ssuchy
-
Postów
1 112 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
14
Treść opublikowana przez ssuchy
-

Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Roman, ale schemat w tym przypadku jest wyjątkowo niezłożony - dosłownie kilka elementów "na krzyż", zarówno przy nadajniku, jak i odbiorniku. Dla kogoś kto choć trochę zna się na elektronice, odtworzenie schematu na podstawie przedstawionych przeze mnie połączeń na płytce uniwersalnej, to dosłownie minutka roboty, a dla kogoś kto jest mniej obeznany to i tak schemat niewiele wyjaśni, bo cała idea ukryta jest w sofcie i bez jego modyfikacji nic w hardware nie zmienimy, zwłaszcza, że nie ma tu typowego rozdziału między logiką a radiówką, jak bywało to dawniej (kiedy mieliśmy dostępny w układach kompletny sygnał PPM, po kodowaniu: nadajnik, czy przed dekodowaniem: odbiornik) - tutaj tak to nie działa. Elektronika/soft są opracowane przez kol. Piotra bardzo optymalnie (o czym świadczy spora uniwersalność tej aparatury, mimo tylko 1KB pamięci mikrokontrolera), a wyjątkowa prostota układu (to zwróciło moją uwagę na ten projekt) daje nawet możliwość montowania całości "na pająka" bezpośrednio na płytkach modułów RF (tak jak to robi kol. Sławek, o czym wcześniej wspominałem). Jednak bardziej eleganckim rozwiązaniem wydało mi się zmontowanie tegoż chociażby na płytce uniwersalnej. Dlaczego na uniwersalnej - bo dedykowane PCB to dodatkowy nakład roboty i kosztów (wg. mnie uzasadnione tylko przy serii), kąpiele trawiące, termotransfer, metoda foto, a może ręczne malowanie? Moim zdaniem za dużo zachodu, skoro np. chcemy sobie zmontować jeden nadajnik i dwa odbiorniki i całkiem łatwo robi się to na uniwersalkach. Założyłem sobie, że projekt ma być (na ile się da) "budżetowy" i dla "ludu" (czytaj: modelarzy , którzy potrafią trzymać lutownicę i będą mieli dodatkową satysfakcję z własnoręcznego wykonania apki np. dla wnuka: dziadek jesteś "WIELKI" ), nie tylko dla modelarzy-elektroników amatorów. Kupujemy elementy, składamy, ściśle trzymając się prostej instrukcji (mam nadzieję, że taka jest ) i to ma działać, kropka. Zbiorczy plik archiwalny (ze schematami, fotami, zwartym opisem) na koniec będzie - to dobry pomysł i jestem jak najbardziej za. Co się tyczy źródeł softu, to będę jeszcze naciskał autora, może w końcu się zgodzi (tym bardziej, że projekt nie jest już "pierwszej świeżosci" - wstępne przedstawienie na "elce": 2010, publikacja w EP: 5/2011) - opisy te dotyczą samej elektroniki sterowania R/C i w EP nie ma nic na temat II wersji aparatury, do której poprawki w softcie kol. Piotr przygotował na moją prośbę. Ja w tym temacie będę starał się przedstawić moją propozycję budowy KOMPLETNEJ aparatury dla modeli w oparciu o ten projekt - przede wszystkim dla mini/mikro latania w tym proste w budowie dodatki dla odbiornika: mikrowzmacniacz prądowy, mikroregulator silnika DC (EDIT: 01-12-2017; opis jest już TUTAJ), mikrokonwerter serwo-siłownik magnetyczny. Również schemat nadajnika będzie bardziej rozbudowany, niż to ma miejsce w publikacjach źródłowych (o niezbędne przełączniki, dające możliwość praktycznego korzystania z aparatury). -
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
No i w zasadzie na tym kończy się opis wykonania odbiornika. Zostało jeszcze do omówienia kilka drobiazgów (mikrowzmacniacz prądowy i mikroregulator obrotów do silnika DC - dla małych modeli, dedykowane do tej aparatury i być może opiszę jeszcze konwerter sygnału servo-actuator), które przedstawię (mam nadzieję) niebawem w stosownym miejscu na forum. W związku z powyższym mam pytanie do kolegów zainteresowanych tym tematem. Czy taki sposób opisu, jaki przedstawiłem w TYM poście jest właściwy i nie wymaga dodatkowych wyjaśnień? Podobnie zamierzam opisać wykonanie nadajnika. Z założenia opis składania miał być na tyle "łopatologiczny", żeby każdy kto potrafi dobrze lutować, a niekoniecznie zna się na elektronice (jest "na bakier" z analizą schematów elektronicznych), mógł zrobić sobie taką aparaturę. Czy to mi się udało? W każdym bądź razie wystarczy, że: - będziecie trzymać się moich wskazówek (wszystko co opisuję najpierw sam sprawdzam) - dobrze polutujecie (bez zwarć, przerw, "zimnych lutów") - uP zostanie poprawnie zaprogramowany (w odbiorniku i nadajniku) - opis programowania własnej roboty programatorem zamieściłem TUTAJ (w razie konieczności doprecyzowania, proszę pytać) ... a aparatura będzie działać "na bank". Jeśli temat będzie cieszył się choć minimalnym powodzeniem, to w przyszłości możemy wrócić do schematów, gdyby znalazła się osoba chętna do współpracy przy opracowaniu dedykowanych PCB, ale to już po kompletnych testach aparatury (jak zda egzamin w terenie), bo na razie testy są tylko warsztatowe, a być może coś jeszcze trzeba będzie zmieniać. Mogę również (przyszłościowo w razie zainteresowania) zorganizować zbiorowy zakup wszystkich niezbędnych części (po cenach dystrybutora - im będzie więcej chętnych tym lepiej) i każdemu zainteresowanemu zaprogramować za free procki! -
Pięknie się prezentuje ta stolarka w twoim wykonaniu Andrzej! Już można sobie wyobrazić wspaniały look klasycznej sylwetki tego modelu, no i waga jest jeszcze (póki co) rozsądna (ale już jakby nie chciała się "popsuć" ).
