oko
-
Postów
756 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Treść opublikowana przez oko
-
APM 2.6 - konfiguracja autopowrotu do łódki zanętowej.
oko odpowiedział(a) na Speedaco temat w Elektronika platformy
Wskazania kompasu muszą się zgadzać z rzeczywistym kierunkiem północy. Sprawdź jeszcze raz "zdroworozsądkowo" gdzie jest północ, z Myślenic to na Kraków będzie I potem skalibruj kompas, i jeżeli to nie pomoże to trzeba skorygować orientację kontrolera względem północy - jest to w zakładce "compass" w MP. -
APM 2.6 - konfiguracja autopowrotu do łódki zanętowej.
oko odpowiedział(a) na Speedaco temat w Elektronika platformy
Jest sterowany przez I2C, a moduł dla APMa podłącza się bezpośrednio do wyjść AUX: http://www.ebay.pl/itm/Led-Highlight-Expansion-Board-for-APM-LED-Light-Lamp-Status-Display-/162098708596?hash=item25bdd60074:g:pzgAAOSwLnBXWYLr Tu piszą że przez I2C działa dla Pixhawka, dla APMa nie (choć ma on dostępny ten port) http://ardupilot.org/copter/docs/common-external-leds.html -
APM 2.6 - konfiguracja autopowrotu do łódki zanętowej.
oko odpowiedział(a) na Speedaco temat w Elektronika platformy
Jak najbardziej: http://ardupilot.org/copter/docs/common-external-leds.html http://diydrones.com/profiles/blogs/external-arm-and-gps-led-kit-for-safety -
On jest z pianki? Ja bym go zalaminował, może "wyglądu by nie miał" ale na wojnie to różnie bywało. Główny problem to... brak połowy prawego skrzydła, chyba torbacze zabrały? 160 dolarów australijskich czy USD? Jakby dobrze poszukać to pewnie by się znalazło trochę pełnowymiarowych samolotów w interiorze w Australii, z racji wielkości kraju i gęstości zaludnienia?
-
APM 2.6 - konfiguracja autopowrotu do łódki zanętowej.
oko odpowiedział(a) na Speedaco temat w Elektronika platformy
Nie jestem pewien co do ArduBoata, ale ogólnie w całej rodzinie Ardu się to robi w parametrach (standardowych): http://ardupilot.org/copter/docs/prearm_safety_check.html#disabling-the-pre-arm-safety-check jest to maska bitowa, w której można ustawiać poszczególne bity odpowiadające różnym opcjom: ważnej pozycji GPS, akcelerometrom, odpowiedniemu napięciu itd. Można też skorzystać z opcji w Mission Plannerze bez "dłubania" w bitach. -
APM 2.6 - konfiguracja autopowrotu do łódki zanętowej.
oko odpowiedział(a) na Speedaco temat w Elektronika platformy
Można (i należy) to sprawdzić "na sucho" podłączając do komputera bądź telefonu przez USB (lub przez monitoring via BT/wifi). Mission Planner wyświetli wszystko co się w kontrolerze dzieje. Można ustawić zabezpieczenie by nie dało się uzbroić bez ważnej pozycji bazy. -
Przecież daje się wyłącznik od środka, albo odłącza zasilanie płytki. Poza tym BT chyba nie nadaje gdy się go o to nie prosi, wifi też można tak ustawić. W gimbalu STorM32 jego twórca przewidział wlutowanie płytki BT na stałe bez wyłącznika. Ja robię na kabelkach z możliwością odłączenia, ale ludzie twierdzą na rcg że moduł nie nadaje bez nawiązanego połączenia.
