






Patryk Sokol
-
Postów
3 201 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
78
Odpowiedzi opublikowane przez Patryk Sokol
-
-
Patryk, a czy Ty przeczytales pierwszy post tworcy watku? Bo ja odnosze wrazenie, ze raczej nie, albo niezbyt uwaznie.
Przyznaję, po prostu zobaczyłem Wichekra w dziale "Od czego zacząć" i mi adrenalina podskoczyła.
Moja wina
Ale jak Jacek chce pociągnąć temat to sprawa jest prosta.
To nie jest istotne, że kiedyś tak było dobrze.
Istotne jest, to że drewniaki robi się długo, są delikatne i zostawiają dużo miejsca na błąd.
I nawet pół biedy kiedy ma się kolegów na lotnisku co pomogą, gorzej kiedy walczy się samemu i nie wie się czy problemy wynikają z braku umiejętności pilotażowych
Tymczasem pianka po prostu lata. Zawsze, bo każda jest taka sama.
Dobrze znosi lądowania łatwo się naprawia, kosztuje mniej itp.
I nie jest istotne jaki kto będzie miał drugi model, może być każdy , ale latać najlepiej się uczyć na czymś tanim i kretoodpornym.
I sam uwielbiam drewniaki i laminaty, jednych i drugich narobiłem dziesiątki, ale o te modele trzeba dbać, a Twinstara to nawet nie wyciągam z auta.
-
 4
4
-
-
Co Wy kombinujecie...
Wicherki, Pipiery i cholera wie co jeszcze.
Albo jak pisze Robertus - ESA, albo jakiś Easy Star, Beta, czy coś pochodnego.
Nauka latania na jakimkolwiek drewnie to totalna porażka w tych czasach.
Prościej kupić kawałek pianki i tłuc do skutku. Nie ma nic gorszego niż długie odstępy między lotami na początku.
I żeby nie być gołosłownym - ja sam długo walczyłem z jakimiś drewnianymi Wilgami, trenerkami, etc. ale latać się nauczyłem dopiero na Delcie MJ (jakoś 15 lat temu). Już wtedy nauka latania na drewniaku była porażką.
-
Phi łódki...
Wydaje 100-200zł miesięcznie na śmigła

-
Witam
Podłącze sie do tego tematu. Chodzi mi o przebudowe tego quada QAV-X 214mm, silniki: 4xTarot MT2204II 2300kV, ESC: 4xSkyRC BLHeli Nano 20A Oneshot, FC: NAZE32 REV6 10DOF, RX:FrSKY XM+, Eachine 520 TVL VTX.
Kilka pytań do Patryka:
1) Rame chciałbym zostawić, jaki FC na F7 bys polecił, oczywiście z PDB?
2) Jakie ESC na DSHOT
3) Jakie silniki, myslałem o tych T-Motor, ale troche drogie
4) Jaka kamerka, VTX i anteny? Gogle mam jakies noname podrobki EV800.
Pozdrawiam
Hmmm.... Taka chudawa ta bestia., może warto pójśc w stronę regla 4-in1?
Niemniej gdybyś nie chciał iśc w stronę 4-in1 (ja np. nie chcę. W ten weekend jeden z regli po prostu się spalił. Gdyby to był 4-in-1 to byłoby 4x drożej) to polecam tak:
Co do FC:
Dobry, sprawdzony itp - https://www.banggood.com/Matek-System-F722-SE-F7-Dual-Gryo-Flight-Controller-w-OSD-BEC-Current-Sensor-Black-Box-for-RC-Drone-p-1379603.html?rmmds=search
Ale ostatnio pojawiło się coś takiego:
Nie ma wprawdzie PDB, więc raczej do regla 4-in-1, ale ma za to dwa żyroskopy pracujące w tandemie (tzn. Matek też ma dwa, ale używasz albo jednego, albo drugiego). To powoduje, ze można wyciąć szumy elektryczne bez wzrostu opóźnienia (nie cytujcie mnie jeszcze, prawdopodobnie CPU przeprowadza operację częśi wspólnej Boole'e, co powoduje, że jako sygnał przechodzą dalej jedynie wskazania zgodne (wynikające z żyroskopu), a odrzucane są różne (bo szum elektroniczny każde żyro ma własny))
Niemniej - to raczej dla różnego rodzaju fetyszystów, albo eksperymentatorów, jeśli preferujesz prostszy FC z PDB to zdecydowanie Matek.
ESC - linkowane wcześniej UFO FPV. Dają chłopaki radę
Silniki - jak wcześniej. Albo TMotory w Polsce, albo Emax Eco - https://www.banggood.com/Emax-ECO-Series-2306-6S-1700KV-4S-2400KV-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1415430.html?rmmds=search
Zdecydowanie nie ma co szarpać się o złotówki na silnikach, bo jeden wymieniony już różnicę zniweluje.
Kamerka ma tylko dwie odpowiedzi.
Zdecydowanie najfajniejszy jest Runcam Eagle - https://www.banggood.com/RunCam-Eagle-2-Pro-Global-WDR-OSD-Audio-800TVL-CMOS-FOV-170-Degree-16943-Switchable-FPV-Camera-p-1209504.html?rmmds=search
Lub w wersji mikro - https://www.banggood.com/RunCam-Micro-Eagle-11_8-CMOS-800TVL-Global-WDR-16943-Switchable-FPV-Camera-for-RC-Drone-p-1259121.html?rmmds=search
Jeśli chcesz przyoszczędzić to Runcam Swift też jest bardzo fajny:
Niemniej - Jakość obrazu w Runcamie Eagle jest wręcz uzależniająca
Często zamiast latać freestyle to robię sobie kółeczka i podziwiam widoki.
Mimo to stricte użytkowo to Swift zapewnia podobną widzialność, rozróżnianie szczegółów etc.
VTX - W tym modelu coś do stacku, żeby łatwo było umocowac. Tutaj dobrze dogaduję się z Atlatlem - https://avifly.pl/pl/nadajniki-fpv-vtx/holybro-atlatl-hv
Ale jeśli nie chcesz latać za betonowymi ścianami, to szczerze nie warto ładować się w taką moc, bo to potrafi pociągnąć problemy za sobą.
Jeśli chcesz tylko latać krzakowy freestyle na 2,4GHz to spokojmnie wystarczy Panda RC - https://avifly.pl/pl/nadajniki-fpv-vtx/panda-mini-5804
Anteny zaś mają tylko jedną odpowiedź - www.prodrone.pl (a w dużym skrócie - bardzo tanie, dobrze zestrojone, solidne i dobrze wykonane)
Ale tu już się nie będę mądrzył, porozmawiaj z twórcą anten. Bardzo rzeczowy i pomocny człowiek, lepiej doradzi ode mnie
-
Hmm, to faktycznie straszna lipa.
