






Patryk Sokol
-
Postów
3 201 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
78
Odpowiedzi opublikowane przez Patryk Sokol
-
-
Od biedy można by powiedzieć, ze umieszczenie regli w środku ciężkości zmniejsza moment bezwładności. bo ich waga nie jest rozstawiona.
W praktyce nie ma to jednak wpływu który byłby mierzalny, bo silniki stanowią znacznie większą masę, rozstawioną znacznie szerzej.
Na początek cztery regle są bardzo fajne, taniej wychodzi jak jeden się spali

-
 1
1
-
-
Brr... Aż słychać trzeszczenie piasku w silnikach
Ale to pewnie i tak lepiej niż w Nysie, bo Nyski piasek jest magnetyczny.
Jaki uptilt używasz?
Wygląda na to, że mógłbyś już zacząć latać bliżej rzeczy, niż teraz
-
20-30st to praktycznie lot harrierem... Delta może taki kąt trzymać, typowe latające skrzydło raczej już nie..
Tyle pochylenie pomóc nie powinno, powód musi być inny, niż uwzględnienie kąta natarcia.
-
Zdjęcie na stronie BG jest przedpotopowe.
Obecnie silniki mają klasyczne, czterośrubowe mocowanie.
-
1
-
-
Faktycznie, otworów im brak...
Wciskane śmigła to zło, robiło mi to problemy nawet w Whoopie na 1s. W takim wypadku polecam zostać przy Brothera, tam się normalnie na dwie śruby mocuje
-
To ile s podaje producent nie bardzo ma znaczenie, bo tak naprawdę to prąd krzywidzi silniki, a nie napięcie
A same Brothery bez problemu użytkuję z pakietem 3s. Testowałem nawet z 3s i 3" śmigłami i wszystko było ok.
Niemniej, najbardziej polecam te silniki, w wersji 8000kV:
https://www.banggood.com/IFlight-XING-NANO-X1103-1103-8000KV-10000KV-2-3S-CW-Thread-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1551371.html?rmmds=detail-left-hotproducts__3&ID=528717&cur_warehouse=CNOsiągi jak Brothery, ale dzwonek jest jednoczęściowym kawałkiem aluminium (no i z pierścieniem stalowym zamykającym pole magnetyczne w środku), więc są naprawdę wytzrymałe.
-
Akurat Paweł dobrze błąd wytyka.
R9 potrafi być upierdliwy w ogarnięciu, kiedy robi się to po raz pierwszy, ale po ogarnięciu działa niezawodnie.
Pomagałem wielu osobom z problemami z tym systemem i zawsze było jakieś wyjaśnienie, zawsze gdzieś błąd leżał.
Ale to wymaga tego co robi 77hobby, czyli wymęczenia po kolei wszystkich etapów instalacji tego, sprawdzenia zasilania itp, itd.
Jeden jedyny raz kiedy była to wina odbiornika i nic nie pomagało, to w 77hobby wymienili bez gadania.
-
Myślę, że kolega zachęcając do naśladownictwa, na forum gdzie są sami faceci, to wiedział na co się pisze
-
I nie widzę przeciwwskazań do naśladownictwa
O, świetny pomysł.
Jak pojadę na lotnisko, to zdecydowanie temat przećwiczę i podzielę się fotkami
-
Cleanflight jest martwy
Zdecydowanie Betaflight.
-
1
-
-
To nie ma co kombinować, nie masz wielkich wymagań.
Z dostępny w Polsce to ten jeśli masz regla 4in1:
https://avifly.pl/pl/kontrolery-RC/holybro-kakute-f4-v2A ten jeśli masz cztery osobne regle:
https://avifly.pl/pl/kontrolery-RC/kakute-f4-aio-v2-
1
-
-
Powiedz tylko do czego chcesz go włożyć i jaki system RC używasz,
-
1
-
-
Z racji tego, że siedzę na L-4, to znalazłem trochę czasu, żeby o tych PIDach napisać.
Nie chciałem śmiecić w tym wątku to wrzuciłem nowy temat
https://pfmrc.eu/index.php/topic/82540-pidy-i-filtry-czyli-co-powoduje-%C5%BCe-quad-dobrze-lata/A tymczasem po testowałem parę rzeczy w moim toothpicku.
Przede wszystkim - zmieniłem kabinkę. Ideowo to samo, tylko wydrukowana z ABSu na komercyjnej drukarce. Inna klasa wytrzymałości zupełne, aże białe i brzydkie to inna rzecz.
Poza tym testowałem pakiety i śmigła.
Śmigła Emax Avan 3024 - jak się rozhustąły to były fajne, ale zdecydowanie przeciążały silnik. Przejście z zerowej przepustnicy do wyższej było mało stabilne, a reakcja na propwash fatalna.
Śmigła Emax Avan 2520 - Zdecydowanie sweetspot - trzy łopaty powodują, że quad się mniej ślizga, w pełnym gazie jest nieco więcej ciągu, a w powolnym lataniu żrą mniej prądu. Zdecydowanie moje ulubione śmigla do tego quada.
No i z testów wynika, że zdecydowanie pakiety 3s. Pakiety 2s widzę raczej do zabawy indoorowej.
-
1
-
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Kiedy zaczynałem bawić się w quady, to naczytałem się dużo bzdur.
O tym jak 32Khz to przyszłość, że filtry w BFie przewidują zachowanie pilota, albo że filtrowanie w Helio jest magiczne.
Problem z takimi rzeczami jest taki, że fajnei to wygląda na materiałach promocyjnych, ale utrudnia zrozumienie tematu.
Szczęśliwie - ja się przemęczyłem, ogarnąłem, więc mogę Wam opowiedzieć.
Miłego czytania
- Czym jest quad i po co mu flight controller
Jak jest quad większość z nas wie. Z grubsza wygląda to tak:
Czyli klocek z (z reguły) czterema patykami i czterema silnikami na końcu.
Brak nam tutaj rzeczy typowo kojarzonych z rzeczami latającymi, czyli skrzydeł, stateczników itp.
W efekcie quad zdecydowaną większość swojej siły nośnej generuje silnikami.
I to jest jeszcze w miarę jasne. Silniki kręcą, mamy ciąg, quad leci.
Brakuje nam jednak w tym wszystkim stabilizacji. Tzn. samolot jest konstrukcją stateczną. Wytrącony z równowagi, albo wróci z powrotem do stanu równowagi, albo chociaż nie będzie pogłębiał tendencji. Quad tego luksusu nie ma.
Quad wytrącony z równowagi z radością będzie kontynuował obrót. W praktyce - mały quad ma na tyle małą bezwładność, że już po dodaniu gazu zacząłby się obracać w losowych kierunkach. Większy pewnie dałoby się ustabilizować wykonując ręczne korekty, ale na pewno byłoby to dalekie od wygody.
W przypadku quadów latających w trybie acro - drążkiem sterujemy prędkością kątową z jaką obraca się quad. Tzn. drążek w neutrum odpowiada zerowej prędkości kątowej, a odsuwając go co raz bardziej na zewnątrz zbliżamy się do maksymalnej ustalonej prędkości kątowej.
Aby to umożliwić stosujemy właśnie flight controller. Jest to mały kawałek elektroniki, który odbiera od odbiornika RC prędkości kątowe jakie ma osiągnąć quad, porównuje to do swoich pomiarów (robionych żyroskopem) i tak steruje silnikami aby osiągnąć powierzone zadanie.
Oczywiście w tym wszystkim mamy jeden wyjątkowy drążek, którym jest przepustnica. Przepustnica nie steruje prędkością kątową quada, steruje sumą ciągów.
Tzn. Dając przepustnicę na 50% określamy średnie wysterowanie silników. Tzn. w stanie równowagi oznacza to, że wszystkie silniki rozkręcą się do połowy wysterowania. Kiedy quad zostanie z niej wytrącony, to tyle ile jeden silników zejdzie z obrotów , tyle drugi na nie wejdzie. W efekcie mamy zachowany stały ciąg.
Potrzebny jest nam więc mechanizm który będzie definiował jak FC ma reagować na niezgodność tego co chcemy, od tego co otrzymujemy.
I w tym celu stosujemy:
2. Pętla PID
Pętla PID jest obecnie najpowszechniej stosowaną metodą sterowania jaką znajdziemy w automatyce. Stosuje się to praktycznie wszędzie, od frezarek CNC, przez roboty przemysłowe po quady.
W najbardziej podstawowej, abstrakcyjnej formie zapisujemy to tak:
I w tym równaniu mamy:
u(t) = wynik funkcji kontroli (czyli kierunek i siła działania)Kp- Bezwymiarowy współczynnik określający znaczenie członu proporcjonalnego (czyli wartość P jaką wpisujemy w Betaflighcie)
e(t) - odchylenie wartości mierzonej od pożądanej, czyli błąd.
Ki - Bezwymiarowy współczynnik określający istotność części całkowej (czyli wartość I jaką wpisujemy
Kd - Bezwymiarowy współczynnik określający istotność części różniczkowej.
Tutaj wchodzimy stety/niestety w w troszkę wyższą matematykę. Ale spokojnie, wszystko się wyjasni jak wejdziemy w każdy człon po kolei.
To co trzeba zauwazyć, to to, że quadcopter posiada tak naprawdę trzy pętle PID. Po jednej na każdą z osi. Innymi słowy - w quadzie mierzymy trzy prędkości kątowe, określamy trzy żądane prędkości kątowe i wyliczamy trzy funkcje błędu.
Dla uproszczenia będziemy mówić o jednej z osi.
Pętle PID mają różne implementację. Pneumatyczne, czysto mechaniczne, czy cyfrowe. O ile mechaniczne, czy pneumatyczne działają w sposób ciągły, tak systemy cyfrowe nie mogą sobie na to pozwolić, bo procesor może przeliczać tylko jedną rzecz na raz.
W efekcie kolejne elementy pętli PID są przeliczane po kolei i raz na jakiś czas otrzymujemy wynik, którym jest komenda dla regulatorów silników.
I tutaj się dowiadujemy czym tak naprawdę jest słynne taktowanie pętli PID, które wyrażamy w Hz.
Kiedy mamy taktowanie pętli PID określone jako 8kHz to znaczy, że 8 tysięcy razy w ciągu sekundy jest wyliczana pętla PID i 8 tysięcy razy w ciągu sekundy silniki dostają nową komendę.
Mówi to nam o jednej ważnej rzeczy. Minimalne opóźnienie przy pętli 8kHz to 0,125ms. Przy pętli 32kHz 0,03125ms, więc cztery razy szybciej.
Czysty zysk, prawda? Nic tylko coraz wyżej taktować pętle PID, a quady będą latać coraz lepiej.
I to niekoniecznie jest prawda. Do wymyślenia dlaczego muimy porozmawiać o budowie pętli jako takiej.
Dlatego:
3. Część proporcjonalna pętli PID
Część proporcjonalna pętli ma wzór prosty do bólu:
Czyli mnożymy wartość błędu (e(t)) przez współczynnik wzmocnienia (Kp).
Z tego płynie prosty wniosek - siła reakcji tego członu jest wprost proporcjonalna do odchylenia od pożądanej wartości.
I ten człon jest głównym motorem napędowym reakcji. Mamy duży błąd, reaguje mocno. Nie ma dużego błędu - siedzi cicho. W efekcie - odpowiada on na bieżący stan układu.
I tu nie ma wiele więcej do powiedzenia. Rozpatrujcie go jak taką gumkę, którą im mocniej się napnie, tym bardziej ciągnie
Jedyne co warto więcej zauważyć, to to, że ta część mało reaguje na drgania, tak długa jak nie mają one amplitudy. Nie interesuje jej częstotliwość drgań, czas narastania, nic - tylko położenie od żądanej wartości.