-
Już chyba nieaktualne Zresztą Zimbabwe nie jest reprezentatywne, aż takiej hiperinflacji to mimo wszystko raczej tam nie ma. http://forsal.pl/artykuly/904914,ten-kraj-jest-swiatowym-liderem-platnosci-telefonami-komorkowymi-lezy-w-afryce.html
-
Czechy ogólnie gospodarczo stoją lepiej niż my. Mają też proporcjonalnie więcej hobbystów niż u nas, warto zauważyć że na stronie jest instrukcja po czesku. Tak przypuszczam że znacznie więcej mają modelarzy w tradycyjnym tego słowa znaczeniu, to znaczy zrzeszonych w klubach i spotykających się regularnie, a nie droniarzy-wolnych strzelców jakich dużo jest u nas. Ale niekiedy skutki "zacofania" są korzystne. My mamy o wiele nowocześniejszą bankowość elektroniczną niż na zachodzie, gdzie ludzie od dawna są przyzwyczajeni do prostszych rozwiązań typu stały PIN zamiast haseł na sms. A w Afryce w najbiedniejszych krajach bardzo popularne są płatności na tel. komórkowe (nie smartfony). Za cenę (czeską) jednego takiego stabilizatora mam 3 autopiloty, nie lubię ich przekładać bo z tego są kłopoty.
-
Co w tym dziwnego? Tak jak T-shirt z nadrukiem: produkcja w Bangladeszu i transport 5-10 złotych, a sprzedać mogą i za 150 jak się znajdzie jeleń, i za 100, i nawet za 50 w "promocji". Tu koszt hardware wynosi maks. 80 złotych z przesyłką z Chin, reszta to marża producenta (za zamknięty soft, otwarty za darmo), sprzedawcy, jeszcze się posili i nasze państwo. Wszyscy wiemy jakie są prawa popytu i podaży na naszym niewielkim w sumie rynku. A na Białorusi tow. Łukaszenko oclił wszystkie paczki z Chin powyżej 22$ wartości, cieszmy się z tego co jest
-
Dotyczy to obu IMU? Proponuję wgrać wersję 0.96 i zrobić eeprom reset, 070 to jednak spora różnica.
-
Wygląda to na problem z konfiguracją. To najbardziej prawdopodobne, ale nikt nie da 100% gwarancji że np czujnik IMU zaczyna źle działać po jakimś czasie... czy są błędy I2C, zakładając że to ta wersja? Aktualizacja softu też nei zaszkodzi.
-
Jeśli o cenę chodzi, to za 20-30$ się produkuje kontroler z barometrem i jeszcze na opłatę za "darmową" wysyłkę starczy: http://www.ebay.com/itm/F18262-Flight-Controller-SP-Racing-F3-Upgraded-Version-EVO-4GB-Micro-SD-Card-/282104873230?hash=item41aec2c10e:g:EAoAAOSwtnpXjKaN http://www.ebay.com/itm/Horizontal-Side-Pin-APM-2-8-Flight-Controller-Board-For-Multicopter-Ardupilot/401230366546?_trksid=p2045573.c100506.m3226&_trkparms=aid%3D555014%26algo%3DPL.DEFAULT%26ao%3D1%26asc%3D20150817211709%26meid%3Dc17c441317394e28aa167267fa67790c%26pid%3D100506%26rk%3D1%26rkt%3D1%26 a co marketing z tym zrobi... to inna sprawa.
-
Jeżeli nie ma barometru (mała metalowa puszeczka z dwoma otworkami) to zapewne po prostu tego nie ma. Albo kombinują nie wiadomo po co by osiągnąć coś w miarę zbliżonego bez wydania tych kilku $ na barometr. Albo bezprzewodowo przez BT lub WiFi. Samolot na zdjęciu taki gładziutki to nie szkoda tym gniazdkiem to psuć? Kupiłem sobie trochę gniazdek USB z płytką do lutowania i w Pixhawkach podłączam je do zewnętrznego gniazda USB, tak by nie używać wbudowanego gniazda, które jest trudno dostępne i może się wyłamać.
