Mieciu11
-
Postów
167 -
Rejestracja
-
Ostatnia wizyta
Treść opublikowana przez Mieciu11
-
Przewijałem kiedyś tyle że mniejsze silniki dronowe klasy 2205. W moim przypadku aby zdjąć stojan wystarczyło przykręcić do czegoś silnik aby móc go mocno chwycić, np do karbonowego ramienia drona. Stojan chwytałem tego typu szczypcami do przykręcania śmigieł. https://www.nobshop.pl/szczypce-do-trzymania-silnikow-p-3105.html Mogą być również kombinerki (próbowałem i dają radę) tylko bardzo ważne żeby kombinerkami chwytać przez kilka warstw materiału bo można uszkodzić stojan i np mogą rozejść się blachy. Po złapaniu za łoże trzeba mocno złapać stojan i próbować go obkręcać, wcześniej można odciąć przewody w miejscu gdzie przechodzą przez łoże. Jak puści, po kilku obrotach można próbować ściągać stojan ale cały czas nim kręcić jak śrubą. Widoczny wcięcie w stojanie w silnikach które przewijałem nie pełniło żadnej funkcji, nie było żadnego klina, może jest to otwór po prostu do wprowadzenia kleju na aluminiową tulejkę aby osadzić stojan, ale nie wiem. U mnie dość łatwo dało się to zdjąć bez grzania, w twoim silniku może być trudniej bo stojan jest sporo dłuższy i może być potrzebne podgrzanie. Ważne żeby przed zdjęciem drutów sprawdzić połączenie czy jest w gwiazdę czy w trójkąt i policzyć dokładnie ilość zwojów, kolejność nawijania i kierunki, żeby potem nie wertować połowy internetu. Tak wygląda już przewinięty silnik, również widać to wcięcie jakby miał być tam klin ale nie było nic.

-
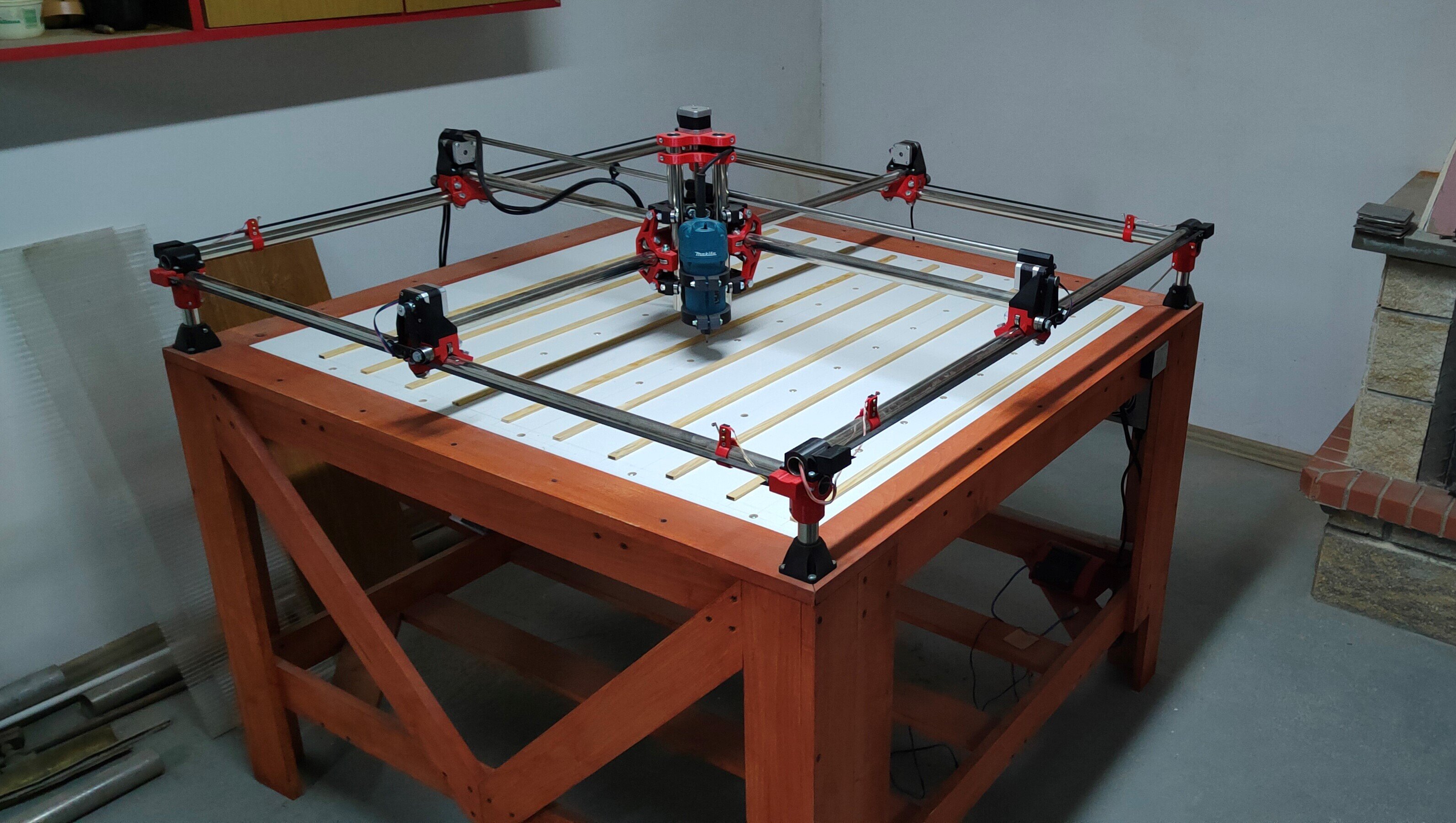
Tutaj można zobaczyć podobne rozwiązanie w drukowanej frezarce mpcnc, można podziwiać jaką precyzję przy jakich prędkościach udało się uzyskać autorowi. https://www.youtube.com/watch?v=zefnrPRvc9Q&t=286s&ab_channel=BraunsCNC Ja w swojej frezarce mimo sporych rozmiarów 1mx1m z frezem 6mm przy prędkości 2m/min uzyskuję bardzo dobrą precyzję, nie zauważyłem błędów z powodu rozciągania pasków. Ale ja tylko tylko frezuję w sklejce, nie wiadomo co by było z twardszym materiałem.
-
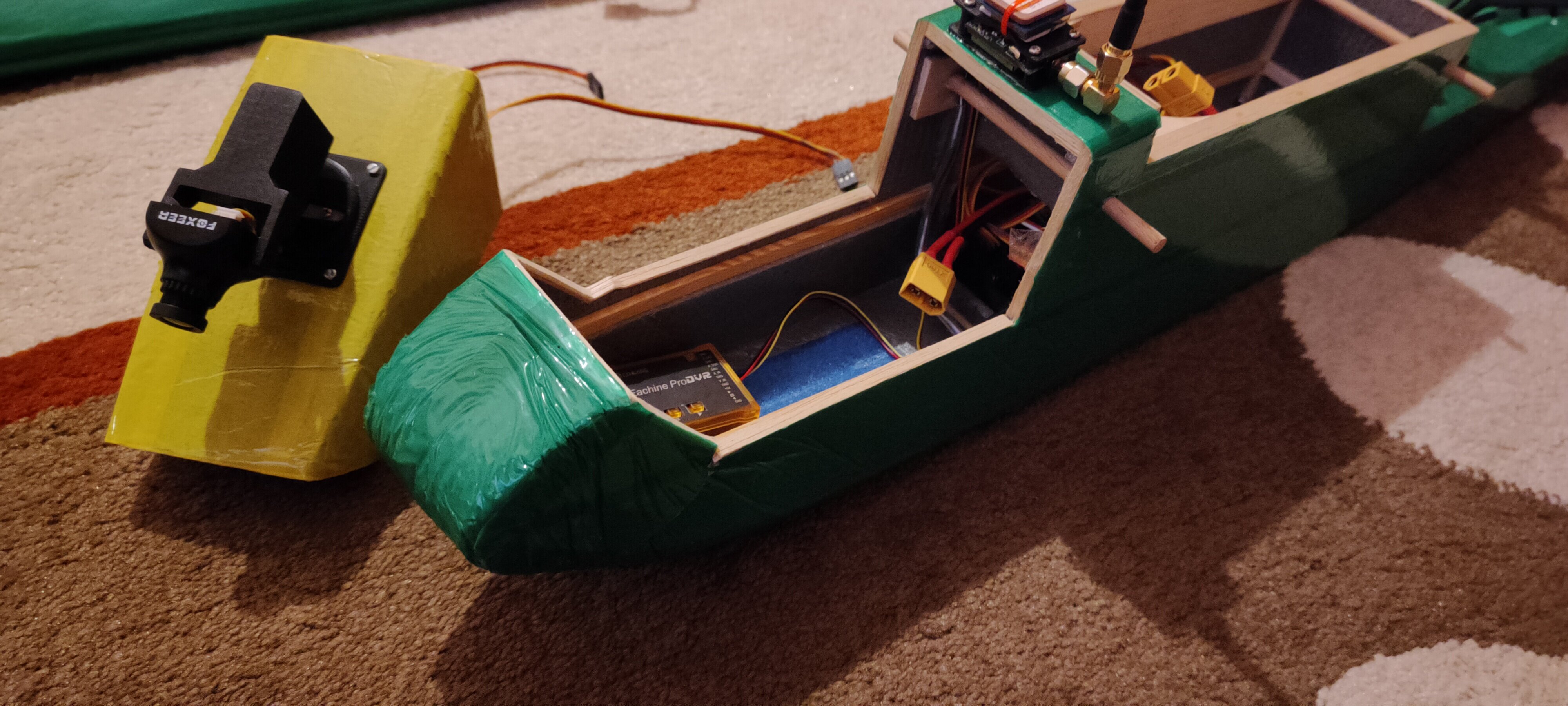
Dzisiaj po ponad dwudziestu lotach przydarzyło mi się dość spektakularne spotkanie z ziemią. Całość nagrała się na dvr w samolocie więc dokładnie można przeanalizować co się wydarzyło. A wniosek jest taki że prawdopodobnie zwiększenie obrotów silnika spowodowało wyrwanie wręgi silnika. Myślę że dałoby się to spokojnie opanować, niestety panika wzięła górę i nim się połapałem o co chodzi to już było przeciągnięte. Straty w sumie niewielkie, skrzydło nie ucierpiało natomiast z dziobu zrobiła się harmonijka. ?
