






Patryk Sokol
-
Postów
3 201 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
78
Odpowiedzi opublikowane przez Patryk Sokol
-
-
Śmigła to trochę indywidualny temat.
Bardzo lubię te śmigła:
https://www.banggood.com/2-Pairs-T-Motor-T5143-3-blade-Propeller-5mm-Mounting-Hole-For-RC-Drone-FPV-Racing-Multi-Rotor-p-1309181.html?rmmds=searchFantastycznie się prowadzą i są dosyć wytrzymałe.
Możesz śmiało od nich zacząć
Ciekawe doświadczenia dają te śmigła:
https://www.hobbyrc.co.uk/azure-johnnyfpv-freestyle-tri-blade-props-greenNa nich quad bardzo szybko się zbiera do rożnego rodzaju podskoków.
Na początek możesz też spróbować tych:
https://rcmaniak.pl/pl/p/Smigla-HQProp-Ethix-S3-Watermelon-Props-Dwie-Pary-CW-CCW-/4018Zapewniają sporo dynamiki dla małej prędkości, później dają mniej ciągu.
Fajna sprawa do wywijania na małej przestrzeni. Koniec końców odszedłem jednak od nich, bo przy moim stylu latania solidnie obcinały czas lotu. Ale jak ktoś lata na mniejszym uptilcie to może je polubić.
Ostatnio jednak przez przypadek kupiłem paczkę tych śmigieł:
https://www.banggood.com/5-Pairs-T-Motor-T5150-5150-5-Inch-3-Blade-Propeller-POPO-Compatible-for-RC-Drone-FPV-Racing-Multi-Rotors-p-1414034.html?rmmds=search&cur_warehouse=CNI się nieco zdziwiłem.
Tzn. lata się na nich bardzo płynnie (łatwiej wyjść równo z nurkowania), a pobór prądu w ogóle nie wzrósł, więc mam taki sam czas lotu jak na 5143.
Chyba na nich jednak zostanę, bo są najwytrzymalszymi śmigłami jakie miałem od czasów Dalpropów 5x4 Bullnose'ów.
Niemniej - na początek chyba jedna Tmotory 5143. Nie żrą dużo prądu w locie poziomym, są wytrzymałe, a z racji tego, że są lekkie to ułatwiają regulację propwashu (silniki maja mniej roboty, żeby je rozkręcić)
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Nie znalazłem działu to chwalę się tutaj

Po 20 latach zabawy w modelarstwo naszło mnie na mój pierwszy latawiec skrzynkowy:
Jest to Wicher z zestawu Modelmaking. A z racji tego, że nie znam umiaru to jest to od razu podwójny Wicher
Konstrukcji jest wybitnie klasycznej:
Czyli listwy sosnowe, klejone na wikol, z połączeniami wzmacnianymi trójkątami wyciętymi z lipy.
Oba latawce połączone są w podwójny za pomocą dwóch listew sosnowych, które oprócz klejenia są fantazyjnie przewiązane syntetyczną nicią.
No i z racji tego, że nie podobała mi się idea wyciągania cellonu w domu, to zrezygnowałem z oklejania latawca papierem z zestawu. Zamiast tego przykleiłem syntetyczną tkaninę z pasmanterii. Wyszło znośnie, w powietrzu się nie będzie czego wstydzić.
Oblot niestety dopiero za dwa tygodnie (a i to jeśli wiatr dopisze, choć ostatnio z reguły wieje). Postaram się nagrać latawca w locie quadem. Tak dla urozmaicenia
-
 6
6
-
Lutuję lutownicą tego typu:
https://www.castorama.pl/lutownica-lg-500-grzalkowa-id-30402.html
Tylko, że nie współczesną, a starszą ode mnie (po dziadku).Używam do tego kwasu do lutowania.
Technika jest taka, że najpierw nakładam kwas na każdą cellkę z osobna, później bielę każdy minus po kolei, a później plus.
Kolejność biegunów, nie ma znaczenia, po prostu chodzi o to, żeby cellki miały jak najwięcej czasu między bieleniem.