4. Część całkowa pętli PID
Część całkowa zahacza już o bardziej złożone kwestie, więc i wzór ma bardziej złożony.:
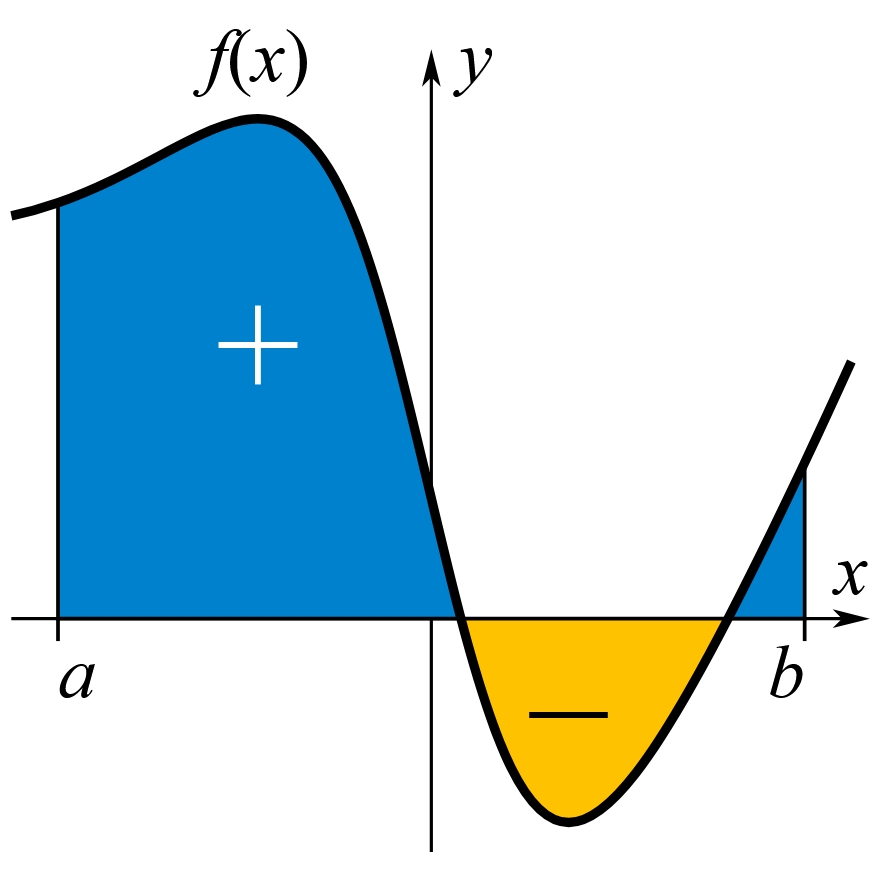
W tym oznaczeniu mamy do czynienia z całką Riemanna (czylu całką oznaczoną). Graficzną interpretacją tej funkcji ładnie obrazuje obrazek z Wikipedii:
Czarna linia pokazuje nam funkcję f(x). Zaś pole pod krzywą (przyjmuje się, ze poniżej zera ma ona ujemną wartość) obrazuje nam całkę w przedziale od a do b.
Innymi słowy - całka oznaczona jest po prostu polem pod wykresem funkcji.
W przypadku naszej pętli PID mamy całkę z funkcji błędu w czasie od i do t (gdzie i to jakaś arbitralna wartość czasi, np. z 10 ostatnich iteracji pętli PID).
W efekcie człon ten odnosi się nie tylko do obecnego stanu układu, ale też bierze pod uwagę przeszłość.
Kiedy mamy do czynienia z małym błędem, który trwa w czasie to część proporcjonalna nie wykaże na niego żadnej rozsądnej reakcji (z jej perspektywy to ciągle ten sam błąd, na który reaguje bardzo delikatnie). W efekcie stały, mały błąd nie zostanie przez współczynnik proporcjonalny wyeliminowany w żadnym rozsądnym czasie, będzie tylko powolutku, asymptotycznie dążyć do zera, tak aby osiągnąć to zero w nieskończonym czasie.
Część całkowa z kolei liczy pole pod wykresem błędu od czasu. W efekcie mały błąd najpierw daje mala reakcję, ale z każdą chwilę kiedy jest on nieskorygowany, tak długo będzie wymuszał coraz większą rekcję członu całkowego.
W efekcie - część całkowa jest tym co poprawia nam błąd skumulowany. W praktyce u nas jest to np. przesunięty środek ciężkości. Przy zerowym współczynniku całkowym quad zawsze będzie ciągnął w jedna stronę, powolutku, płynnie się w nią przechylając. Z kolei np. w locie do przodu będzie chciał się wypłaszczyć, bo tak każe aerodynamika.
Latanie w ten sposób to ogólnie ciekawe doświadczenie, polecam spróbować, to nie jest niebezpieczny eksperyment
Część całkowa ma też jeszcze jedną przyjemną cechę - jest całkowicie bezpieczna. Tzn. z racji mierzenia pola pod wykresem nie jest w stanie quada rozkołysać, rozgrzać silników, być czułą na drgania, nic. Można bezkarnie podnieść i pięciokrotnie, a quadowi nie stanie się krzywda, po prostu będzie coraz "sztywniej się prowadził"
Problem polega na tym, że na razie mamy wciąż quada który jest mocno rozchwiany i potrzebuje czasu, aby osiągnąć potrzebne przez nas prędkości kątowe. Da się tym latać (próbowałem
), ale nie polecam nikomu.Aby rozwiązać ten problem przejdźmy do:
5. Część różniczkowa pętli PID
Część różniczkowa służy do...
przewidywania przyszłości...
Z racji tego nie może mieć szczególnie prostej definicji:
To co widzicie wyżej jest wbrew pozorom bardzo proste. Część różniczkowa jest po prostu iloczynem współczynnika Kd i różniczki funkcji błędu.
Różniczkę ładnie obrazuje nam obrazek z Wiki:
Czarna linia to nasza funkcja e(t), a czerwona linia, pokazuje pochodną policzoną w punkcie styku. Linia ta pokazuje nam nachylenie krzywej w tym punkcie, dzięki czemu wartość pochodnej w tym punkcie równa jest tangensowi nachylenia stycznej.
Dla prostego zobrazowania:
funkcja o stałej wartości (quad lezy na stole) - pochodna ma wartość zerowąquad ciągle przyśpiesza w stałym tempie - pochodna ma stałą wartość.
Innymi słowy współczynnik ten reaguje nie na wartość funkcji błędu, a na szybkość jej zmiany, niezależnie w którą stronę nastąpiła zmiana.
Na tym polega więc jego przewidywanie przyszłości. Widzi, ze nagle zaczyna się wartość zmieniać, więc pętla PID odnosi się do tego co ma się stać i już zaczyna hamować.
To trochę jak ktoś się na Was zamachnie kamieniem, od razu się schylicie, zanim kamień już poleci.
Problem polega na tym, że jest to współczynnik bardzo istotny, ale też bardzo czuły na drgania. Wynika to z tego, że reagowanie na zmianę jest niezależne od wartości tej zmiany. Niezależnie od tego czy quad momentalnie przyśpieszy w jakimś kierunku, czy jest to jest bardzo szybkie drganie - dla pętli PID nie ma to znaczenia, zareaguje równie gwałtownie.
To jest główny powód dla którego tyle szarpiemy się z filtrowaniem odczytu żyroskopu. Żeby drgania zrobiły problem części proporcjonalnej, czy całkowej musiałyby mieć duża amplitudę, a takich silniki i aerodynamika nie generują. Część różniczkowa z kolei nie dba o amplitudę. Dla niej większa częstotliwość równa jest większej reakcji .W efekcie - bez filtrowania quad bez filtrowania rusza na księżyc od razu po uzbrojeniu
I dlatego współczynnik D jest uznawany za niebezpieczny. Ustawiony zbyt wysoko powoduje, że silniki zmieniają moc tak szybko, że przestają nadążać, a przez to mogą się nawet spalić.
Niestety - jest to jedyna nasza metoda działania przeciw bardzo szybkim zaburzeniu równowagi. Propwash, wibracje od aerodynamiki, gwałtowne zatrzymanie drążka, - to wszystko obsługuje część różniczkowa i to ona zapewnia nam tak naprawdę dobrze latającego quada.
6. Całość pętli PIDJak widzicie - pętla PID to nie magia, to zwykła suma analizy tego co wypluwa żyroskop.
Myślę, że fajnie obrazuje co robią poszczególne człony ta prosta animacja:
Pięknie widać jak część P reaguje na komendę, część I kasuje drobny, zaległy błąd, a część D kasuje zbędne wahania.
Teraz - zastosujmy to w quadzie
7. Setpointy - czyli jak wyznaczyć błąd
Jak ustaliliśmy - pętla PID operuje na różnicy między między zmierzoną prędkością kątową quada. Trzeba więc jakoś określić wymagania dotyczące prędkości kątowej quada.
W tym celu mamy ustawienia Rate'ów. Czyli dla każdej osi mamy kilka cyferek która pozwalają ustalić jaką prędkość obrotową quad osiągnie maksymalnie oraz jaki kształt ma ta krzywa.
Problem polega na tym, że to nie będzie działać prawidłowo.
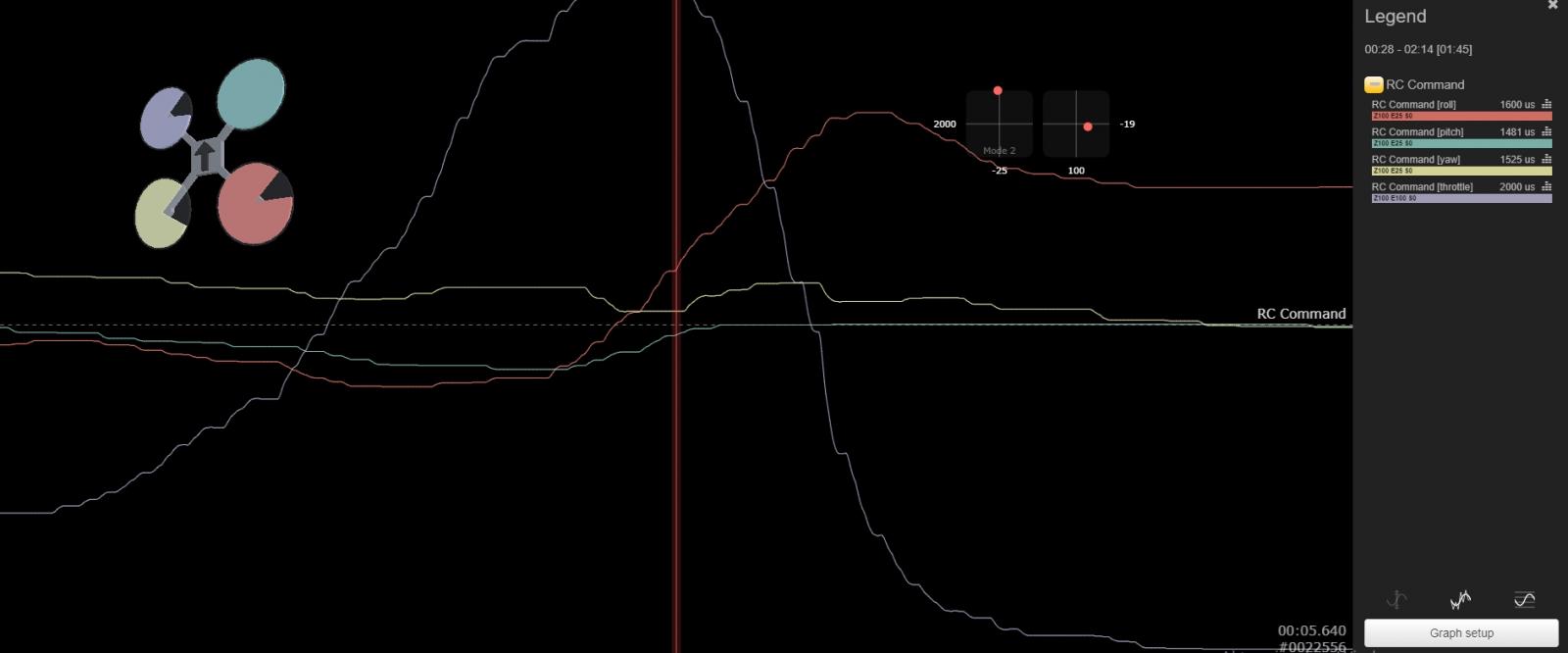
Komendy które przekazuje nadajnik wyglądają tak:
Czyli jak widać ich zmiana jest skokowa. Wynika to z tego, że współczesne nadajniki RC używają cyfrowych systemów kodowania. Przesyłane są one paczkami i z każdą kolejną paczką mamy do czynienia ze skokową zmianą wartości. Dla nas - jest to bez znaczenia, kanciastość jest na tak drobnym poziomie, że nie da się jej w ogóle wyczuć (nie, że jest niewyczuwalna, po prostu nie da się tego wyczuć).
Problem polega na tym, że kiedy krzywa jest nieciągła (kanciasta), to jej pochodna staje się nieokreślona. W efekcie musimy stosować filtrowania sygnału.
To daje nam coś co nazywamy setpointem, czyli komenda RC przemnożona przez współczynniki do określenia szybkości obrotów, a następnie przepuszczona przez filtrowanie, tak aby zmiana jej wartości była płynna.
