ssuchy
-
Postów
1 112 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
14
Treść opublikowana przez ssuchy
-

Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Dla uspokojenia zainteresowanych wyjaśniam, że temat nie umarł: chwilowo pracuję przy elektronice do pilota IR (modele halowe na uwięzi) i jak skończę to niebawem dalszy ciąg szczegółowego opisu budowy nadajnika, który będzie mógł być wykorzystany: - dla modeli R/C w wersjach mini (przede wszystkim), - dla modeli hybrydowych C/L na uwięzi typu mono line, których idee wyjaśniam TUTAJ, - dla modeli ze sterowaniem klasycznym C/L (aparatura R/C steruje przepustnicą silnika i ewentualnymi dodatkowymi funkcjami w modelu) Po skończeniu opisu pilota IR i aparatury R/C zamierzam zorganizować dla chętnych i będę pilotował zbiorcze zamówienie elementów (po cenach dystrybutora) do budowy obu urządzeń. Dodatkowo wszystkim zainteresowanym do wzięcia udziału w zbiorczym zamówieniu zaprogramuję za free mikrokontrolery do aparatury R/C. Przykładowa cena za moduł RX do odbiornika: TUTAJ i jak widać warto się zmobilizować, żeby uzyskać niższe ceny. Zresztą zbiorcze zamówienie jest nawet wskazane, bo po co komu 100 szt. jednej wartości z elementów R, C? W detalu, w ilościach sztukowych raczej ciężko kupić gabaryt SMD 0603. PS Dla zainteresowanych odpowiadam, że nadajnik i odbiornik aparatury RC pracują przy zasilaniu LiPo 1S. Problem jest tylko z serwami, które nie zawsze chcą poprawnie pracować przy niskich napięciach, co wynika z ich konstrukcji i użytych tam układów scalonych, a ściślej z przyjętych niegdyś norm zasilania dla tychże, takich jakie dawały ówczesne możliwości elektroniki (co nam teraz rzecz jasna nie za bardzo pasuje) - trzeba je selekcjonować z dostępnych na rynku, lub stosować serwa dedykowane dla 1S. Z tego względu na pfmrc poruszę również (praktycznie) temat actuatorów (siłowników magnetycznych dla mini/ mikro) i mikrokonwerterów servo-actuator w zastosowaniu do małych modeli latających, no może nie aż takich małych jak TEN, bo to już wyższa szkoła jazdy (model o wadze 3g ma osiem kanałów i wbudowany żyroskop 3-osiowy - kto jeszcze nie oglądał, polecam)! -
Tylko mi tu Andrzej nie "wymiękaj"! Prace projektowo - testowe przy pilocie IR zakończone. Układ jest jeszcze na płytkach stykowych, ale mam już wszystkie elementy w wersji SMD. Trochę czasu zajęło mi jednak przejście od teorii do realu (zawsze trzeba powalczyć z jakimiś zakłóceniami - człowiek "wychodzi" z praktyki, jak robi sobie dłuższą przerwę ), ale dla mnie to przedsmak tego co mam w planach (ale to już w oparciu o mikrokontrolery, a nie "sztywną" logikę). Pozostała do zrobienia miniaturyzacja - całość trzeba polutować na mikropłytce do prototypowania SMD, tak żeby było małe i lekkie. Teraz przerwa świąteczna, a po świętach będę kończył (może w między czasie wrzucę filmiki obrazujące jak pilocikiem fajnie się włącza/wyłącza - kiedy chcesz, a nie tak jak TYM - silniki szczotkowe DC i bezszczotkowe z regulatorem - do halówek na uwięzi powinno być GIT) - no więc chwilkę musisz jeszcze poczekać na prototyp. Układ jest prosty, oparty o popularne elementy dostępne na rynku, więc każdy, kto da radę polutować SMD na mikropłytce, może w razie czego takie "coś" sobie zmajstrować (nie trzeba nic programować, w nadajniku-pilocie: 4093 DIP14, a w odbiorniku: 4013 SOP14 i 555 SOP8) . Elementy R i C (SMD 0603 ostatecznie 0805) starałem się tak dobrać, aby było małe ich zróżnicowanie, co powinno ułatwić nabycie takowych w wersji SMD (wszytko można kupić u jednego dystrybutora - za jakiś czas, jak już skończę opis pilota IR oraz aparatury RC zorganizuję zbiorczą wysyłkę dla chętnych, tak żeby zainteresowani mogli skorzystać z niższych cen w porównaniu do tych w detalu).
-
Andrzej, sprawdziłem PCB od serwa - do naszych celów (sterowanie obrotami silnika napędowego modelu latającego, gdzie musimy uzyskać pełną moc na silniku) nie nadaje się bez mocnego w tym grzebania Można co najwyżej zrobić z tego prosty switch, ewentualnie pseudo-regulację silniczków do zabawek kołowych, czy pływających. Na pewno jeszcze popracuję przy prostych reglach dla motorków DC, ale najpierw muszę skończyć pilota IR (powstaje ciekawe urządzenie: 3 in 1).
-
W tej chwili sprawdzam jeszcze opcję testera serwomechanizmów (regulatorów), a więc najprawdopodobniej będzie urządzenie 3 in 1: 1/ pilot IR (do modeli elektryków C/L): ON/OFF mikrosilników szczotkowych (max 2S/8A) i bezszczotkowych (z dodatkowym regulatorem z BEC), 2/ timer (do modeli elektryków F/F lub C/L): ON/OFF-po zadanym czasie, motorki j.w., 3/ tester serwomechanizmów i regulatorów (prosta kontrola sprawności). Będą wszystkie opcje jak wyżej, jeśli zmieszczę się z tym na małej płytce prototypowej do SMD (tak żeby było "zgrabne" i lekkie, bo to podstawa). PS Jak skończę urządzenie z sukcesem, przynajmniej mnie zadowalającym, to pewnie opiszę układ gdzieś w dziale z elektroniką, o ile jeszcze będę miał wenę. (EDIT: 8-04-2017) Testy sterowania mikromotorkami DC i silnikami bezszczotkowymi wypadły pomyślnie. Co prawda nie miałem zupełnie małych bezszczotkowców i bawiłem się takim o ciągu 800g z regulatorem 30A (bo taki miałem) - no to już byłby ciut większy elektryk C/L - nie mikrus na pewno no i wszystko było OK, więc z maluchami brushless nie powinno być tym bardziej problemów. Teraz siedzę przy bloku timera.
-
Daj znać wcześniej kiedy będziesz latał, to chętnie popatrzę.
-
Dogodnych dojść do wody nie brakuje nad naszym zalewem, praktycznie z każdej strony. Tyle, że latem w sezonie (szczególnie w weekendy) mnóstwo ludzisków wszędzie się tam kręci i zalega na słońcu w skupiskach (zwłaszcza w pobliżu ośrodków Marina i Dąbrowa oraz po drugiej stronie zalewu za Zemborzycami przy lesie). Sporo jest również obiektów pływających na wodzie, no i działa wówczas letni posterunek policji wodnej. , a zimą, w porównaniu z latem to spokój i cisza.
-
Kurde, aż szkoda go wypuszczać. Dorobić atrapę silnika i śmigło z epoki (bo to co widać to niezły dysonans z resztą konstrukcji ) i powiesić pod sufitem, żeby cieszył oko.