-
Łódź autonomiczna
oko odpowiedział(a) na mikpasz temat w Statki , okręty, okręty podwodne , żaglowce
Nie interesowałem się tym zbytnio, ale sądziłem że autonomiczne żaglowanie jest bardziej zaawansowane. Teraz sprawdziłem i faktycznie nie ma tego w kodzie, jest troche projektów które obumierały dość szybko. Tu ciekawe informacje: http://arduskipper.blogspot.com/ http://diydrones.com/profiles/blogs/autonomous-sail-boat-part-three-simulation Z jednej strony, autonomiczna żaglówka to coś kuszącego do spróbowania w skali 1:1. Z drugiej, trzeba najpierw rozwiązać kwestie takie jak pomiar siły i kierunku wiatru, sił na sterze, prędkości względem wody... i tu jest trudniej niż przy lataniu. No i siłowniki do wybierania szotów. Ciekawe -
Rozbudowałem opis: http://pfmrc.eu/index.php?/topic/63229-dronestop/?p=663285
-
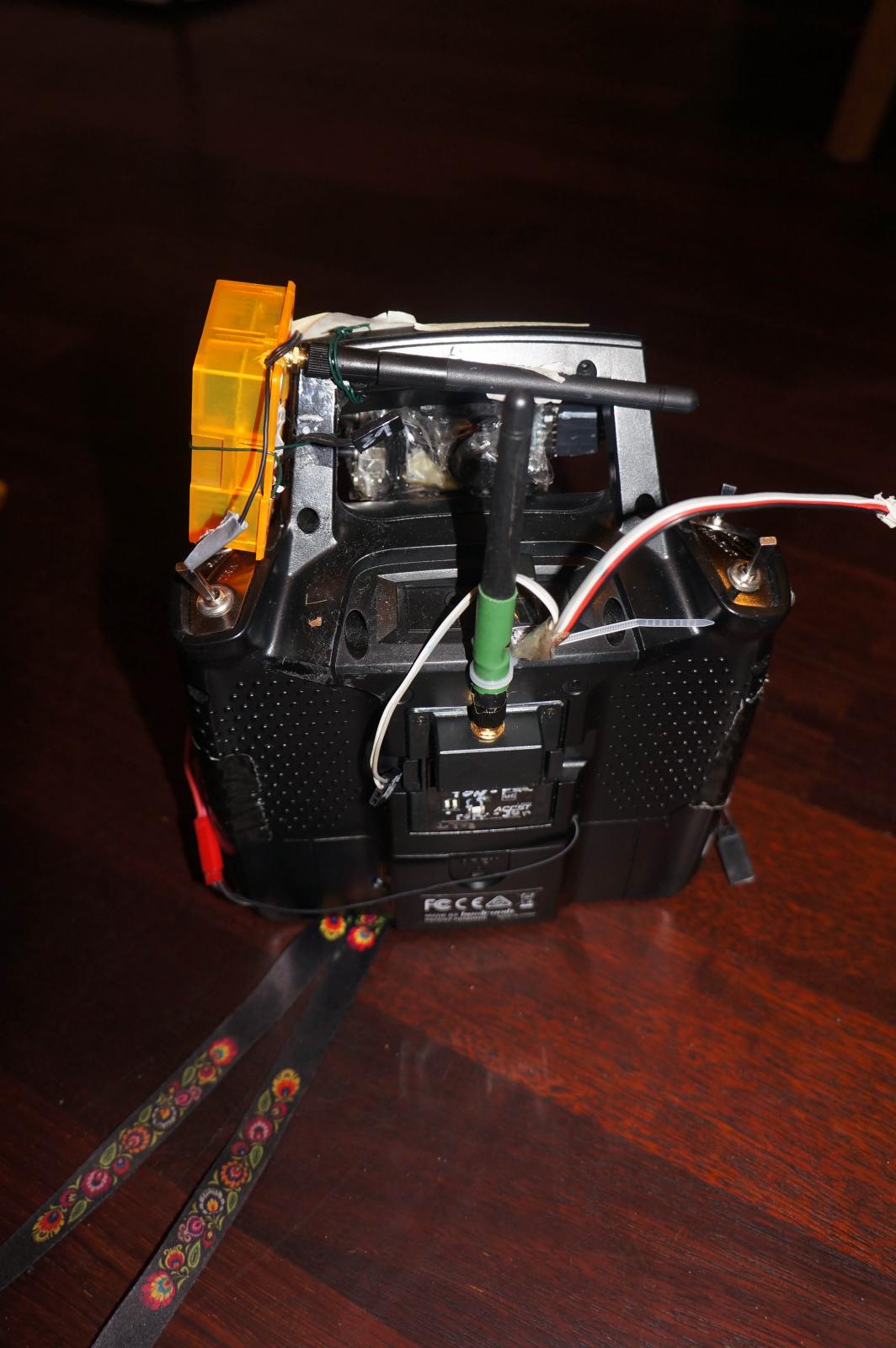
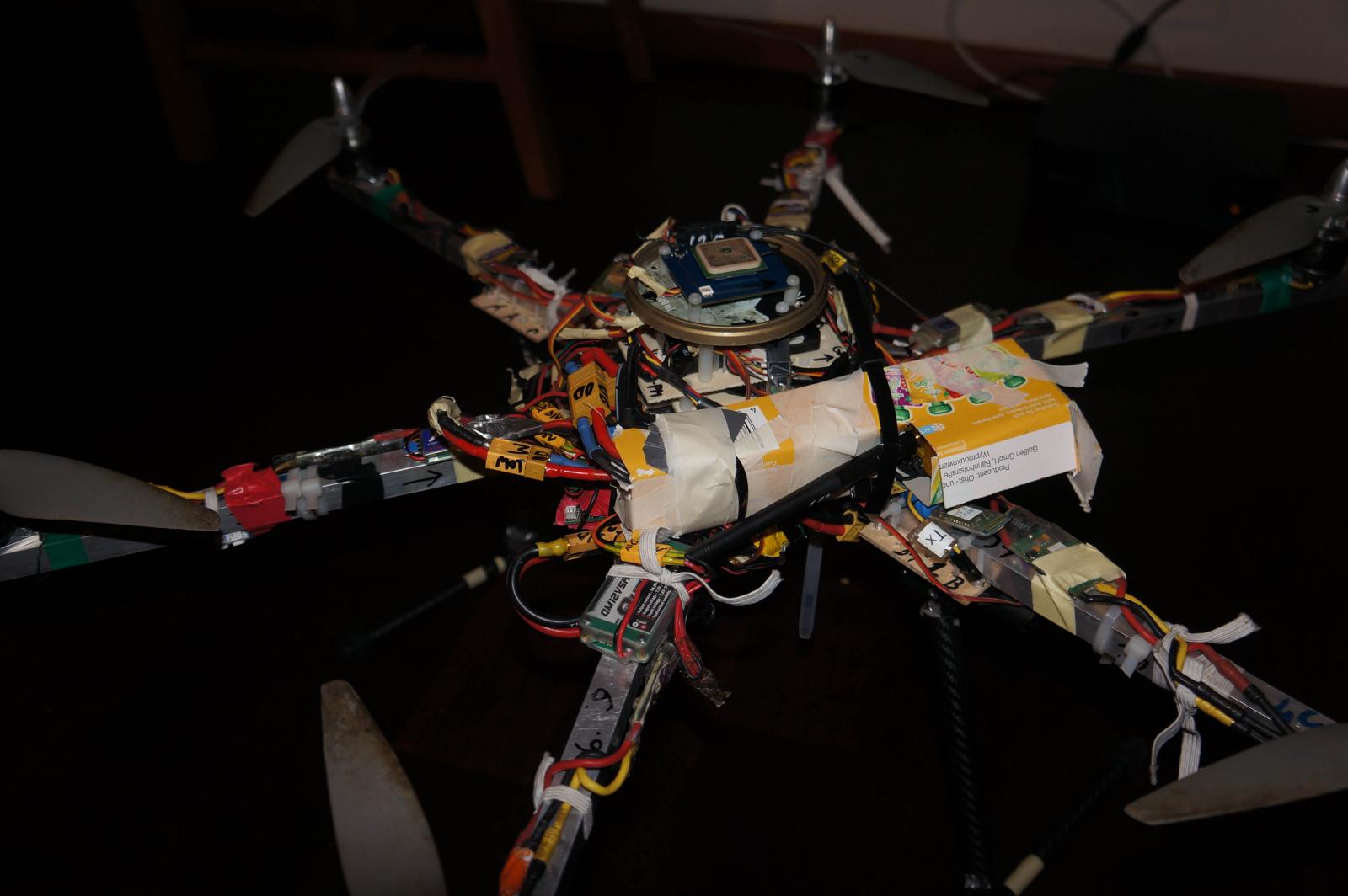
Po wielu godzinach w powietrzu, i wielu testach, dodaję opis mojej realizacji przedstawionej powyżej koncepcji. Realizacja dość toporna ale działa Ogólna koncepcja bez zmian: jeden moduł OrangeLRS przy aparaturze, drugi w kopterze albo samolocie. Podczas lotu ten w powietrzu nasłuchuje, ten w aparaturze jest wyłączony. Jeśli coś idzie nie tak, włączamy go i przez wciśnięcie przycisku na module sprowadzamy drona na ziemię. Oczywiście przed startem możemy włączać i wyłączać zasilanie aby sprawdzić czy całość działa jak trzeba. Jedno przyciśnięcie przycisku - wyłączenie, dwa - włączenie, albo odwrotnie, w zależności od tego czy wykorzystamy styki NC czy NO przekaźnika. Nie ma znaczenia czy korzystamy z kontrolera lotu/stabilizatora czy nie. Moduł OrangeLRS jest wymienny