To daje już nam podstawę do wyznaczenia wartości błędu. Wystarczy odjąć wartość zmierzoną od setpointu
8. Filtrowanie - po co nam to i jak to działa?
W quadzie filtrowanie ma jeden główny cel - odsianie wszelkich wibracji, czy to od silników, czy to od aerodynamiki, tak aby pętla PID zajmowała się jedynie faktycznym ruchem quada.
Teoretycznie sprawa jest prosta.
Najwyższe sensowne rate'y do coś koło 2000deg/s, czyli poniżej 6hz. Teoretycznie wystarczy ustawić więc filtr dolnoprzepustowy, tak aby wszystkie zmiany powyżej 6hz były odrzucane były gotowe i happy?
W sumie to jest jeszcze propwash, na który trzeba zareagować - poniżej 50hz przechodzi i git?
No też nie - filtr dolnoprzepustowy który odetnie wszystko powyżej 50hz musiałby mieć częstotliwość odcięcia około 25hz (można liczyć, że sensowne tłumienie zaczyna się od dwukrotności częstotliwości odcięcia) daje nam solidne 10ms opóźnienia.
Wynika to z własności fizycznie wbudowanej we wszelkie filtrowanie. Wprowadza ono opóźnienie, tym większe im szerszy jest zakres filtrowania i im niższa jest częstotliwość odcięcia.
I to jest własność fizyczna filtrowania opisana w teorii sygnałów, tego zwyczajnie nie da się zmienić.
Stąd zawsze powinniśmy dążyć do dwóch rzeczy:
1. Jak najmniej filtrowania, żeby opóźnienie było jak najniższe
2. Jak najczystszy sygnał, tak aby reakcja pętli PID była jak najszybsza.
To jest powód dla którego tak naprawdę porzuciliśmy płytki z procesorem F1, a teraz płytki z procesorem F3. Zamiast filtrować wszystko jak leci, dbamy o to żeby filtrować jak najbardziej precyzyjnie.
Przejedźmy się teraz po sposobach filtrowania.
Jak tylko powiem Wam jak prosto przeanalizować sobie drgania w quadzie
9. Wykresy wodospadowe drgań
Jest sobie takie fajne narzędzie jak Plasmatree PID Analyzer:
https://github.com/Plasmatree/PID-Analyzer
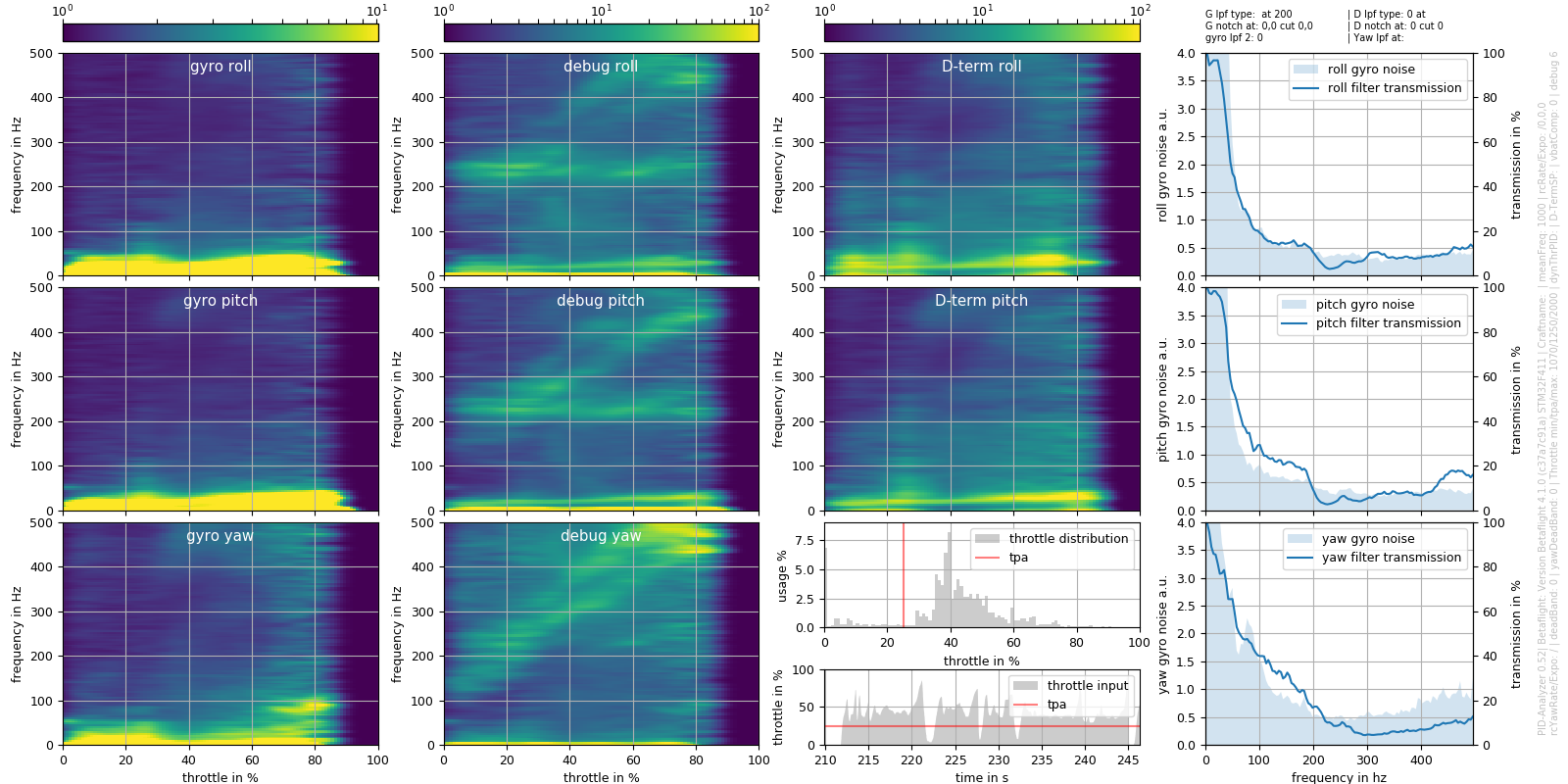
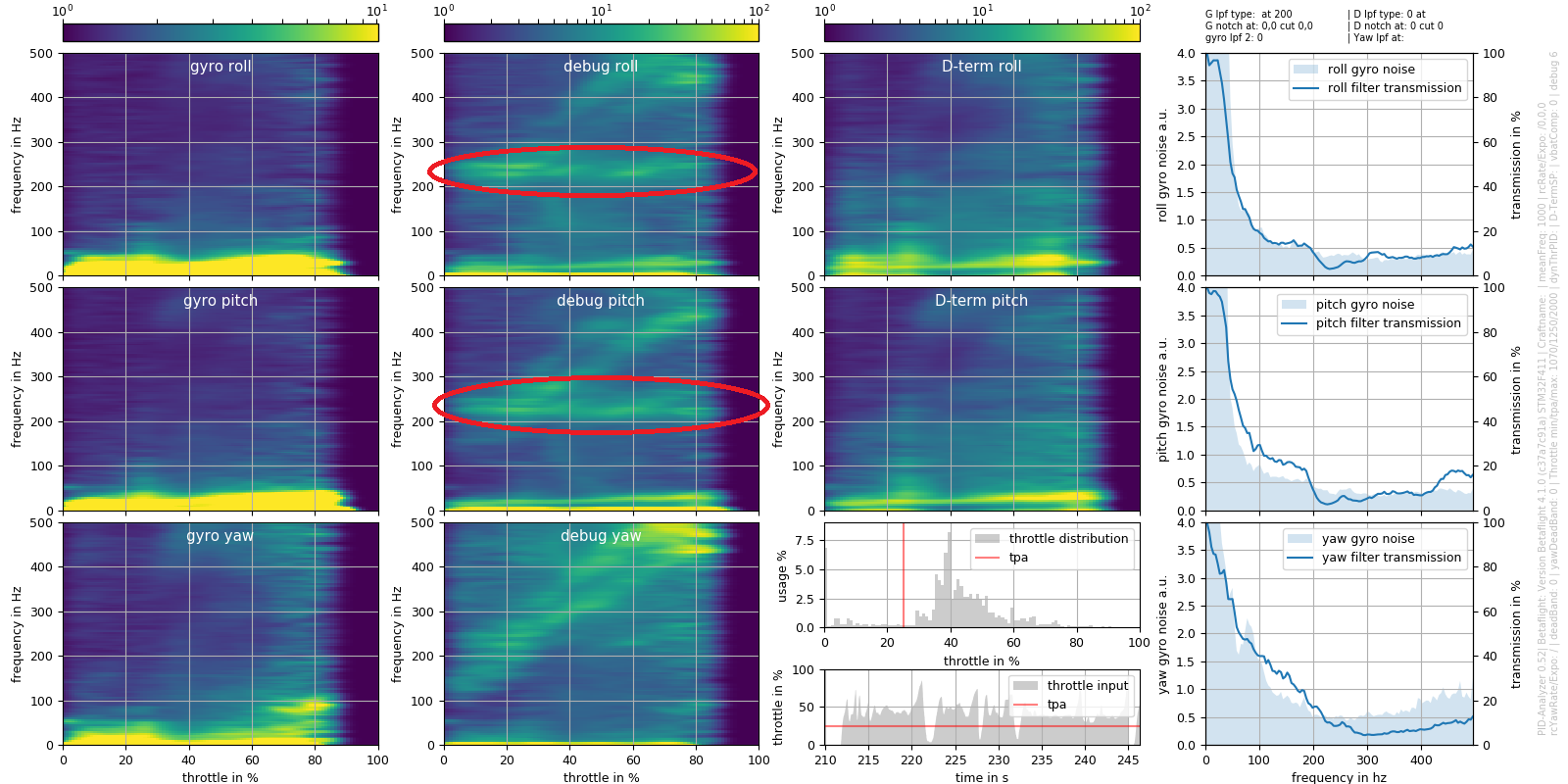
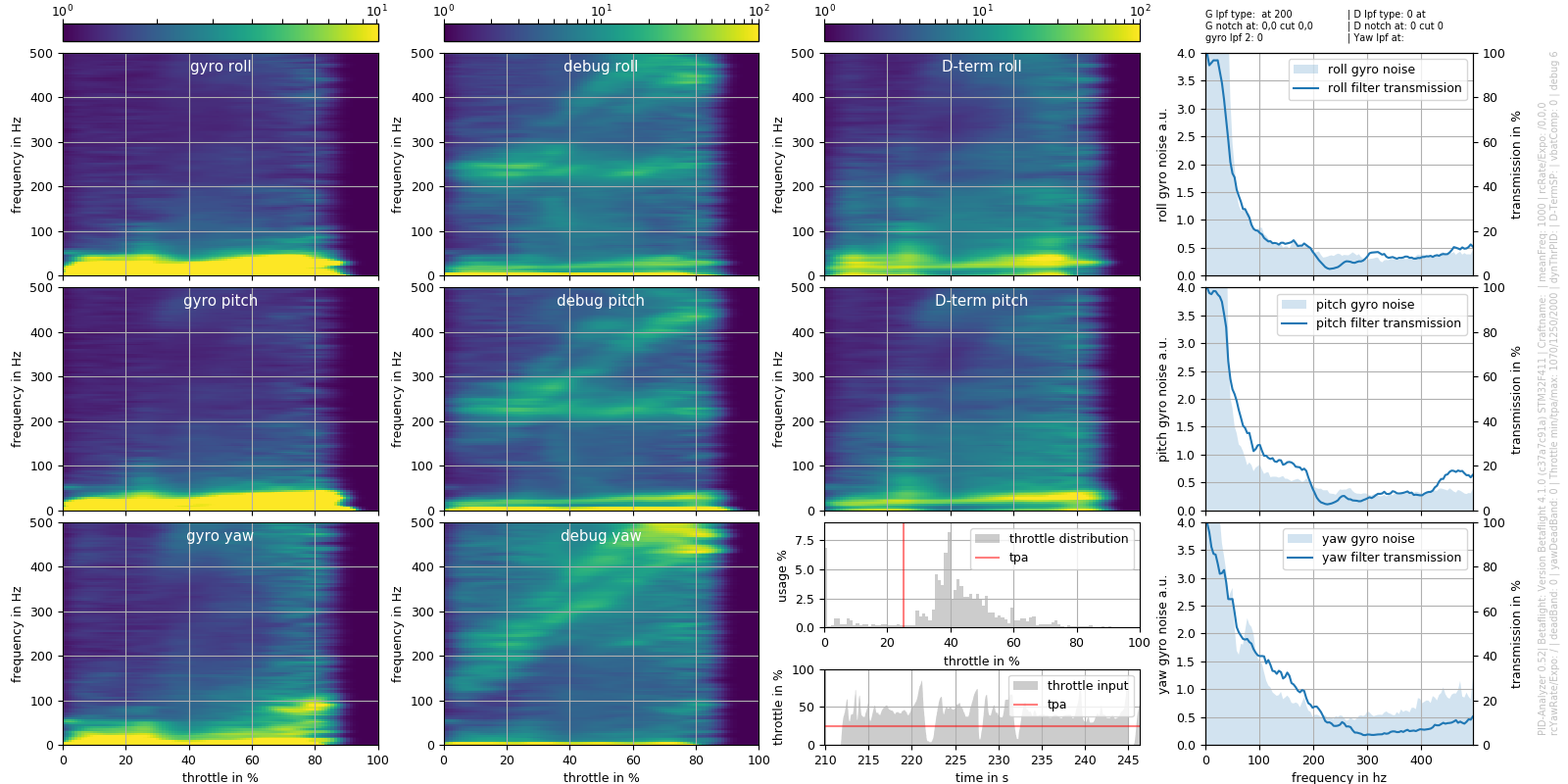
Analizuje on logi z BlackBoxa i generuje nam coś takiego:
Wykresy te pokazują nam graficznie gdzie nam coś drga i ile energii tam można znaleźć.
