawsze w moich modelach obsługiwał 6 serw cyfrowych.
Na zasilanie trzeba zwracać szczególną uwagę zawsze, bez znaczenia jakim modelem latasz. Zasilanie musi być dobrane adekwatnie do rozmiaru i ciężaru modelu.
Serwo cyfrowe Graupner DES 448BB MG (przykładowe serwo cyfrowe z podanym publicznie poborze prądu-wiarygodnym!!!)
Maks. pobór prądu przy 4,8 V ok. 825 mA
Maks. pobór prądu przy 6,0 V ok. 1050 mA
Dla zasilania 4,8V 6x825mA=4950mA
Dla zasilania 6,0V 6x1050mA=6300mA
-
1
-
-
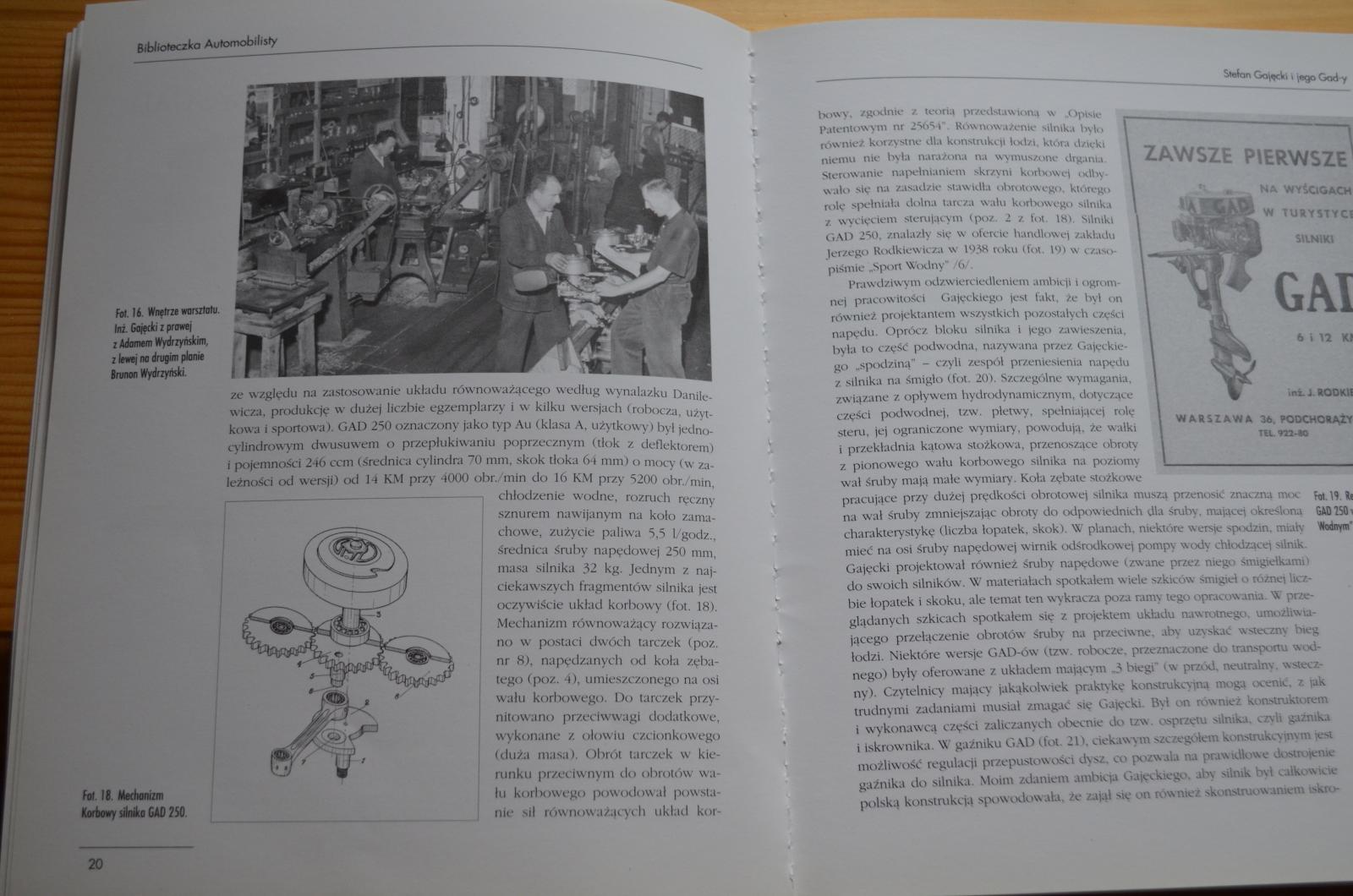
No. I to po prawej to JEST koło zamachowe. A to po lewej w jajeczku to tzw przeciwwaga, choć w tym przypadku określenie bardzo na wyrost, bo chyba konstruktor SiMa nie przewidywał wyważania tego wału, więc ja bym to nazwał częścią składową wału w której osadzony jest czop korbowy.