-
Choć bawię się ostatnio w lutowanie całkiem małych rzeczy, takich jak ten odbiornik DIY: ... o czym piszę w TYM wątku, jednak to co robisz Wojtek byłoby chyba nieee na moooje nerwy! (chociaż, kto wie? )
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
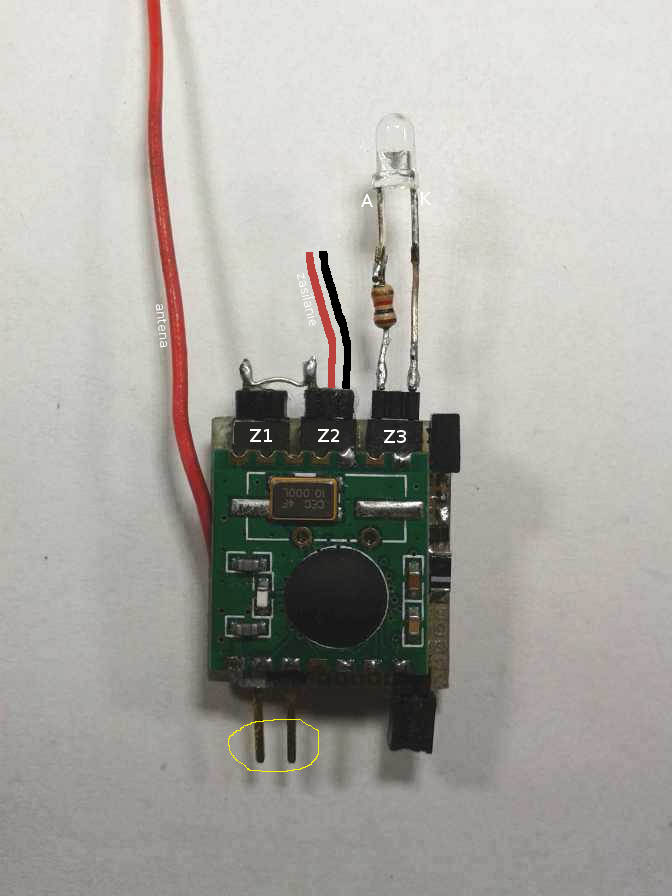
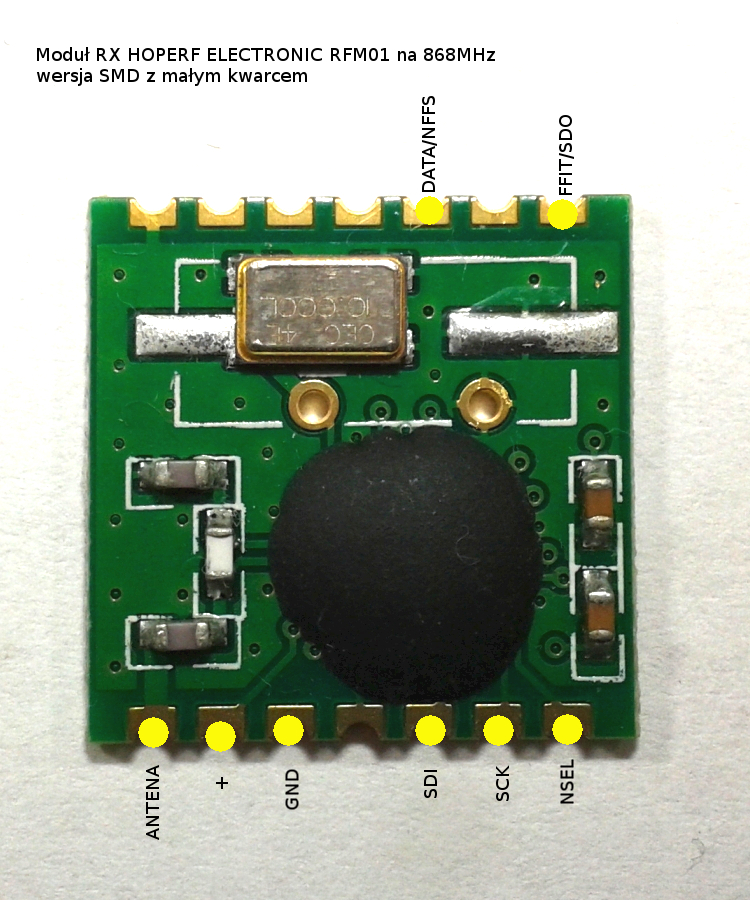
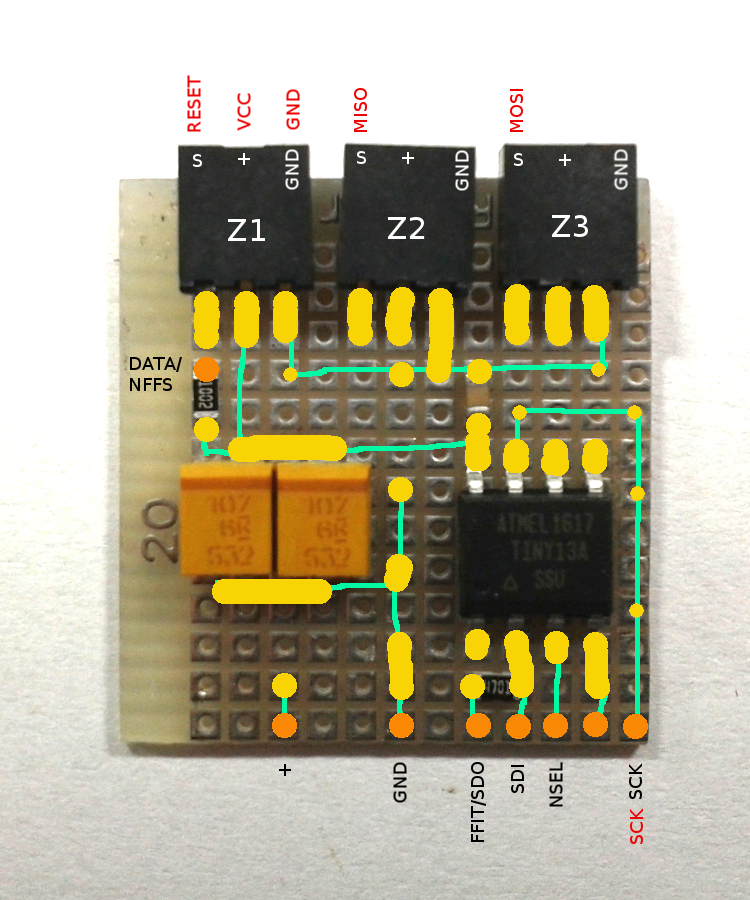
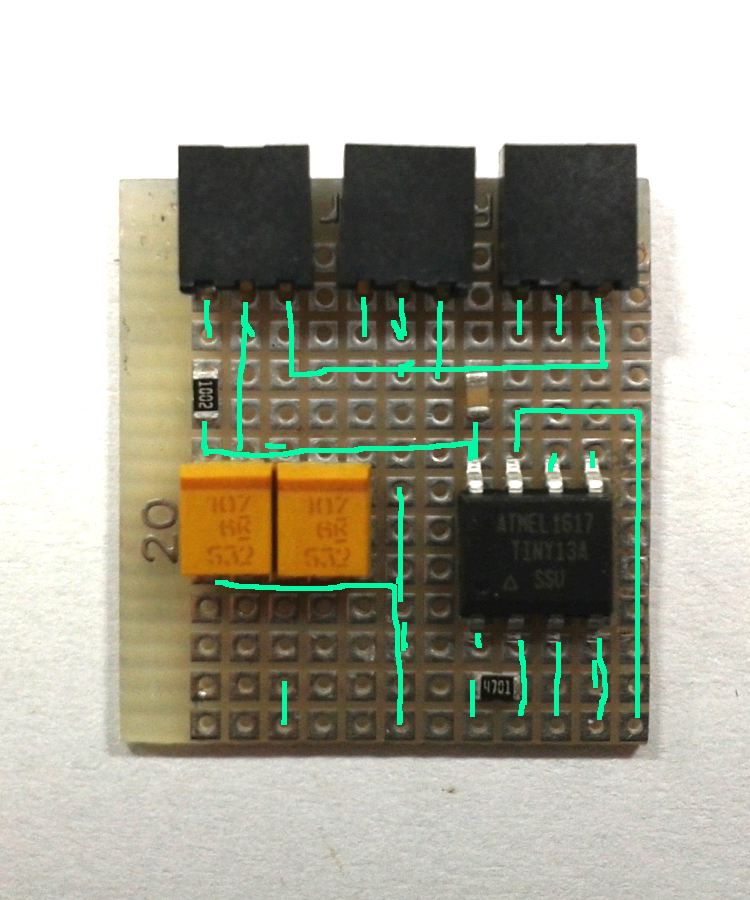
Jak bindujemy odbiornik, czyli parujemy z nadajnikiem? Sprawa jest prosta. Potrzebujemy zworkę z kawałka drutu oraz opcjonalnie diodę LED (czerwoną) z podłączonym do niej szeregowo rezystorem 1k, która zasygnalizuje nam zakończenie procesu parowania. Fizycznie wygląda to tak: W czasie bindowania zwora łączy sygnał "S" z gniazda Z1 z sygnałem "S" z gniazda Z2. Do gniazda Z3 można podłączyć diodę LED. Sygnał "S" z gniazda Z3 do rezystora 1k, rezystor szeregowo do anody diody LED (mała elektroda wewnątrz bańki diody świecącej), a katoda diody LED (duża elektroda w kształcie trójkąta wewnątrz bańki diody LED) do GND w gniazadku Z3. Na fotce widać moją pierwszą wersję odbiornika, która ma dodatkowe gniazdo zasilania (te dwa bolce obwiedzione na żółto). W drugiej wersji odbiornika jego zasilanie realizowane będzie tylko przez złącza "Z", więc żeby zasilanie odbiornika w trakcje bindowania, niezależnie od wersji, było uniwersalne, realizujemy je np. tym czerwono-czarnym kabelkiem w złączu Z2 (żyła czerwona: + zasilania, czarna: GND). Wszystkie elementy, potrzebne do bindowania możemy zapakować w rodzaj modułu (zalać żywicą, zakleić taśmą itd), tak aby można było wygodnie całość wtykać (za jednym zamachem) do gniazd "Z". Ja zrobiłem to tak (po najmniejszej linii oporu ): (na fotce moduł bindowania bez kabelka zasilającego dla wersji odbiornika z dodatkowym gniazdem zasilania) Procedura bindowania: 1/ Włączamy moduł bindowania w gniazda "Z". 