-
Rzeczywiście, dziękuję bardzo za informację ? Niedługo na pewno się zdecyduję na któryś z nich ponieważ ta ilość przewodów już zaczyna denerwować. Ogólnie już dotarła do mnie paczka z kontrolerem. Wstępnie udało mi się go skalibrować w Mission Planner, wybrałem na początek tryb stabilizacji oraz RTL, natomiast mam problem z ustawieniem dedykowanego trybu w momencie awarii nadajnika. W przypadku odbiornika gdy symulowałem awarię poprzez odpięcie wtyczki to kontroler wykrywa awarię i przechodzi w tryb circle a po paru sekundach na RTL. Natomiast gdy wyłączam aparaturę to kontroler pozostaje na ostatnim wybranym trybie. Nie wiem czy to o to chodzi ale czy w przypadku wyłączenia aparatury zakres kanału throttle nie powinien spaść poniżej zakresu kalibracji? W programie jest ustawiona wartość kanału PWM na 950 a u mnie niestety przy wyłączonym osiąga wartość równą minimalnej wartości przy włączonym radiu. Czy jest możliwość aby to jakoś ustawić? Edit: Udało się rozwiązać problem, wystarczyło jedynie nieco przesunąć trymer przepustnicy do przodu i ponownie skalibrować radio ? Po tym jeszcze tylko wpisać odpowiednią wartość FS PWM.
-
Racja, zanim pomyślę o dronach to pewnie trochę zejdzie a i na rynku pojawią się nowsze konstrukcje, dlatego zdecydowałem się na f405 wing. Dodatkowo wysyłka z magazynu czeskiego więc za parę dni powinien być u mnie ? Na początku myślałem o tym ZOHD, bardzo mi się spodobał właśnie ze względu na prostotę oraz obsługę pwm. No ale właśnie wolałem coś o nieco bardziej zwartej konstrukcji, już z wbudowanym osd, czujnikiem prądu tak aby maksymalnie ograniczyć ilość przewodów. F7 to już niestety nie mój budżet ? Odbiornik ppm/sbus byłby najlepszy, jednak w moim przypadku wiązałoby się z wymianą modułu, dla frsky djt jakiego używam chyba nie ma żadnego odbiornika z pełnym zasięgiem. Na początek podziałam z konwerterem opartym na arduino nano, znalazłem w sieci kilka takich projektów np, https://github.com/speters/pwm2x
-
Witam, Poszukuję w miarę prostego kontrolera lotu do samolotu. Zależy mi bardzo na podglądzie danych OSD, stabilizacji i powrocie do domu. Niestety do tej pory nie miałem zbytnio do czynienia w tym temacie, a na dodatek na rynku jest tyle różnych kontrolerów typowo do dronów, samolotów że ciężko wybrać coś konkretnego. Czy coś takiego spełni moje oczekiwania? https://www.banggood.com/Matek-Systems-F405-WING-(New)-STM32F405-Flight-Controller-Built-in-OSD-for-RC-Airplane-Fixed-Wing-p-1292190.html?cur_warehouse=CZ&rmmds=search do tego moduł GPS: https://www.banggood.com/Beitian-Dual-BN-220-GPS-GLONASS-Antenna-Module-TTL-Level-RC-Drone-Airplane-p-1208588.html?cur_warehouse=CZ&rmmds=search&ID=6300460 Ewentualnie czy dałoby się przystosować kontroler typowy dla dronów, tak aby w przyszłości gdybym bardziej zainteresował się racer-ami można było bezproblemowo go przełożyć? Co do tego f405-wing to z opisu wynika że współpracuje z odbiornikami sbus jednak czy jest jakaś opcja aby podpiąć odbiornik z wyjściami PWM, ponieważ tylko z takich korzystam czy konieczny będzie zakup konwertera? Pozdrawiam serdecznie ?
-
CzarDrill - spalina 600mm rozpiętości
Mieciu11 odpowiedział(a) na czarobest temat w Modele spalinowe
Też mam takie same odczucia co do tej folii. Zanim nauczyłem się nią oklejać udało zepsuć mi się parę elementów. Przy oklejaniu nią bardzo trzeba uważać aby nie przekroczyć temperatury bo wtedy klej zaczyna się mocno przylepiać do balsy a folia na nim zaczyna pływać i obkurcza tworząc pofałdowania i bardzo brzydkie przejaśnienia. Z moich prób oklejania wyszło że najbezpieczniej jest przyklejać ją za pomocą suszarki, rozgrzewać punktowo folię i dociskać do elementu, temperatura suszarki jest na tyle niewielka że folia nie obkurcza się natomiast bardzo łatwo klei się do powierzchni. Potem można delikatnie przeprasować żelazkiem, ale bardzo ostrożnie z temperaturą i najlepiej przez jakąś wkładkę bawełnianą, bo ślady to na niej zostają. Moim zdaniem folia o wiele gorsza od chociażby oracover standard. -
Prace przy modelu są już właściwie zakończone, pozostało tylko skończyć oklejać ale jakoś nie mogę się do tego za bardzo zmusić. W obecnej formie model leżakuje już dość długo ale mam nadzieję że w najbliższym czasie będę próbował oblatywać . Muszę tylko poczekać aż dotrze pakiet i świece do motorka, bo poprzednią przypadkiem upaliłem. Całość będzie zasilania z pakietu life 1100mah prawdopodobnie z diodą żeby nieco obniżyć napięcie. Jeśli chodzi o masę do lotu to myślę że nie będzie większa jak 2300 gram wraz z paliwem, więc jest raczej w normie. Kabinka zrobiona z dużej butelki ogrzewanej na kopycie drewnianym. Nie wyszło może idealnie, z bliska są widoczne małe ryski ale jakoś bardzo mi to nie przeszkadza, może jak kiedyś będą chęci i przy okazji dorwę lepszą butelkę to coś się pomyśli.
-
Niestety dokładnie nie dokumentowałem poszczególnych etapów z budowy, więc zdjęć ze składania przodu nie posiadam. Ale jak będę w domu to mogę porobić fotki wnętrza po zdjęciu silnika, co może trochę wyjaśni. Ale wcześniej jak za dwa tygodnie niestety nie dam rady.