Tak googlając ten nadajnik i odbiornik, to wygląda jak całkowiecie ślepa uliczka.
Zdecydowanie polecam zainwestowanie w Taranisa:
https://77hobby.pl/frsky-taranis-q-x7-p-180.htmlLub w wersji naprawdę minimum we Flysky'a FS-i6 z którymś odbiornikiem wyposażonym w wyjście (i w sumie wejście, bo to full duplex) IBUS.
-
Nie ma typowej tarki, ale też ma przefrezowania, które robią dokładnie to samo.
Uwierz mi, to naprawdę nie jest żaden problem.
Jeśli zaś chodzi o sterowanie to tego nie przeskoczysz. Obecnie większość FC nie posiada już nawet wejścia PPM, a co dopiero PWM.
Powiedz lepiej jaki system RC używasz to znajdziemy Ci odbiornik i będzie działać.
-
1. Co do FC to okej. Ciekaw jestem jak on wypada w stosunku do https://avifly.pl/pl/kontrolery-rc/fc-matek-f405-std- bo też czytałem o nim dobre opinie.
2. Co do ramy to mam najwięcej wątpliwości. Spotkałem kiedyś na lataniu kolegę, który miał 2 drony na proponowanej przeze mnie ramie i sobie je chwalił. Jak my zaproponowałem żeby zrobił crash test, to najpierw z całej mocy walnął w skarpę, a potem na 50 metrach wyłączył silniki. Nic się nie stało. A ta co Ty podlinkowałeś to wogóle jest 215mm... A ja chciałem 250. Poza tym ona wymusza jakiś dziwny krzywy montaż kamer...
3. Co do silników to okej, chyba wszystko jest dobrze. No może poza ogromnym już poborem prądu
4.Co do regli to okej, te droższe mogą być, poza tym, że mają 30A, a silniki 36A. To chyba trochę za mało?
5. Prosiłbym Cię jeszcze żebyś tak jakieś linki, albo sam wyjaśnił dokładnie jak to jest z tą tarką. Jak to działa? Czy jest to równie bezpieczne jak CW i CCW?
1. Tym się różni, że nie ma PDB. Lepiej brać od razu z PDB.
2. Ta ram jest znacznie lepsza od tego szrota. Jak kolega ją chwalił, to musi tymi quadami latać bardzo rekreacyjnie, inaczej już sam rezonans by mu popsuł zabawę
I samo mocowanie kamery nie jest "jakieś krzywe" tylko masz zwyczajnie uptilt. W quadach daję się kamerę do góry, żeby widzieć gdzie się leci, kiedy leci się do przodu. Żeby latać bez uptiltu to musisz bardzo wiedzieć co robisz (zobacz sobie filmiki Johby'ego FPV), albo calkowicie nei wiedzieć co robisz.
3. Olej ten pobór prądu. To nei jest tak, że będą więcej ciągnąć mocy non stop, po prostu można mocniejszego punch-outa zrobić
4. Olej tę kwestią. 4x30A to już 120A żaden pakiet nie odda Ci tyle w pracy ciągłej
5. https://avifly.pl/pl/silniki-do-dronow/brotherhobby-returner-r6-2207 Tu na zdjęciu widać tarkę na którą nakręcasz śmiglo.Jak dociśniesz, to te ząbki delikatnie się wbijają i śmiglo jest nie do przekręcenia, bez odkręcenia nakrętki. Jest to znacznie, znacznie bezpieczniejsze rozwiązanie
Okej, poszperałem trochę na necie i z tego co sprawdziłem, to nie ma już FC działających z PWM. Minimum to PPM.
Więc wymyśliłem coś takiego:
https://avifly.pl/pl/pdb-i-inne/matek-fchub-a5 plus https://avifly.pl/pl/kontrolery-rc/fc-matek-f405-std-
I do tego jakaś aparatura obsługująca PPM
Jak już mówiłem. Prościej wziąć ten co ja linkowałem, zamiast kombinować z PDB.
-
- tarka nie ma z tym nic wspolnego
- co to takiego ta zwrotka do FC z obrotami silnika ?
Tarka ma bardzo dużo wspólnego. Nie musisz mieć już lewej nakrętki, bo zabezpiecza przed przekręceniem się śmigieł, a przez to śmigło nie próbuje przekręcać nakrętki
A o zwrotce pisałem tutaj:
I mimo wszystko utrzymuje, że rama jest tragiczna. W niej nawet nie da się ustawić jakiegokolwiek uptiltu kamery, kamera mocowana jest tam do pionowej wręgi.
Jeśli zaś chodzi o silniki to przypominam o łożyskach, to jest naprawdę mało żywotne
-
Z rzeczy które podałeś to wszystko jest złomem.
Taka rama jak podałeś to mi spłonęła (i dobrze jej tak), taki flight controller to już całkowity przeżytek, podane silniki zostały zastąpione przez znacznie lepszy model w rozsądnej cenie, ale śmigła za to ok.
Weź też pod uwagę, że współczesne silniki nie są już CW i CCW, zamiast tego mają blokadę śmigła (taka jakby tarka). Znacznie wygodniejsze rozwiązanie i prościej podmeinić silnik w razie czego.
Jeśli chcesz kupować w Polsce to polecam:
Flight controller - https://avifly.pl/pl/kontrolery-rc/kakute-f4-aio-v2 - calkiem przyjemny i ma wbudowany PDB. Plus procesor F4 gwarantuje, że wszystkie nowe szpeje będą śmigać.Rama - https://abc-rc.pl/product-pol-9883-Rama-GEP-AX5-215-215mm-ramiona-4mm-Racing-Drone.html - MOja pierwsza sensowna rama (właśnie po tej co pokazałeś). Zrobiłem jej rzeczy okropne, a nie zaliczyłem żadnego uszkodzenia. W dodatku jest w pełni osłonięta, przez co ładnie chroni sprzęt w środku.
Silniki - https://avifly.pl/pl/silniki-do-dronow/t-motor-lf40 - bardzo solidne silniki, z oversize'owymi łożyskami (5x4x4). Emaxy które proponujesz mają łożyska o średnicy wewnętrznej 3mm i pożyją znacznie krócej.
Regle - https://abc-rc.pl/product-pol-9216-ESC-BlHeli32-30A-3-4S-32bit-BLHeli-32-amp-Dshot1200-STM32F051.html - Na BLHeli_32, więc pozwalają mna zwrotkę do FC z obrotami silnika, co daje naprawdę dobre efekty w kontekście jakości sterowania.
Zaś najtańsze sensowne to te: https://abc-rc.pl/product-pol-9948-ESC-BLHeli-S-25A-2S-4S-4-5g-Dshot600-regulator-do-dronow-wyscigowych.html - ale musisz wtedy liczyć się z tym, że mogą nigdy nie dostać telemetrii zwrotnej.