Ale widzę, że muszę być czujny, bo zdjęcie po prawej jest moje, a na tym forum go nie publikowałem.
Kolega Mariusz zadał sobie trud jak widzę i to zdjęcie odnalazł
No gdzieś tam jest jeszcze więcej ciekawych zdjęć
....A.C.
Przeciwwaga nie może nie być kołem zamachowym (w rozumieniu ścisłym) bowiem jest bryłą posiadającą masę oraz oś obrotu a co za tym idzie wytwarza moment bezwładności oraz jest "magazynem" energii kinetycznej.
Ciekawostką techniczną jest mechanizm równoważenia sił dynamicznych w układzie korbowym wynaleziony przez inż.Danilewicza. Rysunek i opis (książka "Stefan Gajęcki konstruktor silników GAD") pokazuje bardzo dobrze a jednocześnie dowodzi, że sama przeciwwaga wału korbowego jest niewystarczająca.
-
Być może przyczyną jest niewłaściwy tryb współpracy odbiornika z serwomechanizmami ustawiany z poziomu oprogramowania lub manualnie (niestety nie używam Graupnera więc nie wiem jak to się robi). Chodzi o to by ustawić Mode odbiornika albo w funkcji FS( serwa wolne - impuls 14ms) albo w funkcji HS (szybkie serwa cyfrowe - impuls 7ms). Ja miałem podobne problemy z Futabą i odbiornikiem FrSky. Gdy odbiornik ustawiony w funkcji FS rozpoznał serwo cyfrowe to się rozbindował i nie dał się uruchomić dopóki nie zmieniłem Mode.
-
Niewiarygodne, że w roku 2019 publicznie ktoś wygłasza takie opinie... Przetłumaczyłem i pokazałem ten komentarz kolegom niemieckim w pracy. Poczerwienieli ze wstydu z powodu wpływu Niemiec (jako państwa) na Polaków (jako swoich nowych obywateli) tam pracujących. Kolega Piotr pewnie teraz nazywa się Peter Schrecklich von Panzerfaust co oznacza, że fajki z nim palić nie należy. Bo wybuchnie.
-
Koledzy Modelarze!
Przecież runda czterozakrętowa przed lądowaniem to jest figura akrobacyjna oceniana na zawodach akrobatów i makiet! Naprawdę pilotom 25 kilogramowców trzeba to wyjasniać? Ja tego się nauczyłem latając w F3A Club
http://komarkus0.prv.pl/f3a-klub.htm
Post Scriptum: I ja przepraszam niektórych dyskutantów za ten komentarz bowiem to forum zniechęca wybitnie do zabierania głosu na tematy techniczne a publiczne drwiny niektórych powyżej z wiedzy inżynierskiej Andrzeja , którą tutaj bezpłatnie można posiąść są zwykła arogancją oraz ignorancją. Podobnie jak Andrzej wolę fora angielskojęzyczne, gdzie atmosfera jest zasadniczo inna.
-
-
w drugiej połowie lat 60-tych dostałem od Waldemara Marszałka wiekszą ilośc paliwa alkoholowego którego uzywał w swoim Koenigu...
paliwa tego uzywałem jeszcze w latach 70-tych bez żadnych zmian jakościowych...więc ki czort ??
...gdyż było to paliwo na bazie metanolu. Ja opisałem wpływ etanolu, który jest składnikiem benzyny dostępnej na stacjach benzynowych.
Jeśli wierzyć w to co piszesz to wielkim nieporozumieniem jest stosowanie wydechu rezonansowego, gdyż spaliny są zawracane do wnętrza silnika...
Podawanie ciśnienia z tłumika wprost do zbiornika paliwa też pewnie szkodzi silnikowi bo jeśli w spalinach lwią część stanowi para wodna z którą tak chętnie łączą się alkohole wchodzące w skład paliwa to po prostu każdy silnik po krótkim czasie by się skończył, a jednak tak się nie dzieje...dlaczego?
Pierwsze słyszę, żeby panewki, membrany czy skrzynie korbowe (wykonane zazwyczaj z matali kolorowych) były wrażliwe na wilgoć, łożyska być może - ale z pewnością nie wszystkie...i nie zawsze.
Parę razy zdarzyło mi się nawet latać w deszczu i bez jakichś szczególnych zabiegów stwierdziłem, że silnikowi to wcale nie zaszkodziło...a nawet miał odczuwalnie lepszą charakterystykę pracy...
Pawle, nie chciałbym tutaj robić wykładu i ciągnąć niemiłosiernie długo ten wątek. O tym, że woda (para wodna) jest szkodliwa dla silnika spalinowego pisano już wielokrotnie. Kolega Andrzej z Wrocławia, znający się b.dobrze na motorkach wielokrotnie opisywał sposoby konserwacji silników po pracy a także pokazywał co może zrobić z elementami silnika woda, nie usunięta na czas z jego wnętrza.
Dodam jeszcze, że dyskutujemy o lotniczych modelarskich silnikach benzynowych, gdzie układy rezonansowe nie występują często, ciśnienia do zbiornika się nie podaje (jest gaźnik membranowy) a elementów stalowych wrażliwych na wilgoć wewnątrz silnika trochę jest.
