






Patryk Sokol
-
Postów
3 200 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
78
Odpowiedzi opublikowane przez Patryk Sokol
-
-
Ok, odkryłem co się stało.
Okazało się, że na oczkach mocujących płytka miała masę. Tą z kolei zwarłem przez śrubę mocującą (tak powinno być tworzywo) z płytką dystrybuującą prąd, ktora z kolei na oczku miała minus.
Efekt jest taki, że teraz płytka, przez procesor, podaje +12V na port szeregowy, co upaliło regle.
Cóż - głupio.
-
Ok mały update
Przyszła nowa płytka dziś. Polutowałem, sprawdziłem czy działa i było ok.
Przykręciłem do quada, izolując od spodu węgiel, podpiąłem zasilanie i z flight controllera poszedł dym.
Zanim zdążyłem rozłączyć spaliły się też regle (również dymiąc). To jest o tyle "zabawne", że regle nie były połączone jeszcze z FC linią sygnałową, jedynie UART był przylutowany
.
Ciężko mi uwierzyć, że to przypadek, pewnie coś musiałem zewrzeć. Ale jak spalić jednocześnie FC i 4 regle to nie mam pojęcia.
Szczerze to brak mi nieco chęci na jakiś czas, projekt idzie w odstawkę.
-
Jeśli chodzi o silniki to na max obrotach mogą wyciągać po ~25A(w zależności od śmigieł, więc przy punchu musisz mieć te 100A wydajności żeby to grało(nie wiem jak latasz), przy spokojnym lataniu spokojnie po 12-15A na silnik będzie. 1450mah x 35C= 50750, czyli wydajność prądowa twoich pakietów to ~50A, troszkę za mało jak na szybkie latanie, jak będziesz mocno cisnął to mogą Ci pakiety spuchnąć (po zakończonym lataniu nie są gorące przypadkiem ?)
Z pomiarami zużycia prądu na reglach nie pomogę Ci bo nigdy tego nie robiłem, mam w dwóch swoich copterach zwykły current sensor i po kalibracji śmiga to sobie ale dokładnych wskazań to na pewno to nie daje.
f3 nie ma już wsparcia w wielu programach wiec może tu jest problem z odczytem poboru prądu przez regle? Z resztą f3 już jest zbyt wolne jak na nasze czasy, rozumiem że była tania ale omnibus f4 od chinczyka z aliexpres to koszt 60-80zł
Łącze te pakiety równolegle, wtedy ich wydajność prądową mnożysz przez dwa. Czyli jest jakieś 100A, czyli na razie się zda.
Między innymi po to potrzebuję pomiary, żeby zobaczyć gdzie faktycznie dociągnie pobór prądu.
-
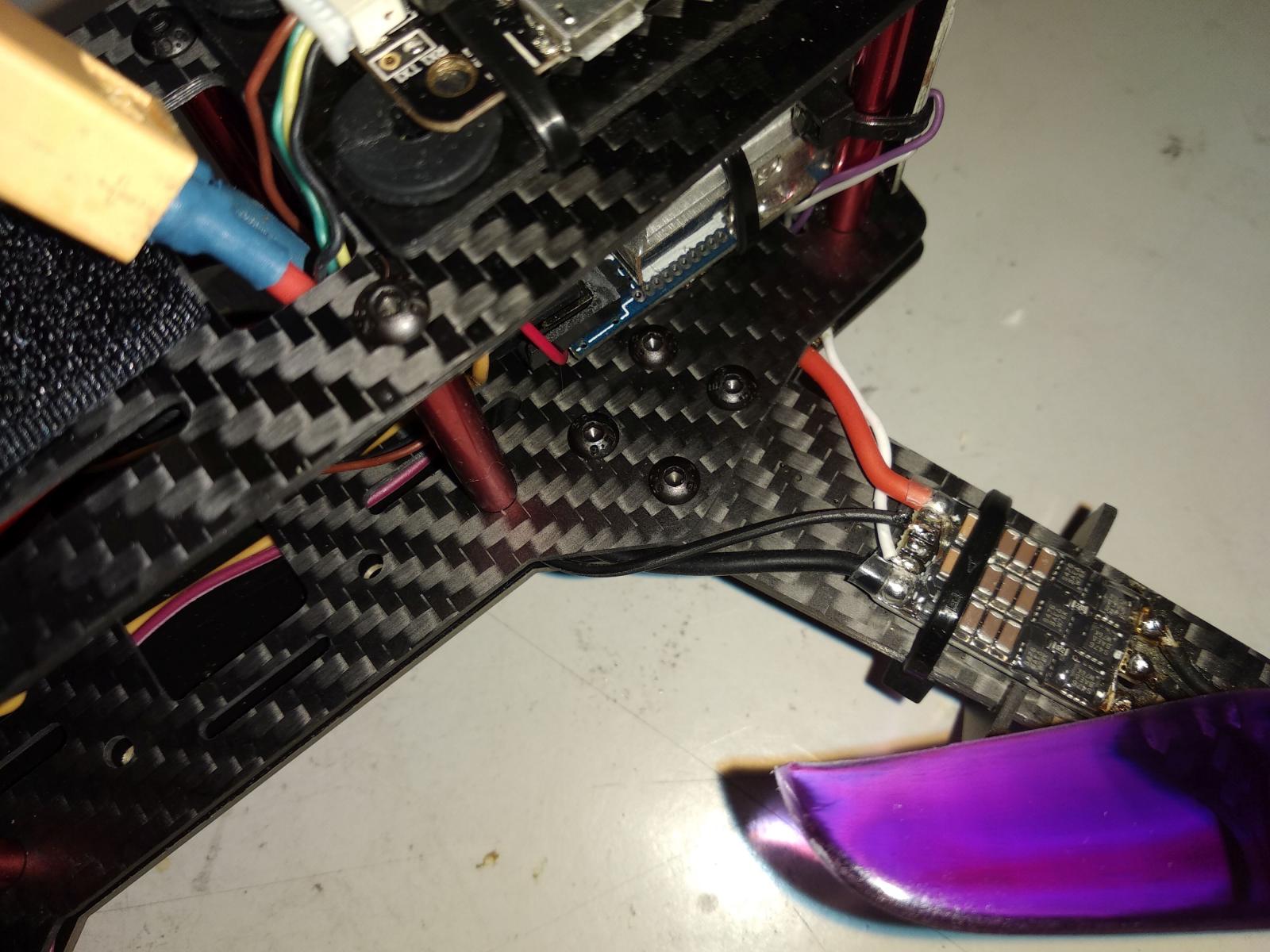
Jest kilka spraw które bym poprawił,
po pierwsze regle w termokurczki i ściśniecie kabli trytkami żeby nie latały po całym ramieniu( same kable nie regiel)
druga sprawa nie podoba mi się mocowanie anteny które zostanie wyrwane przy pierwszym krecie tzn antena i jej gniazdo