Jeśli byś brał poza Polską to polecam taki sprzęt (jednak lepszy):
Rama - https://pl.aliexpress.com/item/Rooster-230-225mm-5-FPV-Racing-Drone-Quadcopter-Frame-5-Inch-FPV-Freestyle-Frame-PK-Armattan/32890976635.html?spm=a2g17.search0104.3.2.104e4516Tkymib&ws_ab_test=searchweb0_0,searchweb201602_6_10065_10068_319_317_10696_10084_453_10083_454_10618_10304_10307_10820_10821_10301_537_536_10902_10843_10059_10884_10887_321_322_10103,searchweb201603_6,ppcSwitch_0&algo_expid=b13b1cac-8163-4f91-9ea5-f465361c9650-0&algo_pvid=b13b1cac-8163-4f91-9ea5-f465361c9650&transAbTest=ae803_5 - Metalowa klatka świetnie chroni kameręSilniki https://www.banggood.com/Emax-ECO-Series-2306-6S-1700KV-4S-2400KV-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1415430.html?rmmds=search - Tutaj Emax zaszalał ostro. Nowoczesne, dobrze wykonane silniki w cenie płatków śniadaniowych
FC - https://www.banggood.com/Matek-Systems-BetaFlight-F405-AIO-Flight-Controller-Built-in-PDB-5V-2A-9V-2A-Dual-BEC-for-RC-FPV-Racing-Drone-p-1165338.html?rmmds=search - solidny, łatwy do lutowania i ze świetnym lay-outem.
Regle - https://www.banggood.com/UFOFPV-35A-BLHeli_32-ESC-Dshot1200-3-5S-Integrated-RGB-LED-For-RC-Drone-FPV-Racing-Muti-Rotor-p-1327567.html?rmmds=search - BLHeli_32 za grosze, co chcieć więcej?
Poza tym zastanów się dobrze nad kamerą. Uważam, że Runcam Swift to najtańsze co warto kupować. Wszystko poniżej zapewnia zaskakująco gorszy obraz.
I tego co linkuje nie odbieraj jako podejścia, że trzeba od razu kupić najlepsze. To wynika z tego, że odkąd kupiłem porządny sprzęt do quada, to jakoś wydatki na quady mocno spadły.
Tzn. biję moim quadem w glebę bardzo często i naprawdę brutalnie, a nic jeszcze poza śmigłami nie wymieniłem. Kiedy próbowałem się bawić na tanich FC (Omnibusy F3, NAZE, czy SPRacing F3) to więcej emocji zapewniało mi podłączenie zasilania i czekania na dym, niż samo latanie.
Podobnie z silnikami. Tanie się krzywią (aczkolwiek te Emaxy nie są takie złe, po prostu są już lepsze).
-
E nie jello jest bardzo prozaiczne. Brakowało mi śmigieł na zmianę i latałem na ogryzkach. Jak śmigła są ok to obraz jest jak trzeba.
A co do ścigania to problemem jest właśnie zwinność, ten quad ma duzo masy i łatwo przestrzelić zakręt (co jest w pełni intencjonalne) . Lepiej się nadaje mój ultralekki quad, ale temu trochę mocy brak.
-
Jak znajdę chęć do jakiejkolwiek rywalizacji
Słabo z tym u mnie ostatnio.
Ale o jakimś quadzie do ścigania myślę, bo te co mam to się nie nadadzą
-
Quad 6s ma obecnie nalatane grube godziny (samego materiału video mam nagrane ze dwie godziny, a z reguły nie latam z kamerą).
I wciąż lata cąłkowicie bezproblemowo (minus prostowanie mordki młotkiem po solidnej glebie, ale to się zdarza).
Ale to co chcę pokazać, to efekt mojego wzięcia quada na parę dni wolnego do Nysy.
Miłego oglądania
-
1
-
-
Jak masz jeden dźwięk mniej niż normalnie to znaczy, że regle nie dostają sygnału od FC.
Jakiej wielkości to quad?
Dshot jest niestety dosyć czuł na długość kabla. Niemniej nawet przy długim kablu, regle powinny wystartować, później mogą być problemy.
Na początek - ustaw Dshota 600, wejdź w CLI, wpisz komendę DIFF i wklej tutaj co Ci iNav wypluję. Przejrzę czy w ustawieniach wszystko ok.
-
Używam jakiegoś styropianowego śmiecia, który już jest tak spracowany, że monitor mu blaknie.
Obecnie najtańsze pudełkowe gogle mają obraz o lepszych kolorach.
Przymierzam się do zmiany, ale samolotami latam na monitorze (23", a co
) a w quadach nie mam kiedy się namyślać na brzydotą kolorów -
Spodziewałem się takiej odpowiedzi, że jest to temat do olania. Za twoją radą po analizuję trochę modeli F1d.
Czy możesz mi udostępnić plik obrysu płytki i płytki wygiętej? Chciałbym sobie dla sportu przerysować ten „profil” a trochę nie wiem jak się do tego zabrać. Normalny profil ma górę i dół a tu co? Potrzebuję się na czymś wzorować
I tak przy okazji możesz mi powiedzieć, dlaczego ten model nie ma statecznika pionowego?
Niestety plików już nie posiadam, bo to było dosyć dawno.
Po prostu potraktuj gore i dół profilu jako osobne krzywe, które są bardzo blisko siebie i tyle.
A ten model statecznik pionowy ma, tyle, że powstały przez wygięcie poziomego. To tak jakbyś miał Vkę.