2/ Włączamy zasilanie odbiornika. 3/ Włączamy zasilanie nadajnika z ustalonym wcześniej kanałem i trybem pracy aparatury (w tym czasie w zasięgu aparatury nie może znajdować się inny załączony nadajnik tego typu). Jak w nadajniku wybieramy kanał i tryb pracy podam przy opisie budowy nadajnika. Odbiornik skanuje pasmo i po znalezieniu wybranego kanału (jednego z 60 możliwych w paśmie 868-870MHz naszego nadajnika) zapisuje sobie te dane do pamięci EEPROM mikrokontrolera, łącznie z danymi co do wybranego jednego z czterech trybów pracy aparatury (dla wersji pierwszej odbiornika). Trwa to chwilkę (u mnie "na warsztacie" praktycznie ok pół sekundy), po czym zapala się dioda LED, sygnalizując zakończenie bindowania. Wyłączamy zasilanie odbiornika. Wyjmujemy moduł bindowania, włączamy wtyczki osprzętu (modelu) do gniazd "Z" i odbiornik mamy zestrojony z naszym nadajnikiem. Oczywiście procedurę bindowania powtarzamy tylko wtedy, gdy zajdzie konieczność zmiany kanału lub trybu pracy aparatury. UWAGA Jeśli mamy wykonany odbiornik w wersji drugiej, to dla poprawnego zbindowania z nadajnikiem, w nadajniku musi być wybrany tryb 2 pracy aparatury (TYLKO TAKI)! W drugiej wersji odbiornika (który realizuje tylko pracę V-tail serw) nie potrzebny jest zewnętrzny regulator obrotów silników DC (poza wzmacniaczem prądowym silnika, który opiszę niebawem), jak to ma miejsce przy pierwszej wersji odbiornika w trybie 2 (V-tail) pracy aparatury. Druga wersja odbiornika to opcja dla małych skrzydełek lub ornitopterów (np. TAKICH), napędzanych mikrosilnikami DC.