trzecie sprawa to mocowanie fc na trytki to jakaś paranoja
 albo na sztywno śrubami albo poprzez jakiś softmount (otwory zrobisz zwykłym wiertłem do metalu)
albo na sztywno śrubami albo poprzez jakiś softmount (otwory zrobisz zwykłym wiertłem do metalu)sprawa czwarta to schowanie fc do ramy gdzie będzie bezpieczniejsze
sprawa 5 to baterie trzeba dobierać najpierw po ilości cel, potem po wydajności prądowej C i na końcu pojemność i wadze
sprawa 6 jeśli chodzi o current sensor to sa fc z wbudowanymi juz sensorami, ale będę w stanie coś więcej powiedzieć kiedy sie dowiem do czego Ci pomiar prądu i czy potrzebujesz wartość całkowitą poboru z baterii czy musisz mieć odczyt z każdego silnika osobno i jak dokładne to ma byc
sprawa 7 f3 to juz prehistoria, szukaj następnym razem minimum f4 które ma jeszcze wsparcie
Ad.1 Regle są w koszulkach, a kable lutowane są do pól lutowniczych zaraz przy mocowaniu ramienia. Nic tam nie lata
Ad. 2 A jak polecasz? Też się nad tym zastanawiałem i na razie tylko zamocowałem na oblot
Ad. 3 A co nie tak z trytką? To nie jest tak po chamsku do węgla, tylko FC jest przyczepiony do platformy która jest na amortyzatorach gumowych,a dodatkowo sama płytka nie dotyka węgla bo ma gumowe podkładki. A, że wolałbym, żeby to było w środku ramy to inna kwestia.
Ad. 4 Być może później powiercę w środku ramy otwory, żeby przenieść amortyzatory i platformę do środka. Póki co może zostać, łatwiejszy dostęp do ustawiania (w heliku robilem podobnie, też FBL był początkowo przy belce, dopiero po ustawieniu wszystkiego wrzuciłem do środka).
Ad. 5 No, biorąc pod uwagę, że 2600kV, to raczej 3s na początek wystarczy. Pytanie pozostaje jaki zakres wagowy się stosuje, to już się dobierze. Póki co kupiłem dwa pakiety 3s 1450mAh 35C. Planuję łączyć je równolegle do quada, a szeregowo do helika (takie tam oszczędzanie)
Ad. 6 Potrzebuję pomiar mocy konkretnie na reglu. Fakt, że nie w tym quadzie koniecznie (choć tu też nie zaszkodzi), ale jest to dobra okazja żeby temat przetrenować przed poważniejszymi rzeczami. Innymi słowy - jakbym potrzebował ADC to bym sobie zrobił ADC (w dwóch modelach FPV mam), po prostu jak uruchomię telemetrię w reglach, to będzie to dla mnie bardzo pomocne do innych rzeczy
Ad. 7 Trochę tak. Ale była tania
.A sama płytka pojechała do serwisu w ABC-RC. Liczę, że szybko to załatwią.
-
Marku, ale ja Cię nie atakuje, nie potępiam, ani nie mówię nic złego.