Edit: Co do panewek i wody:"Smarowanie elementów obracających się wymaga zgodnej lepkości oleju. Elementy obracające się są chronione ponieważ lepkość oleju wzrasta wraz z ciśnieniem. Pojawienie się wody sprawia, że własność ta znacząco się pogarsza. Może to uniemożliwić utrzymanie nieprzerwanego filmu olejowego, skutkując bezpośrednim kontaktem pomiędzy powierzchniami wału i panewki, a w efekcie zmęczeniem kontaktowym.Ocenia się, że w zależności od ilości wody obecnej w oleju, żywotność panewek skraca się od kilku do kilkuset razy!"https://www.akademia-automatyki.pl/blog/2015/06/09/woda-w-oleju-zagrozenie-dla-twoich-maszyn/
-
Tiaa.
Doprawdy fascynująca teoria.
1)A czy zadałeś sobie kiedykolwiek pytanie co jest jednym z dwu głównych produktów reakcji spalania mieszanki paliwowej w silniczku i czy nie jest to przypadkiem właśnie woda?
2)No i jeszcze jedno czy przed zmieszaniem z olejem tez zły etanol zmieszany z benzyną wody nie wchłania?
No chyba że po zmieszaniu paliwa zostawiasz otwartą butelkę bo śmierdzi i żeby się przewietrzyło...
Do.p.1. Jeżeli produktem spalania mieszanki paliwowej jest woda to jest ona usuwana bezpośrednio z komory spalania spalania silnika 2T na zewnątrz i nie psuje łożysk, panewek, membran i skrzyni korbowej. Zaś woda w paliwie rozpylonym działa na prawie wszystkie części silnika.
Do.p.2. Oczywiście, że etanol przed zmieszaniem z olejem wchłania wodę ale o wiele większą szkodę czyni, gdy długotrwale jest rozpuszczony w oleju (rozpuszcza substancje smarne co prowadzi do utraty własciwosci oleju)
Benzyny mają określony tzw. okres indukcyjny, który mówi o dopuszczalnym okresie przechowywania samej benzyny (nie mieszanki) tak więc i z tej strony też jest ograniczenie ale na szczęście dla modelarzy - pomijalne!
-
Skoro już mowa o odpowiednim smarowaniu i oleju to mam pytanie-jaki jest maksymalny okres przydatności mieszanki benzyna-olej?
Ja mieszam benzynę z olejem bezpośrednio przed wyjazdem na lotnisko i tylko w takiej ilości jakie jest dzienne zapotrzebowanie bowiem:
- benzyna ze stacji zawiera etanol (max 5% wg PN), który powoduje rozkład smarujących składników oleju
- etanol jest higroskopijny czyli wchłania wodę co zdecydowanie wpływa na korozję części silnika
-
OK. Pytanie zatem brzmi: Czy na statecznik poziomy ZAWSZE działa siła nośna skierowana w dół?
Odpowiedź:
Każde usterzenie poziome (mające cechy skrzydła nośnego) można zakwalifikować do:
a) usterzenia tylko ustateczniającego wytwarzającego minimalną ( pomijalną) siłę nośną
b)usterzenia ustateczniającego oraz wykorzystywanego jako dodatkowa powierzchnia nośna
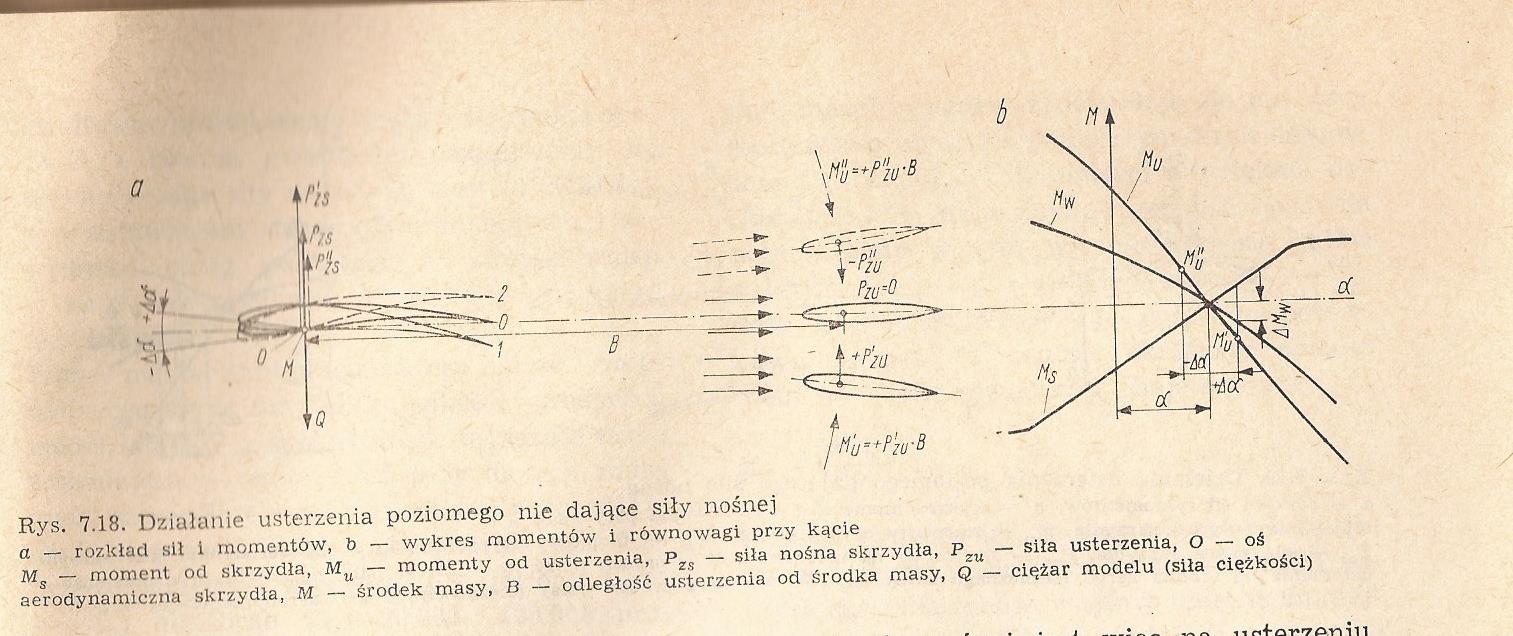
W przypadku usterzenia tylko ustateczniającego siłę równoważącą ciężar modelu wytwarza jedynie skrzydło zaś usterzenie nie wytwarza w normalnym ustalonym locie poziomym żadnej siły nośnej. W takim usterzeniu występuje przeważnie profil symetryczny taki, aby przy optymalnym kącie natarcia skrzydeł i po uwzględnieniu kąta odchylenia strugi nie dawał on żadnej (istotnej) siły nośnej pionowej. Powinien on być opływany pod kątem natarcia równym zero w stosunku do miejscowego kierunku strug powietrza za płatem nośnym dając najmniejszy możliwy opór. (położenie środkowe 0, Pzu (siła usterzenia)=0) - rys 7.18. Przy podmuchu ku górze (zwiększenie kąta natarcia, położenie 1) rośnie również siła nośna powiększająca jednocześnie kąt odchylenia strug za skrzydłem ku dołowi. Ostatecznie jednak usterzenie jest opływane strumieniem pod dodatnim kątem natarcia co daje P’zu+(siła usterzenia) skierowaną do góry (wartość niewielka).
Gdy kierunek podmuchu jest ku dołowi (zmniejszenie kąta natarcia, położenie 2) to następuje zmniejszenie siły nośnej i jednoczesne odchylenie strug za skrzydłem. Usterzenie jest opływane pod ujemnym kątem natarcia i wytwarza ujemną siłe nośną -P’’zu. Rysunek 7.18 pokazuje jeszcze wykres momentów z funkcji kata natarcia i wskazuje kąt natarcia przy którym występuje równowaga.
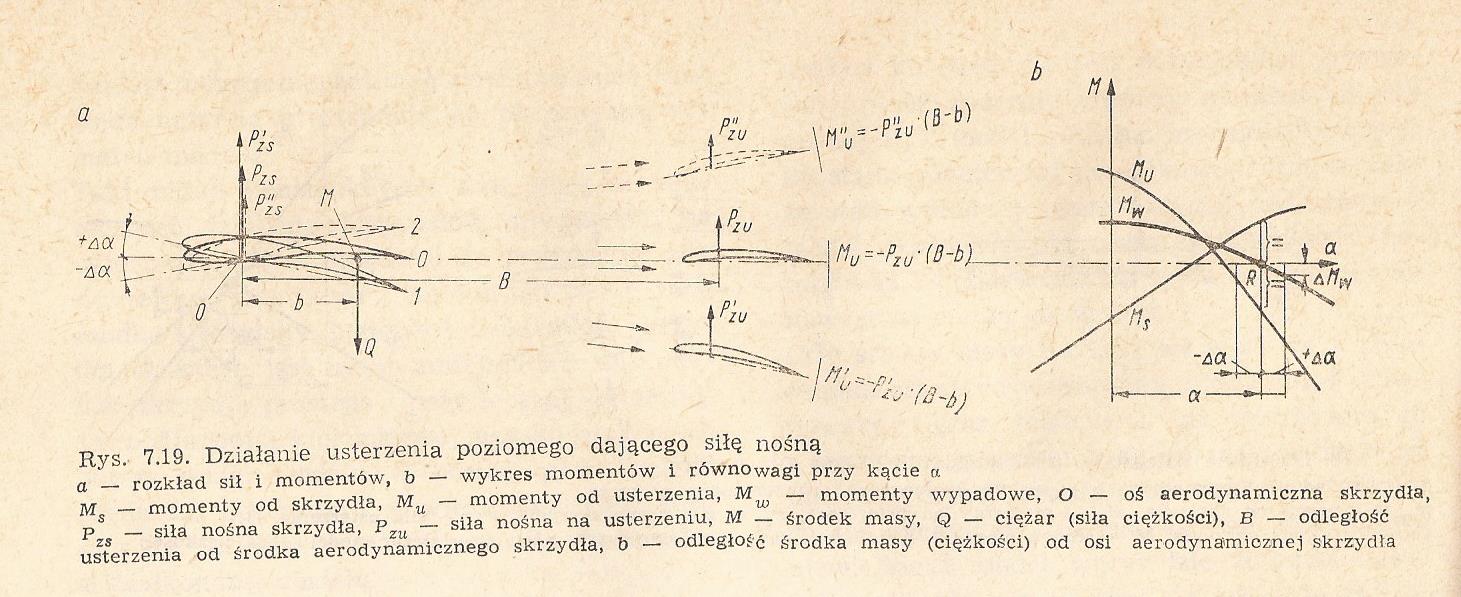
W przypadku usterzenia ustateczniającego oraz wykorzystywanego jako dodatkowa powierzchnia nośna, siła nośna Pzu (rys.7.19) istnieje również w locie ustalonym przy kącie natarcia dobranym dla uzyskania optymalnych osiągów. Jednak w każdym z wcześniej opisanych przypadków (położenia 0,1,2) są to wartości siły nośnej skierowane do góry!!! Wykres momentu wypadkowego dla tego rodzaju usterzenia pokazuje , że jego przyrosty po wychyleniu modelu o pewien kąt są mniejsze a więc i powrót do położenia równowagi jest bardziej powolny.
Siła nośna statecznika poziomego nie zawsze jest skierowana do dołu a jej zwrot zależy głownie od profilu statecznika, jego kąta zaklinowania(konstrukcyjne odtworzenie kata natarcia) czyli od charakteru pracy aerodynamicznej usterzenia. Jeżeli usterzenie jest tylko ustateczniające czyli wytwarzające minimalną ( pomijalną) siłę nośną to możliwy jest przypadek zwrotu wektora siły nośnej do dołu, gdy natomiast usterzenie jest ustateczniające oraz wykorzystywane jako dodatkowa powierzchnia nośna to zwrot wektora siły nośnej jest zawsze skierowany do góry. (Na podstawie J. Staszek, Mechanika Lotu Modeli Latających)