-
No tak, jakżeby tu nie rozpoznać kuzyna.
-
P-51D Mustang 1:96 RC electric 8ch - FILM Z LOTÓW!!!
ssuchy odpowiedział(a) na ssuchy temat w Mini i mikromodele
P-51 1/96 wykonany jest techniką skorupową z pianki Durobatic o grubości tylko 0,5 mm (3 arkusze 300x320 mm i grubości ok. 0,2 mm kosztują 20 dolców, a więc niemało i to nieaktywowana do wydruków!) , która mimo to posiada wyjątkową sztywność i zachowuje znacznie lepszą elastyczność do wyginania/kształtowania w porównaniu do typowego Depronu. Nadruki na tej piance robi się zwykłą drukarka atramentową (powierzchnia pianki musi być aktywowana pod plujkę), po czym elementy wycina, kształtuje i klei skorupy poszczególnych elementów poszycia na depronowych wręgach. Przykład podobnych planów P-51, które niegdyś były do pobrania ze strony Martina Newella, tylko modelu 2x większego: P-51_plans.pdf ... czyli takiego: a opis jest TUTAJ. ... i 18 fotek obrazujących szczegóły konstrukcji: P-51_foto_szczeg.zip PS Ciekawe, czy taka pianka jest gdzieś u nas dostępna - ze względu na cenę, pewnie NIE?
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Każda inwencja jest dobra o ile prowadzi do celu. Kolega Sławek (Rumcajs na forum alexrc i RC Club) przyjął inne rozwiązanie wykonania tej aparatury, bez mikropłytki uniwersalnej (fakt - nie jest dostępna wszędzie). ATTiny13A polutował "na pająka" z pozostałymi elementami (nie ma ich wiele, więc jest to jak najbardziej możliwe), zapakował w termokurczkę i przylutował do modułu RF: Sławek wykorzystuje inną wersję modułów radiowych do druku przewlekanego ze złączką, którą wylutował i w to miejsca zalutował kabelki. Moduły te mają co prawda nieznacznie mniejszą płytkę od wersji SMD, ale ja ich nie wykorzystałem w swoim rozwiązaniu, bo nie podobał mi się ten wielki kwarc-kartofel! Na fotce powyżej widoczna jest elektronika nadajnika - wyszła całkiem zgrabna konstrukcja. Ja nadajnika nie będę aż tak miniaturyzował jak Sławek, bo chcę wykorzystać akumulator 2S LiIon 2Ah, więc potrzebuję trochę większej obudowy. Planuję również umieścić wewnątrz obudowy nadajnika wzmacniacz RF i mikromoduł ładowarki do małych LiPoly, tak jak w oryginalnej aparaturze Plantraco: ... czyli takiej jaką wykorzystuje np. Martin Newell (tylko jego aparatura Plantraco z tego FILMU jest już mocno podrasowana ).
-
Szczenę mam od dawna głęboko w dole, więc nie wiem co jeszcze mógłbym napisać poza tym, że martwi mnie "tycie" tego malucha.
-
Rozumiem, że nad zespołem napędowym jeszcze dumasz (czy to jakaś tajemnica)?
-
Popatrzcie na TEN film. Nawet mewy się pomyliły. Konstrukcje Kazuhiko Kakuty są naprawdę niesamowite! Dla ciekawych specyfikacja tego modelu: width 127 cm length 57 cm weight 226 g battery Lipo 2cell 260mAh 17g and 2cell 330mAh 19g Total flight weight 262g Falcon52iV with Stabilizer Receiver: FrSky TFR6M 2.4Ghz 6CH Micro Receiver FASST Compatible Servo: Vtail: elevator & rudder (D56MG servo *2) Motor: C20 brushless Outrunner 2050kv ESC: H-KING 12A Fixed Wing Brushless Speed Controller Gear: Main gear: 66T48P Acetal (Aluminun shaft 1/4inch, ID 1/4inch ball bearing), First gear: 66TM0.4 GWS EPS D, 48P7TPinionWire(with 3/16inch ball bearing), Pinion Gear 48P16T Battery: Lipo 2cell 260mAh 17g and 2cell 330mAh 19g Film of a wing Orcofilm EN158C Control: 3CH (a motor, inverted Vtail: 2 servo) Gliding system non Stabilizer GuardianTM 2D/3D Inertial Stabilizer
-
No, miodzio, ten kołpaczek (i reszta)! Napisz dokładnie jak to razem ze śmigłem mocujesz do tej cienkiej osi napędowej? Sam niebawem stanę przed podobnym dylematem. PS Klapka to pewnie mocowana na małe neodymki, czy jakieś tradycyjne zaczepy?
-
Nie ma początku, bo się zwinął w kulkę.