Po prostu ciekaw jestem jaka jest różnica dla Ciebie między alkoholem etylowym, a innymi substancjami, skoro podpadają w sumie do tej samej kategorii (czyli rzeczy niezbyt zdrowych, a pomagających w konkretnych celach)
No i tak szczerze, czy za moje nie picie należy mnie podziwiać to nie jestem pewny. Ot. nie piję, bo nie, bo nie lubię ideologii tu nie ma żadnej. Ani to dla mnie wyrzeczenia, ani jakaś ważniejsza postawa życiowa.
ps. I taka ciekawostka - zasadniczo to od alkoholu i bodaj strychniny zaczęła się historia dopingu sportowego, więc pytanie o różnicę tym bardziej zasadnę
-
Co zaś do zawodów modelarskich, to gdybym brał w takich udział, to musowo przed startem strzelił bym sobie "setę", aby mi się grabki nie trzęsły... ;-)
A czym to się różni od każdego innego typu dopingu?
Też przyjmujesz szkodliwą substancję, której celem ma być poprawienie Twoich wyników.
-
No i zrobił się problem - poszedłem polatać quadem po oświetlonym boisku i spotkała mnie niemiła niespodzianka.
Po zmianie pakietu przestał działać jeden z silników. Po powrocie do domu przejrzałem całą elektrykę i wszędzie kontakt jest.
Tzn - regler prawidłowo dostaje napięcie itd.
Po dalszych badaniach wygląda to tak, że którykolwiek regler podłączony do tego złącza zwyczajnie nie działa, program do ustawiania BLHeli też go nie widzi.
Miernik wskazuje, że jest między połączenie między tym wyprowadzeniem z kontrolera, a odpowiadającą mu nóżka mikroprocesora.
Innymi słowy - elektrycznie wszystko jest jak należy, nie ma tutaj żadnego problemu, po prostu nawaliło jedno z wyprowadzeń.
Zmiany protokołów sterowania, kolejności regli, czy czyszczenie całego kontrolera i wgrywanie firmware'u na nowo też efektu nie przynosi.
Jest jeszcze coś co mogę zrobić, czy uderzać do sklepu po nową sztukę?
-
Czołgiem Panowie
Jak napisałem w wątku o 450tce - polatałem nią, pobawiłem się i stwierdziłem, że dla mnie trochę dynamiki brakuje. Tzn sama idea bujania po krzakach mi się spodobała, ale brak mi było szybkości i bezwładności.
Stąd postanowiłem zbudować coś innego:
Czyli jest to racingowa 250tka.
Zmontowałem całość na nieco lepszych komponentach niż 450tkę, czyli:
FC - Mini Occday F3 (albo Mini Flytower F3 ciężko powiedzieć)Regle - Coś 30A na BlHeli_32 (tzn. etykietki nei mają, ale wyglądają jak HakRC)
Silniki - Racing Bl2205 2600kV
Rama - QAV 250
O samej ramie wiele powiedzieć nie można - ot kawałek węgla.
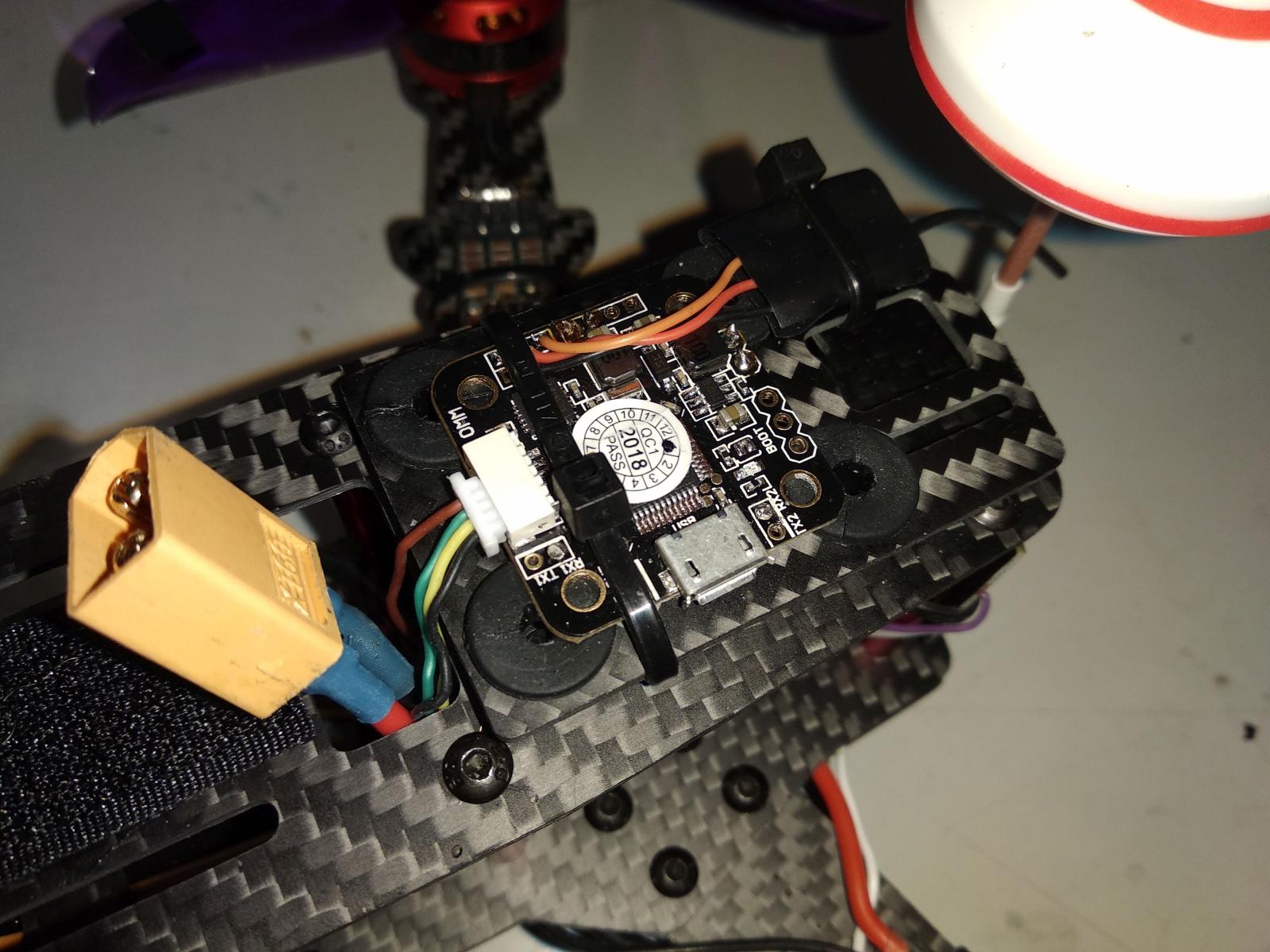
Za to podoba mi się dostarczona płytka do dystrybucji prądu. Z automatu dostarcza to stabilizowane linie 5V i 12V, co zawsze się przyda.
No i ma też wyjście na diody:
Diody zawsze są fajne, szczególnie gdy nie muszę ich sam okablowywać
Jak dobierałem flight controller, to kupiłem po prostu najtańszą płytkę, która nie jest F1. Zależało mi na co najmniej F3 żeby mieć dostęp do dynamicznego filtrowania i Dshota (co z kolei gwarantuje działanie telemetrii regli)
Jeśli chodzi o regle - dopłaciłem do BlHeli_32 głównie dla telemetrii. Mam parę przyszłych projektów, gdzie istotna będzie znajomość obrotów silnika i doszedłem do wniosku, że to może być najprostsza metoda podawania tego na OSD.
Jednak... Powiedzmy sobie szczerze, najważniejsze, że te regle mogą robić to:
A silniki z kolei - jak to silniki, grunt, że kręcą. Zastanawiałem się tylko jeszcze nad wersją 2300kV, ale stwierdziłem, że zawsze można dać mniej gazu.
Na tę chwilę - polatałem tylko quadem po pokoju. Co by nie mówić - jest bardzo stabilny. Ale co to warte to dowiem się dopiero jak pobujam się po powietrzu.
No i udało mi się kupić symetryczne śmigła. Jestem ciekaw jak quad będzie prowadzić się z nimi
Niemniej mam parę pytań do Was:
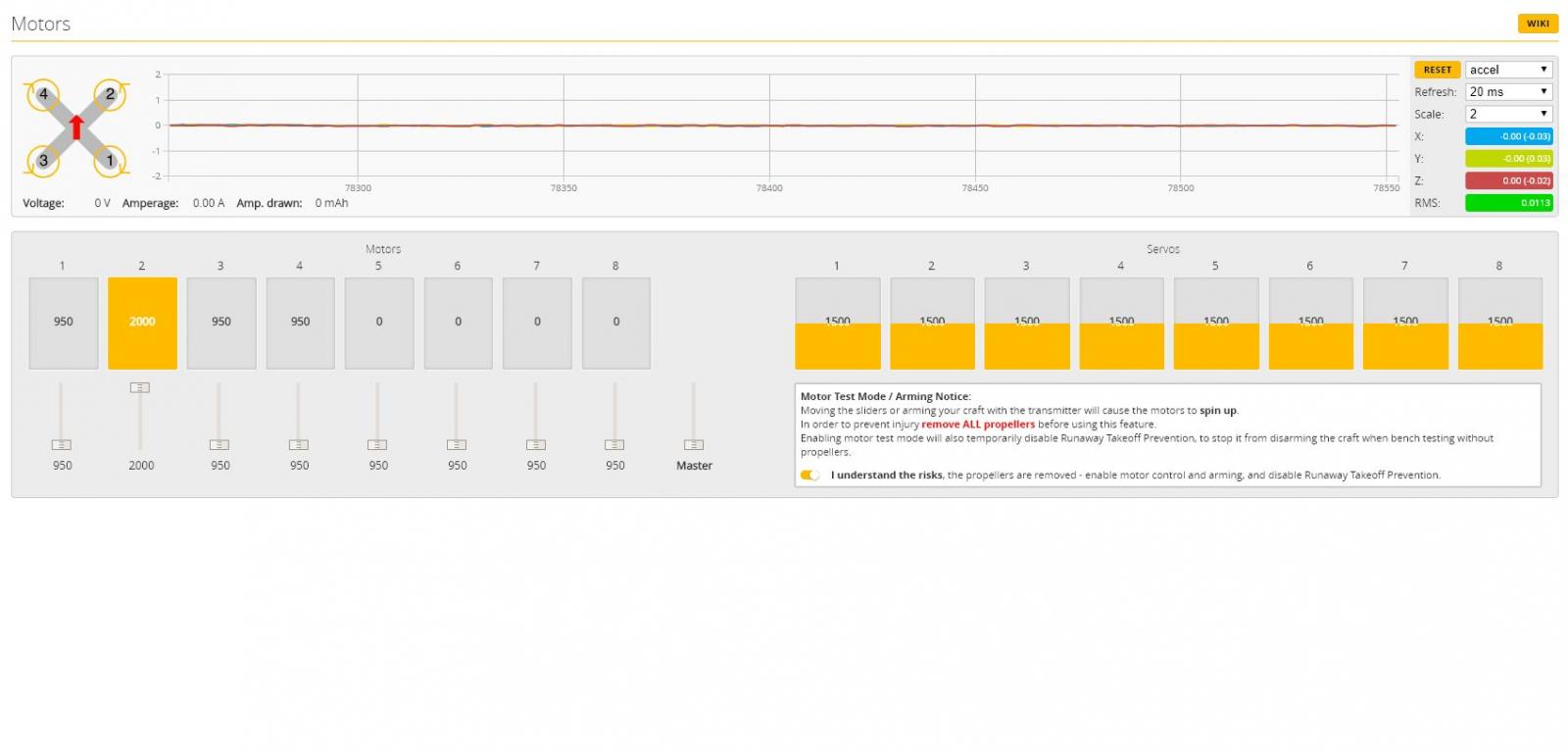
1. Regulatory prawidłowo podają wszelkie parametry - tj. temperaturę, obroty i napięcie, ale nie logują prądu. Przejrzałem już wszystko, przetestowałem każde ustawienie czujnika prądu i nie mogę z nich wydusić tej informacji. Macie jakiś pomysł czego szukać?
2. Jaki akumulator polecacie do tego typu sprzętu? Tak po mocy silników, to bym ładował tutaj jakiegoś 3s 3000mAh, ale widzę, że powszechniejsze są pakiety z gatunku 3s 1300mAh. Co polecacie? I może od razu jaką markę, z Gens Ace (a tego najwięcej w Warszawie) mam coś słabe doświadczenia