-
I znów jeden szczególny przypadek, który ma potwierdzić regułę "zawsze na stateczniku poziomym w układzie klasycznym działa siła nośna w dół". Czy dobrze zrozumiałem?
Raczej: moment wypadkowej siły aerodynamicznej obraca ogon samolotu w dół. Co do samej siły nośnej statecznika poziomego to trzeba by było obejrzeć biegunową konkretnego statecznika albo przeczytać w Karcie Niwelacji jakie są kąty zaklinowania statecznika poziomego. Co ciekawe, z punktu widzenia automatycznego sterowania w kanale pochylenia lepiej zawsze jest, gdy wypadkowa siła nośna działa w dół. Znamienne jest też, że w dawnych modelach latających swobodnie (F1A, F1B...) stateczniki poziome zaklinowane były na kątach ujemnych a tzw. determalizator doskonale pokazywał jak wpływa duża siła nośna skierowana w dół.
-
(...)
1)Jak się urwie ogon to drastycznemu zaburzeniu ulega środek ciężkości, także to jest argument chybiony, o ile w ogóle jest prawdziwy - ogony raczej nie znikają ot tak sobie w poziomym locie, więc trudno powiedzieć w którą stronę skieruje się wtedy model.
Oczywiście modele z urwanym ogonem *generalnie* kierują się w dół i prędzej czy później kończą w ziemi - tu zgoda, tylko to w żaden sposób nie świadczy o zwrocie siły nośnej statecznika.
EDIT: tutaj przykład - bezpośrednio po utracie połowy statecznika poziomego nos modelu idzie w górę:
https://youtu.be/njRUumbluyI?t=120
Jest to o tyle dobry przykład, że statecznik się zwinął a nie oderwał, więc ŚC nie uległ przemieszczeniu, lot był zbliżony do poziomego w momencie awarii, i nie widać żeby pilot wykonywał jakieś gwałtowne ruchy drugą połówką steru wysokości (chociaż jakość filmu jest słaba więc trudno powiedzieć).
2)Wyobrażenie jakoby płat ciągnął samolot w górę a statecznik w dół i że tak się równoważą - jak na wadze szalkowej - siły działające na samolot jest mylne.
Samolot musi zachować równowagę dynamiczną, a to wiąże się ze stosunkiem zmian siły nośnej na stateczniku i płącie w funkcji kąta natarcia.
Niezależnie czy układ jest klasyczny, kaczka, czy tandem, powierzchnia aerodynamiczna która jest bardziej z tyłu musi mieć tę zmianę szybszą niż powierchnia będąca z przodu.(...)