-
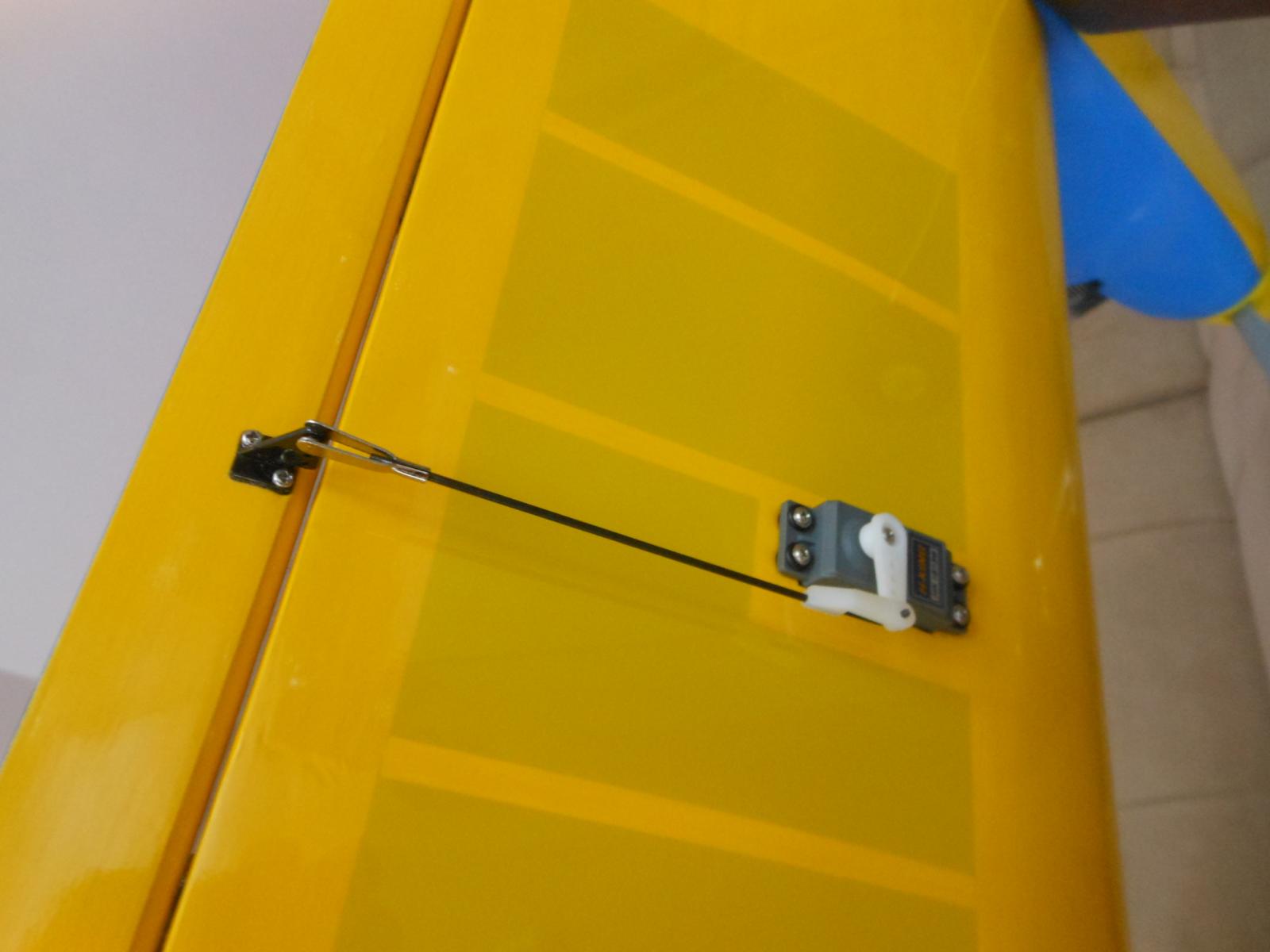
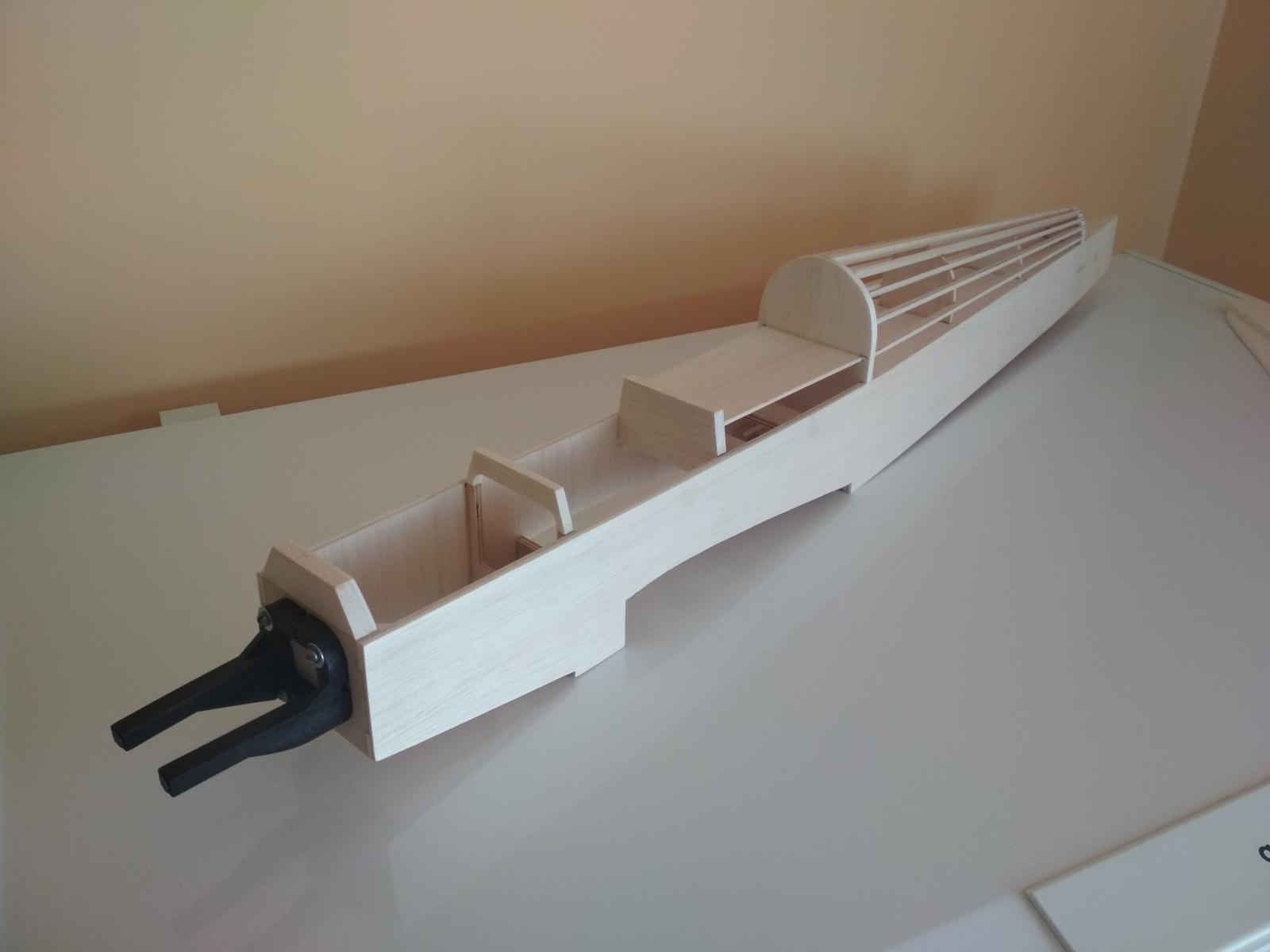
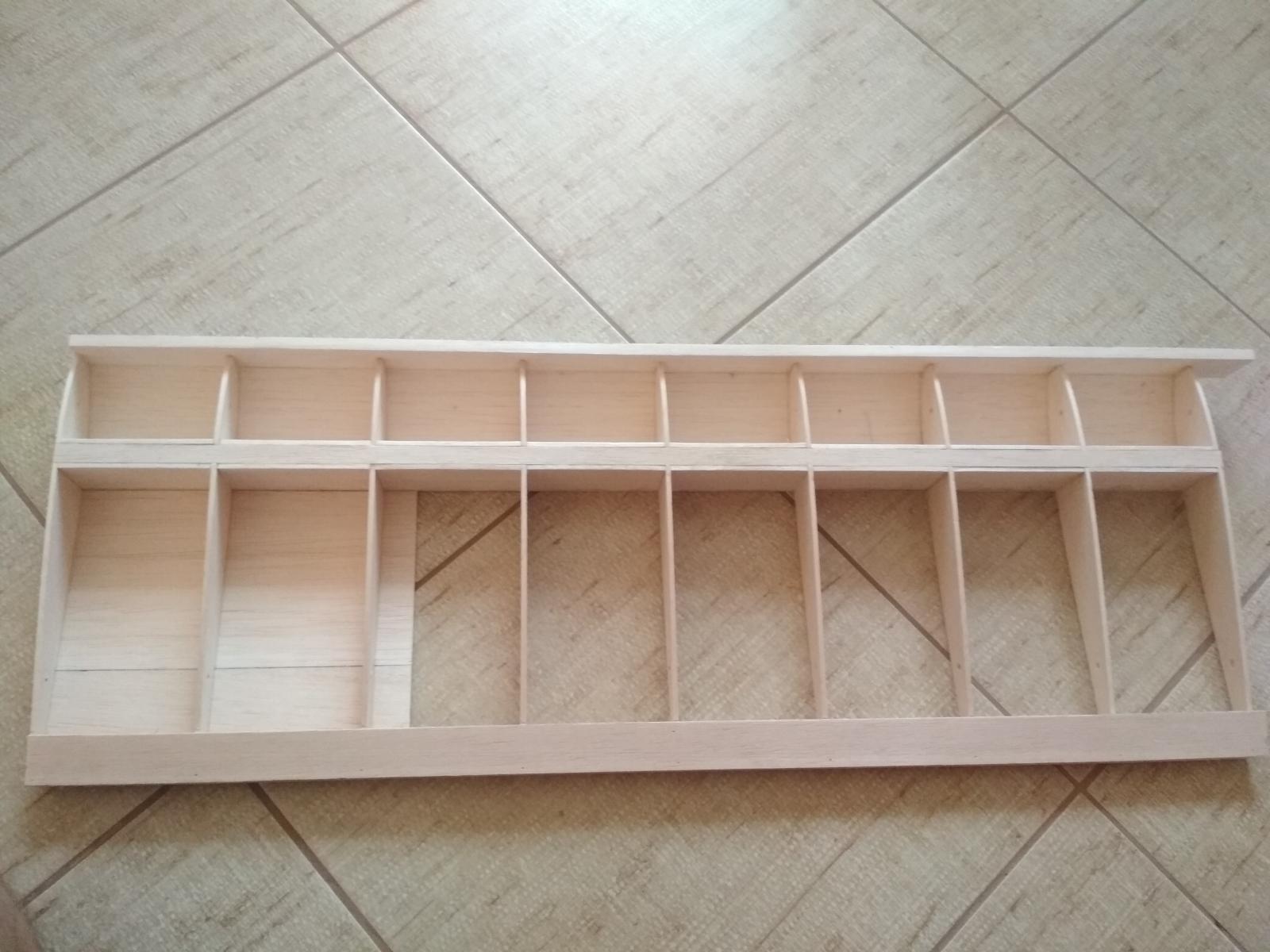
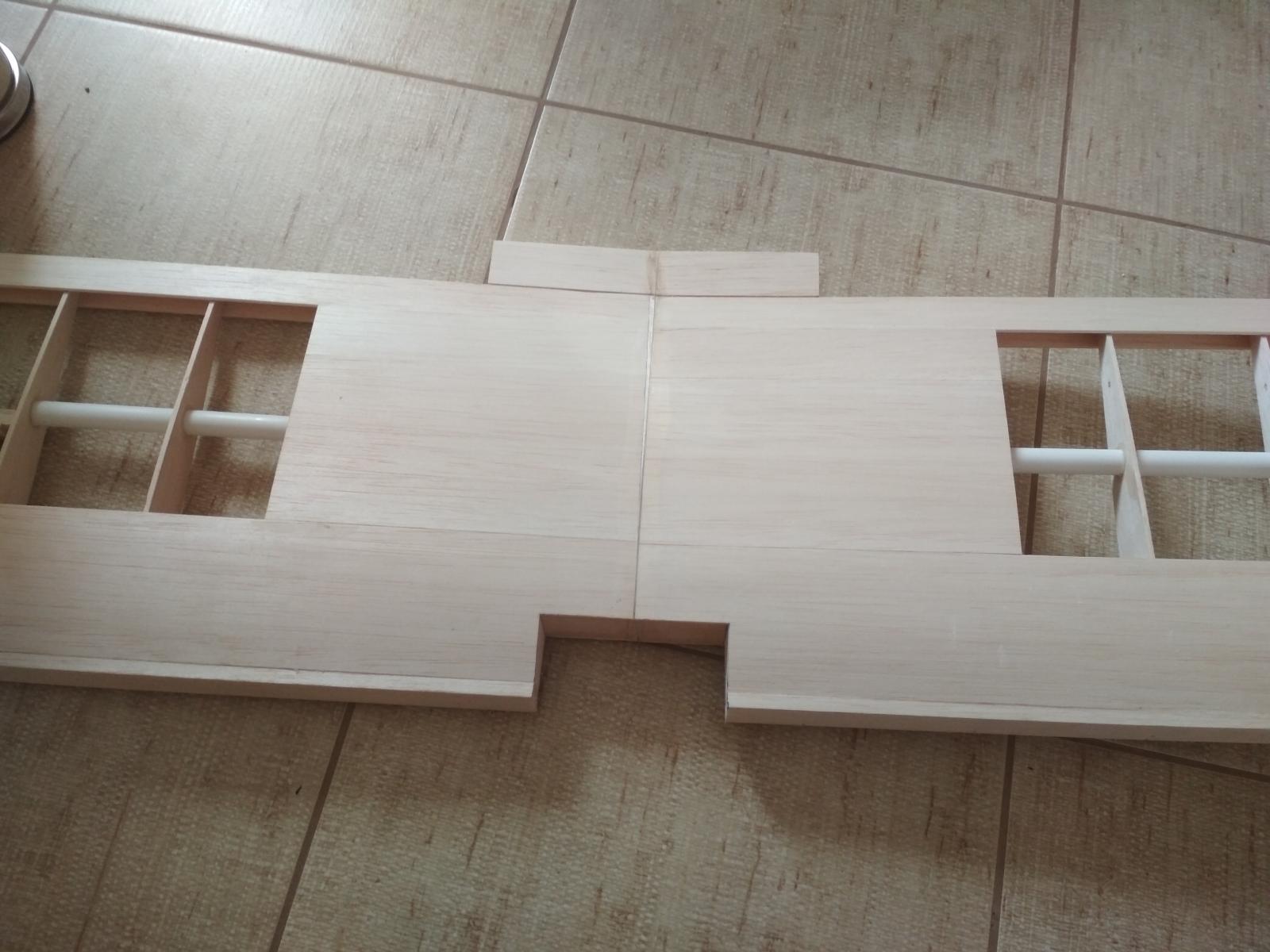
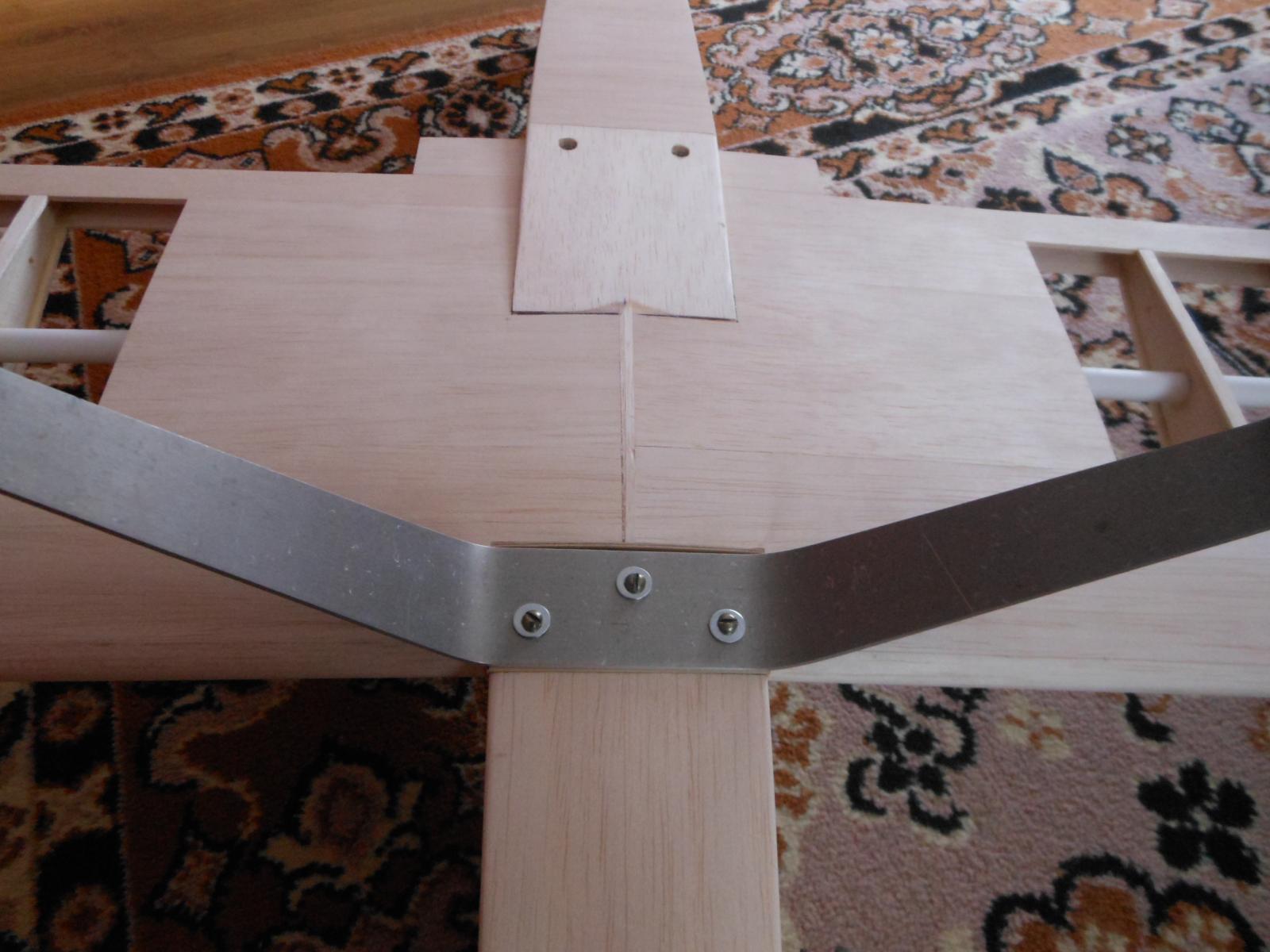
Witam po dłuższej przerwie. Ze względu na ilość obowiązków budowa znacznie się przedłuża, choć mam nadzieję że wiosną uda się model ulotnić. Jak widać na zdjęciach zdecydowałem się na podwozie duralowe z racji że czasem zdarza mi się nieco mocniej przyziemiać, więc w moim przypadku przy zastosowaniu drutów pewnie wyrwałbym całą krawędź natarcia podczas pierwszego lądowania Wymagało to jednak kilku modyfikacji co widoczne jest na zdjęciach.