Na osi X mamy procent przepustnicy, na osi Y częstotliwość drgań. Kolor określa nam ile jest energii przy danym położeniu przepustnicy dla danej częstotliwości. Jeśli np przy 50% przepustnicy i 300Hz widzicie żółty kolor to od razu wiadomo, że coś tam drga.
Środkowa kolumna pokazuje nam jak wygląda to przed filtrowaniem, a lewa kolumna pokazuje jak wygląda to po filtrowaniu. Prawa kolumna zaś pokazuje nam drgania samej części różniczkowej pętli PID. Jest to o tyle przydatne, że część różniczkową filtruje się dodatkowo.
Bardzo lubię jak na tych wykresach widać jak pracują silniki. Praktycznie zawsze widać dwie belki idące w górę częstotliwości z przepustnicą. Belka mające niższą częstotliwość to są przednie silniki (bo przednie silniki mają lżejsze życie. Nie muszą walczyć z tym, że quad woli lecieć poziomo niż pochylony do przodu), a belka umieszczona wyżej to silniki tylne.
W gratisie mamy jeszcze wykres obrazujący jaka jest przepuszczalność naszego filtrowania. Powinny przechodzić rzeczy tylko dla niskich częstotliwości.
10. Statyczne filtry środkowozaporowe (Static notch filters)
Ten typ filtrów, to filtry których używamy do pozbycia się jednej stałej częstotliwości drgań, np. rezonansu ramy. Są to wąski filtry, które ręcznie ustawiamy na konkretną częstotliwość.
Bardzo łatwo oszacować kiedy będą potrzebne:
Tutaj oznaczyłem jak wygląda coś co potrzebuje statycznego filtra. To jest prawdopodobnie rezonans ramy. Niezależnie od przepustnicy mamy drgania na tej częstotliwości.
Teraz wystarczy ustawić tylko filtr statyczny na tej częstotliwości, a jego szerokość ustawić tak aby objęła cały zakres drgań.
Oczywiście testujemy, czy filtr zjadł wszystko, jak zjadł to dobrze, jak nie to trzeba go poszerzyć.
Filtr środkowozaporowe ogólnie stosować warto. Nie dodają znaczącego opóźnienia, nie obciążają procesora, a sprawnie zabezpieczają przed tym, żeby filtry dynamiczne zajmowały się tymi drganiami (a mają lepsze zajęcia).
11. Dynamiczne filtry dolnoprzepustowe (Dynamic low-pass filter)
Od wersji 4.0 Betaflight wprowadził filtry dolnoprzepustowe powiązane z przepustnicą. Idea za nimi stojąca jest taka, że kiedy mamy ustawioną wyższą przepustnicę, wtedy drgania quada uciekają w stronę wyższych częstotliwości. Założenie nie jest bezpodstawne. Wtedy zarówno silniki drgają wyżej, jak i drgania aerodynamiczne uciekają w stronę wyższych częstotliwości. Dzięki temu kiedy potrzebujemy powalczyć z propwashem, to filtry te generują niższe opóźnienie, niż kiedy np opadamy na małej mocy.
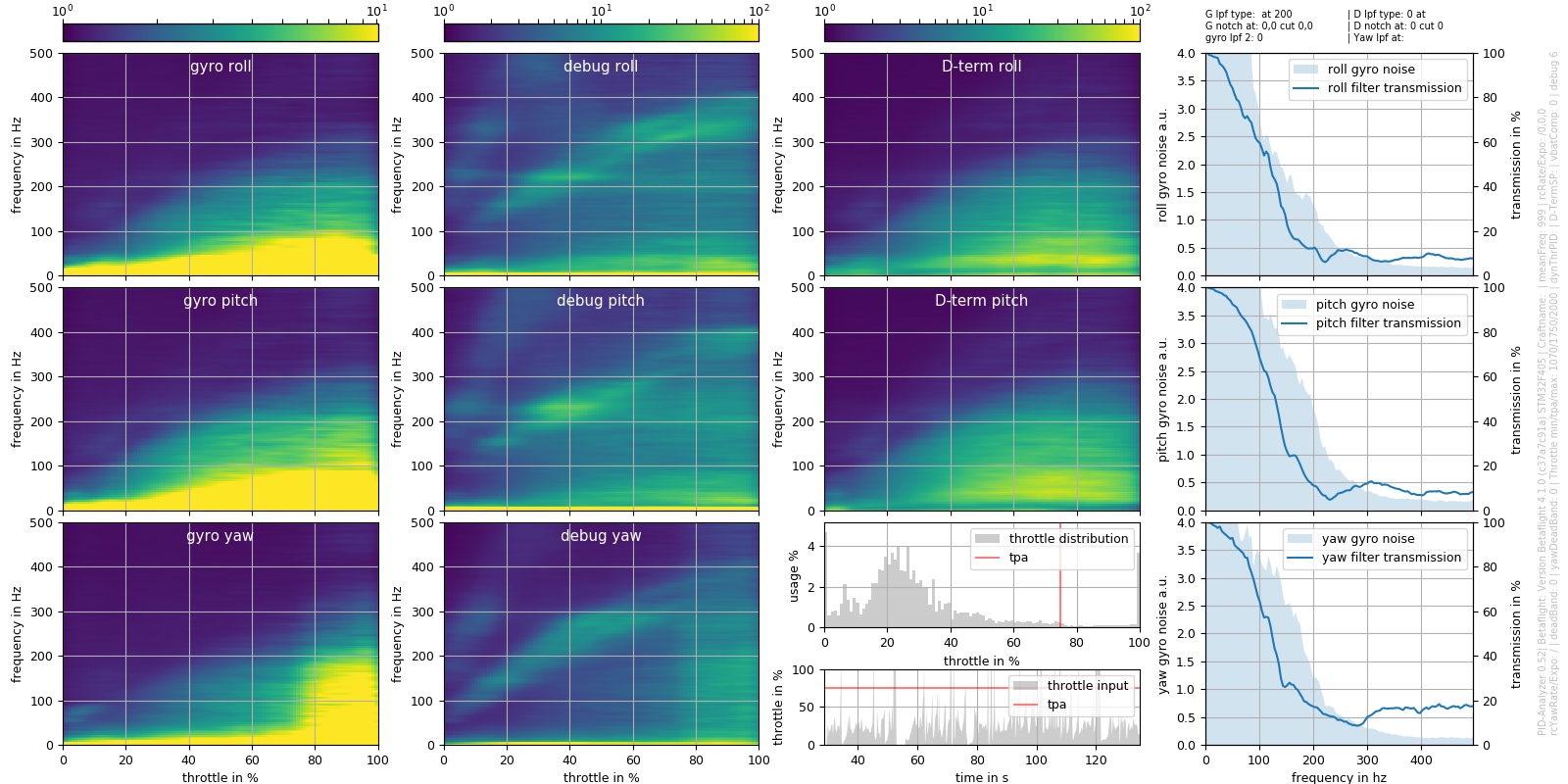
Ich regulacja jest bardzo prosta. Stopniowo podnosimy częstotliwość minimalną i maksymalną filtra, aż zacznie wyłazić coś takiego:
W lewej kolumnie, już po filtrowaniu, widać jak wylewa się syf dla stosunkowo niskich częstotliwości przy wyższym gazie
12. Dynamiczny filtr środkowozaporowy (dynamic notch)
To jest z kolei bardziej złożony typ filtra. FC analizuje w jakim zakresie ma najwięcej drgań (używając transformaty Fourriera, bo ARMy mają do tego dedykowaną jednostkę obliczeniową - ot taka ciekawostka). Rzecz bardzo przydatna, bo fantastycznie tłumi drgania, które szkodzą najbardziej, a ma mikry wpływ na opóźnienie. Do niedawna to był główny filtr który ucinał drgania silników.
Nie ma powodów, żeby wyłączać dynamic notcha, to bardzo skuteczne narzędzie. W większości przypadków wystarczy zostawić na defaulcie. Jeśli latacie whoopami, czy innymi toothpickami, to warto ustawić jego zakres na high, bo małe quady wyżej kręcą silniki.
12. Filtry środkowozaporowe oparte o telemetrię.
To jest najlepsza rzecz od wymyślenia cyjanoakrylu. Są to filtry oparte o telmetrię zwracaną do FC przez ESC. Dzięki temu FC zna konkretne obroty każdego silnika i może ustawić filtr na dokładną częstotliwość drgań które wytwarza każdy z silników (i najbliższe harmoniczne przy okazji). Tak zaimplementowany filtr ma nikłe opóźnienie (ułamki ms) i jest do bólu skuteczny. Kiedy widzicie całkowity brak drgań od silników po filtrowaniu, to praktycznie zawsze jest to ten filtr.
Przed tym dobrze filtrowany quad wyglądał tak:
Dodatkowo - z racji tego, że ten filtr zajmuje się silnikami , to dynamic notch pozostaje wolny. W efekcie to co normalnie robiłoby się filtrem dolnoprzepustowym, jak np drgania aerodynamiczne, tak teraz może się tym zająć filtr dynamiczny.
W efekcie możemy coraz bardziej rezygnować z filtrów dolnoprzepustowych i zyskiwać sprawniejsze filtrowanie oraz mniejsze opóźnienie.
No i jeden dodatkowy bonus. Nawet z urwaną łopatą quad lata prawidłowo. Tylko śrubki się rozkręcają
13. Opóźnienie, czyli po co się męczyć?
No właśnie, po co ta walka z filtrami?
Jeszcze rok temu prawidłowo wyregulowany quad miał koło 6-7ms opóźnienia pętli PID.
Dzięki przejściu na filtry dynamiczne mamy opóźnieniu rzędu 2,5ms, więc prawie 3x szybciej.
I od razu powiem - tu nie chodzi o nasz czas reakcji, na samych nadajnikach RC mamy pewnie z 10ms opóźnienia. Chodzi o to jak szybko quad może reagować na drgania, czy wytrącenia z równowagi. Szybszy czas reakcji oznacza, że lot jest płynniejszy, nie ma problemów z propwashem, a same silniki biorą mniej prądu (bo reagują mniej, a szybciej).
I teraz najważniejszy wniosek z tego wszystkiego - kiedy zrobicie sobie nowego quada, to zawsze zaczynajcie regulacje od filtrowania. Opóźnienie ma wpływ na to jakie PIDy można uzyskać. Jeśli zaczniecie od PIDowania to cała robota pójdzie do kosza.
Dlatego jak obejrzycie ten film:
https://www.youtube.com/watch?v=WhW_SZG3wY4To nie pytajcie o to jakie PIDy mam, że to tak płynnie lata. To kwestia filtrowania, później PIDów.
Tu jeszcze jedna ciekawa uwaga - w swoich konstrukcjach stosuje teoretycznie przewymiarowane silniki, bo ostatnio 2208. Celem nie jest dużo mocy, bo pełnego gazu używam bardzo, bardzo rzadko. Celem jest zmniejszenie czasu reakcji silnika na zmianę wysterowania. Większy moment skraca czas reakcji, robiąc dokładnie to samo co precyzyjnie ustawione filtrowanie.
No i ostatnia dygresja. Różnica opóźnienia między 4kHz taktowania pętli, a 32kHz to nędzne 0,21875ms. Przy opóźnieniu filtrów ładnie widać, jak bardzo bezużyteczne jest taktowanie pętli 32kHz. Ładnie wygląda tylko na materiałach marketingowych.
