maxiiii
-
Postów
2 111 -
Rejestracja
-
Wygrane w rankingu
9
Treść opublikowana przez maxiiii
-
Tak. Ma działać.
-
Daj connect.
-
Proponuję pogadać z marek_spy aby stworzyć kompleksowy zestaw do pomiaru prędkości na odległość na arduino. Taniej i prościej raczej nie będzie. Bez płytek , na pająka. Coś w stylu : gps - arduino - nadajnik rs - odbiornik rs- arduino - wyświetlacz. Przewiduję koszt całego zestawu na ok 100 zł.
-
No i jeszcze ten ryż nie rośnie w Chinach tak jak trzeba.
-
APK to rozszerzenie programów instalacyjnych w odmianie linuxa jakim jest android. Takie tower.apk, qgrountcontrol.apk czy droidplanner.apk. Przyczyną takiego zachowania najprawdopodobniej jest źle skonfigurowany kompas lub nieprawidłowe zasilanie 5V. Podałeś zbyt mało danych. Prześlij loga z takiego dziwnego startu to może więcej się wyjaśni.
-
Jakiej apki?
-
Masz problem z kompasem, powinieneś go odpowiednio skalibrować.
-
Wygrałem, byłem najbliżej ????
-
Albo nawet dwóch.
-
Osłona boczna snopowiązałki.
-
MEDUZA- skrzydło 2,6 m z poliwęglanu
maxiiii odpowiedział(a) na zbjanik temat w Skrzydełka, kaczki i "odrzutowce"
Marnie widzę start z ręki przy tym silniku. Ale kretoodporność nadrobi za wszystko:) -
MEDUZA- skrzydło 2,6 m z poliwęglanu
maxiiii odpowiedział(a) na zbjanik temat w Skrzydełka, kaczki i "odrzutowce"
Gratuluję pomysłu i wykonania. Zaczynam śledzić wątek i czekam na oblot. Jak masz zamiar startować tym kolosem i czy czasami ten silnik nie jest za słaby? Jakie zasilanie? Te schodki to też taki dziwny pomysł. -
Kolejny crash. http://youtu.be/7kzyyeCKwS4?t=292 http://youtu.be/owQTfuTWJ0A?t=44 Twój też jest na liście:) https://youtu.be/Ncq4aV1wmeo?t=124 i wiele innych https://www.youtube.com/results?search_query=crash+3dlabprint
-
A jak dresy to tylko adidas:) Chińskie badziewie zakłóciło chińskie nie badziewie. O czym to świadczy? A na 100 km nie lata się na 2,4GHz.