Po pobieleniu, daję cellkom ostygnąć i bielę, w międzyczasie, plecionkę miedzianą.
Samo lutowanie to tylko jedno dotknięcie (magia dużej pojemności cieplnej grotu).
Po dojściu do wprawy cellki mogę trzymać w ręku w trakcie całego procesu, ledwo się nagrzewają.
-
Z wiekiem odporność organizmu spada i mnie również dopadła copteroza. Dlatego bardzo proszę Patryka aby kontynuował. Niekoniecznie musi to być sprzęt budżetowy. Proszę o inne przykłady ram, silników, regulatorów o dobrej i bardzo dobrej jakości. Mam pytanie do Patryka na temat wspomnianych ogniw LiIon. To są ogniwa 30A i czy one dadzą radę. Czy mówiąc o pakiecie 6s miałeś na myśli pakiet 6s1p?
Polecam kopiować moje setupy.
Najbardziej udany mój quad to zdecydowanie ten:
https://pfmrc.eu/index.php/topic/80000-kolejny-freestyleowiec-na-6s/
Fantastyczny setup do płynnego, szybkiego freestyle'u. Jedyna rzecz którą bym w nim zmienił to FC na ten:
Wadą tego setupu jest to, że wymaga dosyć dużo od pilota, bo ma spora bezwładność. Ciężko złożyć sprzęt w wyższej jakości niż ten quad.
W locie prezentuje się tak:
https://www.youtube.com/watch?v=WhW_SZG3wY4
Szybki, płynny, naprawdę lubię tego quada.
Drugi mój bardzo udany setup to ten misiaczek na 4s:
https://pfmrc.eu/index.php/topic/78888-quad-pod-dwukierunkowego-dshota/
Quad tańszy, lżejszy i bardziej skoczny, co widać na tym filmie:
https://www.youtube.com/watch?v=QiT3IdTZfgs
Ale ma do wymiany regle, bo trochę syfią.
Masz tam dwa setupy na 4 i na 6s, oba sprawdzone i przyjemne.
Jeśli chodzi o Li-Iony to one są dosyć ciekawym przypadkiem w kontekście zasilania quada.
Tzn. one nie oddają dużego prądu, trzymają też sporo niższe napięcie (lata się do 2,9-3V, a nie do 3,6-3,7V jak w LiPolach). W efekcie quad złożony na klasycznego 6s LiPola zachowuje się jakby ktoś założył mu pakiet 5s, co naprawdę mocno ogranicza prąd.
Kiedy zaś quad za wszelką cenę próbuje wziąć więcej, to zwyczajnei spada napięcie. W efekcie przy takiej konfiguracji ciężko przebić 45A poboru.
W efekcie mamy wtedy quada o sporo mniejszej mocy (nie żeby małej, to ciagle z 1,5kW mocy pod drążkiem).
Oczywiście pakiety sporo po tyłku dostają, ale... Te pakiety tak traktowane wciąż przeżyją 100-150 cykli, czyli tyle co LiPole traktowane zgodnie z tym co życzyłby sobie producent... A, że kosztują tyle co płatki kukurydziane? To tylko lepiej.
I tak ma na myśli pakiet 6s1p
-
F722-SE ma same zalety w kontekście Betaflighta, a przede wszystkim systemów FRSky'a. latwiej ogarnąc temat FPorta.
A co do silników, to już linkowałem. Niemniej masz jeszcze raz:
https://www.banggood.com/BrotherHobby-Returner-R6-2207-1750KV-2400KV-2700KV-4-5S-Brushless-Motor-For-RC-Drone-p-1286956.html?rmmds=searchMożesz jeszcze rozważyć też te silniki:
https://www.banggood.com/IFlight-XING-Camo-Pink-X2208-2208-1700KV-1800KV-2150KV-2450KV-Brushless-Motor-2-6S-For-RC-Drone-FPV-Racing-Multi-Rotor-p-1415953.html?rmmds=search&ID=47980&cur_warehouse=CNAle raczej zostałbym przy Returnerach, 2207 powinien być nieco mniej prądożerny, a mocy daj wystarczająco do mojego latania, więc na pierwszego quada to aż nadto
-
Betaflighta, właśnie ze względu na filtrowanie oparte o filtry środkowozaporowe sterowane z telemetrii ESC.