14. Sygnał dociera do pętli, i co? - czyli zaawansowane funkcje PID
No i problem zawsze będzie zawsze ten sam - niezależnie jak dobrze wypidujemy klasyczną pętle PID, tak zawsze quad będzie latał jakby miał luzy na układzie kierowniczym.
Będzie stabilny, będzie dobrze radził sobie z propwashem, ale będzie się prowadził luźno.
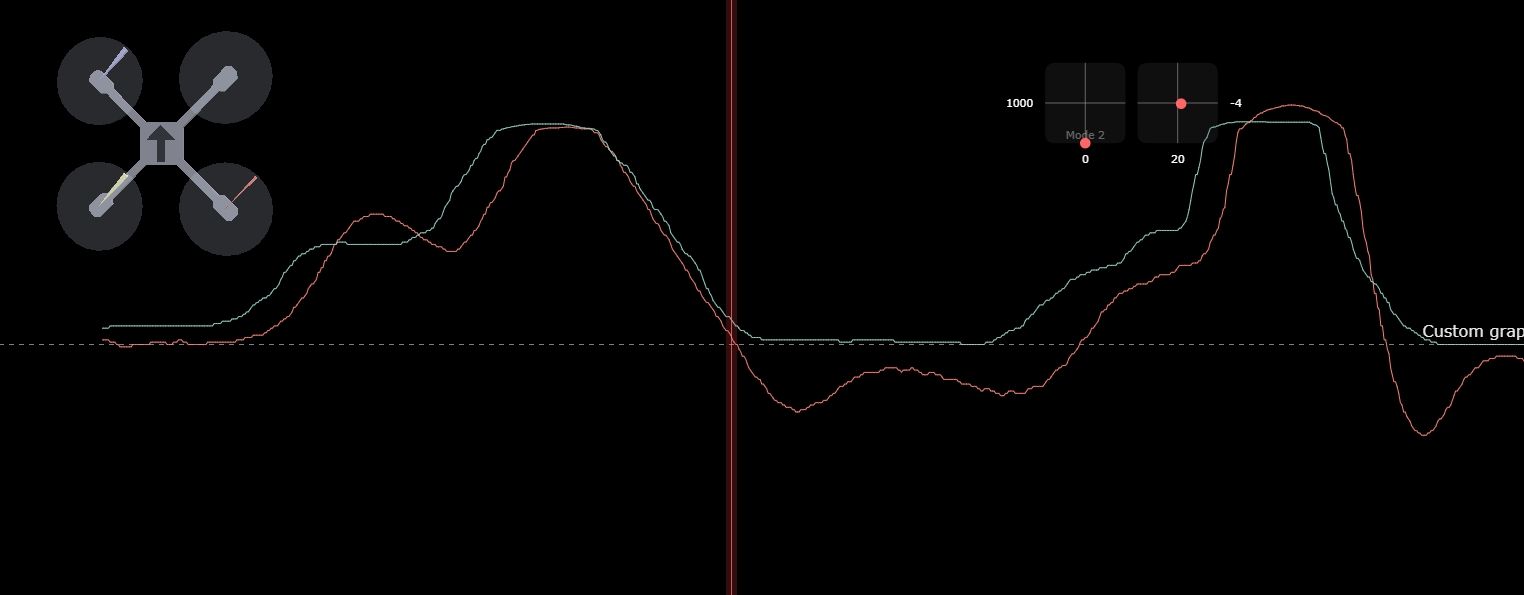
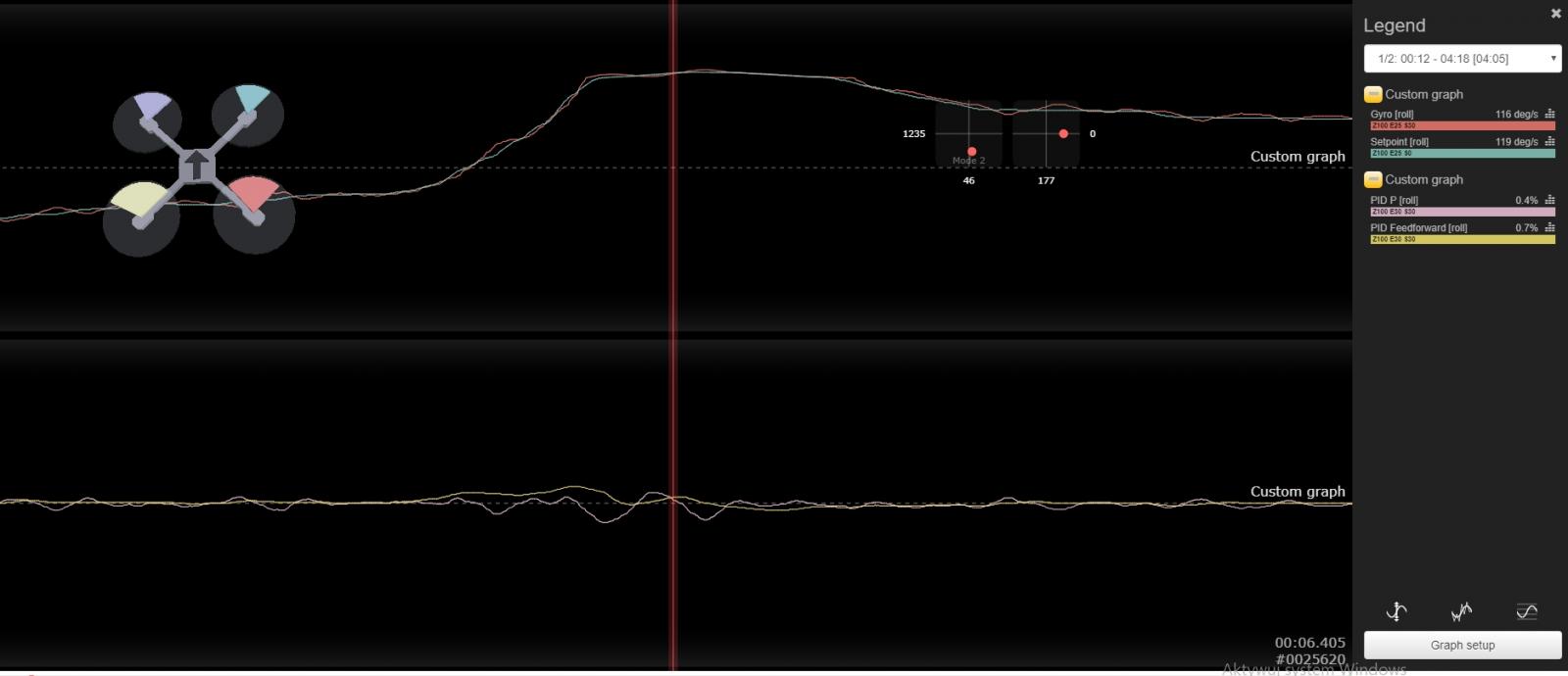
Wynika to z tego, ze klasycznie pętla PID zachowuje się tak:
Tzn - widzimy, że setpoint najpierw podąża w górę, a odczyt z żyroskopu jakby się musiał namyśleć i dopiero po chwili rusza za setpointem. Wynika to z tego, że przeszkadza nam bezwładność quada. Póki różnica nie jest duża, póty część proporcjonalna (a tym bardziej całkowa) nie wydaje mocnej komendy ruchu za setpointem. Aby walczyć z tym problemem
W tym celu powstał mechanizm zwany feed forwardem. Jest to mechanizm podawania komend do silników z pominięciem pętli PID. Tzn. kiedy poruszamy gwałtowanie drągiem w prawo, to automatycznie powoduje to wydanie komendy obrotu w prawo, bez czekania aż błąd wysterowania się pojawi. Siła tej komendy zależna jest nie tyle od wartości wychyłu drąga, co od dynamiki zmiany. Czyli mamy kolejną pochodną.
Fajnie jak to działa widać tutaj:
Widzimy, że odczyt żyroskopu praktycznie pokrywa się z setpointem, nie ma już opóźnienia. Fajnie też widać, że to właśnie feed forward odpowiadał za ruch. To on ma jednoznaczną tendencję nakazującą ruch, część proporcjonalna bardziej waha się wokół zera, pełniąc rolę stabilizacyjną.
Drugim fajnym zabiegiem stosowanym we współczesnych flight controllerach jest dynamiczna wartość wzmocnienia części różniczkowej.
Tzn. Obecnie podajemy dwie wartości D i Dmin. Tak naprawdę większość lotu robimy na wartości podanej dla Dmin. Wzmocnienie D wskakuje na docelową wartość, tylko gdy quad poczuje bardzo duże przyśpieszenia, albo gdy gwałtownie wychylimy drążek. Zapobiega nam to przelatywaniu quada przez setpoint (czyli np. ładnie hamuje po beczce, bez odbicia) oraz ładnie wycina nam drgania od propwashu. A dzięki temu, że większość lotu robimy na niskim wzmocnieniu części różniczkowej, to nie mamy problemu z przegrzewającymi się silnikami i innymi takimi przyjemnościami.
Ostatnim, powszechnie stosowanym mechanizem, jest obcinanie części całkowej. Tzn. w pewnych warunkach część całkowa tylko przeszkadza. W efekcie kiedy wykonuje się gwałtowne ruchy, to FC świadomie obcina nadmiernie aktywną część całkową. Zapobiega to np. miękkim odbiciom po szybkiej beczce. Mało emocjonujące, ale przydatne
15. To jak ustawiać te PIDy?
Przede wszystkim - liczę, że zdjąłem nieco aury tajemnicy z działania quada. Dla mnie - to właśnie konkretna wiedza spowodowała, że przestałem robić rzeczy na ślepo, a zacząłem robić coś świadomie, liczę że Wam też to pomoże.
Pamietać też trzeba, że PIDowanie nie służy do tego, żeby quad się przyjemnie prowadził. Quad ma dobrze realizować zadane setpointy. Kwestie prowadzenia dogrywa się później ustawieniami rate'ów. Np jak dobrze wyregulowany quad zbyt ślamazarnie reaguje, to trzeba podnieść RC rate'y żeby pierwsza część ruchu była bardziej dynamiczna.
Ale zróbmy teraz prosty algorytm:
1. Włącz dwukierunkowego Dshota. Niezależnie czy macie BLHeli-S, czy BLHeli-32 nie warto sobie tego żałować, różnice robi to nieziemską.
Instrukcje jak to zrobić znajdziesz np. tutaj:
https://www.youtube.com/watch?v=rawGQvMRzM4&t=507s2. Zrób lot testowy i zrzućcie log
3. Sprawdź wykres drgań linkowanym przez mnie Plasmatree
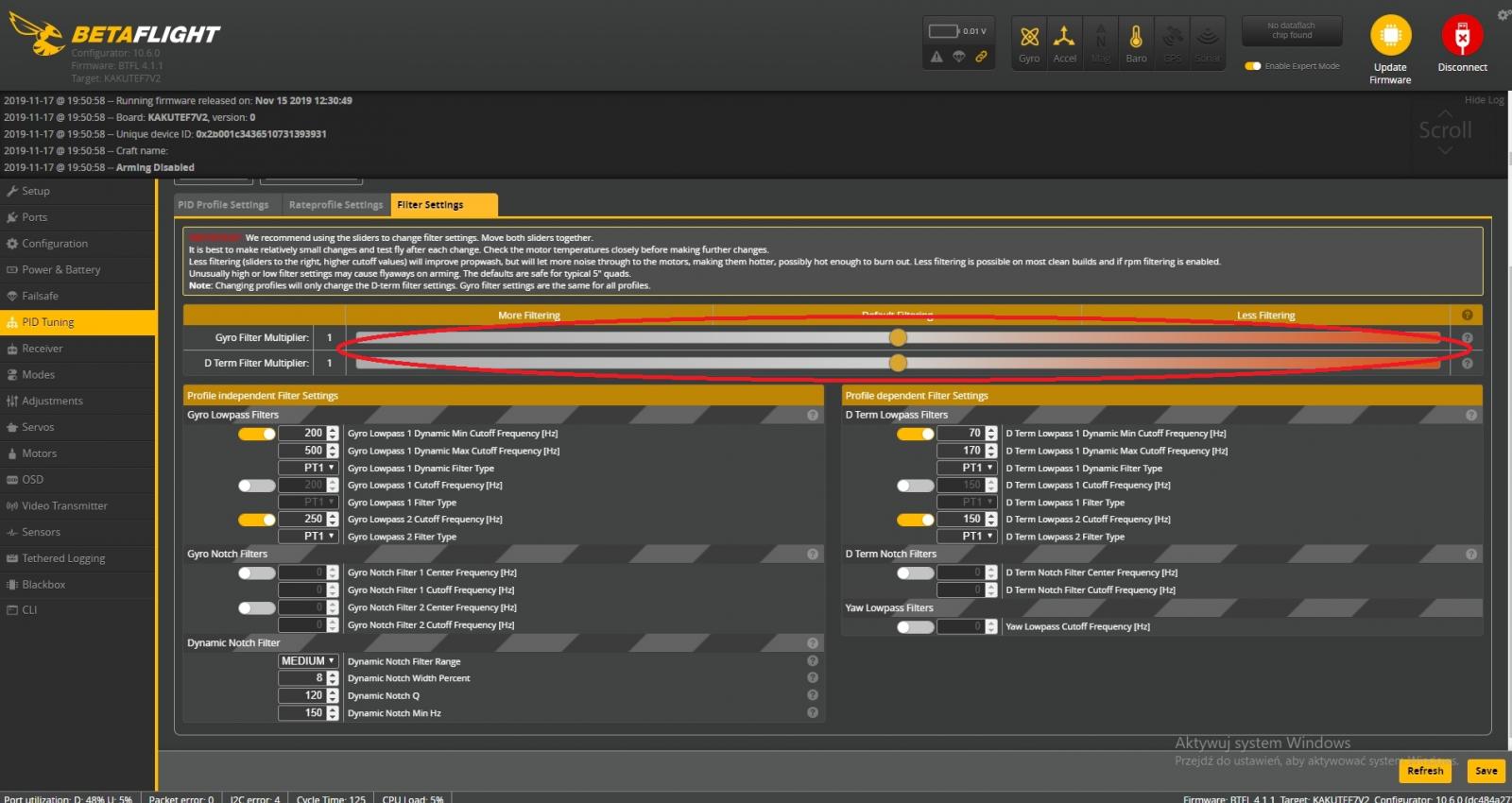
4. Jeśli filtrowanie wygląda ok, to przesuwaj te suwaki:
powoli w prawo (trochę prawo, sprawdzić czy silniki się grzeją i tak aż dojdziecie do gorących silników, albo do końca suwaków)
5.Kiedy to jest dograne to zrób zwyczajny lot i zrzuć log na komputer i zobacz jak wygląda realizowanie setpointów.