-
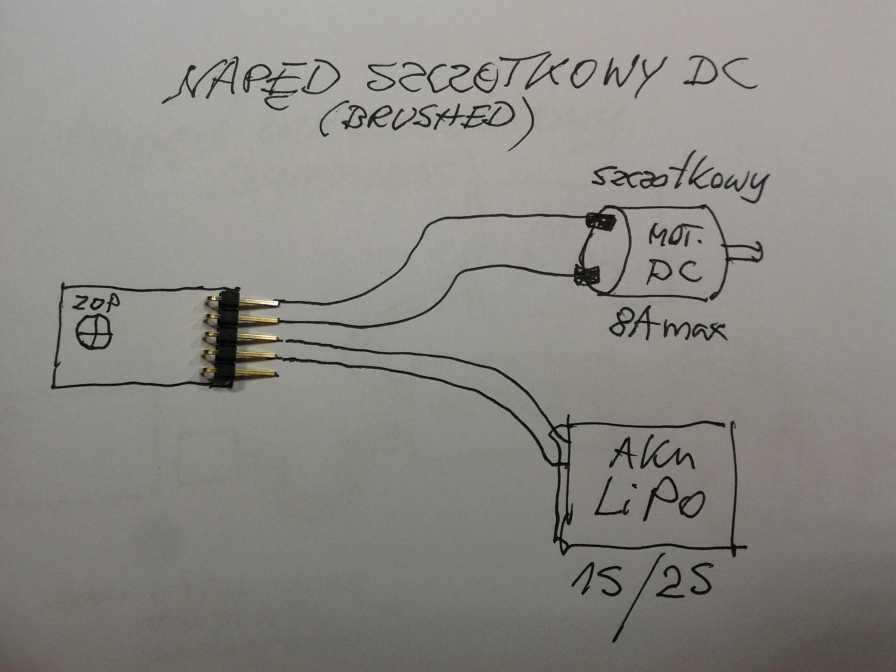
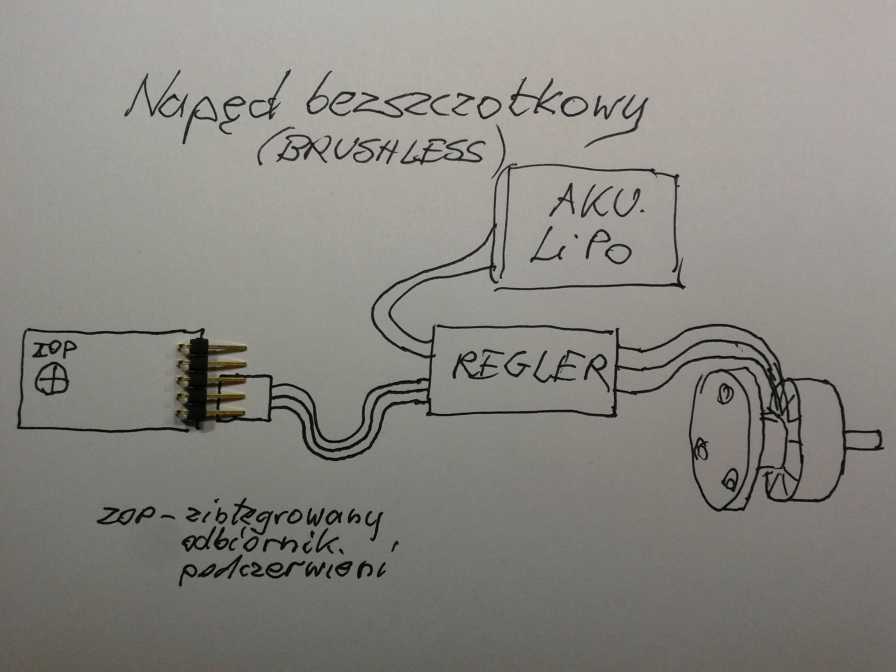
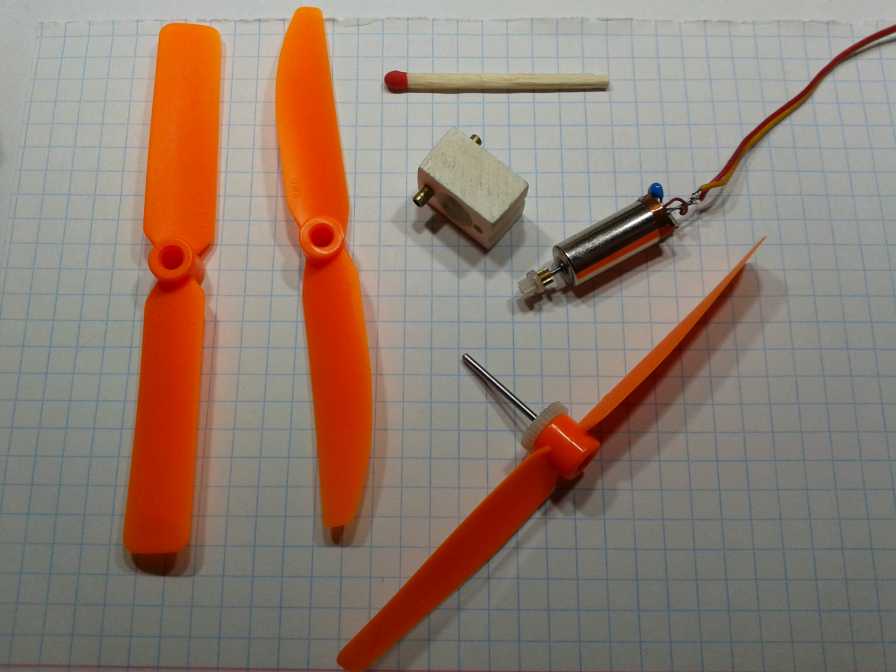
Do silnika też będziesz potrzebował żeńskie konektory, a nie męskie (jak na powyższym foto). Poniższe rysunki (czytaj: mazanki ) wyjaśniają dlaczego. W przypadku bezszczotkowca podepniesz dowolny zestaw z regulatorem (z BECem) już bez żadnych kombinacji, a nóż zechcesz się później pobawić w ciut większego elektryka - uwięziowca halowego, jak np. TEN (nie ma startu na filmie - pewnie ktoś mu wypuszczał model po włączeniu silnika, on latał do wyczerpania małego akusa, ale czegoś takiego fajnego jak ty będziesz testował, na pewno nie miał ) Podzielimy się eksperymentami z nowożytnymi modelami C/L (nostalgiczny powrót do przeszłości w nowym stylu), ty bawiąc się torem optycznym w mikrusach, ja poprzecieram szlaki z torem radiowym w modelach elektryków C/L (nowej generacji ) w temacie pod roboczym tytułem: "Chimera", czyli hybryda na uwięzi (ale temat postawię, jak już będę miał co pokazać, czyli za jakiś czas i gwarantuję, że będzie ciekawie ). Na razie muszę skończyć kilka napoczętych już projektów elektronicznych, związanych z modelarstwem. PS Data: 04-04-2017 - tytuł tematu: "Chimera", czyli hybryda na uwięzi - ZAREZERWOWANY i nie ważyć mi się go ruszać.

-
Andrzej, aku umieść z drugiej strony, bo tu gdzie jest teraz będzie wyłącznik optyczny. Jakie masz złączki przy aku założone?