3. Bardziej celować w dynamic notch filter, czy w 8kHz pętle sterującą? Na F3 mam albo dynamiczny filtr i 4kHz, albo 8kHz i filtry statyczne.
-
Okazało się, że moja wyważarka do śmigieł była niewyważona
Tzn. miała lekko krzywą ośkę i przez to wyważanie śmigieł na niej nie dawało dobrego efektu.
Obecnie - na max obrotach pojawia się lekki rezonans, ale to już kwestia ramy. No i kto używa max obrotów non stop w quadzie.
-
Ale to nie o to mi chodzi.
Zmierzam generalnie do tego, że pojęcie o dopingu, czy innych dragach jest zadziwiająco nikłe.
Tzn. większość z tych substancji jest znacząco mniej szkodliwa, czy uzależniająca od alkoholu, a nikt nie twierdzi, ze od piwa się umiera i niszczy zdrowie.
Zmierzam generalnie do tego, że doping chemiczny (czy narkotyki używane rekreacyjnie) są znacznie mniej szkodliwe niż większość ludzi sobie wyobraża (nie, że nieszkodliwe, po prostu mniej), a alkohol znacznie bardziej niż większość ludzi sobie wyobraża (nie, że się umiera, po prostu bardziej szkodzi), a używa się do obu typów substancji znacząco różnej retoryki (tj. kulturalne picie jest ok vs od narkotyków się umiera).
Nie żebym do czegokolwiek namawiał, ja sam nawet alkoholu nie tykam w innej formie niż do mycia pędzli, po prostu to nie jest takie nieskomplikowane, żeby określić jednym zdaniem w którymkolwiek kierunku całość sytuacji.
A samo zagadnienie kontroli antydopingowej pewnie ma związek z kwalifikowaniem jako sport, gdzie wtedy pewnie musi podlegać pod WADA. Z całą pewnością nikomu nie zaszkodzi sprawdzenie, czy mu przypadkiem amfetamina w żyłach nie pływa, bo jeszcze będzie miał zjazd przy powrocie z lotniska i spowoduje wypadek.
No i ciekawostka - na zawodach łuczniczych małą ilość alkoholu uznaje się właśnie za doping, bo ręka się nie trzęsie.
A jak kogoś temat bardziej interesuje - mam ścianę prac naukowych w temacie
-
 1
1
-
-
Ba, niektórzy to nawet alkohol piją, żeby się ręce nie trzęsły...