-
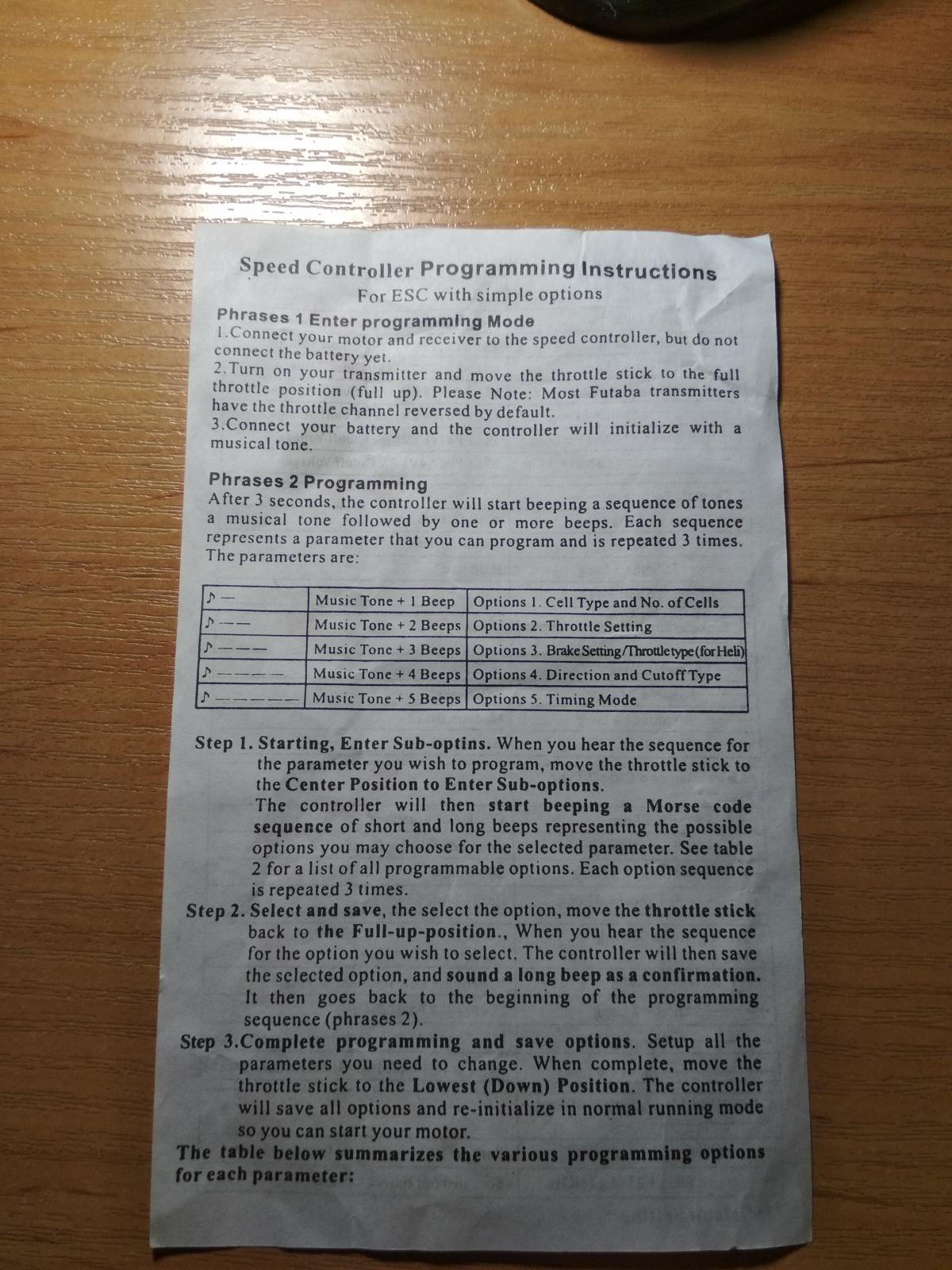
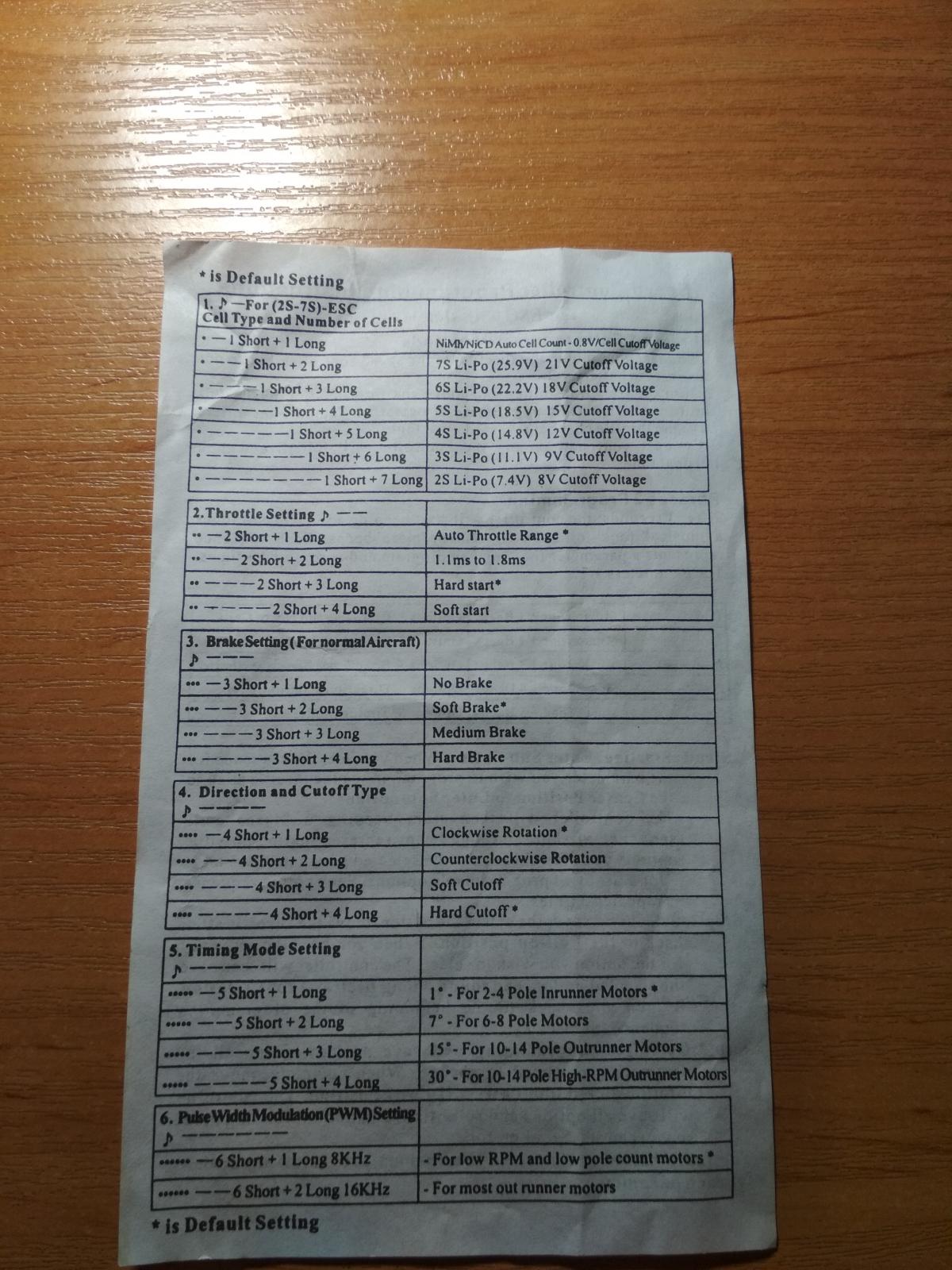
Nie wiem czy w czymś to pomoże ale ja mam u siebie dość podobny regulator, tylko w wersji 80a, choć swego czasu na ali chyba były również 120. Mowa tu o tym: https://pl.aliexpress.com/item/1piece-80A-ESC-Come-With-5A-BEC-For-Brushless-Motor-RC-Model-Part-Toy-Plane-Part/32269719950.html?spm=a2g0s.9042311.0.0.27425c0f21Hnek Krótka instrukcja programowania:
-
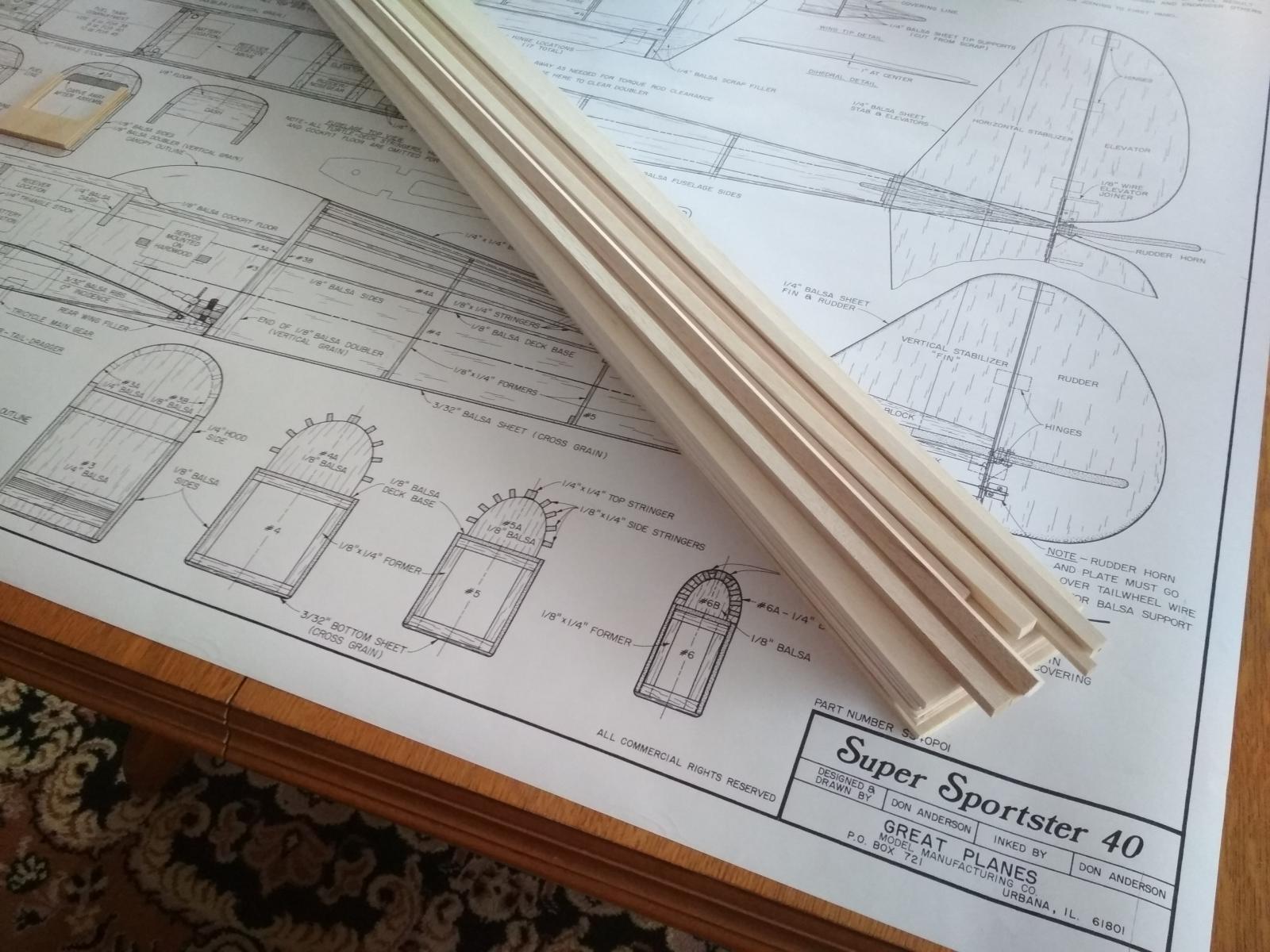
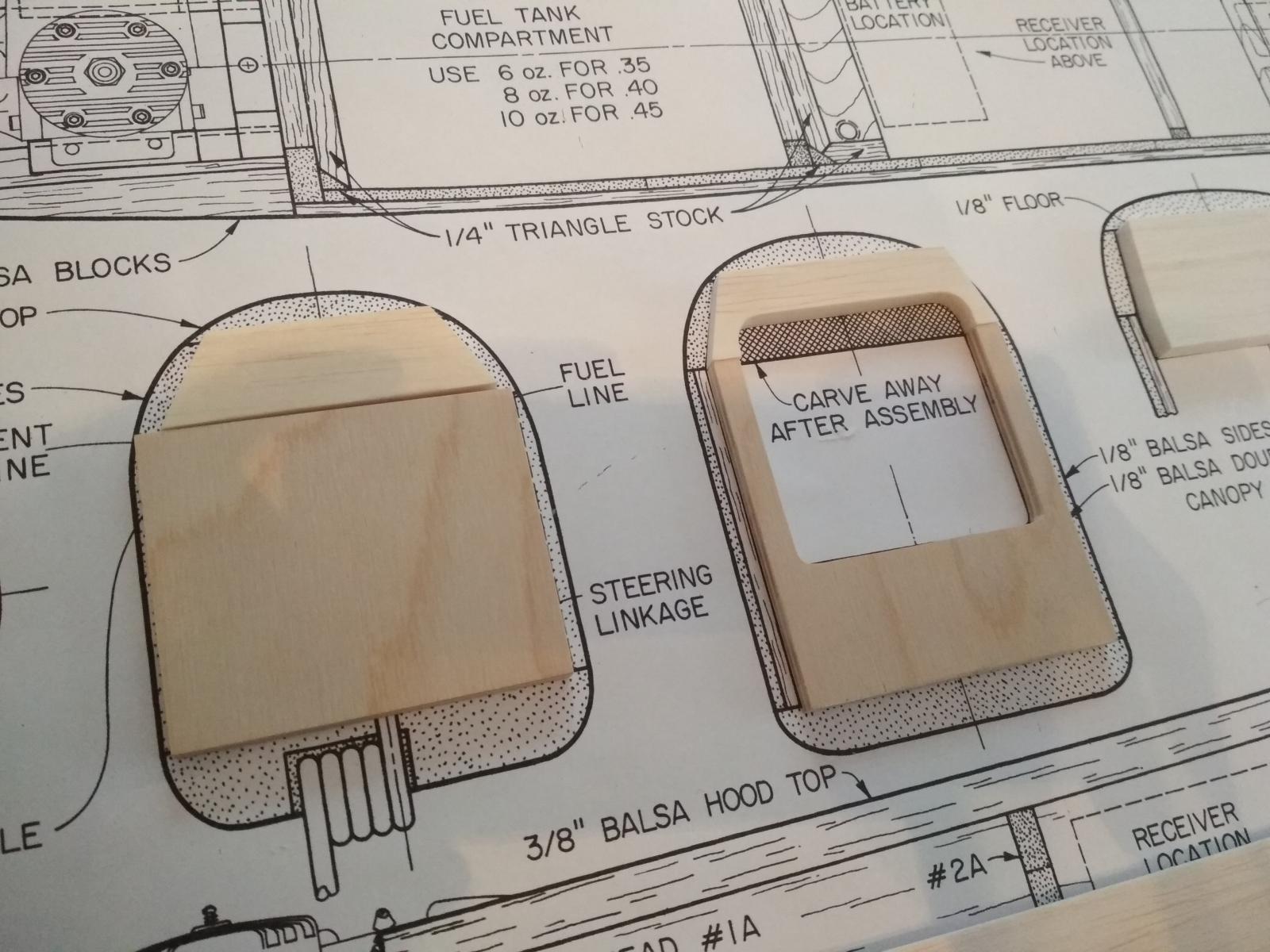
Cześć, Czas w końcu zabrać się za budowę kolejnej maszynki, która mocno urzekła mnie swoim wyglądem. Mowa tu o modelu super sportster 40. Jak wiadomo sezon już dawno rozpoczęty a ja dopiero biorę się za budowanie więc z założenia chciałbym go dość szybko ukończyć. Na szczęście konstrukcja jest bardzo prosta, choć nie wiem czy nie będą konieczne jakieś modyfikacje. Bardzo nie podoba mi się sposób w jaki wykonane jest podwozie a jest nim drut osadzony w skrzydle. U mnie podwozie będzie raczej wykonane z duralu gdyż czasem zdarzają mi się nieco twardsze lądowania . Przez to również skrzydło będzie wymagało niewielkich zmian m.in będzie trzeba usunąć część krawędzi natarcia, aby podwozie mogło się pomieścić. Kolejna rzecz która nieco mnie niepokoi to niezgodność jednostek, na planach są calowe i np wręga silnikowa to 1/4'' czyli ok 6,4mm, a ja mogę użyć 6mm, potem jest już chyba tylko 8mm, (mowa o modelarskiej). To samo stery i stateczniki, jedyna jaką mogę dostać w pobliskim sklepie to balsa 6 lub 8mm. Czy zatem jeśli użyję nieco cieńszych materiałów to nie osłabi to drastycznie konstrukcji? Co do wyposażenia to pewne jest że będzie w nim siedział silnik asp s46aii, resztę się domówi jak już będą jakieś większe postępy. Jak na razie tylko wydrukowane plany: Pozdrawiam
-
Witam, Poszukuję docelowego napędu do mojego vrx sword-a. Obecnie mam w nim silnik szczotkowy 550 i nawet dobrze z nim sobie daje radę, ale wiadome że prędzej czy później odmówi on posłuszeństwa. Chciałbym aby mógł jeździć na pakiecie 2s, zresztą wsadzenie 3s byłoby chyba dla modelu zabójstwem. Silnika o jakich obrotach powinienem szukać? Zębatka atakująca to 17t, a odbiorcza 65t. Znalazłem taki zestaw, cena bardzo przystępna, tylko czy obrotami dobrze zgra się z modelem? https://pl.aliexpress.com/item/NOWA-Aktualizacja-Wodoodporna-3650-3900KV-RC-Silnik-Bezszczotkowy-60A-ESC-programator-zestaw-Combo-Zestaw-do-1/32850306135.html?spm=a2g17.search0104.3.9.11a81712evPYjB&ws_ab_test=searchweb0_0%2Csearchweb201602_5_10152_10151_10065_10344_10068_5722815_10342_10343_10340_5722915_10341_10698_5722615_10697_10696_10084_10083_10618_10304_10307_10301_5722715_5711215_10059_308_100031_10103_441_10624_10623_10622_5711315_5722515_10621_10620%2Csearchweb201603_25%2CppcSwitch_5&algo_expid=f59a0823-9909-4785-9a34-d2d02d18d4af-1&algo_pvid=f59a0823-9909-4785-9a34-d2d02d18d4af&transAbTest=ae803_2&priceBeautifyAB=0 Pozdrawiam