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Mały eksperyment, pokazujący jak opisywana tutaj aparatura, dedykowana dla minimodeli radzi sobie z obsługą osprzętu dla modeli skali makro (w teście bierze udział pierwszy odbiornik, bo drugi jeszcze nie skończony, nadajnik, który niebawem będę opisywał szczegółowo też jest póki co rozbebeszony, jak widać na filmie): PG1 test 6 - regulacja obrotów bezszczotkowca z reglerem (ZTW BEATLES 30A BEC) i sterowanie dwoma serwami 9 gramowymi, które pracują w trybie V-tail (pierwsza wersja aparatury - Tryb 2 - opcja dla skrzydełek lub ornitopterów np. TAKICH) ... jak widać aparatura radzi sobie z tym dobrze, choć ten odbiornik "mikrus" śmiesznie wygląda przy klamotach do trochę większych modeli (dla porównania wielkości przy aku 1800mAh leży po lewej stronie mały aku 150mAh ). PS Aparaturę nazwałem PG1 na cześć autora projektu (inicjały imienia i nazwiska). -
No, po prostu piknie (jak zwykle zresztą), co tu dużo gadać. Łokropnie jestem ciekaw w jakiej wadze się zamkniesz ostatecznie, bo Sopwith Wojtka zaczyna powoli "tyć" , ale tam są trzy skrzydełka więc może da radę.
-
A mnie się koła białe bardziej podobają (zresztą są już chyba gotowe), więc wersja 15 . Tak sobie tylko myślę, czy on nie wyjdzie za ciężki?
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Uzyskałem zgodę od autora projektu na umieszczenie plików hex na forum modelarskim, niezbędnych do zaprogramowania ATTiny13A. Skoro zacząłem od odbiornika to teraz umieszczę wsady tylko do niego, co zapobiegnie ewentualnym pomyłkom (plik do nadajnika zapodam przy jego opisie - jest tylko jeden dla obu wersji aparatury). Trochę to od d..y strony, ale lepiej wziąć byka od razu za rogi, bo elektronika nadajnika to będzie już małe piwko (zmontowany na typowych płytkach uniwersalnych z rastrem 2,54mm). Plik hex do odbiornika - pierwsza wersja aparatury (cztery tryby pracy): odbiornik1.zip Plik hex do odbiornika - druga wersja aparatury (skrzydełka, ornitoptery): odbiornik2.zip Fuse Low Byte = 0x3A, Fuse High Byte = 0xFA AVR Fuse Calculator - można skorzystać z tego kalkulatora, żeby w razie potrzeby przedstawić sobie fuski do zaznaczenia w programatorze w innej postaci (np. graficznej - nakładkowej na avrdude). Pierwszy odbiornik zaprogramowałem sobie do pierwszej wersji aparatury (jego test widać na dwóch pierwszych filmikach), a ten montowany aktualnie na czysto będzie pracował w drugiej wersji aparatury (wcześniej testowałem drugą wersję z powodzeniem na polu stykowym, co widać na filmie z ostatniego linka - filmy są w pierwszym poście). BARDZO WAŻNA UWAGA Najpierw programujemy Flash mikrokontrolera ATTiny13A (zapisując do tej pamięci plik hex programu), a dopiero potem programujemy Fusebits, bo mamy tylko jedno podejście. Po zaprogramowaniu Fusebits pin 1 - RESET mikrokontrolera zamienia się w zwykły port komunikacyjny i mikrokontroler zostaje zablokowany dla naszego standardowego programatora szeregowego. Potrzeba zablokowania wynika z tego, że wszystkie sześć pinów mikrokontrolera są wykorzystane w projekcie jako porty komunikacyjne z resztą układu. W związku z powyższym, powtarzam: najpierw programujemy pamięć z programem, weryfikujemy - sprawdzając czy wszystko ok, a dopiero na końcu programujemy fuski. -
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
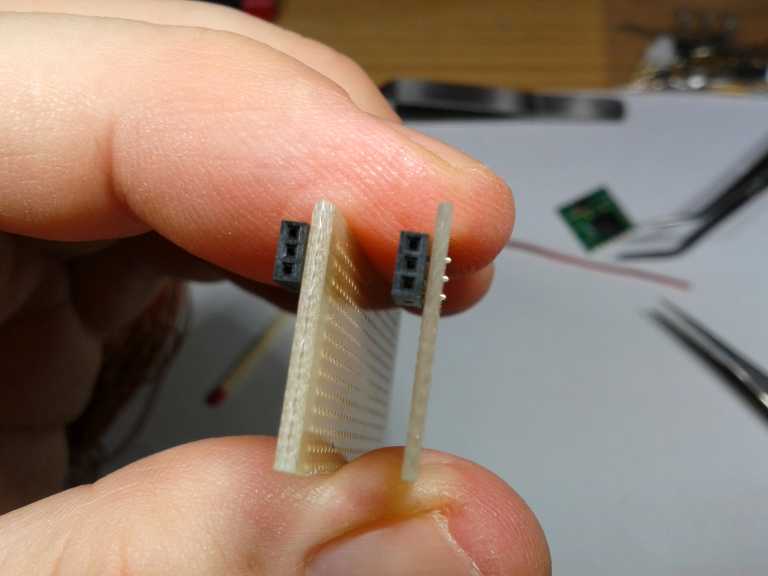
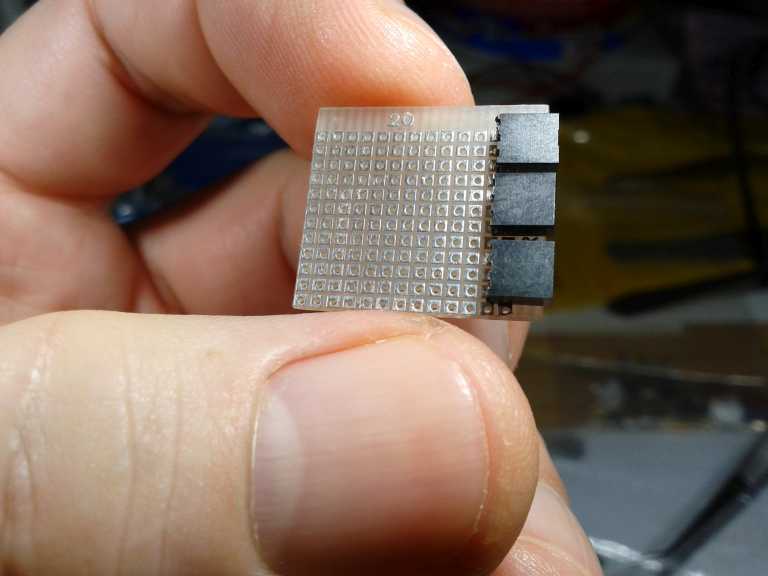
UWAGA 1 Jeżeli ktoś już ściągnął sobie fotki z opisami, to proszę teraz zrobić aktualizację, bo właśnie poprawiłem istotne mijaki. UWAGA 2 Nie dotyczy osób, które będą korzystały z oryginalnej mikropłytki uniwersalnej RE012-LF (ROTH ELEKTRONIK GMBH) lub podobnej o standardowej grubości 1,5mm i nie będą jej odchudzały, poprzez zeszlifowanie do mniejszej grubości (zadowolą się wagą odbiornika ok 3g). W odbiorniku używam mikrozłącz f-my CONNFLY DS1065-01-1X3S8BV. Jest to gniazdo 3-pinowe z wyprowadzeniami prostymi i rastrem 1,27mm. Oczywiście nic nie stoi na przeszkodzie żeby użyć innych mikrozłącz 1,27mm (pasujących do płytki uniwersalnej), nawet