-
1
-
-
Cóż - uporałem się ze wszystkim w tym Quadzie.
Dostał FPV, uruchomiłem OSD (nawet przeflashowując na MW OSD), wyregulowałem PID, pozbyłem się drgań itd.
I jaki wniosek?
Trochę to nudne
Tzn. lata bardzo dobrze świetnie nadaje się, do patrzenia na świat z góry i do bujania się między krzakami, ale brak mi w tym dynamiki.
Tzn. w FPV brakuje mi prędkości przelotowej, a w klasycznym lataniu lata się trochę jak helikiem, tylko tic-toców nie da się zrobić.
W każdym projekt mogę ogłosić sukcesem, lata bardzo dobrze, a ja mogę zająć się czymś innym, ale to w innym wątku
-
Musisz zewrzeć dwa pady na płytce:
https://cdn-global-hk.hobbyking.com/media/file/809619888X1213355X52.jpgPodpiąć od USB i wtedy wymusić flashowanie (najwygodniej z opcją flash on contact)
Ja swoje pady zwarłem robiąc kreskę ołówkiem, a po flashowaniu wyczyściłem gumką do mazania.
-
1
-
-
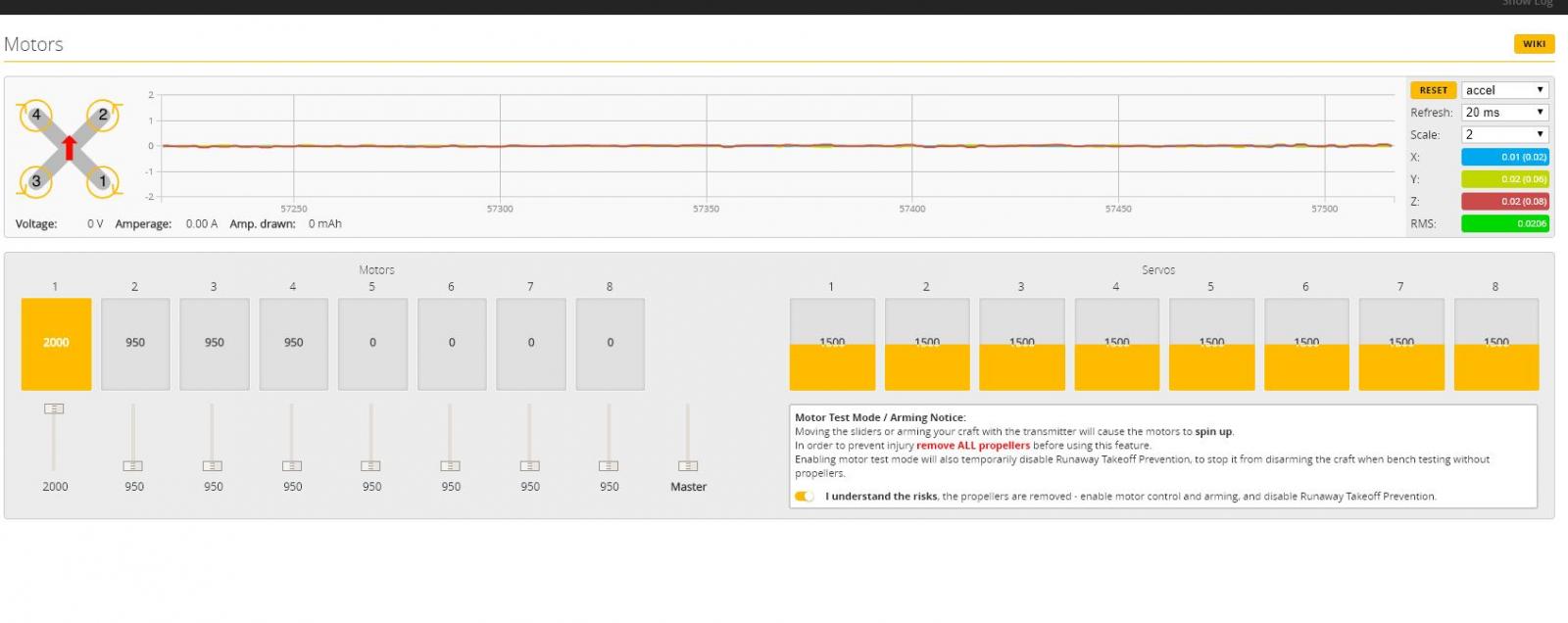
Pomierzyłem silniki:
I wszystkie 4:
Na moje źle to nie wygląda, ale nie będę udawał, że jakoś świetnie czuje temat.
-
A jakie masz śmigła? Coś markowego czy tania chińszczyzna?
Jakie masz odczyty akcelerometrów?
Gemfany 9x4,7 z mocowaniem DJI. Na ile to markowe nie wiem, ale na wyważarce źle nie wyglądały/
Polecasz coś konkretnego? Do samolotów ładuje zawsze APC, ale róznie bywa z dostępnością prawych śmigieł
Odczyty akcelerometrów pokażę później.
-
Dziś przetestowałem jak działa tryb 3D.