-
A wracając do pytania o tanie osd, to natknąłem się na wątek na zagranicznym forum https://www.rcgroups.com/forums/showthread.php?1473207-Diy-osd-%28Arduino-and-opensource%29 Autor udostępnia schematy jak i również sam kod do arduino, także budowa nikomu nie powinno sprawić problemu. Sam na szybko coś takiego złożyłem i nawet coś to pokazuje, choć nie wiadomo co będzie jak gps się dołączy
-
A co sądzicie o czymś takim: https://www.gearbest.com/rc-quadcopters/pp_1499660.html?wid=21&utm_source=mail_api&utm_medium=mail&utm_campaign=GB_weekend_180209_1518160127&eo=EDhFaCSp1qoVrnpZ Szukam czegoś jako wstęp do racerów ale również żeby spokojnie i rekreacyjnie sobie polatać. Ma to już link na 5.8ghz i co najważniejsze jest niewielkie. Czy warto coś takiego kupić, czy raczej jest to wyrzucenie pieniędzy w błoto. PS Przepraszam że tak się wtrącam do tematu
-
Napięcie właśnie odrobinę niższe, około 1.35v, silnik łatwo palił więc wyżej nie ustawiałem żeby jej nie uszkodzić. Jak się uda to w tym tygodniu odpalę go jeszcze kilka razy i poeksperymentuję trochę z innymi ustawieniami silnika i inną świecą, może uda się coś ustalić.
-
Przepraszam że dopiero teraz odpisuję ale miałem trochę problemów z komputerem. Aktualnie w silniku mam założoną świecę os no.8, chłodniejsza to będzie chyba no.10 ale czy nie będzie ona za zimna jak na ten silnik? Zasilacz to samoróbka na stabilizatorze lm350, dość mocno się to grzeje ale dobrze żarzy świecę i daje te stałe ponad 3 ampery.
-
Jak kręcę go w lewo to za każdym razem uruchamia się w prawo, pracuje wtedy trochę mniej równo i zdecydowanie gorzej wkręca się na obroty. Natomiast jak kręcę w prawo to wtedy loteria, czasem się załączy w prawo a czasem w lewo. A dziękuję Jak już go do goła rozebrałem, to żal byłoby go z zewnątrz nie doczyścić. Szczoteczka do zębów plus do tego środek do mycia wanien i całkiem niezły efekt można osiągnąć.
-
No właśnie nie było żadnej uszczelki, czyli może to być tego przyczyna? Czy taką uszczelkę można sobie dorobić np z czegoś takiego czy musi być oryginał? http://allegro.pl/material-arkusz-plyta-na-uszczelki-300x500x0-3-mm-i7092561832.html Ponowne próby coś niecoś pomogły, kilka razy nawet odpalił w dobrą stronę ale tylko podczas kręcenia w prawo. Tu przykład:
-
Witam, Dzisiaj wykonałem pierwsze próby odpalenia motorka i mimo dość niskiej temperatury silnik bardzo szybko zaskoczył. Jedno co mnie zdziwiło to że za każdym razem odpala w prawo. Próbowałem kilkukrotnie odpalać kręcąc w obie strony ale nic to nie zmienia. Co może być tego powodem?