takich, jakie są używane oryginalnie w mikroserwach, pod warunkiem, że uda się je kupić gdzieś w rozsądnej ilości . Dystrybutor u którego kupowałem wszystkie elementy do projektu nie miał akurat na stanie kątowych złącz tego typu - chciałem aby w odbiorniku wtyki serw włączane były równolegle do płytki, a nie prostopadle, jak to jest praktycznie we wszystkich odbiornikach fabrycznych. Dlatego w tych gniazdach prostych pozaginałem końcówki (są płaskie i z zaginaniem nie ma problemu - nie wyłamią się). Tak zmodyfikowane gniazda z prostych na kątowe nie przechodzą na wylot w płytce o grubości 1,5mm (końcówki złącz prostych są krótsze od tych w złączach kątowych). Lutujemy gniazda i tak od wierzchu, więc to nie kłopot, a nawet dobrze przy prowadzeniu krosów od spodu gołym kynarem, przewlekanym przez otwory do wierzchu płytki (to te łukowate zwory na pinach zasilania w gniazdach). Jednak jeżeli płytkę zeszlifujemy, to piny gniazd przechodzą na wylot, co widać na poniższej fotce: ... i wtedy lepiej polutować te gołe, łukowate krosy pod spodem do wystających pinów gniazd, ewentualnie jeśli chcemy się trzymać pierwszej wersji z lutowaniem wszystkiego po wierzchu czyli przewlekaniem krosów przez otwory w płytce, to łukowate krosy pod spodem lepiej jest puścić kynarem w izolacji. Mikropłytka ma otwory o średnicy 0,5mm, więc przez otwór przechodzą dwa druty gołego kynara - przewlekanie krosów tak sobie przemyślcie, żeby to uwzględnić. Ja na początku kilka razy bawiłem się w docinanie drutów., dopóki sobie tego nie uświadomiłem. UWAGA 3 Że płytka odbiornika jest niewielka (niewiele większa od paznokcia na kciuku), to widać na poniższej fotce: ... więc do lutowania trzeba używać cienkich grotów, ale zaraz nie musi to być nie wiadomo jak wypasiony sprzęt lutowniczy. Ja tam używam dobrej krajowej transformatorówki i daję radę. Tylko groty do SMD robię z miedzianego drutu srebrzonego fi 0,5 mm i po ukształtowaniu końcówki lekko ją jeszcze rozklepuję i szlifuję iglakiem.
-
Jakoś nie zauważyłem tego tematu, dlatego pisałem o tym TUTAJ. Nikt o tym nie wspomniał, że autorem tego niezwykłego malucha jest Martin Newell (strona web: Martins Flying Machines), jeden z nagradzanych w ostatnich latach mistrzów współczesnego mikromodelarstwa lotniczego R/C (nie mylić z balsowymi patyczakami, krytymi "filmem" z napędem gumowym). Martin do sterowania swoich maluchów stosuje nadajnik f-my Plantraco (zmodyfikowany przez niego i pokazany w 4 minucie 35 sekundzie TEGO filmu), pracujący w paśmie 900 MHz, więc dla ścisłości nie używa mikroodbiorników z podanego wyżej linku f-my Deltang (bo te są na 2,4GHz, kodowanie DSM). Odbiornik, jaki wykorzystał w tym mikro Mustangu to jest: Hip Hop II Rabbit: o wymiarach 5 x 5 x 2,5 mm i wadze 115 mg !!! (takiego samego używa również w modelu .Odbiornik ten został zmodyfikowany przez Martina z 4 do 8-miu kanałów, oraz została dobudowana 3-osiowa stabilizacja żyroskopowa!!! W swoich mikromodelach nie używa również serwomechanizmów (o co się pyta juser jaciomp), bo jeszcze nikt takich małych nie produkuje. Stosuje obrotowe siłowniki magnetyczne (actuators), tak jak wspomnieli o tym juserzy Masło i Xeo (przy czym sterowanie takich siłowników odbywa się podobnie jak nawrotna - ze zmianą kierunku obrotów - regulacja PWM silnika DC): Jak wszyscy jestem w szoku (nadal) i chyba śmiało można powiedzieć, że jak zwykle jesteśmy "100 lat za Zulusami", ale chyba tylko dla tego, że nie ma u nas w kraju (jak dotąd ) mody na tego typu mikromodelarstwo. P-51 Mustang, 8 Channel Radio 1:96 Scale, 4.6” Wingspan - opis modelu, plik .pdf
-
... ale buty, to będzie musiał wywalić do kosza.
-
No to wydrukuj jeszcze obły kokpit i pustą wewnątrz kukłę Sean'a Connery i będzie git (na drukarce 3D chyba da się, tylko pewnie trzeba użyć jakiegoś programu typu ART. a nie CAD). Stateczniki, tak na moją intuicję powinny być chyba większe, bo nie ma tu żadnych innych płaskich powierzchni i ze statecznością może być różnie, ale też zależy to od wielkości i szybkości lotu modelu. Ciekawy pomysł Adam.