-
Rama już zamówiona. Tak wiec złoże na razie na tym co będę miał. I tak jeszcze nie umiem latać, tak więc dużo nauki mnie czeka. Zawsze mogę zmienić ramę jak będzie mi to doskwierać. A reszta podzespołów? moga być?.
Rama jest najtańsza w tym bajzlu, wciąż odradzam
To nawet nie jest kwestia nauki latania, to kwestia tego, że w goglach będzie Cię mdliło, bo tak obraz będzie na tej ramie w 7" falował. Bylem widziałem, nie polecam :|
Ale jak już koniecznie:
-Aparatura, RC, gogle - spoko
-Silniki - nie ten rozmiar zdecydowanie. Te silniki są w stanie pokręcić takim śmigłem, ale mają na tyle mało momentu (jak na quadowy silnik), że reakcja na pętle PID jeszcze pogorszy tendencję do wpadania w woble.
No i mam bardzo złe doświadczenia z TMotorami F40 ProII. Bardzo szybko popadąły łożyska, a szczelina między magnesami, a stojanem jest tak maleńka, że każde ziarnko piasku blokuje silniki.Może w ProIII to poprawili, ale to nie jest już mój (preferuje 2207, albo 2208, F40 to 2306) rozmiar silników.
Do tego quada 7" potrzebujesz coś w tym stylu:
https://www.brotherhobbystore.com/avenger-2507-v2-motor-p0082-p0082.html
-FC jest jak najbardziej ok, ale...
Ale nie polecam Arducoptera do 7". Jedyna szansa, żeby być może chciało to dobrze latać, to filtorwania oparte o dwukierunkowego Dshota (bo filtry lowpass muszą schodzić tak nisko w 7", że zaczynamy mieć problemy z opóźnieniem pętli PID, filtry środkowozaporowe dużo lepiej sobie tu radzą).
-regle - zdają się być ok. Najwyżej będą potrzebować kondensatory na zasilaniu (mam tak z UFOFPV. Bez kondensatorów masakrują video).
-Nadajnik - Jest ok, tylko drogi. Jego główna zaleta, to pewność, że nie przekraczasz 25mW, kiedy nadajnik jest na tę moc ustawiony. Potrzebne tylko do racingu.
Polecam Akk:
Połowa ceny, więcej mocy i do tego naprawdę niezawodny. Na 5 sztuk które kupiłem, cztery latają do dzisiaj. Piąta sztuka nie lata, bo leży gdzieś w lesie, ale na to to i TBS Unify nie pomoże
-Kamera - Eagle 2 jest <3. Ale... Ratel ma tę samą matrycę:
Więc identyczny obraz za mniejsze pieniądze. Tyle, ze do Martiana musiałbyś założyć przejściówkę:
-4ska z kolei to kolejny powód do cierpienia w quadzie 7".
W dalszym ciągu polecam Ci więc zrobić coś takiego:
-Kupić te silniki w wersji 1700kV- https://www.banggood.com/2-PCS-Micro-Camera-Mount-Bracket-for-RunCam-Micro-Sparrow-2-ProMicro-Eagle-p-1318078.html?rmmds=search&cur_warehouse=CN
I pożenić to z pakietem 6s LiIon z tych ogniw (i tak, naprawdę wychodzi 60zł za pakiet):
https://allegro.pl/oferta/sony-18650-vtc5a-30a-us18650vtc5a-8571260679
W ten sposób będziesz miał naprawdę dobrze i długo latającego quada, do którego zawsze możesz wstawić 6s 1300mAh Lipola i mięć praktycznie high endową maszynę do freestyle'u.
Jak pójdziesz w 7" to przygotuj się na solidne jello, nic w zamian nie zyskując.
-
Zacznę od czegoś zupełnie innego.
Mocno zniechęcam do robienia quada na 7" śmigłach.
Niestety ramy które są oferowane do 7" mają wciąż ramiona grubości 4mm.