-
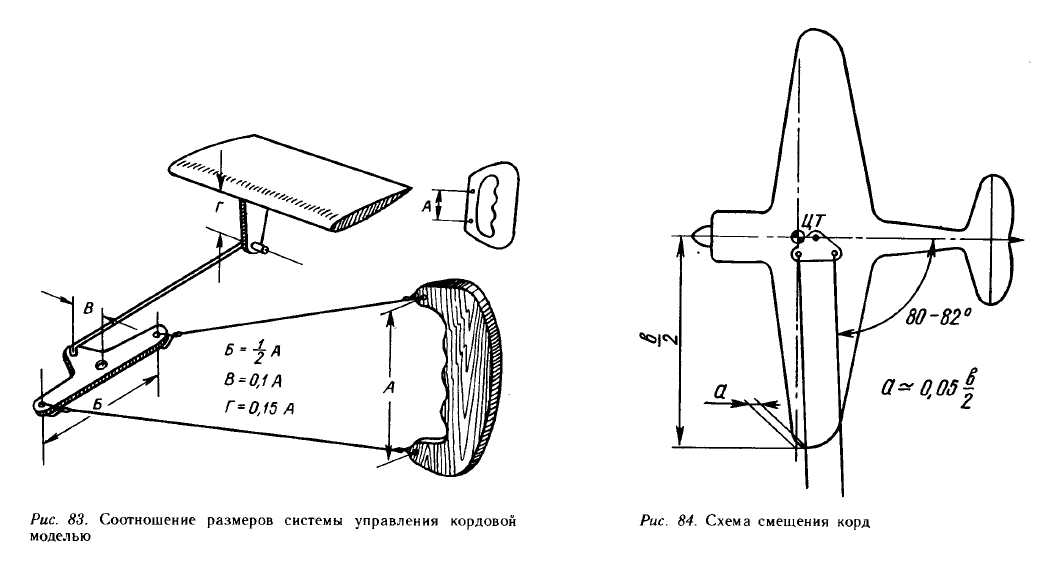
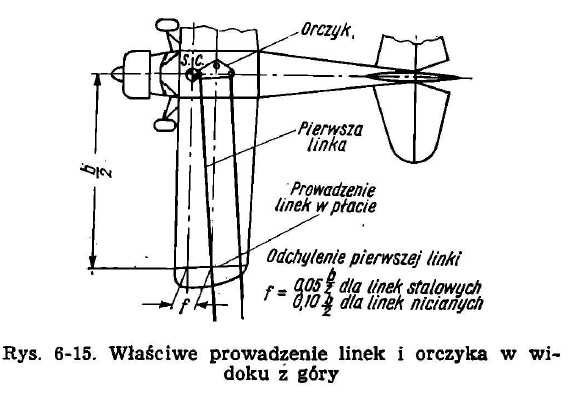
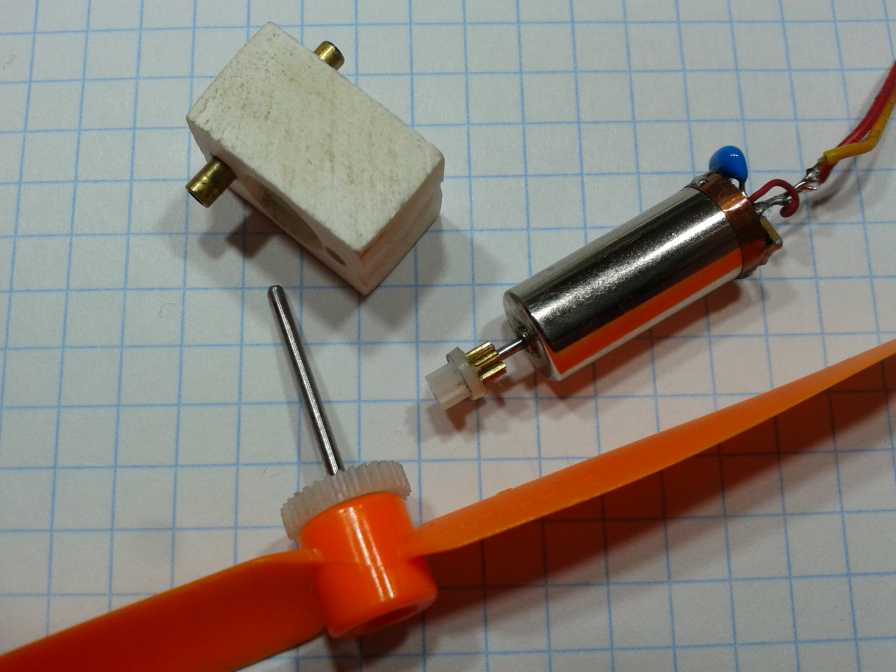
To co najważniejsze: "Modeli kopii samolietow" B. W. Taradiejew 1990 ... i dokładniejsza wiedza od nieodżałowanego Papy Schiera ("Miniaturowe lotnictwo"): Wersja C będzie odpowiednia z tym, że jak widać z rysunków, orczyk zamontowany w modelu za środkiem ciężkości, a resztę wyliczysz. Obawiam się jednak, że ani Taradiejew, ani Schier nie sprawdzali tego w takich małych modelach. Będziesz Andrzej pierwszy zapewne. Modelik fajny i zgrabny (mam nadzieję, że posadziłeś tam Ważniaka , który jak widać mocno się już wkurzył, że tak siedzi i tylko siedzi ), no ale na moje oko, to dla tak małego modelu nie obowiązuje zasada proporcji jak w dużym lotnictwie - stateczniki powinny być dużo większe chyba.
-
No więc sprawy mają się tak. Pilota IR przetestowałem już wszechstronnie - jest dobry, ale do pomieszczeń zamkniętych, więc byłby ok, ale tylko do lotów na hali, a mnie to rzecz jasna nie zadawala. Zasięgi bez problemu można uzyskać do kilkudziesięciu metrów (do wielkości hali). Na zewnątrz pojawiają się problemy (szczególnie w piękną pogodę przy bezpośrednim słońcu) z promieniowaniem podczerwonym tła. Co prawda zintegrowany odbiornik podczerwieni ma wbudowane filtry, ale przy silnym promieniowanu, padającym bezpośrednio na soczewkę odbiornika, staje się niewrażliwy na naszego pilota, który ma raptem do dyspozycji z jednej diody nadawczej do kilkudziesięciu mW/sr natężenia promieniowanego pola IR i to tylko przy diodach IRED z małym kątem świecenia. Zasięg jaki mi się udało na zewnątrz uzyskać w tak prostym układzie (na razie), to raptem 10m i to w sytuacji, gdy słońce nie świeci bezpośrednio w odbiornik (wtedy jest zupełnie "głuchy"). Pewnie dałoby się coś jeszcze poprawić (obecnie są dostępne w handlu diody IRED o macach liczonych w Watach, a nie miliwatach), ale kosztem komplikacji układu, zobaczymy. Tak przy okazji mam już uruchomiony i dobrze działający tor radiowy, również w nieskomplikowanym i tanim urządzeniu (z odbiornikiem ważącym 3g), którego konstrukcję opisuję: TUTAJ (niebawem dalszy ciąg budowy nadajnika). Zdalne radiowe zamierzam zmodyfikować tak aby elektronika w nadajniku była modułem wyciąganym z obudowy nadajnika R/C i w razie potrzeby (jak będziemy chcieli z R/C przejść na C/L) przyłączanym w prosty sposób do uchwytu sterowego modelu C/L No i tu mamy już dużo większe możliwości dla modeli elektryków C/L (nowej generacji ), bo możemy nie tylko robić ON/OFF silnika zarówno szczotkowego (bezpośrednio) jak i bezszczotkowca (z dodatkowym regulatorem), ale również w pełni regulować dowolnie obroty silników zasilanych z różnej ilości cel LiPo (co daje nową jakość latania na uwięzi elektrykami, bo dotychczas najczęściej używane były timery tylko do włączania/wyłączania silnika). Poniżej linki do filmików (umieściłem je na YT): Sterowanie obrotami silnika szczotkowego (bezpośrednio z aparatury - sygnał PWM tylko z dodatkowym tranzystorem prądowym - odbiornik jeszcze na polu testowym) Sterowanie obrotami silnika bezszczotkowego (z dodatkowym regulatorem) (w obu przypadkach dodatkowo podpięta dwa serwa w trybie V-tail) Mamy również dwa dodatkowe kanały (podpięte tam wspomniane powyżej serwa), które dla elektryków C/L można dowolnie wykorzystać (chowane podwozie, oświetlenie, klapy dla wolnych przelotów itp - fajne rozwiązanie dla makiet uwięziowych). No i rzecz jasna będzie to możliwe do wykorzystania zarówno w mikrusach C/L jak i większych modelach uwięziowych. Przypominam, że opisywana przeze mnie aparatura radiowa (link wyżej) nie nadaje się raczej do sterowania R/C większymi modelami bo ma swoje ograniczenia (mimo całkiem sporych możliwości jak na tak prostą i tanią konstrukcję): brak rewersów i trymerów elektronicznych (no chyba, że zrobimy mechaniczne, tak jak za dawnych czasów), no i tylko 3 kanały. Powinna być za to dobra do mikrusów R/C i właśnie modeli elektryków na uwięzi (różnej wielkości), co sobie uświadomiłem dzięki temu tematowi założonemu przez Andrzeja. A że elektrykami C/L ludzi zaczynają się interesować świadczą chociażby te plany modelu o rozpiętości 20 cali (ok. 51 cm): MAMBA electric (z timerem) zaprojektowanego w 2014r. przez Petera Simona na podstawie oryginalnych planów spalinowego modelu C/L MAMBA f-my Mercury. PS Reszta opisu uniwersalnej aparatury R/C już w TEMACIE.
-
Ciąg dalszy pilota IR do mikrusów na uwięzi: pilot z lewej: DNP - dioda nadawcza podczerwieni. SW - switch (mikroprzycisk aktywujący pilota) - docelowo będzie coś wygodniejszego, a nie to maździabstwo. odbiornik z prawej: ZOP - zintegrowany odbiornik podczerwieni (wyrwany z TVC SONY, a więc z f nośną: 40kHz i taka nośna musi być ustawiona w pilocie) LED R - dioda świecąca czerwona jako kontrola zadziałania przy testach BUZ - sygnalizator akustyczny (buzzer) jako kontrola zadziałania przy testach. Dwa filmiki 30-to sekundowe z testów: TEST 1 - warsztatowy TEST 2 - na odległość Jutro testy na zewnątrz przy pełnym słońcu (ma być ładna pogoda).