1. Cytowany film pokazuje nie "zwinięcie się" statecznika poziomego lecz całkowite jego oderwanie (pozostała połówka steru na łączniku) wiec gdyby Kolega miał rację co do tego, że to gwałtowne przesunięcie SC na skutek utraty masy statecznika powoduje zmianę toru lotu to model nurkowałby aż do samej ziemi. Tymczasem model zadarł do góry bowiem gwałtownie wzrosła siła oporu statecznika na skutek merdającej połówki steru, czyli zgodnie z prawem równoważenia momentów sił w kanale pochylenia!!! Przykład jest niestety bardzo nieodpowiedni do przeprowadzanego dowodu!
2. Niestety Isaac Newton nie mylił się co do równowagi sił i równości momentów w każdym układzie mechanicznym będącym w równowadze lub poruszającym się ruchem jednostajnym prostoliniowym (idealny lot samolotu). Toteż z tego powodu płaszczyzny nośne samolotu służące do zachowania w/w równowagi nazwano statecznikiem lub stabilizatorem. Statecznik wytwarza WYPADKOWĄ siłę aerodynamiczna skierowaną albo w górę albo w dół stosownie do warunków lotu . Jej wyłącznym zadaniem jest wytworzenie takiej wartości momentu pochylającego aby zachowując zapas stateczności doprowadzić kadłub samolotu po zaistnieniu zakłócenia do położenia równowagi. Ta WYPADKOWA siła aerodynamiczna jest wektorową sumą sił: w funkcji kąta zaklinowania, w funkcji wychylenia steru wysokości, w funkcji wychylenia trymera a nawet siły aerodynamicznej pochodzącej od kierunku wiatru, np. wiejącego z tyłu). Gdy zabraknie statecznika (stabilizatora) samolot o układzie klasycznym wykona niekontrolowane nurkowanie a nawet pętlę zewnętrzną zakończoną oczywiście rozbiciem się...Nie z powodu utraty masy stabilizatora lecz z powodu utraty równowagi momentów sił aerodynamicznych!!!
-
Jakiś czas temu chwilkę poświęciliśmy tutaj hamowni silników modelarskich więc dzielę się takim filmem (co prawda dotyczy silników do modeli pływających i wykorzystuje hamulec hydrodynamiczny ale idea jest dobra i skuteczna):https://www.youtube.com/watch?v=bP472k1EwCA
-
A jednak to Karol Gustaw najechał był Polskę bo w Szwecji zabrakło owsa dla koni...
Wspomniany zwitek koron a także przelewy do Polski ciężko pracujących rodaków potrafiły doprawdy dokonać zmian zasadniczych co jakoś w swojej pracy słyszę niemal codziennie od cudzoziemców pamiętających Polskę 5, 10, 15 lat temu...Oczywiście jest jeszcze wiele do zrobienia ale jesteśmy już na dobrej i właściwej drodze. A to wiele. Ostatnio, gdy zepsuł się samochód służbowy miałem okazję podróżować warszawskim metrem z rodowitym Niemcem, który powiedział: "Biali ludzie..., czysto i piękne dziewczyny. Też tak bym chciał u nas." Miałem uśmiech jak na opakowaniu do budyniu w czasach PRL. No i jeszcze ten filmik, jakby z przeciwnej strony Europy.https://www.youtube.com/watch?v=3wu4xRV47ZQ
-
A tak w Wyrzysku koło Piły śpiewa chór amatorski :https://www.youtube.com/watch?v=mNPKBmQ-1go
-
Coś mi się wydaje, że Kolega Jarek jak wyjechał to nie odwiedza Polski!
Gdyby jednak odwiedzał to zapraszam w Podlaskie na sery korycińskie (certyfikat unijny, zajada się nimi Książę Karol i chłopaki z Polski na budowach w East London ) i na kindziuka, przy którym włoskie "proszuto" przypala się ze wstydu... Naprawdę wiele się zmieniło. Andrzej ma rację, wysyp browarów lokalnych jest nie do opisania. Mój kolega wygrał konkurs piwowarski i w nagrodę oprócz kaski otrzymał produkcję 1000l swojego piwa w jednym z największych browarów świata wraz ze sprzedażą w jego sieci. A i cudzoziemców w Polsce przybywa, chociażby pracowników wielkich koncernów światowych, którzy chętnie pracują w Polsce na kontraktach i chwalą sobie dobre polskie jedzenie (znam takich nie mało). Jednym słowem podążamy na z góry upatrzone pozycje!
-
Wiele mi wyjaśniły wasze wpisy z tym, że gdzie szukać HS lub FS ?
Dla odbiornika FR Sky TFR6 będzie tak:
Po zbindowaniu:
1.Wyłączyć zasilanie nadajnika.
2.Włączyć zasilanie odbiornika (powinno być ciągle włączone).
3.Nacisnąć przycisk F/S na 6 sekund:
- gdy czerwona LED zacznie migać szybko to jest Mode HS
- gdy czerwona LED zacznie migać wolno to jest Mode FS
4.Puścić przycisk w chwili odpowiedniego wyboru.
Uwaga: Mode HS jest przeznaczone dla "high-speed digital servos", pozostałe serwa wymagają Mode FS.