-
Bardzo dziękuję za rady, niestety tak już jest ze mną że wszystkiego wolę być pewny a zwłaszcza jak dotyczy to tematów na których się totalnie nie znam. Tak więc jak tylko dotrą łożyska to zabieram się za składanie i będziemy próbować odpalać. Pomierzyłem również trzpień z każdej strony i jest na równo 5.95mm Zakładając ten temat chciałem tylko poznać opinię innych, którzy są w modelarstwie od wielu lat i mają za sobą ogromny bagaż doświadczeń. Jak ktoś zrozumiał to w sposób że coś co otrzymałem za darmo próbuję krytykować to przepraszam, ale nie miałem takiego zamiaru.
-
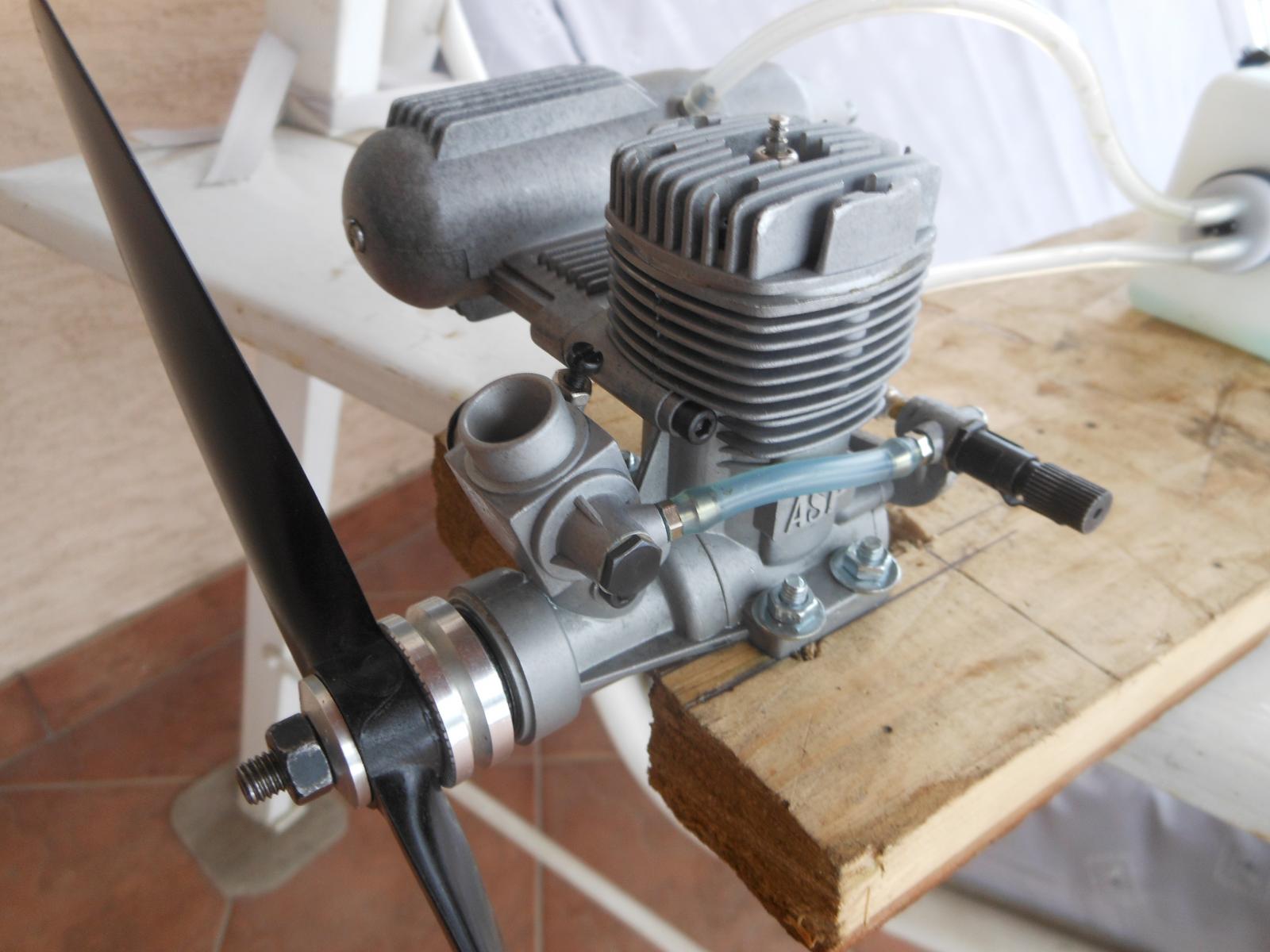
Witam, Ostatnio wpadł w moje ręce silnik asp s46aii, który to otrzymałem za darmo od pana Jarka (jarek996) za co jeszcze raz bardzo dziękuję. Postanowiłem uruchomienie silnika zostawić sobie na później a najpierw dokładnie go przejrzeć żeby uniknąć jakiejś niemiłej niespodzianki. Na początku rozebrałem silnik na części pierwsze, oryginalne łożyska są bardzo mocno zużyte, zostaną one w najbliższym czasie wymienione. Podczas rozbiórki zauważyłem że na panewce występuje luz, nie jest on "chyba" jakiś duży, ale przy maksymalnym górnym położeniu tłoka luz ten można łatwo wyczuć na śmigle. Czy korbowód wymaga wymiany, czy jest to raczej normalne? Filmik tylko taki bo łożyska już zdemontowałem ale może pomoże zobrazować problem. Pozdrawiam,
-
SQ11 mikro kamera z kartą SD i TVoutem -test w locie.
Mieciu11 odpowiedział(a) na maxiiii temat w Kamerka na pokładzie - video
Co do problemu to się nie wypowiem, nie miałem nawet tego w rękach. Ale po obejrzeniu kilku filmików z modyfikacji pewnie skuszę się na nią. A polega ona na wymianie obiektywu na taki o krótszej ogniskowej oraz polu widzenia 180 stopni. Obraz jak na moje oko o wiele lepszy, większy kąt, większa płynność, zniwelowany efekt jello, z resztą można sobie porównać. poradnik z modyfikacji: -
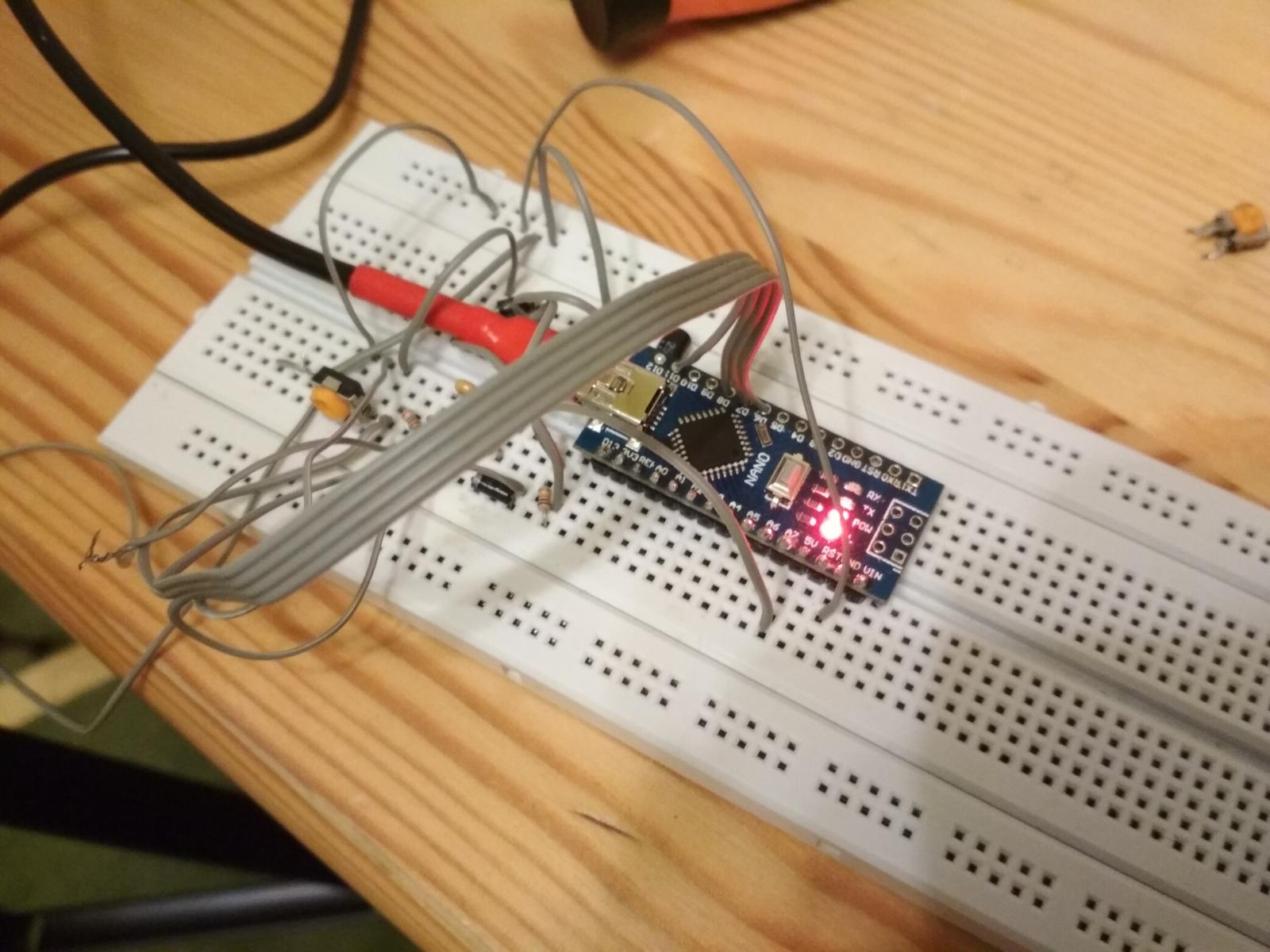
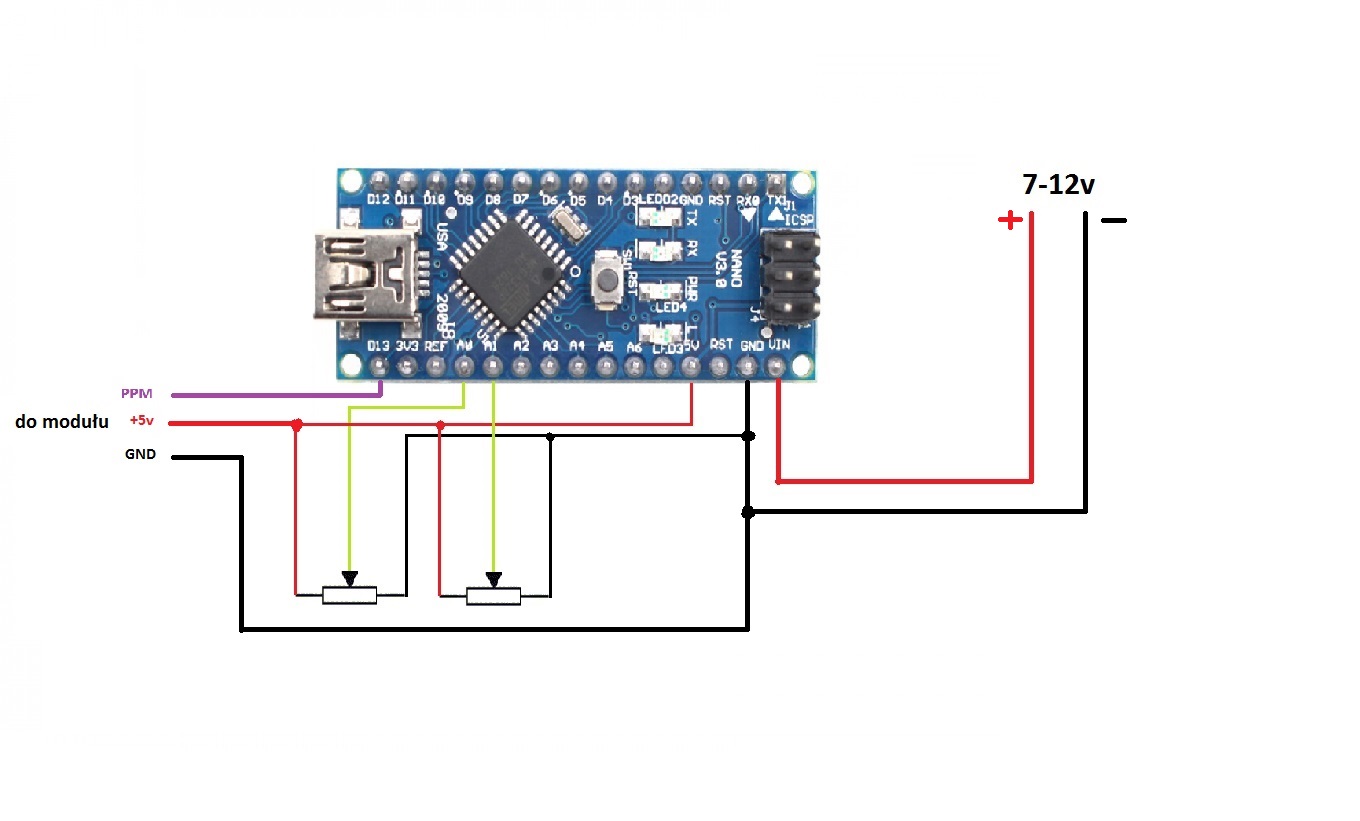
Witam, Ostatnio bardzo mocno zainteresował mnie temat budowy a właściwie złożenia jak najniższym kosztem aparatury, która z powodzeniem miałaby być używana w sterowaniu kołowymi modelami rc. Projekt będzie oparty na fabrycznym module nadawczym turnigy 9x, który od jakiegoś czasu leży u mnie bezczynnie. Głównym zadaniem jest wygenerowanie sygnału ppm wszystkich kanałów i sterowanie każdym z nich odpowiednim czasem trwania impulsu od 1 do 2milisekund(minimalne i maksymalne wychylenie serwa). Idealnie nadaje się do tego arduino w moim przypadku nano które na aliexpress można zdobyć za około 7zł. Najtrudniejszym jest napisanie programu, który to wszystko obsłuży, więc na razie wykorzystam kod który można znaleźć w sieci. Być może jak trochę przysiądę do programowania to uda się coś takiego napisać Niestety twórca nie przewidział w kodzie trymerów ani rewersów, więc pozostanie tylko zewnętrznie wpływać na działanie kanałów. Rewers można uzyskać np prostym przełącznikiem zmiany kierunku obrotów silnika, który będzie przełączał na potencjometrze 5v oraz GND. Nie mam jednak pomysłu jak rozwiązać problem trymowania. W kodzie autor przewidział sterowanie sześcioma kanałami. Potencjometry do nich będą podpięte do wejść arduino a0-a5, natomiast sygnał ppm wychodzi z pinu cyfrowego D13 wprost do modułu. Podłączenie tak jak na schemacie. Dziś pierwsze próby