Efekt tego jest taki, że zwyczajnie nie idzie tego wyregulować, bo co byś nie robił, to na kamerze jest masakryczne jello, a sam quad laka jak ściera na zaniżonych PIDach.
Przez dwa miesiące walczyliśmy z kolegą, żeby jego quada 7" (i to latającego na 6s) zmusić do sensownego latania i skończyło się zmianą ramy, silników i śmigieł. Teraz lata na 5" i lata pięknie.
Ogólnie to 7" nie ma dużej przewagi nad 5" quadem w czasie lotu, praktycznie żadną w możliwym do ogarnięcia dystansie (bo jeszcze nieco wolniejszy).
Popatrz zresztą tutaj:
https://www.youtube.com/watch?v=IMX8wrwRBvQ10 min lotu moim quadem 5", w dosyć trudnym terenie i z wcale nie mała dynamiką. Kiedy założyć na mojego quada pakiet 6s 2600mAh Li-Ion z ogniw Sony VTC5a to mogę śmiało latać i 20min z założoną kamerą.
-
Patryk. Zapomniałeś dopisać ze frezarke tez musisz sam sobie zbudować.
Wciąż się wtedy łapie do definicji. Oczywiście więc, że chciałem napisać tak od razu, tylko mi to umknęło, bo było zbyt oczywiste.
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Ech a Wy znowu o tym samym.
Wiecie jak ja uważam?
Nikt kto nie potrafi samodzielnie policzyć zestawu profili aerodynamicznych, później całego skrzydła, zaprojektować i wykonać form do zawodniczego motoszybowca, a później tego motoszybowca z formy, ten nie jest modelarzem, tylko składaczem jakiegoś planktonu.
Dzięki temu zostaję w tym ekskluzywnym klubie ja i może ze trzy osoby z forum, reszta nie ma prawa się modelarzami nazywać, najwyżej składaczami, a najczęściej kupującymi gotowce.
Że co?
Nie podoba się?
A to tylko dlatego, że nagle Drogi Składaczu już się do modelarzy nie łapiesz i nie możesz się wywyższać nad innych tym, że należysz do kategorii którą sam sobie dobrałeś.
Może teraz do Was dotrze jak bardzo bez sensu jest to gadanie?
Naprawdę tak bardzo potrzebujecie sobie podbudować własne ego, że musicie robić to kosztem innych?
Rozpatrywaliście kiedyś, że dla różnych ludzi modelarstwo to coś innego?
Na koniec dnia - jedyne co jest istotne to to, że bawimy się czymś co sami definiujemy jako model (czy to RC, czy na uwięzi, czy redukcyjny) i mamy z tego frajdę.
I proszę nie wyjeżdżajcie mi z tym, ze jak zrobi model z czegokolwiek to zrozumiem (zrobiłem dziesiątki modeli, z każdego możliwego materiału), czy po iluś tam latach doświadczenia zrozumiem, bo naprawdę - nie te progi.
Schowajcie więc sobie w (_!_) ten cały obrzydliwy gatekeeping i zwyczajnie cieszcie się z tego, że macie ludzi dookoła z którymi dzielicie wspólną pasję. Nawet jeśli jest to jedynie jej część którą jest latanie.
-
10
-
Tracker do quada freestylowego, czy tam racingowego to byłoby cierpienie.
Raz, że wszelkie moje próby użycia GPSa w quadzie kończyły się na tym, że nie chciało mi się czekać na fixa, żeby mieć zasięg na lot trwający trzy minuty (eksperymentowałem z GPS rescue).
Kolejną rzeczą jest to, że zasięg 5,8GHz w quadzie zwyczajnie wystarcza. Tzn. kiedy stosuję krótkiego helikala i pagodę w goglach to szybciej braknie mi prądu na powrót niż braknie zasięgu. Z kolei kiedy lata się po jakichś betonach i krzakach, to większy zysk anteny pomaga jakoś tak mało. Tzn. mało poprawia to jakość obrazu, wydaje mi się przez to, że odbiornik łapie jakieś dziwne odbicia (co widać po tym, ze gubiąc zasięg w ten sposób nie pogarsza się kontrast i nie uciekają kolory, tylko obraz błyska, rzuca kolorami itp).