Jeśli żyro przelatuje przez setpoint, to znaczy, że masz za dużo P, albo za mało D (tak naprawdę to kwestia stosunku P do D)
Jeśli masz widoczne wibracje o stałej am0plitudzie to zmniejsz P
Jeśli masz wibracje o spadajacej amplitudzie, to za dużo D
A jeśli masz duże opóźnienie w reakcji na zmianę setpointu to podnieś Feedforward.
Feed forwardu ogólnie nie ma co się bać, nawet 300-400 nie robi krzywdy.
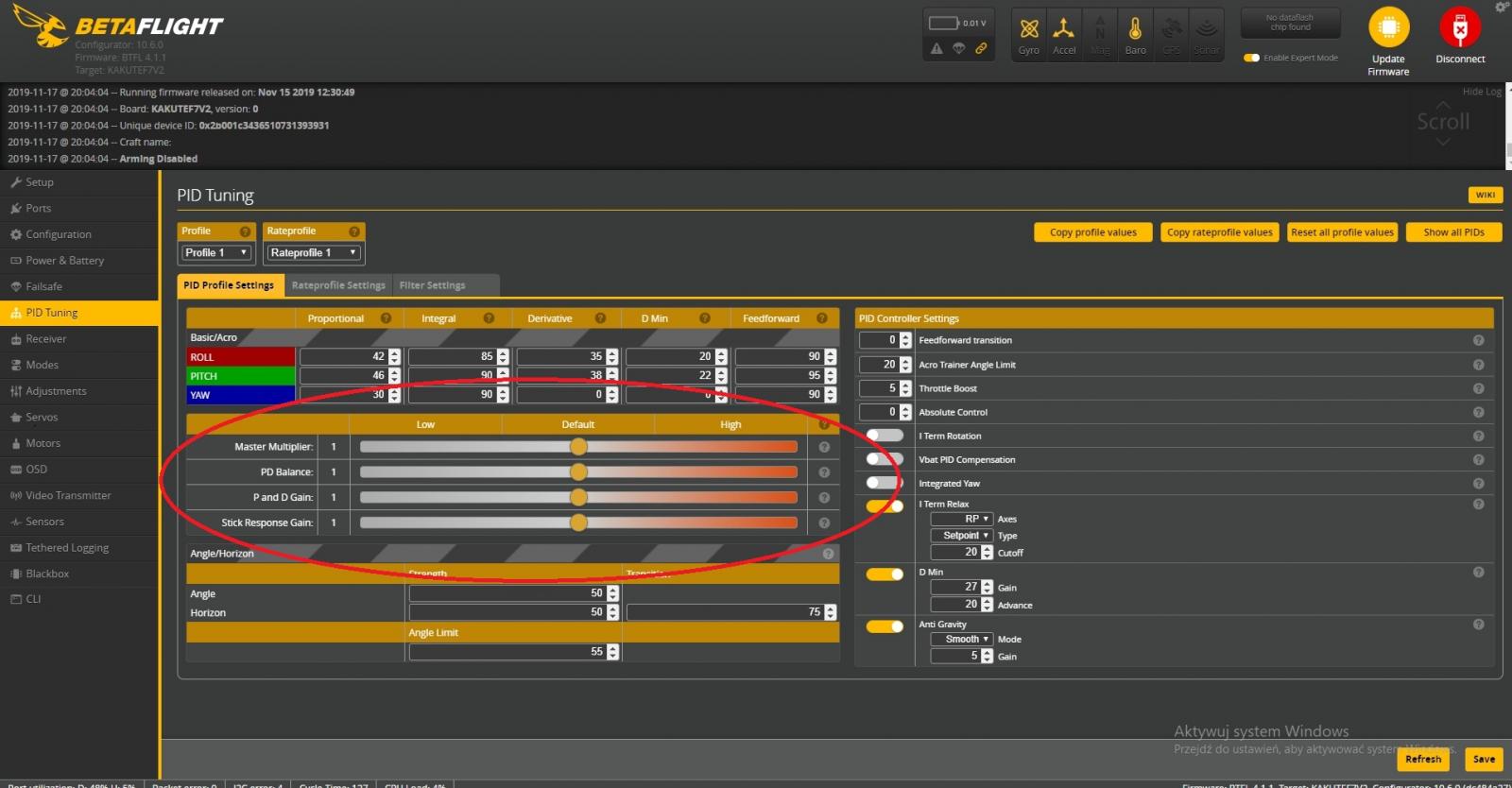
Dobrze robi się to suwakami:
ładnie też znaki zapytania opisują do czego to służy
6. Po tym etapie dobierz D_min tak aby zminimalizować propwash, a nie było problemu z temperaturą silników.
I to tyle. Jak masz spełnione powyższe warunki, to nie ma co dziubdziać PIDów. Tzn. Zmiany będą bardzo nikłe, na tyle, że nie będzie ich czuć w locie. Jak osiągniesz ten etap, to proponuje zająć się ustawieniami rate'ów. Często okazuje się, że dobrze wyregulowany quad, który dobrze realizuje setpointy zaczyna być nerwowy, bo reakcja jest szybka. Wtedy jedyne co trzeba to zmniejszyć rate'y.
I tyle
Jak coś to pytajcie -
4
-
 2
2
-
W zasadzie szybko bo szybko ale czuje się przekonany
rama na pierwszy ogień później reszta. A kamerkę to też wezmę tego predatora przyznam że 3 calowy wydawał się na pierwszy rzut oka bardziej spokojniejszy ... jak widać myliłem się Spoko Jarku nie mam za złe co do off topa
Ogólnie - poleciłbym Ci trzy cale, ale na razie nie ma silników do ultralekkich trzycalowych quadów. Do 2,5 chociaż jest dużo części
-
No dokładnie
Typowa 3" osiąga większe prędkości od 5" quada.
Ukuliśmy na lotnisko dla niech nazwę "quadów balistycznych", bo lata się tym nieraz jak kulą armatnią
Do latania na podwórku - zdecydowanie potrzebujesz coś co nie uszkodzi człowieka, czyli albo whoopa (na co to komu na podwórku), albo toothpicka.
Do tego polecam Ci skopiować mój setup: https://pfmrc.eu/index.php/topic/82433-zrobi%C5%82em-sobie-toothpicka/ , ale z poprawkami.
To co poelcam zmienić to:
Rama na iFlighta: https://www.banggood.com/IFlight-TurboBee-120RS-Plus-120mm-Wheelbase-2_5-Inch-3mm-Bottom-Plate-FPV-Racing-Frame-Kit-p-1532106.html?rmmds=search&cur_warehouse=CN - Ta moja ma naprawdę nedzny wydruk Jak nie chcesz się w to bawić to olej.Kamerę na: https://www.banggood.com/Foxeer-Nano-Predator-4-FPV-Camera-Solder-Pad-4ms-Latency-Super-WDR-for-FPV-Racing-RC-Drone-p-1558735.html?rmmds=search - Dlatego, ze zastosowany przez mnie Ratel jest jednak ciężkawy. Jedyny powód żeby go stosować, to chęć latania po nocy. A dlatego polecam Ci Predatora, bo Predator to moja absolutnie ulubiona dzienna kamera do quadów. Szczególnie na Twoich goglach, szybko będzie różne czepliwe rzeczy widać.
I silniki: https://www.banggood.com/IFlight-XING-NANO-X1103-1103-8000KV-10000KV-2-3S-CW-Thread-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1551371.html?rmmds=search&ID=528717&cur_warehouse=CN - ale to zmiana głównie kosmetyczna. Zastosowane Brothery są bardzo dobre.
I do tego śmigła 2,5" trójłopatowe + pakiet 3s 300mAh.
-
1
-
-
Czy zrobię problem?
Oczywiście, że zrobię problem
Odpowiedz mi na pytanie:
Do czego potrzebujesz 3"?Tzn. Czy chcesz mieć szybkiego i głośnego quada, którym można latać w tych samych miejscach co 5tką, czy chcesz coś do bezpiecznego, do latania w mniejszej przestrzeni?
-
A chciałem nawet pisać o tym...
Dostałem wczoraj maila, że producent jest obłożony do końca roku, a później idzie na emeryturę...
Jeszcze nie wymyśliłem co zamiast Driftera wezmę...
-
Tak podepnę się trochę do wypowiedzi.
No moja Runcam5 przyszła właśnie dzisiaj:) Pierwsze testy odbyły się z ręki w pracy. Jak puściliśmy nagranie na kolegi laptopie to straszne lagi miały nagrania. Już myślałem ze to wina kamery ale jak w domu odtworzyłem nagrania na kompie to już wszystko było ok(kumpel musi wymienić laptopa). Wieczorem zamontowałem kamerę na samolot i polatałem, przed chwilą skończyłem właśnie latać. Obejrzałem nagranie i tu mnie ogarnęło zdziwienie. Latałem już w nocy na obrzeżach miasta i moja kamera FPV(runcam eagle 2 pro) łapie o wiele więcej światła w nocy i więcej widać na tych nagraniach. Jak ścigałem w nocy pociąg to wyraźnie go było widać, a przy runcam5 ledwo co widać światełka. Może jeszcze coś w ustawieniach pozmieniam i pomoże. Następne testy odbędą się jak będzie jeszcze słoneczko:)
Standard. Kamery HD Runcama już tak mają...
Niemniej - Eagle (szczególnie w formacie micro) to przeciwny biegun, który działa niemal jak noktowizor:
https://www.youtube.com/watch?v=RUkAxB08a5E
Tutaj latam na nieoświetlonym placu, gdzie na żywo nic nie widziałem.
-
Dzięki za miłe słowa
A tak mnie jeszcze naszło - może ktoś jest chętny na materiał opisujący od czego zależą osiągi quada?
Tzn. po co to całe PIDowanie, filtry itp?
Bo mogę napisać, ale jak nikogo to nie interesuje, to szkoda mojego czasu
-
1
-
-
Ta antena to 6dBi a taka wewnątrz to pewnie 2-3dBi więc powinno być lepiej . Zaszkodzić na pewno nie zaszkodzi.
Ale wiesz, że większy zysk anteny to nie znaczy, że masz większy zasięg za darmo?
Większy zysk oznacza, że antena promieniuje pod coraz węższym kątem. W przypadku dipoli (a tym są baciki), to większy zysk oznacza, że masz coraz bardziej spłaszczony dysk w jakim antena nadaje.
O ta wypowiedź wyżej już mi się podoba.
bałem się czyc nie będzie przeciążone lub coś podobnego. A moda chcę zrobić dla jakości sygnału. W fpv latałem na bacikach. Jakość czasami do niczego. Poszły koniczynki i wszystko znikło. Od razu lepiej.To też tak nie działa.