-
Czołgiem Panowie
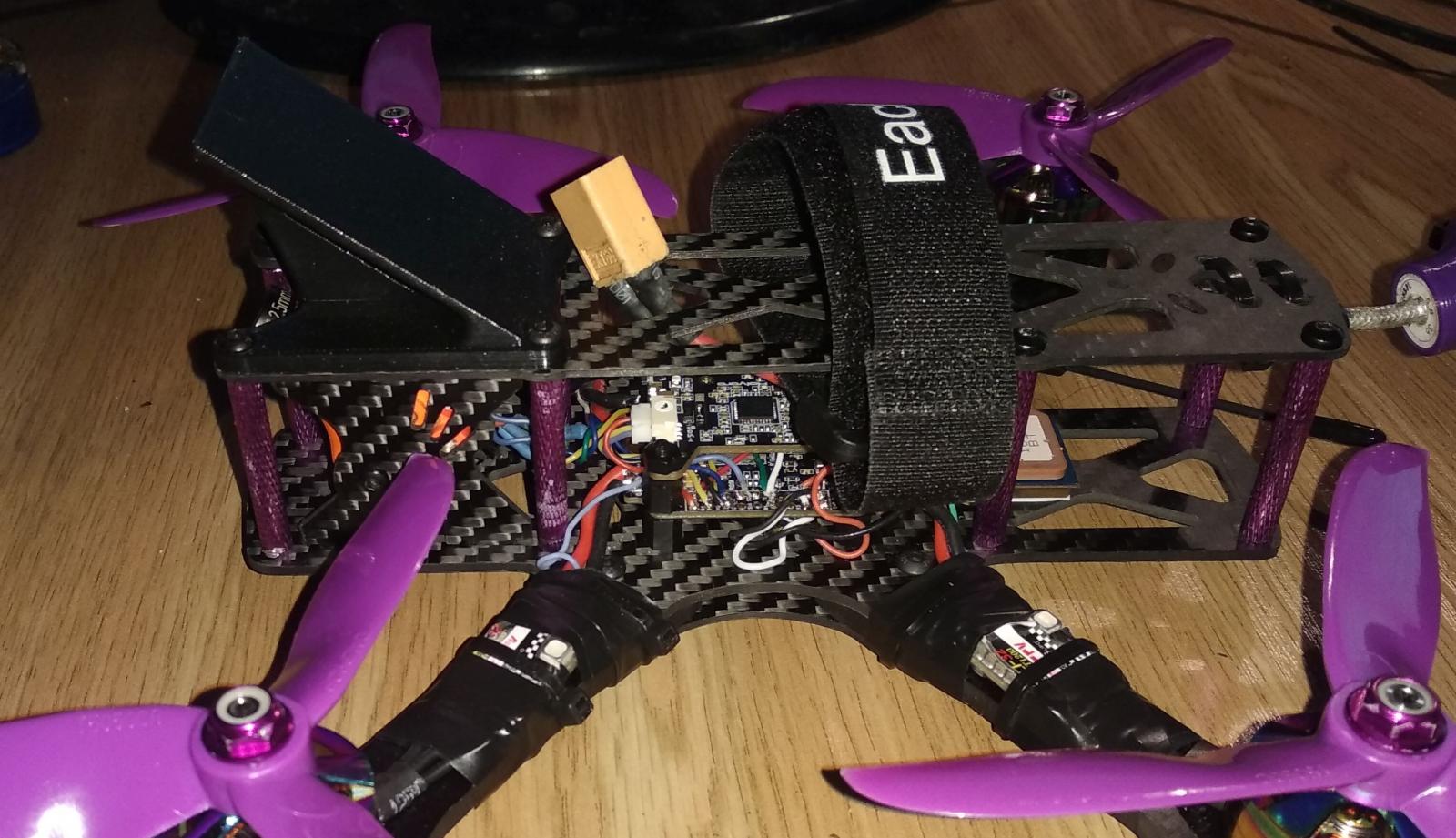
Jak może zauważyliście, to ostatnio lubię wspominać o nowym ficzerze w Betaflighcie, czyli dwukierunkowym Dshocie. Więcej o nim napisałem tutaj ( http://pfmrc.eu/index.php/topic/77655-jak-posk%C5%82ada%C4%87-lepszego-quada-250/page-2?do=findComment&comment=738836 ), więc nie będę się powtarzał. To co jest istotne, to to, że do ostatnich paru dni był on dostępny tylko dla bardzo krótkiej listy wspieranych kontrolerów lotu. Chcąc koniecznie przetestować jak ten ficzer się sprawuje wykorzystałem przypływ niechcianych pieniędzy (serio, jest coś takiego, też bym nie przypuszczał) i zakupiłem odpowiedni sprzęt, aby złożyć dobrego, nowoczesnego quada który podoła wyzwaniom stawianym przez to rozwiązanie techniczne. Bo jak powszechnie wiadomo - życie jest za krótkie by nie eksperymentować (wstawcie sobie jakiś dobry żarcik o przedrostku bi w bidirectional i eksperymentach)
Na całość składa się:
-Kontroler lotu - Holybro Kakute F4 AIO - wolałbym Mateka, średnio mi się lay-up podoba, ale tylko to było dostępne w Polsce ze wspieranych FC
-Silniki - BrotherHobby Returner R6 2400kV - w końcu! W końcu mogę mieć to obrzydlistwo na swoim modelu!
- ESC UFOFpv 35A BLHeli_32 - skanibalizowane ze starego quada 5"
-Odbiornik R9 Mini - te odbiorniki są tek tanie, że nie widzę powodu do stosowania 2,4GHz w quadach obecnie
-Nadajnik Video - Holybro Atlatl HV v2 - filtrowanie ma całkiem fajne, ale jakoś nie chce gadać z FC po SmartAudio, co mnie nieco denerwuje
-Kamera - Runcam Swift 2 - skanibalizowany z poprzedniego quada
-Rama - Martian II z Banggooda - całkiem fajna, ale jakoś trąci myszką. Grunt, że jest sztywna
- i moduł GPS - bo się przydaje.Ze względu na posiadane regle - złożyłem quada tak aby latał na pakietach 4s. Teraz trochę żałuje, ale o tym później.
Całość prezentuje się tak:Całośc bez aku waży 378g. Bardzo standardowa waga, mój quad na 6s waży bez pakietu 385g.