Dziś za to rozwiązałem temat słabej jakości obrazu.
Okazało się, że to kwestia tego, że nadajnik w modelu pracował na nieco innej częstotliwości niż odbiornik. Wynikało to z tego, że maja dosyć różną tabele kanałów i zwyczajnie nie pracowaly na tej samej częstotliwości.. Ostatecznie dograłem kanał w modelu na B1, a przekaźnik na R8. Daleko odsunięte od siebie kanały i dodatkowo mój helikal bardzo lubi się z kanałem B1.
-
Moj helikal jest wprost z Prodrone :
https://shop.prodrone.pl/en_US/p/PRO-Helical-antenna-12-turn-5.8-GHz-14dbi/125
I, jak każda antena od Bartka, działa znakomicie.
-
Czołgiem Panowie
Jakiś czas temu latałem sobie szybowcem FPV w termice. Wszystko było blisko i nisko, ale jednak jakość obrazu wymagała ode mnie, żebym z grubsza celował goglami w model. Upierdliwe to było szczególnie gdy latałem nad głową.
Stwierdziłem więc, że trzeba zrobić sobie tracker.
Jako bazę wybrałem Zs6buja:
https://www.rcgroups.com/forums/showthread.php?2942118-Build-a-Reliable-and-Cheap-Antenna-Tracker-this-Weekend-%C2%96-by-zs6bujKtóry ma nawet repo na Githubie:
https://github.com/zs6buj/AntTracker
Kupiłem parę podstawowych rzeczy czyli:
-Blue Pilla STM32F1 - Płytka bazowa z procesorem F1 (podobno można użyć FC od quada, ale nie chciało mi się kombinować)-2 serwa Tower Pro MG966r 180st - straszny syf. Wolne, niskiej jakości, z luzami które nie przystoją zasuwie od wychodka. Jest duża szansa, że kupiłem podróbki w Abc-RC, bo podobno wręcz trudno kupić oryginały. Niemniej - do mojej anteny wystarczy
-2 moduły Bluetooth HC06 - i to był błąd... O tym później.
-Konwerter RS232->TTL
-BEC 5V - standard
-Najtańszy ekran OLED
-Trochę badziewia typu diody, rezystory etc.
Tak naprawdę - coś koło 100zł w częściach, groszę tak naprawdę.
Zacząłem id uruchomienia całości na biurku. I to było przeżycie. Strona która miała dostarczyć biblioteki do STMduino nie działała, posilłkowalem się Wayback Machine. Kiedy już uruchomiłem to okazało się, że na Blue Pilla nie można zmieścić bootloader Arduino i programu do trackera jednocześnie. Wgrałem więc całość przez konwerter USB-UART. I okazało się, że na mojego Blue Pilla najnowsza wersja programu trackera też się nie mieści. Okazuje się, że są dwie wersje Blue Pilla i mi się oczywiście trafiła ta co ma mniej pamięci
.Okazało się, że moge uruchomić tylko wersję sprzed rozpoznawania protokołu komunikacji, obsługi OLEDa. Skazałbym się więc na walkę ze sprzętem który nie jest w stanie mi powiedzieć co się z nim dzieje poza miganiem, bądź nie diodką...
Kupiłem więc płytkę Mapple Mini, który już ma pamięci dosyć.
Okazał o się oczywiście, ze trafiła mi się chińska podróbka, która nie jest w stanie się restartować przez puls DTR, więc nie da się automatycznie dostać do bootloader, przez port USB. Na szczęście wystarczy zrestartować ręcznie, odpuściłem sobie lutowanie rzeczy na tej płytce żeby to naprawić.
Na to już udało się wrzucić program w wersji 2.06 i nawet zmusić go do debugowania przez port USB.
I dobrze, nie chciało mi się już odpalać Windowsa XP w maszynie wirtualnej, żeby moja antyczna przejściówka USB->TTL chciała działać...
Teraz poszło już z górki...
No nie...