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
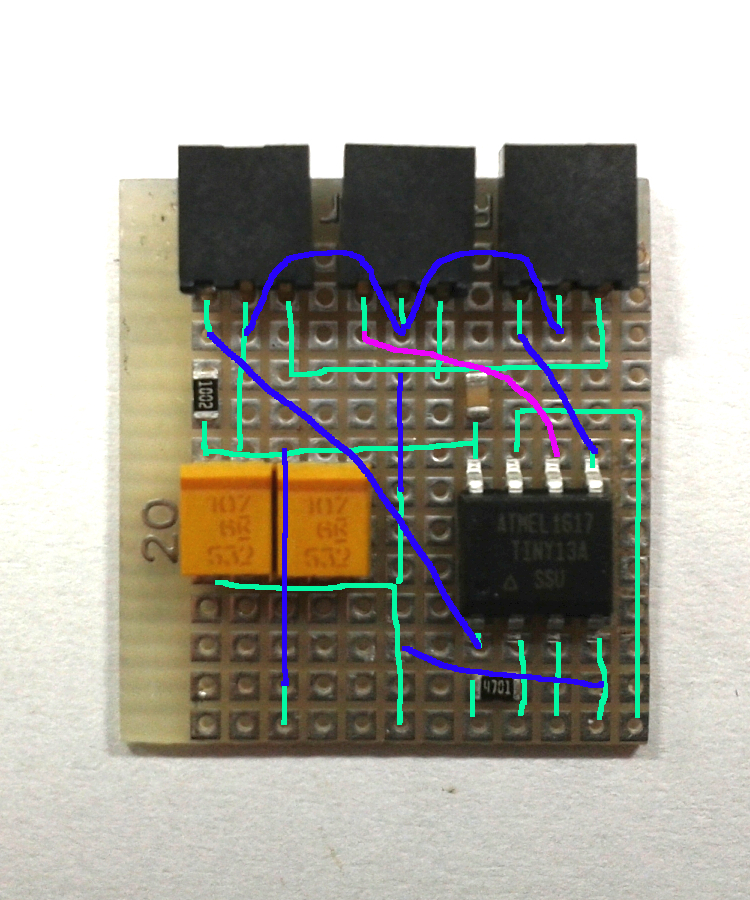
Szczegóły budowy odbiornika (płytka na fotkach powiększona 8x). Schemat opracowany przez kol. Piotra: Uwagi do schematu: - diody D1 i kondensatora C3 nie stosowałem, - kondensator ceramiczny C1 zamontować blisko nogi zasilającej uPc. - w miejsce C2 użyłem kondensatora tantalowego 2 x 100uF/6,3V typ B (taki zespół jest lżejszy od jednego 220uF/6,3 typ C). Wersja montażu: V1 Opis elementów: Krosy wykonane kynarem 0,25 (ze zdjętą izolacją teflonową) po wierzchu (na warstwie miedziowanych padów lutowniczych) zaznaczyłem na zielono, a na spodniej stronie przeciągnięte przez otwory na niebiesko. W jednym miejscu pod spodem kros zrobiony jest kynarem w izolacji, który wyróżniłem na fioletowo. Do lutowania używamy koniecznie cieniutkiego tinolu np. 0,38mm Sn60Pb40 (grubą "pałą" nie da się tego zrobić ), oraz topnika do SMD np. RF800. Ze względu na to, że złącza Z są lutowane po stronie miedzi, należy przed przylutowaniem przykleić każde delikatnie (żeby nie zalać wykorzystywanych padów lutowniczych), odrobiną CA do płytki: Miejsca lutowania maznąłem na żółto (bez widoku dolnych krosów, żeby nie zaciemniały detali), na pomarańczowo punkty lutowania przewodów do RX-a, a na czerwono opisałem gdzie podłączyć sygnały do złącza ISP KANDA programatora AVR aby po zmontowaniu płytki zaprogramować Flash i Fuse Bits mikrontrolera ATTiny13A: ... no i jak podlutować RX-a: Pierwszy kompletny odbiornik wyglądał tak po zmontowaniu (miał kilka dodatkowych elementów do testów): ... i ważył: Drugi będzie już odchudzony. Napięcie zasilania odbiornika może być z zakresu 2,5 - 5V, a więc nadaje się do zasilania w małych modelach z LiPo 1S (tylko serwa muszą być dobrane do pracy przy niskich napięciach, bo nie wszystkie z tym sobie dobrze radzą). Koszt elementów na jeden odbiornik łącznie z modułem RX wyniósł mnie: ok. 25 PLN. To mniej więcej wychodzi połowę ceny gotowych i najtańszych mikroodbiorników, dedykowanych do konkretnych aparatur, dostępnych w handlu. PS Opis nadajnika podam również w taki "łopatologiczny" sposób, tak, żeby każdy zainteresowany mógł sobie poradzić ze zmontowaniem tegoż. W razie czego pytać, gdyby były jakieś niejasności.