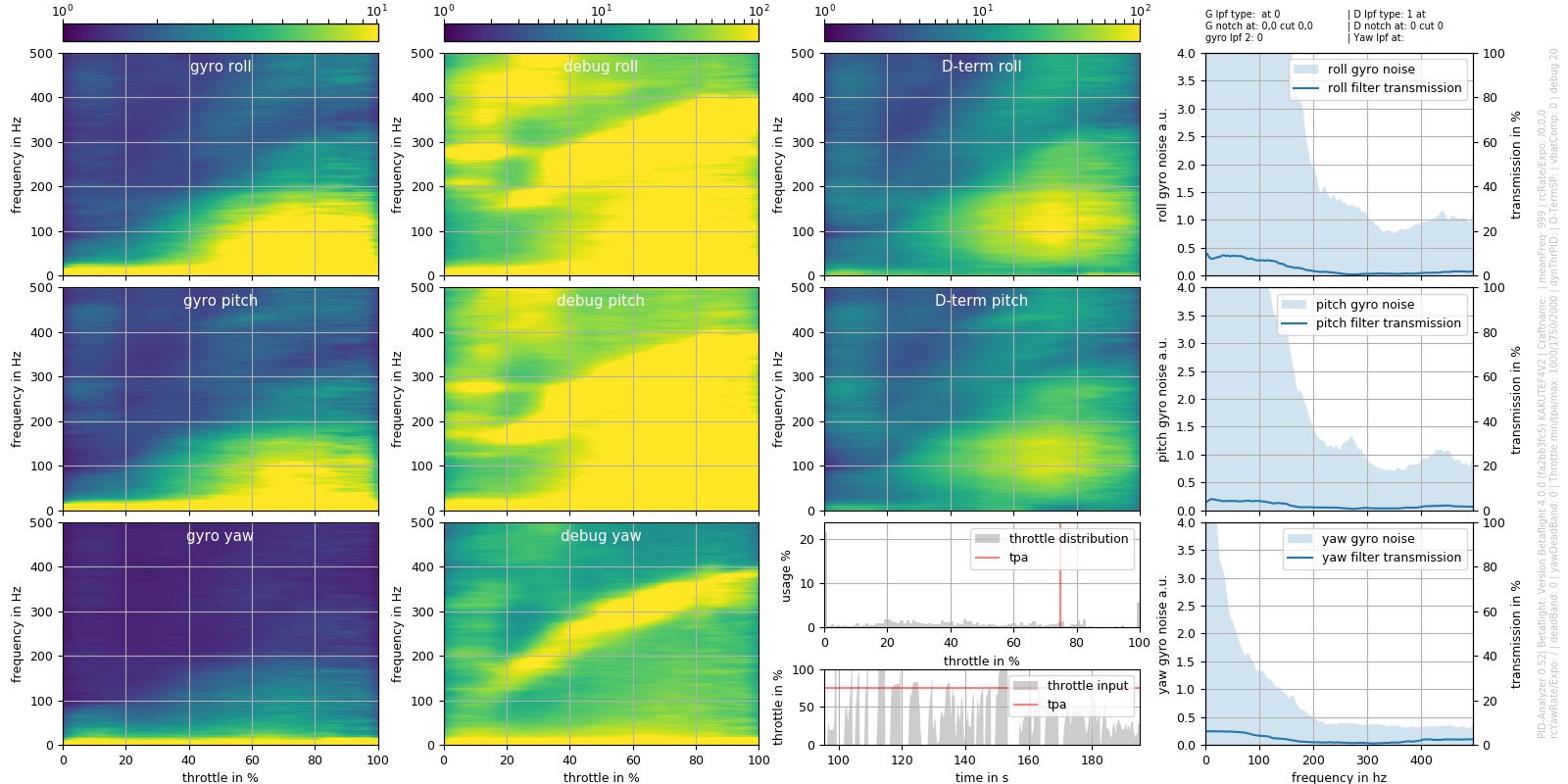
Lata się tym zacnie, choć ku mojemu zaskoczeniu - ten quad wibruje jak popieprzony:
Nie mam pojęcia co się tu dzieje. Tzn. Bardzo dużo syfu przechodzi przez filtry i to dla niskich częstotliwości, a przed filtrami to w ogóle nie ma o czym gadać.
Wydaje mi się, że problem jest jakiś na linii ESC - regler. Tzn. dla niskich obrotów silniki brzmią jakby coś chrobotało. To z reguły wskazuje na jakieś problemy z komutacją.
Mimo to - quad lata naprawdę przyjemnie, ale z jedną, dużą uwagą.
Pakiet 4s 1300mAh zjada w 2, 2,5 min :|
Nie ma tu porównania do 6ski, 6ska jest znacznie bardziej oszczędna. Trochę teraz żałuję, ze nie dorzuciłem do regli które pracują na 6s.
Jak lata można zobaczyć:
Niestety - RunCAM kolegi się uszkodził i film wygląda fatalnie. Ale za to ładnie widać, że mimo sadystycznego maltretowania przepustnicy nie telepie w żadnym punkcie (i tylko po to ten filmik jest, wrażeń innych nie dostarcza).
Jutro postaram się nagrać coś swoim Runcamem, będzie to wtedy jakoś wyglądać
A jaki jest finał eksperymentu? Kiedy chciałem skonfigurować flight controller i wszedłem na GitHuba po binarkę, to odkryłem, ze właśnie wypuszczono binarki do płytek F7. Innymi słowy - wszystkie eksperymenty moglem zrobić na quadzie na 6s, a ten był całkiem niepotrzebny
Ale quad, to quad, zawsze coś do latania.
-
1
-
-
Wczoraj, ku mojemu lekkiemu zdziwieniu (bo poskładałem specjalnie kolejnego quada na F4, żeby móc po testować temat :| Pokażę w innym temacie) okazało się, że rzucono binarki Betaflighta 4.0 które pozwalają uruchomić dwukierunkowego Dshota na płytkach z procesorami F7.
Cel dwukierunkowego Dshota jest wybitnie szczytny - tzn. dzięki niemu ESC przesyła po linii sygnałowej (czyli tej samej którą FC zadaje obroty silnika) informacje zwrotną z aktualnymi obrotami silnika. Tak konkretna informacja pozwala zaś dopasować filtry środkowozaporowe (notch filters) w taki sposób, aby częstotliwość ich środka (czyli tam gdzie tłumią najwięcej) odpowiadała częstotliwości z jaką kręci się każdy silnik. W efekcie mamy 12 filtrów, gdzie 4 odpowiadają na obroty silnika, a pozostałe 8 obsługuje częstotliwości harmoniczne każdego z poprzednich zakresów.
To wszytko powoduje, że zamiast szerokiego filtra, który z grubsza odpowiada częstotliwości wszystkich silników na raz (a te w zakręcie np. potrafią mieć bardzo różne częstotliwości), ma się dwanaście wąziutkich filtrów które są bardzo skuteczne (mają wysokie tłumienie) i generują bardzo, bardzo małe opóźnienie (bo są bardzo wąskie).
Po powojowaniu z wgrywaniem beta wersji BLHeli i zabawami z ustawieniem nowego schedulera, wyłączeniem burst DMA, testowaniem czasu pętli etc. udało się telemetrię uruchomić i silniki pracowały prawidłowo, więc zająłem się nastawami filtrów.
W efekcie wyłączyłem wszystkie klasyczne filtra, poza tymi opartymi o obroty, klasycznym, niekaskadowym Dynamic Notchem (żeby zając się zewnętrznie generowanymi drganiami, np będącym wynikiem efektów aerodynamicznych) i pojedynczym filtrem dolnoprzepustowym dla samej części różniczkowej pętli PID (bo część D reaguje nie na zmianę, a tempo zmiany, więc jest to konieczne, aby nie upalić silników).