-
1
-
-
Najlepiej stosować się do rozdziału "Compatibility" w Instrukcji obsługi, gdzie są imiennie wymienione symbole nadajników i systemy sterowania dla których odbiorniki FR Sky są dedykowane.
Objawy opisane przez Romana pasują do niewłaściwego wybrania Mode HS lub Mode FS w zależności od obsługiwanych serwomechanizmów. I tak przypomnę, że dla serwomechanizmów o czasie impulsu 14ms należy wybrać Mode FS zaś dla mechanizmów o czasie impulsu 7ms należy wybrać Mode HS.
-
1
-
-
(...)
ponieważ nie ma hamowni z nawiewem powietrza z prędkością ponad 200 km/ godzinę (17.1 sekundy na 1 km.) to trudno cokolwiek powiedzieć o osiągach tych moich silników. Specyfika tej kategorii polega na jak najszybszym pokonaniu 100 okrążeń każde po 100 metrów z dwukrotnym obowiązkowym międzylądowaniem. Przy ograniczeniu pojemności silnika do 2,5 cm3 ograniczeniu pojemności zbiornika do 7 cm3 i na przykład w tym roku wprowadzeniu kolejnego ograniczenia jeśli chodzi o hałas czyli rodzaj tłumika z wielkością otworu 7 na 13 mm.
(...)
Nawiew o wspomnianej prędkości strugi absolutnie nie zapewni prawidłowej symulacji lotu modelu samolotu po okręgu, gdzie ZASADNICZĄ rolę odgrywają prędkości kątowe a co za tym idzie zniekształcenia i odchylenia strugi dotyczące nie tylko śmigła ale również parametrów pracy silnika (przy prędkościach 200km/h naprawdę trudne do zamodelowania). Dobrą teorię na ten temat zapodał J. Staszek w książce pt. "Mechanika lotu modeli latających".
A tak na spokojnie... Pochwalę się pomnikiem, który mam na biurku: Polska Jaskółka i Polska łopatka z polskiego silnika SO-3W (TS-11, I-22) podstawka - Polski Dąb a jakże.
Kołpaczek od Jaskólki został mi podarowany przez Wielce Szanownego Kolegę Pawła.
-
Dzięki Ci Stasiu, chyba mogę tak pisać nie obrazisz się mam nadzieję. Rozwiałeś moje wątpliwości, nie mogłem trafić na takie zdjęcia, gdzie wyraźnie widać poszycie lotki, teraz już wiem i mam co robić
Ależ oczywiście, że nie ma mowy o obrażaniu się
. Przeciwnie - jest mi bardzo miło! Ja szczególnie uważnie obserwuję ten etap Twojej pracy bowiem zamierzam wykorzystać Twoją technologię pokrywania konstrukcji szkieletowej. -
(...)
Zastanawiam się jeszcze nad jednym, czy na lotkach też są przeszycia i ząbkowane paski, będące przedłużeniem od profili skrzydeł? Jakoś na zdjęciach nie widać tych szczegółów, dlatego pytanie do kolegów, którzy mieli okazję oglądać Pipera na żywo.
Pozdrawiam - Darek
Tak. Zdecydowanie tak.http://jeffsplanes.com/Cub/completed/Completed.html
-
(...)
A najlepiej jakby można było sprawdzić kadłub w jakimś tunelu aerodynamicznym w celu usunięcia oporów.
Kiedyś szukałem takiego tunelu żeby sprawdzić moje łódki, ale niestety nie udało mi się znaleźć.
Jakby ktoś z kolegów coś wiedział w tym temacie to proszę o informację.
(...)
Spieszę donieść...
1. Opór aerodynamiczny nadwodnej części łodzi jak najbardziej występuje ale czy odgrywa on tak istotną rolę w wyścigu - śmiem wątpić (chociaż należałoby to policzyć). Pamiętam swoje starty w latach osiemdziesiątych w klasie F1V, F1E i wtedy czołówka modelarzy polskich (np. Pan Aleksander Rawski) startowała "mocno kanciastymi" modelami (zwłaszcza w klasie F1E zasilanymi akumulatorami srebrowo-cynkowymi, które bezwzględnie musiały stać pionowo).
Opór Aerodynamiczny Łodzi= 1/2 ρV2ACx
A – powierzchnia czołowa łodzi
ρ – gęstość powietrza
V – względna prędkość łodzi w stosunku do powietrza.
Cx – współczynnik oporu aerodynamicznego
Zwracam uwagę, że gęstość powietrza wynosi 1,225 kg/m3 a gęstość wody aż 997 kg/m3 co pokazuje , że gęstość wody jest 800 razy większa od powietrza...To mówi o proporcjach względem siebie oporów hydrodynamicznego i aerodynamicznego. Istotnym parametrem jest współczynnik oporu aerodynamicznego zwany współczynnikiem kształtu - Cx. To właśnie ten współczynnik jest wyznaczany w tunelu aerodynamicznym.