Zastosowanie koniczyn w miejsce bacików poprawia jakość obrazu ze względu na wyeliminowanie odbić (odbicie obraca kierunek polaryzacji kołowej i przez to nie są one odbierane przez odbiornik).
RC jest systemem cyfrowym, nie jest już tak czuły na odbicia, bo od tego jest suma kontrolna i odrzucanie błędnych pakietów.
Jedyna metoda zwiększenia zasięgu to antena kierunkowa, ale to wiąże się ze swoim zestawem problemów.
-
2
-
-
Czołgiem Panowie
Od zawsze (czyli od roku, bo tyle się quadami zajmuję) chciałem mieć małego quada do latania w różnych miejscach.
Problem był tylko jeden w tym wszystkim - quady na tyle lekkie, że nie stwarzające niebezpieczeństwa latały zwyczajnie źle.
Oczywiście może ktoś powiedzieć, że ma Emaxa Tinyhawka S i lata mu to ok, ale to jednak nie te progi. Chybotliwe to, przysiadające w zakrętach i nieprecyzyjne.
W efekcie gdybym zrobił sobie takiego quada, to wiele bym na nim nie poćwiczył, po prostu polatałbym w kółko między drzewami.
Ostatnio zaczęły pojawiać się jednak quady klasy toothpick, które już latały jako tako. Tzn. wciąż nagrania z dvrek są nieco chybotliwe, ale to już wyglądało jak coś z czym da się powalczyć.
Twórcą tej klasy jest Kabab FPV i jego konstrukcja latają już naprawdę zacnie. Problem jest tylko taki, że jego styl latania opiera się na szybkim lataniu na silniku, praktycznie nie bawi się figurami opartymi o swobodny spadek, czy rzuty.
Nie ma w tym nic złego oczywiście, ale ja preferuję latać trochę inaczej, więc postanowiłem nie kopiować jego konstrukcji i ograć temat po swojemu.
W tym celu zaopatrzyłem się w sprzęt:
Rama - https://www.banggood.com/URUAV-UR12-Pro-115mm-Wheelbase-Carbon-Fiber-2_5-Inch-3-Inch-Frame-Kit-for-RC-Drone-FPV-Racing-p-1568382.html?rmmds=myorder - wybrana za możliwość zamocowania trójcalowych śmigieł. Zawsze opcja do eksperymentów.Silniki - https://www.banggood.com/BrotherHobby-Returner-R3-1103-8000KV-11000KV-1-2S-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1490800.html?rmmds=myorder - Lubię Brotherhobby, a to są zwyczajnie dobre silniki. Wolałbym Xingi w tym samym rozmiarze, bo bardziej mi się podobają, ale na BH będzie latać tak samo, a Xingów akurat nie było
FC - ESC - VTX - https://www.banggood.com/IFlight-V1-SucceX-F4-Flight-controller-OSD-12A-Blheli_S-2-4S-Brushless-ESC-5_8G-25100200mW-VTX-16x16mm-p-1438743.html?rmmds=myorder - 16x16mm stack ze wszystkim. Niestety BLHeli-S, ale i tu coś poradziłem
Kamera - https://www.banggood.com/Caddx-Ratel-11_8-Starlight-HDR-OSD-1200TVL-NTSCPAL-16943-Switchable-1_66mm2_1mm-Lens-FPV-camera-For-RC-Drone-p-1436688.html?rmmds=myorder - a to nietypowy wybór. Typowe kamery do tej klasy to kamery w rozmiarze nano. Zdecydowałem się poświęcić te 4g wagi na rzecz pracy w nocy. Ratel ma legendarne własności przy pracy przy sztucznym oświetleniu, wciąż pozostając fantastyczną kamerą w dzień.
Odbiornik - https://77hobby.pl/frsky-r9-mm-ota-odbiornik-dalekiego-zasiegu-416ch-z-telemetria-p-293.html - Wybrany dlatego, że jest mały i lekki, a kiedy latam wokół jakichś dziwnych betonów to 2,4GHz potrafi znienacka wyciąć. Przy R9 czuję się zwyczajnie pewniej.
Antena VTX - Jakieś Vee od Actuny. Akurat leżała w sklepie jak byłem.
Całość dotarła do mnie w czwartek i zacząłem montować.
Oczywiście okazało się, że drukowana kabinka nie pasuje ani do zastosowanego stacku (jest zbyt wysoki), ani do zastosowanej kamery (jest do kamery w rozmiarze nano). Sam montaż był bardzo męczący. Szczególnie, że spaliła mi się stacja lutownicza i te maleńkie pola lutownicze musiałem lutować za pomocą lutownicy transformatorowej (z grotem z kabla koncentrycznego).
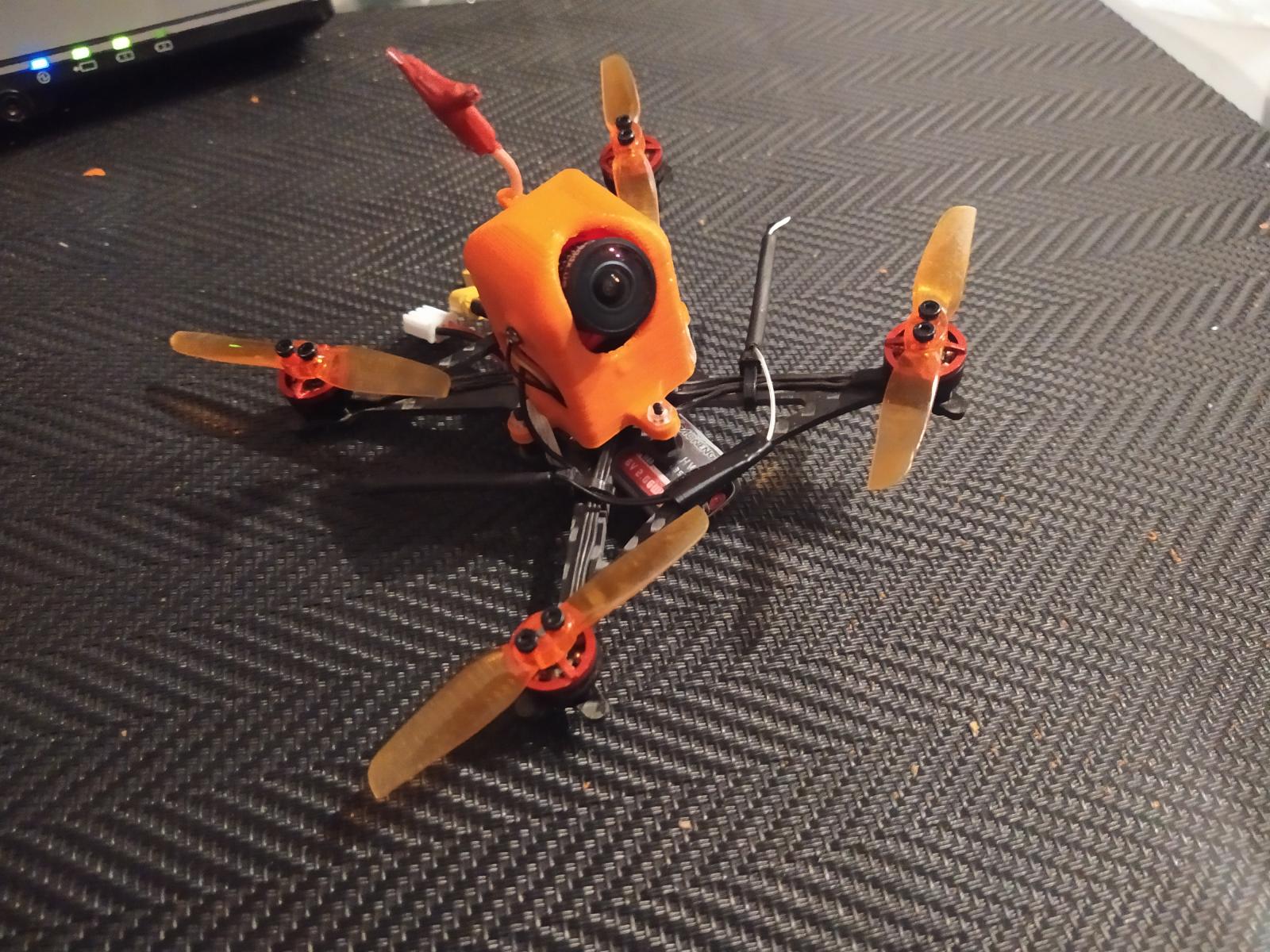
Niemniej - z kabinką mojego projektu i zmontowany prezentuje się tak:
I rozmiar w porównaniu z quadem 5"
Całość zadziałała z grubsza od razu.
Miałem przeboje głównie z telemetrią FrSky'a. W tym FC nie da się zastosować SmartPorta i SBUSa, bo zwyczajnie brakuje UARTów. Zdecydowałem się więc puścić całość po FPorcie który wymaga jedynie jednego portu Tx i gwarantuje i telemetrię, i sterowanie. Niestety nie udało mi się zmusić telemetrii do działania, najprawdopodbniej wynika to z tego, że na porcie Tx produent FC zastosował jednokierunkowy inwerter. Wybaczam i rozumiem, miejsca tam praktycznie nie ma.
Później okazało się, że z racji umieszczenia odbiornika R9 sprasowanego między kamerą, a VTxem, to nawet podstawowa telemetria (czyli RSSI i napięcie zasilania odbiornika) powoduje problemy. Tzn. wrzuca na obraz przeźroczyste pasy.
Koniec, końców zbindowałem, więc odbiornik bez telemetrii, dzięki temu video jest idealnie czyste. Trochę żal skryptów LUA, ale jakby co to mam menu OSD do ustawiania PIDów, przeżyję.
Po tym poszedłem całość oblatać i wynik był całkowicie przewidywany.
Tzn. na defaulcie quad lata jak ściera. Próby zaś PIDowania kończyły się chęcią wyprawy quada na księżyc, zaraz po uzbrojeniu.
Problem był spodziewany - tzn. tak wysoki współczynnik D, który gwarantowałby opanowanie czegoś o tak małej bezwładności, momentalnie wzbudzał się od syfu przechodzącego przez filtry. Z kolei próby zwiększenia filtrowania kończyły się takim wzrostem opóźnienia, że quad wciąż się chybotał (ale choć silnik miał zimne
)To było przeze mnie spodziewane już w momencie, kiedy brałem się za dobór części, więc miałem rozwiązanie.
Ostatnimi czasy pojawiło się rozwiązanie pozwalające na uruchomienie dwukierunkowego DSHOTa przy ESC wyposażonych w BLHeli-S
Szczegóły znajdziecie tu:
https://jflight.net/index.php?route=information/information&language=en-gb&information_id=7I tak - trzeba wydać 5USD na cztery regle. Ale, raz że to niewiele, dwa że pieniądze idą do kieszeni twórcy podwalin pod dwukierunkowego DSHOTa w BFie. Absolutnie nie szkoda mi oddać mu tych paru groszy, należy się jak psu buda.
Samo wrzucenie JESC poszło bezboleśnie, a telemetria zadziałała bez zarzutu.