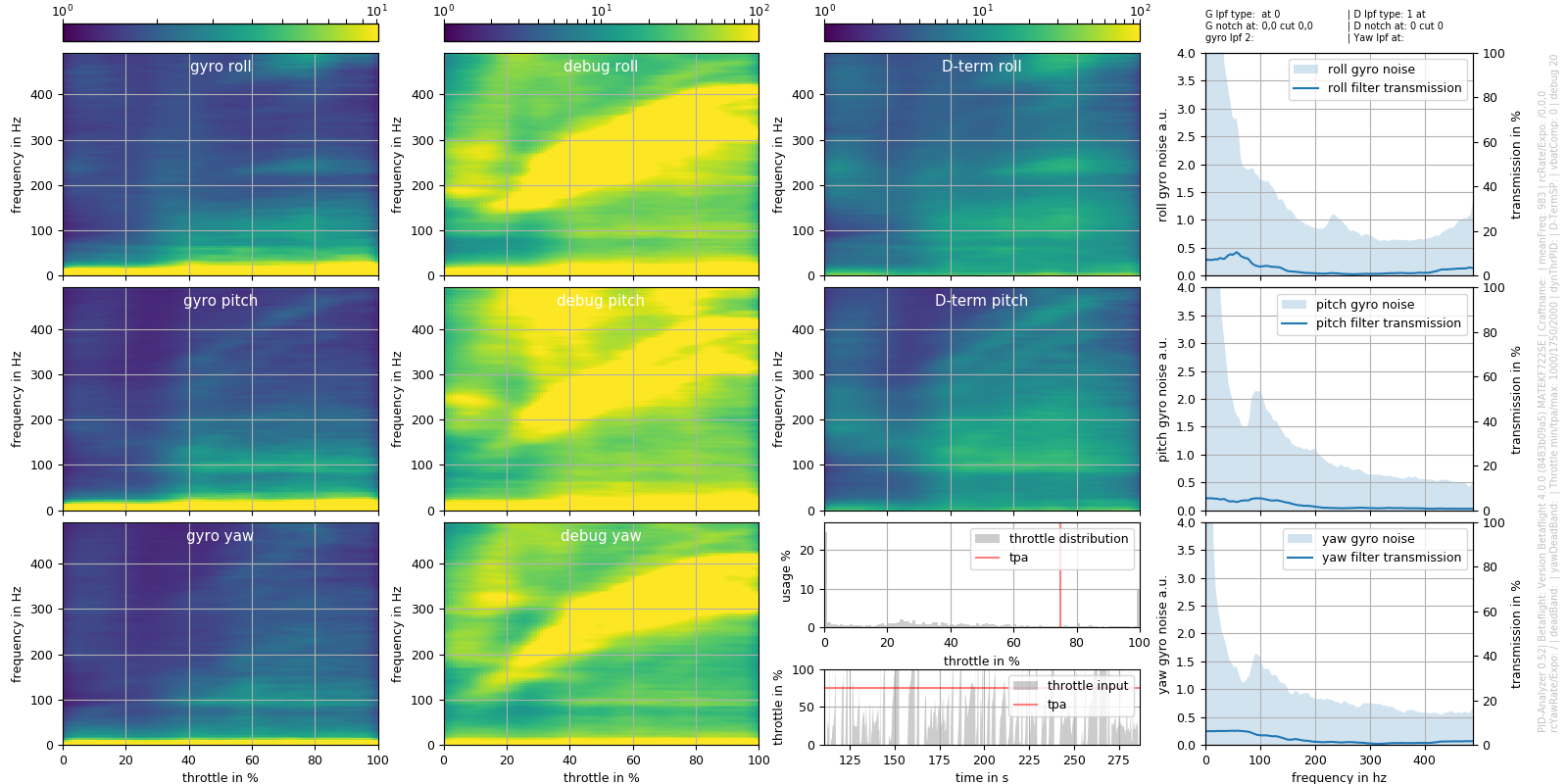
Całość oczywiście poszedłem przelecieć i wszystko oczywiście logować. Dla wygody znów przedstawiłem dane jako barwny wykres (Plasma Tree jest awesome):
I co tu widać?
Że quad drga, jak drgał od początku (bo jak ustaliśmy - rama sztywnością nie grzeszy). Widać to po tym jak dużo żółtego widać na danych sprzed filtrowania (czyli środkowa kolumna), ale po filtrowaniu...
Ech, to jest wręcz piękne <3
Nie ma praktycznie zarejestrowanych żadnych drgań. Jedyne co widać to minimalny ślad rezonansu ramy (250hz) i pozostały żółty kolor to już tylko ruchy quada w powietrzu..
I w ten sposób udało się rozwiązać odwieczny problem quadów. Tzn. za mało filtrowania powodowało dużo syfu, który powodował, że quad próbował z nim walczyć i całość mogła ulec wzbudzeniu (to wtedy kiedy quad próbując zareagować na drganie generuje więcej drgań i odlatuje w efekcie do dalekich krain), a za dużo szerokiego filtrowania znacząco zwiększa latencję. To nie jest może duży problem, dla konstrukcji o słusznych rozmiarach, bo one nie są bardzo dynamiczne, ale kiedy mały quad wchodzi dynamicznie we własny strumień zaśmigłowy (czyli przy zakrętach, akrobacji itp) to ruchy wywołane turbulentnym powietrzem są bardzo szybkie, więc całość zaczyna być mniej stabilna i się telepać.
Efekt jest fantastyczny dla pilotażu. Lata się wręcz jak w symulatorze. Quadowi jest całkowicie obojętne czy leci w strumieniu zaśmigłowym, niezależnie od tego zawsze reaguje idealnie, a obraz w kamerze ani drgnie.
Jeśli ktoś chce zrobić u siebie, to polecam wiki:
https://github.com/betaflight/betaflight/wiki/Bidirectional-DSHOT-and-RPM-FilterInformacji jest tam wystarczająco aby to sprawnie uruchomić (bo c'mon jak ja to uruchomiłem to to nie może być trudne), ale jak ktoś nie czuje tego co tam jest napisane, to lepiej poczekać chociaż na wersje Release Candidate BFa, bo całość jest wciąż mocno testowa
-
1
-
-
Czytam książkę "Modele halowe z napędem gumowym" i mam kilka pytań.
W książce jest rozdział profile. Autor piszę, w modela halowych używa się profili turbulentnych. Stosuje się również profile laminarne, ale wieloletnie doświadczeni wskazuję, że nie ma to znacznie w F1D. Nie zawracał bym sobie tym szczególnie głowy gdybym nie był po lekturze "Tajemnica liczby Reynoldsa, przepływ laminarny, przepływ turbulentny" Patryka. Gdzie wykazuje "im dłużej jesteśmy w stanie utrzymać warstwę laminarną bez powstania separacji, tym więcej skorzystamy na mniejszym współczynniku tarcia"
Patryk znów pisze
"im liczba Re jest większa, tym szybciej dojdzie do turbulizacji warstwy przyściennej"
Modele te latają na niskich Re może rodzaj profilu nie ma tu znaczenia? to by potwierdzały słowa autora
Hmm, jakby to wytłumaczyć...
Rzecz polega na tym, że energia opływu wokół skrzydła w F1D jest dokładnie żadna. To powoduje, że jakiego byś profilu nie zorbił to i tak nie będzie miało to sensownej doskonałości.