2. Proponuję analogicznie zająć się oporem aerodynamicznym samochodów, gdyż jest im bardzo blisko do łodzi jeżeli chodzi o zjawiska aerodynamiczne. Opór aerodynamiczny bryły daje o sobie znać w sposób istotny dla parametrów łodzi dopiero przy prędkości 65km/h i w dużym przybliżeniu 46% jego całkowitej wartości wytwarza kadłub łodzi na odcinku dziób-środek cięzkości a ok. 12% wytwarzają krzywizny (zwężenia) przodu i tyłu kadłuba. Są to dane szacunkowe i mocno uogólnione.
3. Tunel aerodynamiczny. Załączam schemat i opis z roku 1942
ale istota jest pokazana (oczywiście bez torów pomiarowych). Gdy dołożymy jeszcze generator dymu w strumień przepływu strugi (papieros lub cygaro) to uzyskamy "grafikę" opływu. Ja podobną konstrukcję wykonałem i mogę polecić! Nie pamiętam w których numerach Modelarza ale był cykl artykułów Antoniego Trzcińskiego o wykonaniu i pomiarach w modelarskim tunelu aerodynamicznym.Jednak dzisiaj najlepiej będzie posłużyć się programem (ogólnodostępnym i przystępnym) XFLR5 http://www.xflr5.com/xflr5.htm,

 ....
....



Serwo cyfrowe kontra analogowe -różnice w działaniu
w Serwomechanizmy
Opublikowano
Odpowiem przypominając zasadę pracy serwomechanizmu:
Serwo składa się z silnika, zestawu kół zębatych, które zmniejszają prędkość i zwiększają moment obrotowy silnika, potencjometru sprzężenia zwrotnego, układu wzmacniacza sprzężenia zwrotnego i układu napędowego.
Serwo odbiera impuls z odbiornika radiowego, który informuje , w którą pozycję powinno się ustawić. W typowym systemie radiowym impuls ma szerokość, która zmienia się od 1,0 milisekundy w jednej skrajności do 2,0 milisekundy w drugiej skrajności, przy czym 1,5 milisekundy uważa się za punkt środkowy.
Potencjometr sprzężenia zwrotnego w serwie zapewnia zmienną rezystancję, która jest przekształcana na zmienny sygnał impulsowy wewnątrz wzmacniacza sprzężenia zwrotnego. Wzmacniacz sprzężenia zwrotnego porównuje następnie szerokość tego sygnału z sygnałem przychodzącym z odbiornika radiowego. Jeśli szerokość dwóch impulsów jest taka sama, serwo stoi w tej pozycji (odpowiedniej dla danej szerokości tych impulsów).
Po lekkim wychyleniu drążka sterującego w nadajniku szerokość impulsu pochodzącego z odbiornika radiowego zmieni się, a wzmacniacz sprzężenia zwrotnego wyczuje teraz tę różnicę między dwoma sygnałami (sygnał z odbiornika i sygnał z potencjometru). Wzmacniacz sprzężenia zwrotnego wyśle następnie sygnał do układu napędowego serwomechanizmu, a to spowoduje, że silnik obróci się we właściwym kierunku, dopasowując go do nowego sygnału wejściowego. Gdy silnik się obraca, obraca koła zębate w serwomechanizmie. Te koła zębate napędzają ostatecznie ramię wyjściowe i sprzężony z nim potencjometr sprzężenia zwrotnego. Gdy ramię wyjściowe obraca potencjometr, wartość rezystancji zmienia się, aż do osiągnięcia punktu, w którym odpowiada pozycji drążka sterującego nadajnika, a silnik serwa zatrzymuje się w tej nowej pozycji.
Ten proces powtarza się w kółko, setki razy na minutę, stale dopasowując pozycję serwomechanizmu do wychylenia drążka, które zadajemy w nadajniku.
W przypadku serw cyfrowych sygnały sterujące wysyłane są do silnika wielokrotnie szybciej powodując ciągłą zmianę kierunków obrotu silnika (prawo-lewo)w celu uzgodnienia położenia suwaka potencjometru i dźwigni serwa. Efekt jest taki, że słyszymy dźwięk przypominający brzęczenie. Dlatego jakość silnika i potencjometru sprzężenia zwrotnego („strefa nieczułości”) odgrywa zasadniczą rolę w występowaniu głośnej pracy serwa.
W przypadku serw analogowych mała częstotliwość uzgadniania położenia suwaka potencjometru z dźwignią skutkuje drganiami dźwigni (w przypadku niskiej jakości lub zużycia potencjometru lub silnika). W przypadku serw cyfrowych bardzo wysoka częstotliwość uzgadniania powoduje brzęczenie, które niekoniecznie wynika z niskiej jakości potencjometru lub silnika a może wynikać z bezwładności układu mechanicznego (silnik-przekładnia-potencjometr). Żeby to ustalić należy zmierzyć wartość trzech, wspomnianych wcześniej prądów, charakteryzujących każdy serwomechanizm. Gdy ich wartości są takie jak podaje producent serwa można dopuścić do bezpiecznej eksploatacji.