W dużym skrócie - ten quad może latać na plecach. Ale to nie znaczy, że powinien
Na pełnym gazie jest w stanie się ledwo wznosić na plecach, przy akompaniamencie morderczego wręcz hałasu
Za to programowanie regli było dobrą okazją, żeby o oczko podnieść startup power. Teraz flipy na wyłączonych silnikach stały się całkiem bezstresowe, bo regle startują jak należy, nawet gdy quad ma sporą prędkość pod włos.
Ale ja o czymś innym chciałem.
Wyważyłem śmigła na wyważarce (z grubsza, mają jajowate otwory, a to znacząco utrudnia porządne umocowanie na stożkach wyważarki), później poprawiłem badając odczyty akcelerometrów po założeniu na quada, a sam Runcam dostał piankę pod mocowanie.
Efekt jest taki:
Czyli wciąż można się porzygać.
Macie jakiś pomysł jak się pozbyć tych wibracji?
-
Hmm... jak spróbujesz 250 to na 450 będziesz mówił krowa...
Być może
Ale póki nie spróbowałem to mogę udawać, że o tym nie wiem i się dobrze bawić
No i super. Też skompletowalem już swoją 450, teraz ja tylko złożyć.
Pochwal się efektami
-
Czołgiem Panowie
Ostatnimi czasy robota przycisnęła mnie zdecydowanie zbyt mocno. Na tyle mocno, że jak się z kontraktu wywiązałem, to pojechałem na urlop i potrzebowałem zrobić coś innego dla odpoczynku (innymi słowy - miałem dosyć robienia modeli za pieniądze, więc dla odpoczynku zrobiłem model). W efekcie powstało coś takiego:
Czyli Quadzik 450tka zaopatrzony w najtańszy kontroler jaki znalazłem (całe 2USD na flash sale'u w HobbyKingu):
Najtańsze silniki ze zintegrowaną piastą:
I jakieś śmieszne regielki 25A śmigające na BLHeli_S
Do tej pory jakoś mnie quady nie bawiły, bo kojarzyły mi się głównie z wiszeniem w miejscu i proszeniem kolegów, żeby podeszli i popchnęli do przodu, żeby pokazać jak dobrze stabilizacja działa.
To co mnie pchnęło do zrobienia quada to odkrycie RunCama Owl. Moja idea jest taka, że pozwoli mi to pobawić się FPV na ograniczonej przestrzeni, kiedy dni już będą zdecydowanie zbyt krótkie.
Montaż całości był o dziwo bezproblemowy, nawet flashowanie regli z użyciem flight controllera nie przysporzyło problemów.
No i pierwszy lot (no taki postępowy, pierwszy lot w ogóle był w garażu, żeby sprawdzić czy wisi) wyszedł jakoś tak:
Czyli od początku nawet toto latało. Po paru lotach zdecydowałem zmienić się iNava na BetaFlight, bo okazało się, że na tej płytce i tak nie osiągnę dobrych wyników przy zabawach z GPSem (brak mocy procesora), a BetaFlight pozwolił podnieść taktowanie pętli sterującej (z 500Hz na 1,14kHz)
Pierwszy lot na BetaFlighcie wyszedł nad wyraz dobrze:
Może poza momentem kiedy odkryłem, że Quady też są podatne na wejście we własne strugi zaśmigłowe
A tak to działa już po pełnej regulacji:
Prawidłowo wyregulowany quad, nawet na tak atanich komponentach skutecznie ogarnia hardstopy po flipach itp.
Próbowałem też pobawić się nieco Runcamem:
Ale wyniki są słabe, bo wychodzi prowizoryczne wyważenie śmigieł, więc całość przyprawia o mdłości.
A jak ktoś dotarł tutaj, to ma bonusik:
Czyli co się dzieje jak Quada rozbroi się przez przypadek w locie (trąciłem pstryka).
Ogólne wrażenia są takie, że nawet całkiem dynamicznie można całość pogonić, włącznie z jakimiś ładnymi flipami, czy pętelkami.
Kiedy założę na to Li-Iona 3s3p to czas lotu przekracza 30min (przy wciąż niezłej dynamice), więc nawet będzie można tego użyć do powolnej eksploracji różnego rodzaju krzaków w FPV. O rezultatach latania w FPV poinformuje jak dostanę do łapek nowy nadajnik FPV (mój Bosscam został zamordowany pakietem po jednej z kraks Twinstara).
Zaletą jest też wybitnie tanie bicie w glebę. Części do ramy są za grosze, śmigła kosztują bardzo niewiele itp.
No i myślę też o jakiejś wyścigowej 250tce. Wydaje się mieć to niezły stosunek ilości zabawy do ceny
-
A jeśli grubość standardowego Oracalu (czyli formy reklamowej) Ci przeszkadza, to są rzeczy specjalnie do tego:
http://riku.pl/grupa/p/id/3747/kontekst/3747/Tylko kolorów mało
-
A zaczynasz z obrotów typowych dla lotu, czy niższych?
I czy masz prędkość postępową, czy nie?
-
Pewnie, coś w tym jest.