-
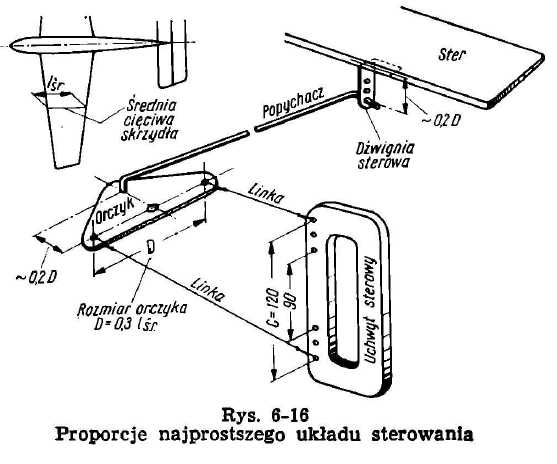
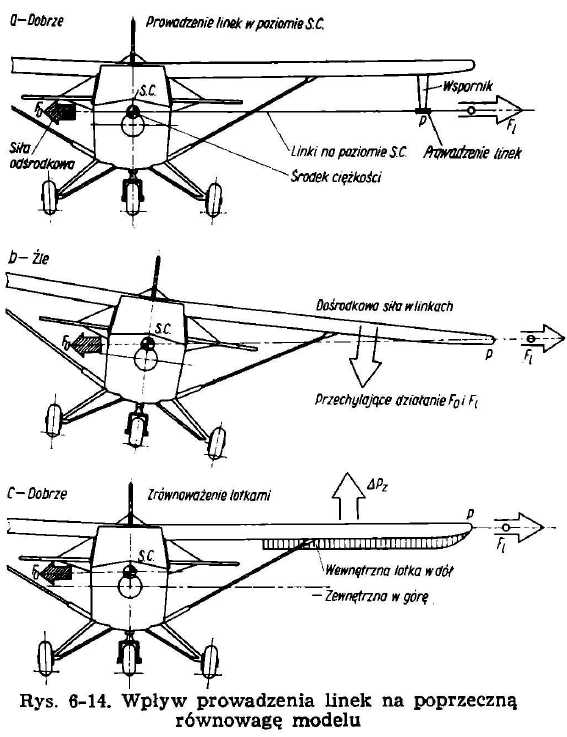
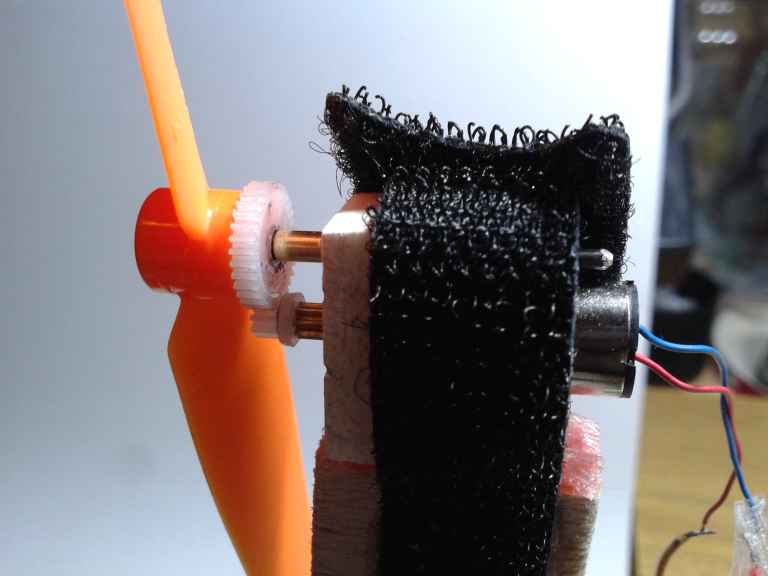
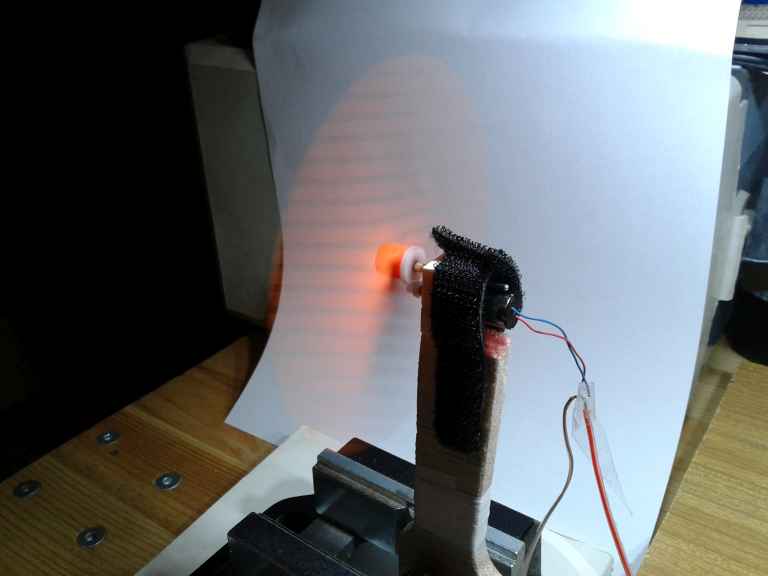
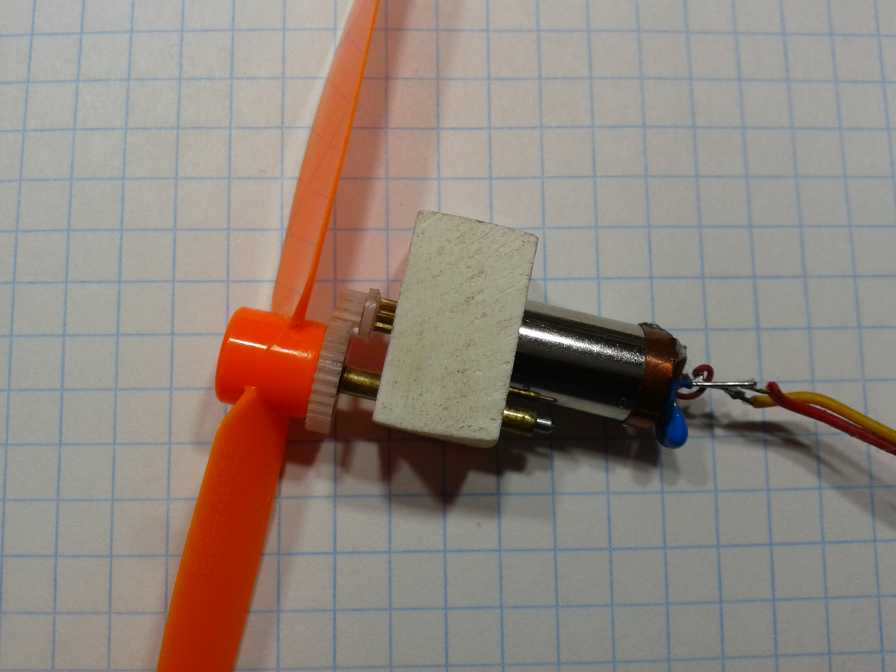
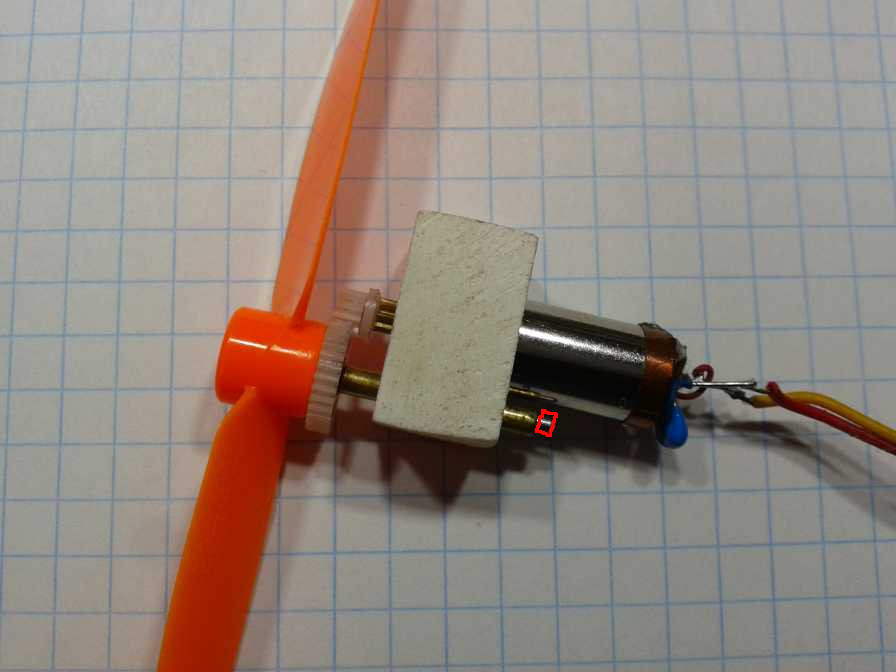
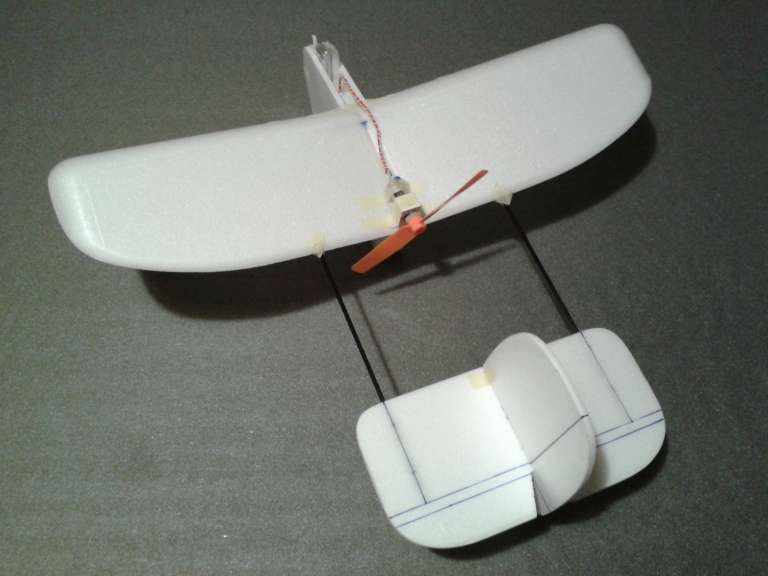
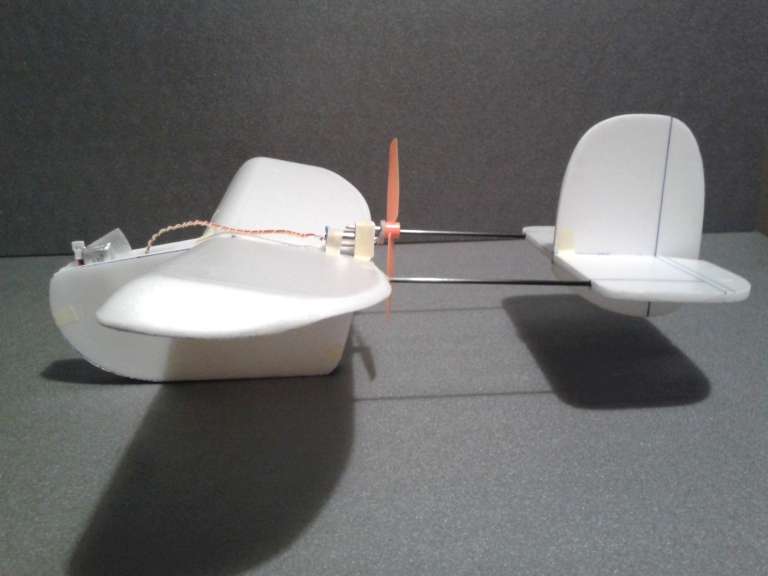
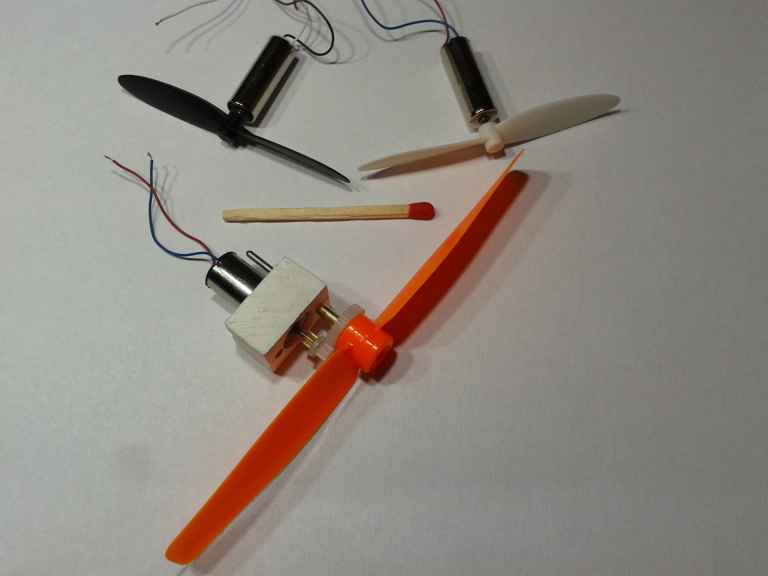
Jeśli chodzi o silnik DIY z przekładnią, to tak na szybko "wyryrałem" tylko do testów napędu przekładniowego: zawieszenie z twardego styroduru (płyta grubości 10mm). Kilka fotek wyjaśniających konstrukcję: ... docelowo zawieszenie będzie bardziej filigranowe (lżejsze) i też wykonam je z tego styroduru, bo jest lekki, a konstrukcja na wcisk wszystkich elementów umożliwia rozbieranie (wymianę w przyszłości np. zużytej tulejki ślizgowej osi śmigła). No i całość jest fajnie wytłumiona dzięki elastyczności styroduru. Szczegółowy opis konstrukcji tego napędu umieściłem TUTAJ Poniżej jeszcze fotki z testów ze śmigłem GWS EP-4025: Zrobię jeszcze testy ze śmigłem EP-4040 i 5-cio calowym (spodziewam się trochę większego ciągu). Jak widać nic nie ściemniam, podaje tylko real - wyniki ciągu są identyczne do tych na stronie HobbyKing przy podobnych napędach przekładniowych produkcji fabrycznej: TUTAJ ... no i jeszcze fotki wyjaśniające to o co się pytałeś: Dotychczas napęd testowałem jako tylny, więc śmigło wytwarzając ciąg opierało się zębatką na tulejce. Używając tego napędu jako przedniego na końcu osi trzeba zacisnąć (w nafrezowanym w ośce rowku) tulejkę ograniczającą, tak jak to zaznaczyłem na czerwono. W fabrycznym napędzie na koniec ośki wciśnięta jest tulejka plastykowa: W takim mininapędzie nie mamy do czynienia z dużymi siłami i ich momentami, więc tak jak pisałem wcześniej wszystko może być na wcisk, chociaż u mnie śmigło będzie przykręcane (podobnie jak orczyk serwa, z którego pochodzą zębatki mojego napędu) wkrętem z podkładką plastykową.