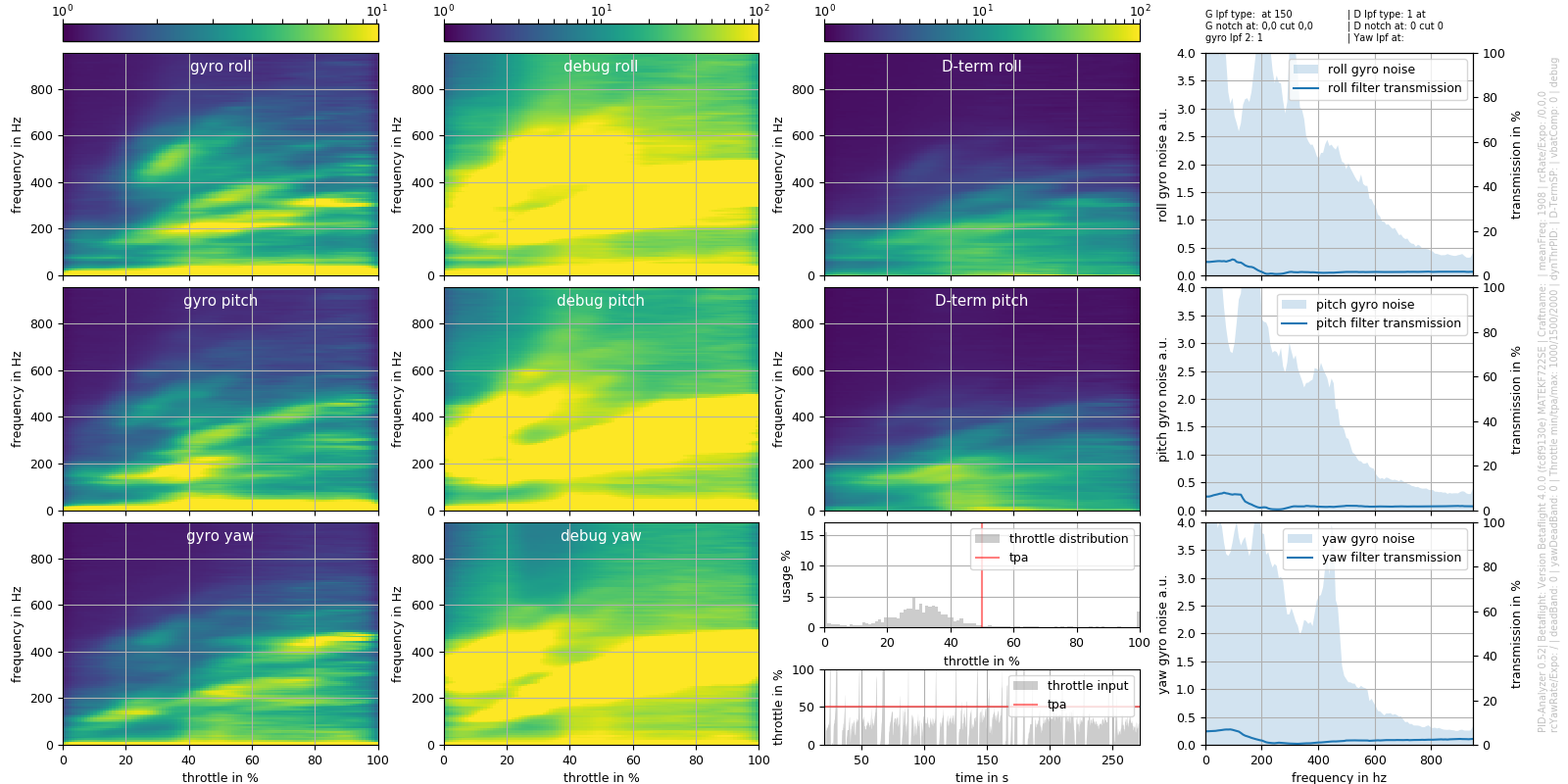
To pozwoliło zrobić już bardzo konkretny setup filtrów. Tzn. wyłączyłem wszystkie filtry dolnoprzepustowe poza filtrami dynamicznymi, a i tym podniosłem częstotliwości dwukrotnie. W efekcie opóźnienie filtrowania jest na poziomie około 2ms (czyli praktycznie minimalne), a dzięki filtrom RPM skuteczność filtrowania prezentuje się tak:
Jak widać - filtrowani wycina cały syf.
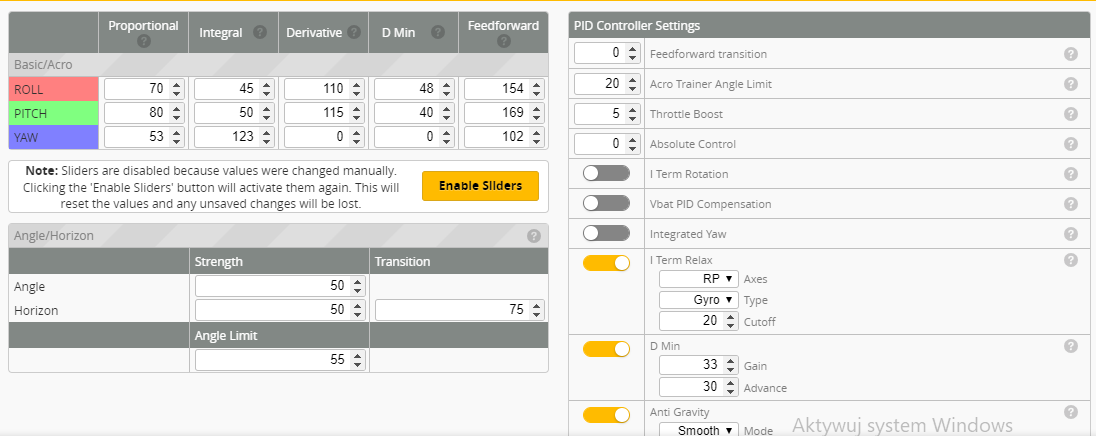
Dzięki temu - mogłem w końcu ustawić sensowne PIDy:
Jak widzicie - bardzo mocno dominuje tu część różniczkowa i feed forward.
Idea jest taka, że feed forward momentalnie rozpędza quada za ruchem drążka (tzn. klasycznie za rozpoczęcie ruchu odpowiada część proporcjonalna pętli PID. Część proporcjonalna reaguje jednak dopiero na zaistniały błąd, proporcjonalnie do jego wartości, powoduje to, że reakcja jest opóźniona i kiedy quad już się rozpędzi to ma tendencję, żeby przestrzelić ruch). Z kolei wysoka wartość części różniczkowej bardzo gwałtownie hamuje quada i bardzo ostro reaguje na propwash.
Drugą częścią zmuszenia quada do latania po mojemu była kwestia swobodnego spadku, rzutów etc.
Przy tak małych quadach po zdjęciu gazu momentalnie traci się pęd. W sporej części wynika to ze stosunkowo wysokich obrotów przy jałowej przepustnicy. Wynika to z tego, że małe silniki nie grzeszą momentem i trzeba poziom zerowy trzymać wysoko, żeby uniknąć desyncu i gleby.
W BF 4.1 znazła się funkcja Dynamic Idle:
https://github.com/betaflight/betaflight/wiki/Tuning-Dynamic-IdlePolega ona na tym, że pozwala sterować nie tyle wartością wysterowania przy zerowej przepustnicy, co bezpośrednio obrotami silnika. Dzięki temu można bezpiecznie ustawić sporo niższe obroty, bo nawet gdy quad napotka wsteczny ruch powietrza, to FC podniesie poziom wysterowania, tak aby utrzymać żądane obroty.
W gratisie poprawia to też reakcje w zerze gazu, bo FC może nie tylko podnieść obroty, ale też je obniżać. Dzięki temu sterowanie kierunkowe przy zerowej przepustnicy nie powoduje wzrostu ciągu i nie hamuje tak rozpędzonego quada.
Efekt tych mocowań się z materią możecie zobaczyć tutaj:
https://www.youtube.com/watch?v=W0PZ7Ohu4S0Musicie wybaczyć jakość. Do dyspozycji jest tylko DVRka, ten quad nie weźmie na pokład kamery HD.
Pomijając całe to techniczne ględzenie - wrażenia z latania są super.
Tzn. prowadzi się to super płynnie. Quadzik idealnie chodzi za drążkiem, pozwala wykonać rozsądną pętle. A mimo tego jest absolutnie nieuszkadzalny i całkowicie bezpieczny (przetestowałem na sobie. Bycie walniętym tym quadem przy pełnej prędkości nie jest może przyjemne, ale nie jest w stanie zrobić krzywdy. Śmigła się wtedy zatrzymują a całość jest na tyle lekka, że nawet siniaka nie nabije).
Obecnie waży toto 72g do lotu z pakietem 2s 350mAh HV. Taka konfiguracja zapewnia około 4min lotu tempem jak na powyższym filmie. Powolniejsze latanie niewiele zmienia, pakietu starczy wciąż na około 4min.
Zastosowany VTx wystarczy w 100%, można na solidny kilometr odlecieć i wrócić, bez utraty zasięgu (a i to mimo tego, że na goglach mam antenę z polaryzacją kołową, a w quadzie liniową).
Niemniej - przydałoby się nieco więcej mocy. Mam też wrażenie, że z 10g więcej na pokładzie by pomogło.
Dlatego przetestuje jeszcze śmigła trójłopatowe i pakiet 3s 300mAh.
Ale to już na spokojnie, już teraz lata świetnie
Ogólnie - polecam tę klasę quadów każdemu, świetna zabawa, a koszta niewielkie
-
4
-
-
MPU 600 to stary typ żyroskopu, ze statusem end of life od prawie zawsze.
Pozwala na maksymalnie na próbkowanie danych z częśtotliwością do 8kHz
MPU 6000 to zawsze było tyle dobry żyroskop, że był bardzo odporny na różnej maści syf elektryczny.
Z kolei ICM 20689 to pierwszy żyroskop InvenSense który powstawał z myślą o zastosowaniach również w kontrolerach lotu.
Pozwala on na odczyt danych z częstotliwością próbkowania do 32kHz.
Niestety jest on bardziej czuły na zakłócenia elektryczne i sprawia więcej problemów projektantom płytek.
Rzecz polega na tym, że obecnie Betaflight całkowicie porzucił wsparcie dla częstotliwości taktowania pętli PID wyższej niż 8kHz, bo taktowanie na 32kHz okazało się ślepą uliczką (mogę napisać kiedyś jakie znaczenie ma częstotliwość taktowania pętli i dlaczego 32kHz to ślepa uliczka, ale to na życzenie. Sporo pisania jeśłi nikogo to nie interesuje).
Ogólnie - MPU6000 jest lepsze dla naszych celów, dlatego nowsza wersja Kakute F7 lata już na takim.
NIemniej - ICM 20689 nie ma co się bać, też będzie latał lepiej. Problemy sprawia raczej projektantom FC niż nam.
-
Co nie zmienia faktu że na ulicach jest coraz więcej chamstwa niż było to np 30 lat temu.
Pomimo kar mandatów ludzie chleją alkohol wsiadają za kierownice, w najgorszym przypadku
mordują ludzi swymi pojazdami. Nie wspomnę o tych trzeźwych którzy też dla podniesienia
swojego ego traktują ulicę jak swego rodzaju rodeo. Można by się tak przepychać przykładami.
W dużym skrócie - nie.
Przemocy jest coraz mniej. Ma po prostu dużo więcej czasu w mediach.
Żeby nie być gołosłownym:
https://slides.ourworldindata.org/war-and-violence/#/title-slide
Ale nie o tym chciałem.
Czarek, Przemek - szacun za robotę.
Jeśli potrzebujecie kolejnej osoby, piszcie macie mój czas.
















Jakimi shockflyerami teraz się lata?
w Parkflyer, slowflyer,shockflyer
Opublikowano
Hej Panowie
Więc temat wygląda tak - po 10 latach zachciało mi się wrócić do shockflyerów (głównie dlatego, że mój Toothpick lata na pakietach typowych dla shockflyerów)
W tym celu poskładałem sprzęt - 4 serwa 3,7g, silnik ze starego quada, regler ze starego quada i ultralekki odbiornik.
Pojechałem do Castoramy, kupiłem sobie biały depron 3mm i nie znalazłem sensownych planów...
Poszedłem więc na łatwiznę i kupiłem sobie coś takiego:
https://www.topmodelcz.cz/index.php?&desktop_back=eshop&action_back=zbozi_detail&id_back=1036&desktop=eshop&action=zbozi_detail&id=677
Bo taki czeski, ładny i kolorowy.
Tyle, że nie zauważyłem, że to ma bite 880mm rozpiętości, będąc dwupłatem. Innymi słowy - to nie model sprzed 10 lat, a bliżej sprzed 13.
Czyli bliżej 24mk2.1, niż takiego Yaka od Krzyśka Halickiego.
W efekcie - waży mi toto 220g do lotu, obciążenie powierzchni nośnej ma żadne i jest miękkie, i podatne na uszkodzenia.
Pokręcę sobie tym beczki po okręgu przez dwa miesiące i model pewnie zmięknie na tyle, ze nie będzie mi się chciało nim latać.
Stąd pojawia się do Was pytanie:
Czym się teraz aeromusical lata? Zdecydowanie preferuje plany, niekoniecznie mam ochotę się bawić w zestawy, bo mam tą paczkę depronu za szafą
Tzn. Nie interesują mnie modele pokroju Clicka F3P, bo choć to dobry model, to nie tego szukam, za mało to dynamiczne.
Szukam czegoś właśnie w styly Yaka Krzyśka Halickiego, bo ze wszystkich shocków które miałem, ten był najlepszy. Jeśli od tego czasu nie wymyślono nic nowego, to plany tego Yaka też byłyby spoko.
A i preferowana konstrukcja to kadłub krzyżak, większość depronowa, dużo węgla i tylko ryjek z EPP. Modele całe z EPP są dosyc miękawe dla mnie, więc raczej odpadają.