pomiędzy wersją kopterową i samolotową. aparatura: moduł zasilany z baterii radia, plus oddzielny wyłącznik. Korzysta z zasilania aparatury dla wygody, może być w ogóle oddzielnie trzymany (ale tak jest sporo zalet: kontrolujemy stan baterii, mamy całość pod ręką, nie zostawimy w domu itd). wersja kopterowa: przekaźnik 12V 40A, odcina zasilanie wszystkich silników. Podczas lotu prąd płynie przez styki NC więc nie ma problemu z oscylacjami i iskrzeniem. Dodany UBEC do zasilania OrangeLRS. Czyli na zewnątrz wychodzą dwie wtyczki ze złączami XT-60, włączone po przetwornicach +5 i +12V ale przed silnikami. Przekaźnik jest sterowany tranzystorem TIP102, z diodą zabezpieczającą tranzystor przed spaleniem od indukcyjności cewki przekaźnika. wersja samolotowa: przekaźnik niskoprądowy, odcina sterowanie regulatorem silnika (tylko przewód sygnałowy). Moduł OrangeLRS i przekaźnik zasilane z +5V od UBECa silnika. Czyli na zewnątrz wychodzą dwa złącza "serwowe" włączane między regulator silnika a kontroler albo odbiornik. Widać też "wewnętrzne" złącza do podłączenia modułu pomarańczki. Przekaźnik jest sterowany małym tranzystorem, N2222 jeśli dobrze pamiętam. Do dopracowania masa całości i obudowa. Nie trzeba wozić (pomarańczowej) obudowy pomarańczki, i obudowy przekaźnika. Pewnie coś lepszego niż opakowania po musach owocowych z Lidla też by się znalazło. Być może wersja samolotowa nie jest potrzebna, bo kopterowej można użyć w samolocie (odwrotnie nie). Kod jest tutaj: https://github.com/maciek252/DroneDown

-
Łódź autonomiczna
oko odpowiedział(a) na mikpasz temat w Statki , okręty, okręty podwodne , żaglowce