-
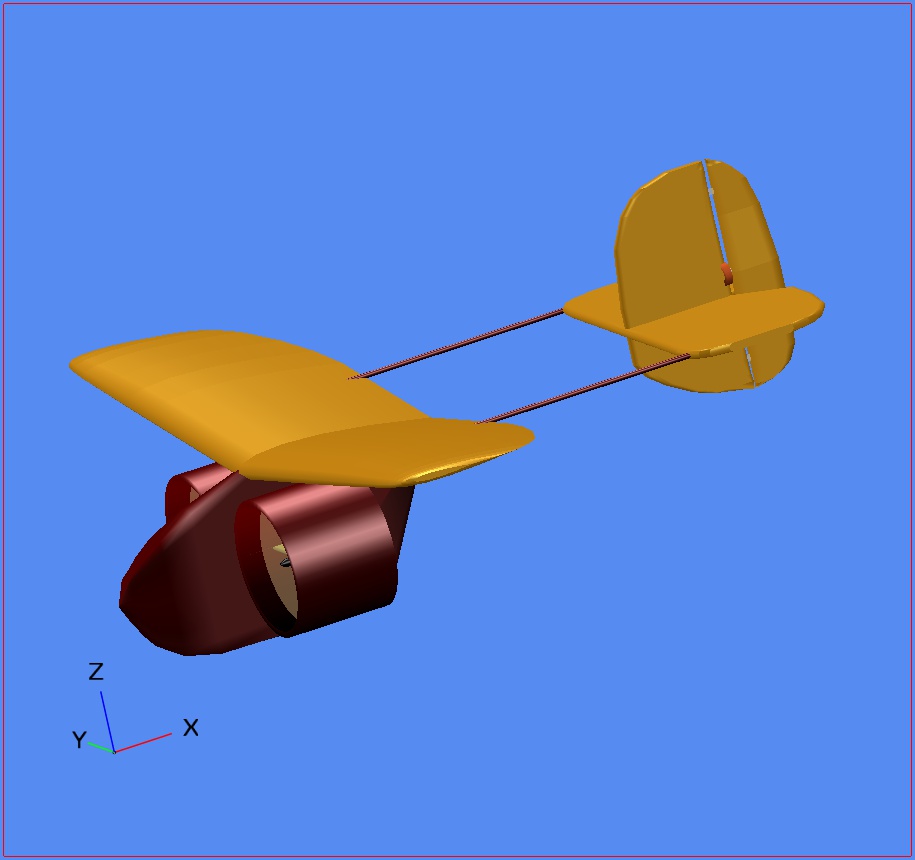
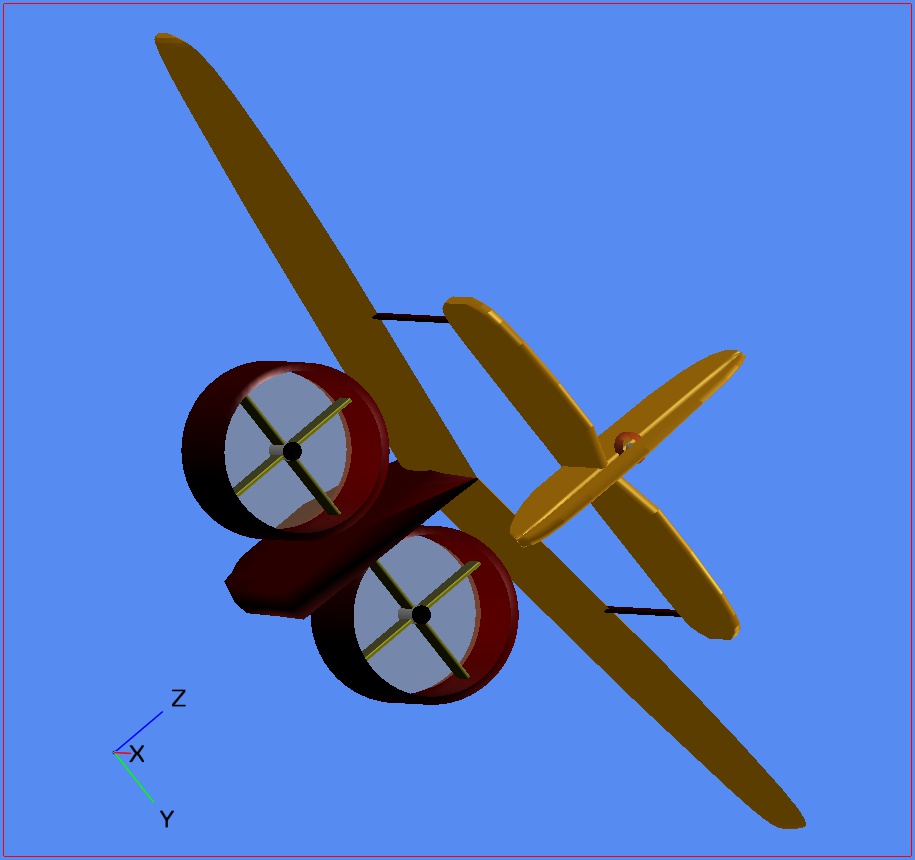
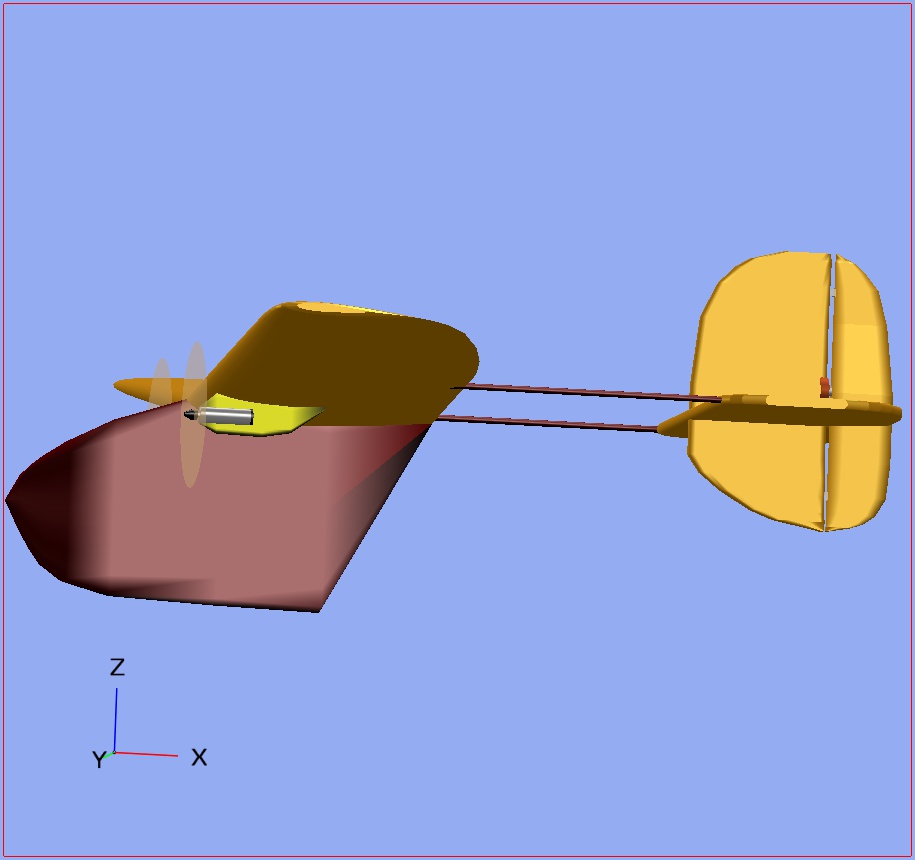
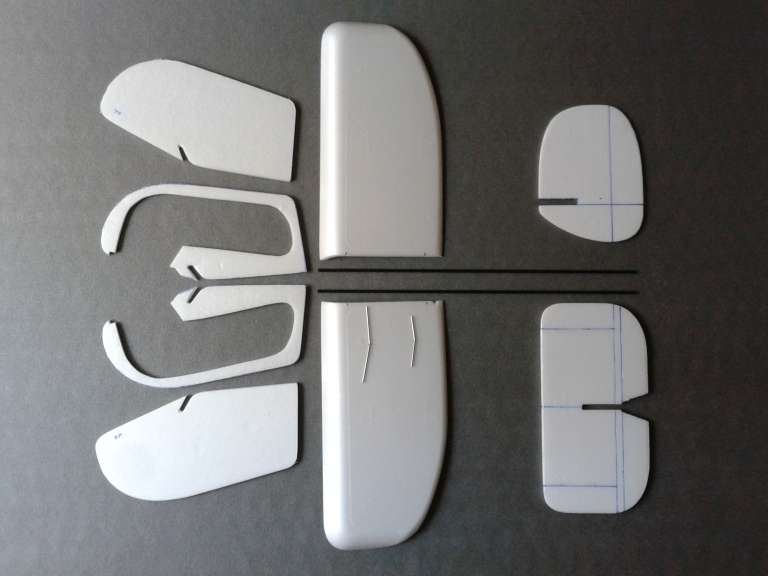
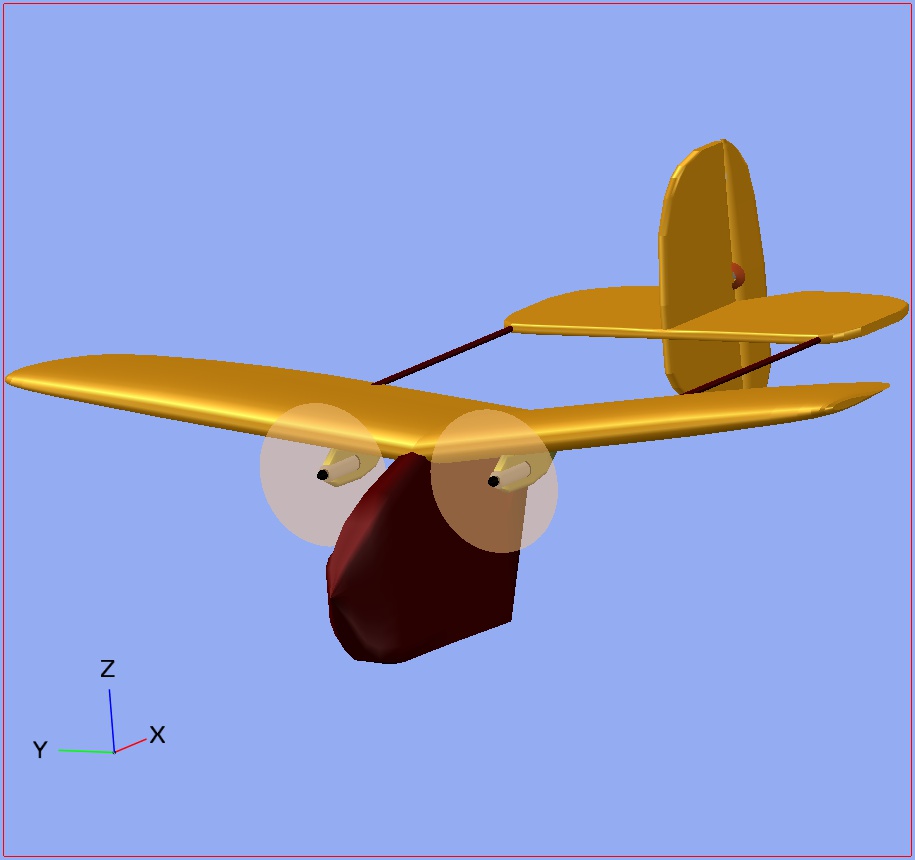
"Gacek z ośmiu tacek" (rozpiętość: 38cm) jeszcze nie latał. Projekt w realizacji, którego celem jest sprawdzenie możliwości wykorzystania zużytych tacek spożywczych do budowy takich małych i prostych w konstrukcji modeli latających dla początkujących (sam płatowiec składa się z ośmiu części wyciętych ze zużytych tacek, oraz dwóch kawałków rurki węglowej fi 2,5mm). W zasadzie jest to jedna z moich pierwszych (takich sobie "lajtowych") konstrukcji po 45-letniej przerwie w hobby. Na poniższych fotkach Gacek jest zmontowany tylko na próbę (sklejony taśmą papierową, co wyraźnie widać na zdjęciach), tak aby części trzymały się tylko kupy w celu praktycznego przebadania CG względem CP przy tylnym napędzie. Dla tego kąty zaklinowania powierzchni nośnych i ustawienie osi silnika nie są właściwe. Kilka dodatkowych fotek Gacka z tylnym napędem, obrazujących jego przypuszczalny końcowy wygląd: ... no i kilka innych wizji Gacka z przednim napędem: ... i widok alternatywnych napędów do Gacka (przedni: dwa silniki 7x20 ze śmigłami 2 i 1/4cala, tylny jeden silnik 8,5x20 z przekładnią 1:4 i śmigłem 4 cale): Gacek miał być jako prosty mini model R/C w dwóch wersjach napędów, ale dzięki twojemu tematowi Andrzej, chyba zrobię jeszcze wersję Gacka F/F z prostym timerem elektronicznym, oraz wersję C/L z wyłącznikiem optycznym napędu (tak cobyś nie czuł się osamotniony w tym temacie ). (EDIT) Zmiana planów. Będzie wyłącznik radiowy z regulatorem obrotów i dwoma dodatkowymi kanałami do wykorzystania na inne bajery w modelu elektryka C/L (czytaj dalej).
-
Te wymiary skrzydła pasują do tacki spożywczej. Co prawda to nie będzie styrodur, ale model styropianowy, tej wielkości jak twój - zrobiony z tacek (grubość 4mm) nie wychodzi szczególnie ciężki: No i docinając odpowiednio dwie tacki mamy od razu skrzydło z pseudo-profilem wklęsło-wypukłym (ptasim - jak u zarania lotnictwa) o max rozpiętości do 38cm (czyli skala