Całą idea profilu polega na tym, żeby jak największą masę powietrza odchylić do dołu, jednocześnie jak najmniej zmniejszając jego prędkość.
W tym wypadku profil łukowy jest tyle dobry co każdy inny, turbulizacji i tak tu nie uświadczysz, w efekcie zwyczajnie nie ma parametrów na które można wpływać. Byle było ugięte i miało uczciwy kąt natarcia
Ponieważ jeszcze dużo nie rozumiem chciałbym wprost spytać, jakie używa się profile w modelach F1D i dlaczego? Autor opisuje profil cyrklowy, łukowy. Chciałem zobaczyć charakterystyki tego profilu, ale nie wiem co wpisać w google.
Czy mogę prosić o wygenerowanie charakterystyki dla profilu cyrklowego w XFLR5?
Łukowy i tyle
Jak pisałem wcześniej - nic nie da się tu osiągnąć.
Z charakterystykami też będzie trudno dla tak małych Re. XFLR5 nie liczy tego dobrze, a w tunelu się tego nie bada.
Możesz popatrzeć co w tym poście wrzuciłem - tzn żeby się dowiedzieć po co profil się ugina w tego typu rzeczach:
(sam model który tam opisuje to taki nieco jak F1D jest w sumie)
Ostatnie pytanie jest w kontekście śmigła, ale tyczy się profili. Autor piszę, że na profil śmigła należy wybrać profil o minimalnym oporze przy maksymalnym wyporze (największa doskonałość). Jaki profil spełnia to założenie?
E to akurat nie jest takie proste, bo dochodzi jeszcze opór indukowany na końcówce łopatki śmigła i w efekcie bardziej efektywne może być śmigło z mniej nośnym profilem, a pracujący na wyższych nieco obrotach.
A nawet jeśli, to współczynnik który Cię tu interesuje nie jest doskonałość aerodynamiczna (czyli siła nośna/opór), a funkcja energetyczna (czyli (siła nośna)^3/(opór)^2). Im ta funkcją jest wyższa tym mniej energii potrzeba na wytworzenie zadanej siły nośnej (czyli np. samolot dla max doskonałości przeleci najdalszy dystans, a dla max funkcji energetycznej będzie najdłużej utrzymywał się w powietrzu).
Ale w dużym skrócie - profile do F1D to raczej jest kwestia do olania. I z perspektywy kogoś kto zajmuje się liczeniem aerodynamiki, jak i z perspektywy kogoś kto narobił się gumówek na kilogramy.
SPrawdź po prostu jaki bardzo ugięte profile mają najlepsze konstrukcje już jesteś urządzony
-
ICM ustawiony na 8k zachowuje się normalnie, jedyna różnica tych gyro polega na tym że można próbować szybciej taktować pid loop w przypadku ICM co generalnie w większości przypadków przekłada się na pogorszenie charakterystyki lotu. Natomiast ekipa BF ciągle pracuje nad poprawieniem filtrowania i udostępnienia stabilnie latającej wersji dla 16/32k gyro. Jednakże początkujący pilot może to spokojnie zignorować. Przez długi czas i tak nie będziesz w stanie odczuć różnic. Silniki które wymieniasz były ok te 3 lata temu. Teraz faktycznie lepiej zakupić co najmniej 2205.
Sent from my Mi MIX 2 using Tapatalk
Support dla trybu 32kHz został porzucony jakoś tydzień temu w BF4.0.
Powodem było to, że wyłączenie filtru sprzętowego w żyroskopie (konieczne aby osiągnąć tak wysokie taktowanie) powodowało, że konieczne było włączenie ostrzejszego filtrowania w FC i w efekcie opóźnienie rosło.
Inną kwestia jest, że różnica w latencji między 32kHz,a 8kHz jest żadna w porównaniu do opóźnienia wynikającego z przesunięcia fazowego filtrów (dlatego tak bardzo chcę potestować działanienfiltrów opartych o telemetrię, ale to już w moim wątku).
Niemniej przystosiwanie żyroskopu do pracy z takim taktowaniem powoduje, że jest on czulszy na śmieci.
Jak będę miał czas w weekend to porównam odczyty z MPU do IMC (mam dwużyroskopowego Mateka, więc wyniki będą porównywalne).
Niemniej nie ma co się tym bardzo przejmować, mnie po prostu kręcą dziwne rzeczy
-
Zapomnij o tak malych reglach, celuj w cos na poziomie 30A tymbardziej ze emaxy nie naleza do ekonomicznych silnikow. Ok znajomy mial walkere okolo 250 z reglami chyba 15A ale to nie latalo za bardzo, phantom 2 latal z podobnymi predkosciami
Wysłane z iPhone za pomocą Tapatalk
E nie, 12A to może i dadzą rady.
Problemxjest całkiem inny - SimonK to regle które odstają w dwóch kwestiach. Pierwszą jest protokół sterowania. Klasyczny PWM jest obrzydliwie powolny, przez co quad wykona całkiem spory ruch nim regoer zareaguje na komendy z FC.
Druglą jest aktywne hamowanie. Brak tego w SimonK powoduje, że po zdjęciu gaazu do zera quad dosłownie wisi ułamek sekundy w powietrzu nim opadnie. Oczywiście przeszkadza to też w sterowaniu reakcje są wolniejsze.
Wszystko to powoduje, że quad na SimonK musi mieć niższe PIDy, żeby nie oscylować i w efekcie lata się mocno ścierowato.
Silniki mam takie: EMAX MT 1806-2280KV
Kontroler zamówiłem taki: FC Holybro Kakute F4 V2
Regulatory: ESC 30A BLHeli_32bit DShot1200
Rzeczy zamówione w Polsce.
Dziękuję za wszystkie sugestie.
Silniki masz małe, ale ja naprawdę polecam taki rozmiar:
http://pfmrc.eu/index.php/topic/78766-ultralekki-quad-5/
Wbrew pozorom - robi to kawał dynamiki.
Martwi mnie trochę FC, bo choć sam taki kupiłem w wersji AIO (dziś odebrałem
) to dla Ciebie może nie być najlepszy.Po pierwsze lepiej byłoby wziąć wersję AIO, bo wtedy masz wbudowane PDB z pomiarem prądu, a po drugie ma to żyro z serii ICM, a nie MPU. To powoduje, że całość jest bardziej czuła na szum, tak elektryczny, jak i mechaniczny.
To jest dobra płytka dla miłośników dłubania.
-
CC3D to najgorszy szrot jaki możesz kupić.
Naze32 ma solidne drugie miejsce na liście przestarzałych badziewi.
Na początek polecam ten FC:
https://www.banggood.com/Matek-Systems-BetaFlight-F405-AIO-Flight-Controller-Built-in-PDB-5V-2A-9V-2A-Dual-BEC-for-RC-FPV-Racing-Drone-p-1165338.html?rmmds=searchMa wszystko co potrzebujesz. Tzn. ma wbudowane PDB, czujnik prądu, solidnie przemyślany Lay-out i jest naprawdę solidny.