Na ArduPilocie da się zrobić wszystko. Ale co masz na myśli pisząc o stracie sygnału? Linku sterowania czy GPS? Jedno i drugie się da, tyle że po stracie sygnału GPS jak ma nawigować? Inercyjnie? Zliczając czas? To nie jest precyzyjne. Co do straty sygnału RC, tu masz trochę informacji: http://diydrones.com/group/apmusergroup/forum/topics/continue-mission-on-signal-loss musisz odpowiednio ustawić failsafe w odbiorniku, by APM wiedział że nie ma sygnału. -
Sprawdziłem i... nie wykupiłem Może gdyby było ubezpieczenie "Czyste sumienie", i tak nie zadziała ale za 15 złotych, to by się kupiło. Za 100 albo 200 za coś co i tak z dużym prawdopodobieństwem nie będzie wiele warte, i nic nie wskazuje na to by miało być inaczej... to tak jak z tymi kontrolerami lotu. Jest demokracja i każdy robi co chce! Za roczną stawkę można mieć system mojego pomysłu, który (z wysokim prawdopodobieństwem) wybawi nas z opresji gdyby nasz statek powietrzny zechciał się od nas uniezależnić. Służę informacjami i kodem. Przynajmniej mi lżej na duszy z takim czymś latając nad pustą łąką, niż z papierkiem który zadziała... albo nie zadziała... albo zwrócą 5% kosztów... albo się czepią że FrSky było w wersji non-EU...
-
Diody na piksie się świecą? Czy próbujesz tylko się podłączać do MP, czy także wgrywać soft z MP? Możesz spróbować z APM Plannerem, to alternatywny program o (trochę) mniejszych możliwościach, ale niekiedy działa tam gdzie MP nie chce. Sterowniki są tu: https://pixhawk.org/dev/usb_drivers a niekiedy windows samo chce coś instalować, niekiedy nie... z tymi windows to nigdy nic nie wiadomo, na linuksie działa i nic nie trzeba robić. Możesz spróbować jeśli masz możliwość. Jeżeli zupełnie nie będzie się chciał połączyć, to pozostaje próbować przez Bluetooth... przez port szeregowy... do telefonu z androidem przez USB-on-the-go... a jaki firmware jest wgrany na piksa?