orzeszkowa) i nie trzeba się dużo napracować : ... coś jak mój Gacek-wolnolatacz, który czeka na skończenie razem z aparaturą RC . Wrzucę kilka fotek jako przykład wykonania modelu z elementów z odzysku wielkością podobnego do miniuwięziowca Andrzeja. -części składowe Gacka: ... wizja artystyczna Gacka napędzanego dwoma silnikami 7x20 z dedykowanymi śmigłami 2 calowymi: ... i wersja z tylnym napędem (sklejona na próbę taśmą papierową) z silnikiem 8,5x20 z przekładnią 1:4 i śmigłem 4 calowym:
-
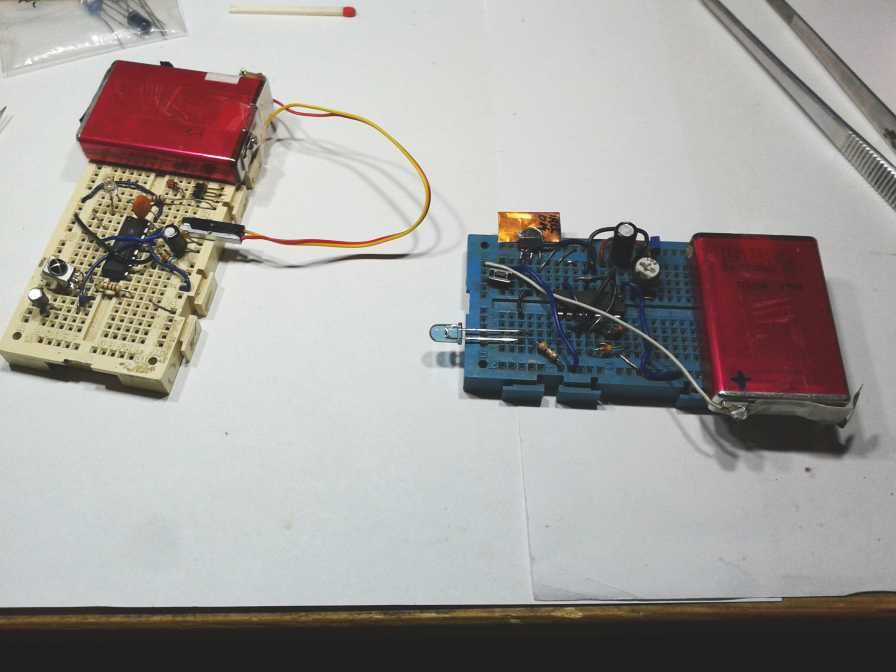
Andrzej jest na tyle zdeterminowany, że w końcu oblata jakiegoś mikrusa na uwięzi. Dlatego montuję dla niego elektronikę, ale poszedłem w zupełnie innym kierunku. Nie będzie to żaden z timerów (opisywanych wcześniej), bo te są dobre ale do modeli F/F. Do elektryka C/L potrzebujemy czegoś innego, tak żeby przy okazji wyeliminować dodatkowo pomocnika do wypuszczania modelu. Zrobiłem proste zdalne typu ON/OFF na podczerwień. Przy uchwycie linek zamontowany będzie pilot IR, łącznie z małym płaskim aku. zasilającym LiIo 1S (Samsung ICP103450R). Część odbiorcza IR w postaci mikromodułu z mosfetem prądowym do silnika zamontowana zostanie w modelu i zasilana z tego samego aku LiPo 1S co napęd. Andrzej sam będzie sobie startował i lądował kiedy zechce (bez pomocnika ). Pierwsze testy wypadły pomyślnie. Poniżej na foto układ po testach na polach stykowych. Z lewej odbiornik IR, po prawej pilot: ... po zmontowaniu na czysto będzie to wyglądać inaczej. Pilota dostosuję gabarytami do uchwytu linek (długi i wąski), a odbiornik zrobię jako mikro w SMD (nie będzie to jakiś szczyt miniaturyzacji ale w 3-4 g się zmieszczę na płytce 15 x 25 mm max.) Dal ciekawych: sercem zdalnego IR jest układ scalony zintegrowanego odbiornika podczerwieni, który wyrwałem ze starego telewizora SONY, wyrzuconego na śmietnik. (to ten mały pajączek zakreślony na czerwono): ... aku. LiIo Samsunga są też z odzysku (z uszkodzonego pakietu od lapka DELLa, gdzie padła elektronika nadzorująca, a akumulatory były dobre) Po skończeniu układ pewnie opiszę gdzieś w dziale z elektroniką (jeśli będzie zainteresowanie).