-
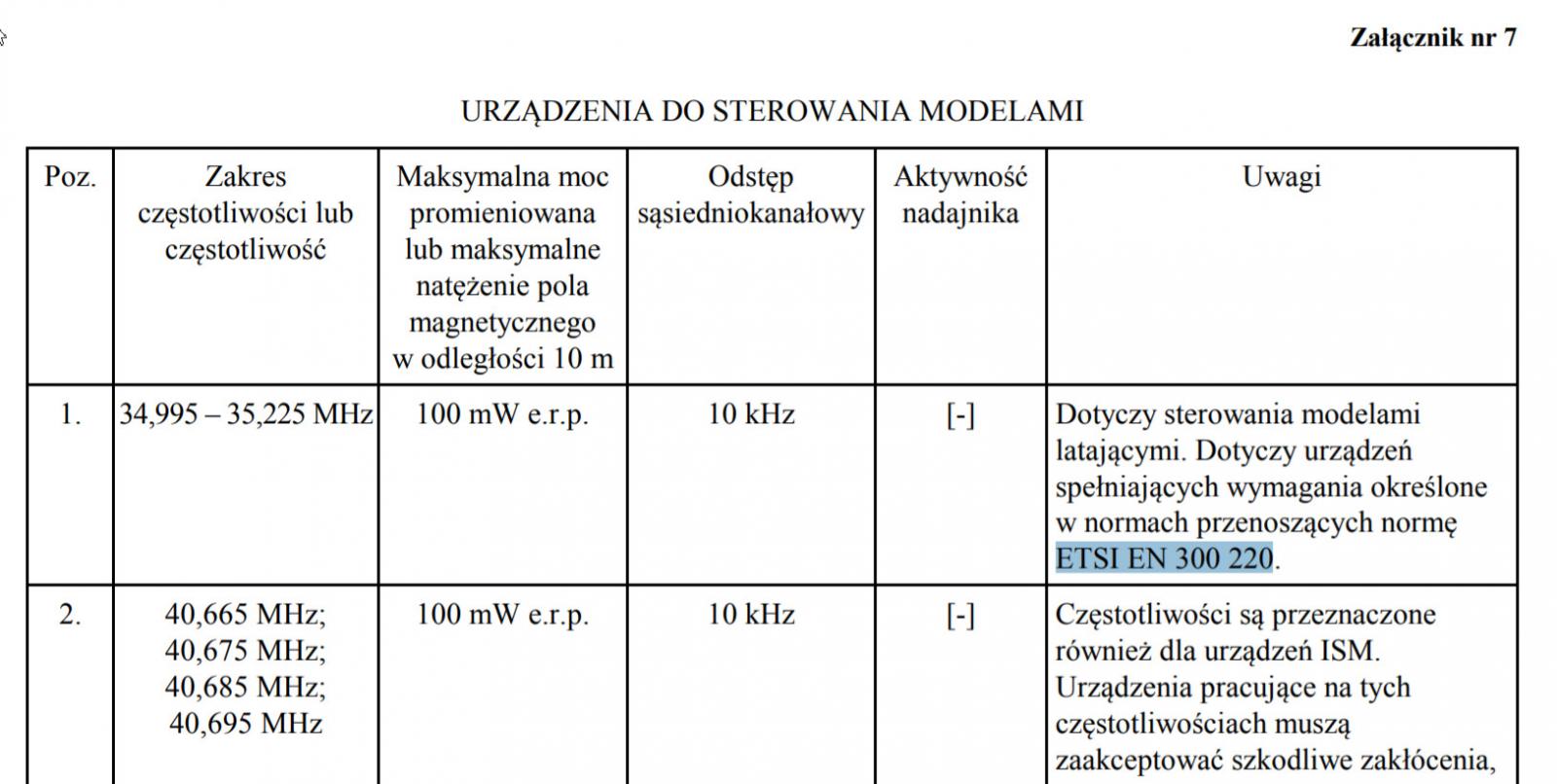
35 i 40 MHz. To, że wszyscy latają na linkach z nielegalną częstotliwością nikogo nie obchodzi. Żadna ze służb nie jest tym zainteresowana. Nawet Jeti stosuje 900MHz które w Polsce zajęte jest GSM i też nikomu to nie przeszkadza. Nic nie mam do futaby ale za to ty traktujesz użytkowników innych aparatur jako gorszy sort a tak wcale nie jest. A jak wspomniał wcześniej jakiś moderator na taranisie czy horusie można latać 10 cm od nogi bo na loty na 1km to tylko futaba. I to jest prawda (częściowa:) bo czy widziałeś loty na 100 km na futabie. Bo ja nie i to dlatego,że jest za cienka na takie loty. Za to taranisy er i horusy do tego jak najbardziej się nadają. I tym miłym akcentem............

-
Do zgrzewania folii
-
Dobre. A za szkody przy futabie pokrywa futaba? W ustawie nic nie ma o modulacji a jedyną legalną częstotliwością dla sterowania modelami jest 35 i 40 MHz.
-
Ja bym zaczął od słownika. Jutuba zostawiłbym na koniec. A tak na serio to akurat dlaczego tak sądzisz? I wiesz co to jest?
-
Paliwo takie drogie.
-
A to żona u ciebie nie grabi liści? U mnie żona grabi a ja wyrzucam kupki.
-
Trzy dni jazdy w tym roku ale 500km już zrobione:)
-
Może to cię zainteresuje. https://www.olx.pl/oferta/profesionalny-octocopter-td60-fpv-promocja-gimbal-pod-gopro-gratis-CID767-IDxevWc.html
-
Qlrs-a możesz zrobić sam lub kupić gotowca. Wtedy po wyjęciu z pudełka i włożeniu do aparatury działa od razy. Jest już skonfigurowany do pracy z PPM i mavlinkiem. Retransmisja też działa bez problemu. Pytanie tylko czy potrzebujesz takiego zestawu z aż takim zasięgiem? -
-
A to skyrc imax czy imax?
-
Temat ciekawy i już realizowany przez innych. Możesz coś wydrukować i rzucić cenę. Dowiesz się wtedy ilu jest chętnych na takie drukowanie.