-
ArduPlane ma tryb ACRO do akrobacji: http://ardupilot.org/plane/docs/acro-mode.html ale piszą (nie sprawdzałem, mam zamiar przystosować do tego laminatowy ASK-21) że nie zabezpiecza przed przeciągnięciem i trzeba się ratować MANUALnie.
-
Dzięki, fajnie że nie z Szanghaju, będą przed Świętami
-
Przy poprawnie rozwiązanej instalacji, z PowerModule i/lub zasilaniem z dwóch BECów zabezpieczonych diodami Schottky'ego i diodą Zenera, autopilot nie przestanie działać. Serwa będą zasilane, oczywiście nie będzie działać napęd. No i nie pomoże to w wypadku zwarcia lub pożaru baterii.
-
Tu nie jest to oczywiste. Pod względem sprzętowym wszystkie te układy są dość podobne. A istotną sprawą jest otwarty kod i aktywność społeczności, im większa tym więcej testerów, raportów o błędach itd. Ale każdy wybiera co chce, czy to nie piękne?
-
Wczoraj zupełnie niespodziewanie nadleciał nad moją ulicę kopter, wyglądał na coś phantomopodobnego. Był wysoko, ale bardzo ładnie było widać obrysowe diody LED, dwie czerwone i dwie zielone. Właśnie wchodził front chłodny i już było sporo zachmurzenia, ciekawe jak by to wyglądało na bezchmurnym niebie? Ale tak czy inaczej spodobało mi się, i teraz poszukuję odpowiednich diod tego rodzaju. Może ktoś ma coś sprawdzonego do polecenia? Silne i dookólne. "Corn LED" z HK https://hobbyking.com/en_us/led-corn-light-12v-2-6w-13-led-green-2pcs.html?___store=en_us mam i niezbyt się sprawdziły, składowe diody są dość słabe no i nie wszystkie widać. Czy to powinno być ze zintegrowaną soczewką taką by kąt świecenia był duży?