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Koledzy, odpowiem ogólnie na wasze pytania. Chcę sobie na początek, po długiej przerwie zrobić od A do Z komplet prostej i niedrogiej aparatury R/C do minilatania, czyli do sterowania małymi modelami, które będą się nadawały do działu: Mini mikromodele - takie są moje obecne preferencje po powrocie do hobby. Więc jeśli ktoś przy okazji skorzysta z tych moich wypocin, to będę tym bardziej kontent z takiego obrotu sprawy. Ta aparatura docelowo ma być podobna do oryginalnej aparatury f-my Plantraco, używanej do kierowania małymi modelami i pracującej na podobnej częstotliwości (dopuszczonej w USA: 900MHz). Dlatego nie mam na razie parcia na uzyskanie nie wiadomo jakich zasięgów (dla "maluchów" nie jest to konieczne), czy wykorzystywanie (póki co) innych pasm RF, niż użyte oryginalnie w tym gotowcu pasmo 868MHz.Ta aparatura raczej nie nadaje się do modeli w skali makro, bo oryginalny, fabryczny moduł TX-a w niej użyty ma za małą moc RF, a tylko 3 kanały proporcjonalne to trochę skromnie rzecz jasna, choć pewnie dałoby się sterować i jakimś większym modelem typu: prosty szybowiec, skrzydełko z napędem, czy model nieskomplikowanego trenerka do pierwszych lotów, jak np. Wicherek bez lotek, jednak pod warunkiem dorobienie do fabrycznego modułu TX-a tej aparatury jakiegoś niewielkiego wzmacniacza RF, tak żeby zapewnić właściwy zasięg przy sterowaniu większym modelem (mam to w planach, bo sam jeszcze nie wiem jak wypadną praktycznie testy zasięgu apki w terenie przy spasowanych antenach). Elektronika nadajnika i odbiornika nie jest mojego projektu, dostosowuję ją tylko do własnych potrzeb, budując kompletną aparaturę R/C, taką, jaka mi będzie potrzebna (na początek) do sterowania modelami samolotów, konwertolotów (same helikoptery i wielorotory zwane popularnie "dronami" mnie nie interesują), ornitopterów i hybrydowych modeli na uwięzi z napędem elektrycznym - wszystko w skali mini/mikro. Jeśli chodzi o elektronikę nadajnika i odbiornika to korzystam ze sprawdzonego gotowca (choć było z nim trochę różnych problemów, jakich - czytać TUTAJ), bo ma być prosto, łatwo i przyjemni (bez rozbuchanych projektów jak na początek). Autor udostępnił tylko "wsady" do procka (pliki hex wynikowe po kompilacji), więc wiele zmienić się tu nie da bez ingerencji samego autora projektu. Kolega Piotr (autor projektu) jest osobą niezwykle spolegliwą i udało mi się namówić go do poprawek (mimo, że jest zajęty - pracuje przy rozbudowanym projekcie innej aparatury R/C z dodatkowymi bajerami), dzięki czemu powstał jeszcze jeden tryb pracy: 2' (opis patrz niżej) - będzie idealny do sterowania mikroskrzydełek i mikroornitopterów (z napędem DC), które są w zasięgu moich obecnych zainteresowań. Jeśli chodzi o zaprojektowanie dedykowanego PCB, to jak ktoś ma ochotę do współpracy to nie ma sprawy, zapraszam, ale to dopiero po praktycznym sprawdzeniu apki w modelach (i może przy jakimś większym zainteresowaniu tym tematem), bo na chwilę obecną chyba nie ma to sensu, skoro na razie można bez problemu zmontować w małych rozmiarach odbiorniki do testów na mikropłytkach uniwersalnych. Wymaga to co prawda trochę więcej lutowania, bo trzeba zrobić na uniwersalce dodatkowe "krosy" kynarem, ale "nie taki diabeł straszny jak go malują". Aparatura ma być "budżetowa", więc na początek przy pierwszych testach jako gimbale wykorzystałem gamepady z odzysku (tak jak to pokazałem na filmikach z powyższych linków). Co prawda ich mankament, to brak trymerów mechanicznych (aparatura ze względu na swoja prostotę i jedynie 1KB Flasha w tanim tylko 8-mio nogowym procku ATTiny13 nie ma również trymerów cyfrowych), zobaczymy jak to wypadnie "w praniu". Dla tych co nie mieli czasu wczytywać się w linki, podaję jakie możliwości ma ta prosta aparatura R/C. W pierwszej wersji odbiornika ma cztery tryby pracy lub w drugiej wersji odbiornika jeden tryb dodatkowy (po poprawce, zrobionej przez autora na moje życzenie). Pierwsza wersja aparatury (plik dla zaprogramowania uP odbiornika: odbiornik1.hex - patrz dalej) - Tryb 1 (standardowy) 3 kanały obsługują 3 serwa - Tryb 2 1 kanał obsługuje serwo, 2 pozostałe kanały obsługują 2 serwa pracujące jako V-tail - Tryb 3 1 kanał obsługuje serwo, 2 pozostałe kanały obsługują niezależną regulację PWM obrotów dwóch silników DC - Tryb 4 1 kanał obsługuje serwo, 2 pozostałe kanały obsługują poprzez mostek pradowy H nawrotną regulację PWM obrotów jednego silnika DC, (opcja dla modeli kołowych i pływających), lub siłownika modelarskiego (actuator R/C) lub Druga wersja aparatury (plik dla zaprogramowania uP odbiornika: odbiornik2.hex - patrz dalej) - Tryb 2' 2 pierwsze kanały obsługują 2 serwa jako V-tail, 1 kanał regulacja PWM obrotów silnika DC (jako, że jest to późniejsza poprawka nie związana ze wstępnym projektem to po zaprogramowaniu programatorem mikrokontrolera odbiornika innym wsadem dla trybu 2' nie działają pozostałe tryby 1-4) - aparatura ma możliwość (aczkolwiek uproszczoną, bez sprawdzenia jaki konkretnie kanał wybraliśmy - w nadajniku nie ma wyświetlacza) intuicyjnego wyboru jednego z 60 subkanałów z pasma 868MHz, tak aby pobliskie nadajniki wielu modelarzy nie zakłócały się nawzajem - dzięki temu aparatura powinna nadawać się np. do latania grupowo na hali. Biorąc pod uwagę fakt, że w projekcie (zarówno w nadajniku jak i odbiorniku) wykorzystano tani mikrokontroler ATTiny13, trzeba stwierdzić, że kolega Piotr wykonał kawał dobrej roboty upychając to wszystko w 1KB pamięci Flash. -
No kto ma parcie do lutowania i ręce jeszcze "nielatające" , to może sobie polutować samodzielnie aparaturkę R/C dedykowaną do prostych minimodeli. TUTAJ moje wypociny. Fajnie, że przybywa pasjonatów maluchów spośród zaawansowanych modelarzy praktyków.
-
TUTAJ (w dziale z elektroniką) opisuję budowę prostej i niedrogiej aparatury R/C do sterowania minimodeli.