Nie ma wprawdzie magnetometru, ale wierz mi, że magnetometru nie potrzebujesz.
No i warto pamiętać, że Mateki jako jedne z niewielu FC mają sensowną dokumentację.
Nie jest to całkiem plug&fly, ale obecnie Betaflight jest naprawdę prosty w konfiguracji i na fabrycznych nastawach lata nad wyraz zacnie.
Polecam CI tylko nie władować się w pułapkę regli na SimonK. Tzn, żeby quad tej klasy latał sensownie musisz mieć regla co najmniej na BlHeli_S, a najlepiej na BLHeli_32 (dwukierunkowa telemetria w tym roku będzie robiła furorę).
Polecam Ci te regle:
https://www.banggood.com/UFOFPV-35A-BLHeli_32-ESC-Dshot1200-3-5S-Integrated-RGB-LED-For-RC-Drone-FPV-Racing-Muti-Rotor-p-1327567.html?rmmds=searchOd pół roku bardzo staram się je popsuć, a one mają to gdzieś. Przeżyły już ze trzy flight controlery i dwa zestawy silników.
No i wsumie na silnikach też średnio się opłaca oszczędzać. Tzn. zacząłem od Racestarów i wymieniłem je już dwa razy. A kiedy wykosztowałem się na TMotory to mam spokój, chodzą idealnie.
Ostatnio pojawiły się takie silniki:
https://www.banggood.com/Emax-ECO-Series-2306-6S-1700KV-4S-2400KV-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1415430.html?rmmds=search&ID=519231&cur_warehouse=CNCena jak za pistacje, a mają bardzo dobrej jakości łożyska (bo to łożyska padają najczęściej w tanich szrotach).
-
Ja bym próbował wytłumić to taśmą izolacyjną albo jakimś innym materiałem tłumiącym. Nie dużym kosztem może przesuniesz częstotliwość wibracji. No i przy okazji potwierdzisz że to wina ramion i ich łączenia.
Tutaj jest tyle mocy, że konieczne jest naprawdę mocne skręcenie śrub mocujących ramiona (a i to na Locticie), więc tłumienie niewiele pomoże.
Druga rzecz - wytłumienie spowoduje, że połączenie będzie jeszcze mnie sztywne. W efekcie częstotliwość przesunie się w dół, co jest efektem zdecydowanie niepożądanym, bo spowoduje przesunięcie albo filtra dolnoprzepustowego w dół, albo dynamic notcha w dół. Obie te rzeczy zwiększają latencję (czy tam przesunięcie fazowe, co kto woli).
Nie wiadomo wprawdzie jak z kwestią transmisji drgań, ale z racji tego, że dla niższej częstotliwości, a tej samej amplitudy masz mniej energii w drganiach, to łatwiej o dalszy transfer drgań.
Miękkie mocowanie ma sens raczej w silniku, który z definicji wibruje z wysoką częstotliwościowa, wtedy każde wytłumienie spowoduje znaczne obniżenie transmisji dalej.
-
Wygląda fajnie. Jak oswoisz się ze sprzętem i będziesz dostępny to wpadnij na jakieś zawody:
Brzmi jak fun, ale jeden quad quasi racingowy to za mało raczej (przynajmniej dla mnie). Jakbym wystartował swoim na 6s to raczej za cienki na to jestem (chociaż... może na pakiecie 5s 600-800mAh?)
Niemniej najpierw muszę poćwiczyć latanie tego typu, dobrze że dziś zacząłem
A samym quadem wylatałem uczciwe trzy pakiety i mam kilak obserwacji
1. Ten quad ma bardzo równe zużycie prądu. Tzn. średnio latam koło 5:30 na pakiecie 3s 850mAh, a dynamika lotu zmienia bardzo niewiele (ale ok, latam na 60st uptiltu w tym, wiec nie ma aż tyle pracy przepustnica). Dla porównania 6ską mogę rozładować pakiet w 2:30, a mogę latać i 9min.
2. Kamera, jak jej ustawiłem ostrość, to jest używalna. Choć rewelacji nie ma. Jakby ktoś się wahał między tą kamerą, a Runcamem Eagle, to niech bierze Eagle'a (czy Swifta, Swift też jest bardzo ok). Jedyna ciekawostka - zanim się nagrzała, to miała fatalny czas reakcji. Ale latałem o świcie, więc co się dziwić, zimno było.
3. Dobrze mi się wydawało, że ten quad nie posiada bezwładności. Tzn. kiedy próbowałem robić Split-Skę nad przeszkodą tak jak innymi quadami, to kiedy byłem nad przeszkodą, patrząc się na nią to quada łapie opór aerodynamiczny i spada się prosto na przeszkodę
. Tutaj robi się to bardziej samolotowo - półbeczką i półpętlą. Jeszcze zabawniej wychodzi Mattyflip. Quad zatrzymuje się w połowie i gubi prędkość postępowową.4. Dobrze się to dogaduję z nawet 60st uptiltu. W innych quadach preferuję 45st.
5. Ten quad jest nieuszkadzalny. Tzn władowując się w gałęzie na pełnej prędkości to nawet śmigła są całe. Silniki są zwyczajnie za słabe żeby uszkadzać śmigła
6. We własny strumień zaśmigłowy jest trudniej wejść, ale jednak kiedy wejdzie się to trzepie dosyć mocno. Wyłazi raczej wtedy rozmiar silników. Tak poza tym to moc silników jest jak najbardziej wystarczająca. Czyli ogólnie dobór napędu zdefiniuję jako sukces. Tutaj propwash mnie tak nie drażni, bo trwa bardzo krótko,nie wpływa na pilotaż i nic nie nagrwam, więc nie trzęsie mi kamerą HD
Ogólnie - polecam takiego quada. Jakbym teraz miał robić swojego pierwsze quada, to raczej poszedłbym w tę stronę. Pakiety kosztuje tyle co paczka pistacji, wszystko jest lekkie i gleboodporne.
-
Tutaj same ramiona nie pomogą.
Tzn - lewe i prawe ramię to osobne części, które trzymają się na jedynie dwie śruby.
A dwie śruby to zło kiedy mamy porządny moment gnący.
Jedyne co mógłbym zrobić to zastżpiać oba ramiona i łącznik jednym elementem.
Znasz jakieś uczciwe źródło płyt węglowych? Bo dostęp do frezarki nie jest problemem.








Problem z quadcopterem
w Multikoptery
Opublikowano
Sprawdź, czy ruchy quada zgadzają się z tym co pokazuje Cleanflight (czyli czy dobrze ustawiłeś kierunek zamocowania FC).