i wszystko ładnie działa. cdn. Wątek, z którego zaczerpnąłem kod: https://www.rcgroups.com/forums/showthread.php?2037080-DIY-Arduino-joystick-to-PPM Kod: #define NB_WAY 6 // number of ways #define LOW_LENGTH 300 // How long last (in µs) a low between 2 pulses #define MIN_PPM_PULSE 600 // minimum pulse length in µs #define PPM_PULSE_LENGTH 1200 // how much more µs will last the max pulse length #define PACKET_LENGTH 20000 // How long (µs) last a full trame // trame length is fixed ! Every trame will make PACKET_LENGTH µs ! // MUST NO BE MORE THAN 32ms !!! (timer's prescaler constraint) #define PPM_OUTPUT 13 // OUTPUT PIN int way_value[NB_WAY]; int way_pin[NB_WAY]; int way_min[NB_WAY]; int way_max[NB_WAY]; int i = 0; int p = 0; // temp var for duty cycle calculation int last_i_timer = 0; // last way's value sent through PPM signal unsigned long int trame_elapsed_time = 0; bool output_state = LOW; void setup() { // ppm output : pinMode(PPM_OUTPUT, OUTPUT); digitalWrite(PPM_OUTPUT, output_state); // inits arrays for(i=0;i<NB_WAY;i++) { way_pin = 14 + i; pinMode(way_pin, INPUT); way_value = analogRead(way_pin); way_min = way_value; way_max = way_value; } // init timer cli(); // desactivation interruptions TCCR1A = 0x00; // set timer1 registers to 0 TCCR1B = 0x00; TIMSK1 = 0x00; OCR1A = 65535;// set to the max // CTC mode: TCCR1B |= (1 << WGM12); // prescaler to 8, that allow (@16mhz) 32.8ms trame TCCR1B |= (0 << CS10); TCCR1B |= (1 << CS11); TCCR1B |= (0 << CS12); // timer activation TIMSK1 |= (1 << OCIE1A); sei(); for(i=0;i<NB_WAY;i++) { way_min = 512; way_max = 1023; } } ISR(TIMER1_COMPA_vect) { TIMSK1 &= (0 << OCIE1A); if(output_state) { // END OF A HIGH, we have to wait LOW_LENGTH ms before next pulse output_state = LOW; digitalWrite(PPM_OUTPUT, output_state); OCR1A = 2 * LOW_LENGTH; // set when next timer interruption will occur TIMSK1 |= (1 << OCIE1A); // restart timer trame_elapsed_time += LOW_LENGTH; } else { // END of a LOW_LENGTH, new pulse ! output_state = HIGH; digitalWrite(PPM_OUTPUT, output_state); if(last_i_timer >= NB_WAY) // last way, so wait until next packet { OCR1A = (2 * PACKET_LENGTH) - (trame_elapsed_time * 2);// set when next timer interruption will occur TIMSK1 |= (1 << OCIE1A); // restart timer last_i_timer = 0; trame_elapsed_time = 0; } else { OCR1A = 2 * way_value[last_i_timer];// set when next timer interruption will occur TIMSK1 |= (1 << OCIE1A); // restart timer last_i_timer ++; trame_elapsed_time += way_value[NB_WAY]; } } } void loop() { for(i=0;i<NB_WAY;i++) { // Read current value of way i : p = analogRead(way_pin); // auto calibration... if(p > way_max) way_max = p; if(p < way_min) way_min = p; // Arduino map function sucks way_value = MIN_PPM_PULSE + PPM_PULSE_LENGTH * (float)((float)(p - way_min) / (float)(way_max - way_min)); } }
-
Przy każdym zakupie droższego sprzętu z chińskich ogłoszeń trzeba się dobrze zastanowić, czy jest to w ogóle opłacalne. Cło i vat przy tej kwocie i gabarytach będą doliczone na 90%. Dojdą do tego jeszcze dodatkowe opłaty za załatwienie z urzędem celnym, m.in wysłanie listu, przedstawienie do kontroli czyli za samą procedurę oclenia. Wychodzi dodatkowe 20zł. Ostatnio na własnym przykładzie doświadczyłem że również na niewielkie i lekkie paczki mogą zostać nałożone opłaty jeśli wartość jest wystarczająco duża.