Ja,latając na mniejszych, zauważyłem, że łatwiej jest mi "złapać wiatr" na początku delikanie dając ujemne kąty i zwiększając je stopniowo do wysokich
Tu coś jest nie tak.
Tzn. Im masz mniejsze kąty tym dla danej prędkości ruchu postępowego w dół masz wyższe obroty (ale niższy moment które chce to obrócić).
Wchodząc głębiej w ujemne kąty, to obroty wirnika powinny spadać. Może to kwestia oporów samego heli? W 450-470 to jednak znaczenie ma, a na małych kątach obroty potrafią wzrosnąć i zaraz spaść.
Z kolei sterowanie cykliką ma dosyć prosty wpływ. Tzn. zaciągając drąga zwiększa się prędkość względem osi pionowej wirnika, więc tak jakby zmniejszało ujemny kąt, a oddawanie drąga go zwiększa.
Swoją drogą, polecam ten film:
Dosyć imponująco to wygląda
-
Póki co Trex sobie lata. Cholera wie ile lotów, ale już grubo ponad dwie setki (nie wiem, czy nawet nie ponad trzy). Jak na razie - tylko parę luzów eksploatacyjnych skasowałem
Fajna odmiana po tym po0przednim padle
Ale o czym innym chciałem.
W ten weekend stwierdziłem, że zajmę się w końcu autorotacją.
Do tej pory niezbyt mi się chciało, bo o 470tkę nieco się bałem, a 450tka jakoś autorotować nie chce.
Niemniej, tak wyglądały pierwsze trzy próby, które dotknęły ziemi (bo wcześniej nieco na wysokości próbowałem):
Głównym problemem jest jednak nawierzchnia lotniska, łatwo ogonem przyhaczyć :|
Do lądowania - coś jeszcze poradzę, ale do startu to lipa.
A tak wyglądało to po kilkudziesięciu próbach:
Później szło jeszcze lepiej, ale kolega zajął się sam lataniem to mu się nagrywać nie chciało
Koniec końców opracowałem technikę autorotacji z lotu postępowego, w taki sposób, aby przed samym lądowaniem zjeść energię kinetyczną wirnikiem. Jeśli mam wątpliwości co do podłoża, to odwracam się tyłem do kierunku lotu, dzięki czemu ogon jest wyżej od ziemi. Na betonei już nie było potrzeby tego robić, ale warto pamiętać, jakby jakaś awaria mnie zaskoczyła.
-
Problem polega na tym, że nie ma problemu
Ogólnie - format zapisu *.dat jest formatem bezwzględnym. Tzn. ma całkowicie zamurowany układ współrzędnych, gdzie nosek profilu zawsze POWINIEN mieć współrzędne 0,0, a profil zaczynać się i kończyć powinien na współrzędnych z X=1 i Y pasującym do grubości.
Profil który Ty omawiasz (i cała seria AG34-35-36-37-38) jest profilem przystosowanym do pracy w skrzydle konstrukcyjnym. Tzn. ma płaski spód i kanciata górną powierzchnie (gdzie powinny iść podłużnice).
Stąd jest on dostarczony w takiej formie, aby prościej go było wpakować na drewno do cięcia laserem..
Inne profile z kolei często są lekko skręcone, czy mają schrzanioną długość. Tu już wina lezy po stronie robiącego plik z profilem.
Stąd zawsze należy zrobić de-rotate, a później normalize (w tej kolejności).
Z reguły nie zrobienie tego skutkuje jedynie przesunięciem charakterystyki o zadany kąt. Problemem jest jednak, że czasem metoda VLM i 3D Panel potrafi się mocno sknocić właśnie przez to (jak w punkcie 10tym mojej pisaniny).
-
 albo na sztywno śrubami albo poprzez jakiś softmount (otwory zrobisz zwykłym wiertłem do metalu)
albo na sztywno śrubami albo poprzez jakiś softmount (otwory zrobisz zwykłym wiertłem do metalu)












{kind=link}
Jaki model pod silniczek emax cf2805
w Inne
Opublikowano
A mam nawet Tomasza na tym silniku. Wyposażony w oświetlenie i Li-Iona 3000mAh potrafi latać jakąś godzinę i kwadrans. Szczególnie lubię nim latać nocą, gdy są mrozy, bo wtedy powietrze nie porusza się w ogóle
Ale Tomasz, co by nie mówić, jest nieco nudnawy/relaksujący, więc polecam Ci Twirla:
http://my.pclink.com/~dfritzke/twirl.pdf
Też miałem na tym silniku i wrażenia są niezapomniane
Jedyna wada Twirla - nie lata na plecach
Poza tym same zalety, właćznie z lądowaniem na wyłączonym silniku i w pełni zaciągniętym drągu.
Obecnie zaś na tym silniku innego dziwaka ujeżdżam:
http://pfmrc.eu/index.php/topic/73827-laheli-rotorshape-ma%C5%82y-jednowirnikowy-wiatrakowiec/
Tym bardziej polecam, ale to już trzeba być świadomym, ze to nieco dziwaczne jest