-
Z tego "nosiciela" to by pewnie to biedactwo zdmuchnęło jak nic! PS Masz gdzieś filmik z lotów tego "nosiciela"? Z ręki go chyba nie wypuszczasz? (z wozka startuje, czy jak?)
-
Gratulejszen! No to chyba pierwszy na tym forum tak elegancko wykonany mikrus, o tak małej masie startowej i co najważniejsze - ulotniony. Chyba nie było zupełnie bezwietrznie, bo wiatr (?) robił psikusy, albo coś z modelem jest jeszcze nie tak? Mam wrażenie, że jakby był trochę niedoważony (sam to zresztą podejrzewasz). Może masz również za duże wychylenia steru wysokości (szczególnie do dołu) dla tak małego, lekkiego i wolno latającego modelu (+/- ile stopni masz tam ustawione)? Chodzi mi o te gwałtowne przepadania (prawie całkowita utrata nośności na płacie), które się pojawiają przy zejściu do pikowania - widać to wyraźnie w 1 minucie 31 sekundzie pierwszego filmu (prawie już była kraksa, ale jeszcze uratowałeś sytuację tuż nad ziemią). Bardzo niespokojnie lata, póki co, a może pilot chciał poakrobacić? Ten napęd jest chyba tylko "na styk" do tego modelu - samolocik wytraca szybko prędkość przy raptownych "ewolucjach" (tak jak to widać na drugim filmie). Zauważyłem też dziwne zachowanie (widać to przy starcie 4-5 sekunda drugiego filmu) - po osiągnięciu pewnej prędkości podnosi tyłek (normalnie jak to przy starcie), ale potem zadziera gwałtownie kuper i nagle opuszcza jeszcze przed wyraźnym oderwaniem się od podłoża (tak jakby chciał zrobić kapotaż) - to już chyba normalne nie jest?
-
Andrzej, o jakiej średnicy masz ten "simering" do śmigła? Zostało mi z dawnych czasów trochę krótkich pasków gumowych od sprzęgieł do sprzętu audio, to może uda mi się coś dobrać, tak żebyś nie miał tego supła, który trochę szpeci ogólny look modelu (chociaż teraz pod kołpakiem to go nie widać). Z tym, że w razie czego będą czarne, nie białe.
-
Dawaj Tamasz czadu. Do dzieła! Fajny patent - "najciemniej pod latarnią"
-
Dzięki: Andrzej i Wojtek. Zaczyna się tu robić tłok i jest na co popatrzeć, co mnie bardzo cieszy!
-
Andrzej, to wszystko eksperyment i nie wiem, czy ktoś się bawił aż w takie małe mikrusy uwięziowe? Gdybym ja miał radzić (a też dopiero zacząłem eksperymenty z mikrusami) to najlepiej z powyższej oferty nadają się te wysokoobrotowe od małych droników: np. 7x20 lub 8,5x20. Kup dwa z dedykowanymi śmigiełkami: lewym, prawym i złóż napęd typu Colomban Cri-Cri: ... i masz na początek napęd: gotowca, bez eksperymentów ze śmigłami. Takie napędy na pewno były by dobre do minimodeli :F/F R/C. Do C/L - nie wiem, eksperyment w skali mikro? Wiadomo, że linkowce potrzebują "dodatkowej pary". Na dole orientacyjne parametry: Silnik 7x20 z dedykowanym śmigłem - 2 szt. Masa napędu ze śmigłami: 8-9g (ja miałem śmigła 2 i 1/4 cala czyli ok. 6cm, a tam w ofercie są 7,5cm?). Ciąg statyczny takiego dual napędu na wysokich obrotach: 40-50g. Dla dwóch silników 8,5x20 masa napędu 11-12g, ciąg takiego napędu z dwóch silników, myslę, że powinien być w granicach: 50-60g - nie testowałem akurat tych, bezpośrednio ze śmigłami na osi, bo miałem je z zębatkami, których nie chciałem ściągać - będę ich używał do napędów przekładniowych w moich wolniejszych mikrusach i jak już wcześniej pisałem z jednego silnika 8,5x20 z przekładną 1:4 i śmigłem GWS EP- 4025 (ok. 10cm) uzyskałem 40g ciągu, ale przy prądzie tylko 0,8A pobieranym z LiPo 1S (będę jeszcze eksperymentował ze śmigłem GWS EP-4040). Reasumując, dual napęd, typu Colomban Cri-Cri (sprawdzony przeze mnie): - z 2 razy 7x20 - masa napędu (ze śmigłami, bez zawieszenia silników): 8g, ciąg z dedykowanymi śmigłami 6cm, osadzonymi na osiach silników: 40g, pobór prądu z LiPo 1S: 2,4A Nawet jeśli nie przydadzą się te silniki do uwięziówki, to w przyszłości możesz je wykorzystać do mikrusów RC. No i jakieś wstępne podliczenie: -model: 10g -napęd: 10g (z zawieszeniem silników) -aku LiPo 300mAh: 8g (na 5 - 7 min lotu z takim aku) -włącznik/wyłącznik silnika IR (na podczerwień):4g (pracuję już nad tym - otrzymasz ode mnie taki gadżecik - nie będzie potrzebny pomocnik do wypuszczania modelu jak w przypadku timera. Sam będziesz załączał/wyłączał silnik z orczyka uwięzi) ... no i dojdzie jeszcze parę rzeczy (np. linki uwięzi - masa ??) --------------------------------------------- i mamy przy ciągu statycznym: 40gram porównywalną masę startową (bez malowania i z jakimiś lekkimi linkami do pierwszych testów, typu np. nić szewska - przy takim modelu nie trzeba nie wiadomo czego, aby się tylko nie rozciągały). Czy to poleci i jak, jeśli już?
-
Bezsprzeczna zaleta maluchów: takim modelem (do 600 gram max.) można latać obecnie w strefie CTR/ATZ w odległości nie mniejszej jak 1 km od granicy (siatki) lotniska, do wysokości 30m (lub wysokości najbliższych przeszkód: budynki, drzewa) i nie będzie to kolidować z obowiązującym aktualnie prawem (nic nie trzeba nikomu zgłaszać). PS Krzysiek, co z twoją "trumienką" Puławskiego? Kiedy kończysz?
-
Nie, nie, nie zabierać go stąd! Niech tam makietowcy bawią się u siebie swoimi makrusami. My mikrusy trzymajmy się razem.
-
... no i to jest najważniejsze. Czyli sprawdziło się to co przypuszczałem, jeśli chodzi o silniki od serw. Od czego masz te silniki, które widać na fotach? Jeśli to od zabawek pojazdów, to do latających maluchów raczej nie będą dobre - za cięzkie i za małe obroty. Ja dotychczas (tak jak w linku, który zapodałem wcześniej) eksperymentowałem z małymi i lekkimi silnikami wysokoobrotowymi od droników (zabawek latających) - one idealnie nadają się do zamontowania przekładni. PS Jestem po pierwszych testach basic-timera. To prościutkie urządzenie działa, zgodnie z założeniami. Testuję teraz czasy opóźnień i różne MOSFETy. Tak jak przypuszczałem (potwierdził to również Piotr, który zmajstrował już to ustrojstwo), basic-timer ma efekt zmniejszania mocy na silniku w końcowej fazie odliczanego czasu, co wynika z niezbyt stromej w zakresie Ugs(th) charakterystyki przejściowej: Id w funkcji Ugs. Jeden MOSFET to jednak nie przerzutnik elektroniczny. Jednakże efekt ten może być przydatny dla mikrouwięziówek (i nawet modeli FF), jak już wcześniej o tym pisałem. Chodzi o stałe naciąganie linek sterujących (lekkiego modelu) przez niedopuszczenie do wyłączenia silnika przed przyziemieniem. Mam jeszcze jeden pomysł na mikroelektronizację uwięziówki i nie będzie to żaden timer, ale na razie cicho, sza! Nie wszystko na raz, bo póki co czeka na mnie aparaturka RC do zrobienia szlifu końcowego.