Wpiąłem się w tył modułu R9, w port oznaczony jako RS232, za pomocą przejściówki RS232-TTL, podpiąłem do Mapple i... I nic...
Po całonocnym dłubaniu w tym odkryłem, że port RS232 w R9 faktycznie wypluwa jakieś dane, ale tylko przez pierwsze 20s po uruchomieniu. Później pluje już tylko w kółko cztery te same znaki.
Dokumentacji co do tego portu nie ma oczywiście żadnej, bo w końcu po co, tylko jakieś nerdy w tym grzebią.
Stwierdziłem, ze trzeba się więc wpiąć w Smart Port w R9. A to znaczy jedno... Inwersja sygnału...
Wydłubałem więc prościutki inwerter z dwóch rezystorów i tranzystora.
To już zaczęło pluć czymś sensownym.
Nawet mojej komórce udało się to rozczytać, więc zerobiłem sobie od razu logger do Telemetry Viewera
Ale Mapple'owi już się nie udało.
Z jakiegoś powodu algorytm rozpoznawania prędkości portu szeregowego użyty w programie trackera nie był w stanie ogarnąć z jaką prędkością gada SmartPort. Zahardcodowałem baud rate więc na 9600 bodów.
Dalej niespecjalnie chciało działać, więc zablokowałem protokół na FRSky'u.
Dzięki temu w debugu zaczęły pokazywać sie zdecodowane dane z telemetrii z iNava.
Teraz przyszło na uruchomienie modułów Blue Tooth. Kiedy zacząłem konfigurować moduły HC-06, to okazało się, że uległym to on może być, ale żeby zainicjować obcowanie z innym takim samym, to już nie pójdzie...
Okazało się, że HC-06 pracują tylko w trybie slave. Jako master już działać nie będą...
Nie chciało mi się zmuszać HC-06 do zmiany upodobań (co wg. tylko niektórych jest możliwe) i zakupiłem HC-05, który już takich oporów nie ma.
Przy tym już poszło w miarę z górki, tylko trochę się musiałem naszarpać z Puttym, ale moduły zaczęły gadać ze sobą i nawet nawiązywać połączenie bez udziału użytkownika.
Zadowolony wziąłem całość, jeszcze na pająku, na zewnątrz. Podłączyłem, uzbroiłem i... I serwo od sterowania elewacją dostało padaczki i po minucie machania góra dół, macahć przestało i zamilkło...
Oczywiście - w moim pokoju nie idzie złapać GPSa, więc konieczne było zostawienie włączonego Twinstara w samochodzie przed domem i liczyć na to, że R9 przebije się przez ściany kamienicy.
Szczęśliwie - przebił się i mogłem testować.
Po wrzuceniu całości na debuga okazało się, że paczki telemetrii z iNava update'ują w każdej paczce pozycję w poziomie, ale średnio co piąty pakiet ma prawidłową wartość wysokości względnej, a pozostałe cztery raportują zero.
Czemu? Nie wiem, nie znalazłem odpowiedzi.
Biedny tracker odbierał to jako bardzo szybkie teleportowanie się modelu między zerową wysokością, a niezerową odczytaną przez GPSa i zmuszał serwo do wykonywania zdecydowanie zbyt szybkich ruchów.
Niemniej - i tak nie powinno się przez to spalić. A, że się spaliło, to wysupłałem kolejne drobne z kieszeni i zamówiłem nowe...
Dopisałem do kodu regułkę która odrzuca wszystkie pakiety z wysokością równą zero.
I po tym całość zaczęła działać.
Ogólnie - całość w kosztach poniżej 300zł. Gdybym od razu wiedział co robić to w 120zł bym się upchał.
Wtedy przyszła pora na mechanikę. Zaprojektowałem sobie coś takiego:
Oś azymutu wykonana na łożysku oporowym (mojej roboty), oś elewacji zawieszona a dwóch łożyskach maszynowych (te już kupne).
Całość wykonałem z HIPSu 4mm i PMMA 5mm, które wyciągnąłem ze śmietnika w firmie, w której pracuje i uratowałem od przemielenia na regranulat (więc eko).
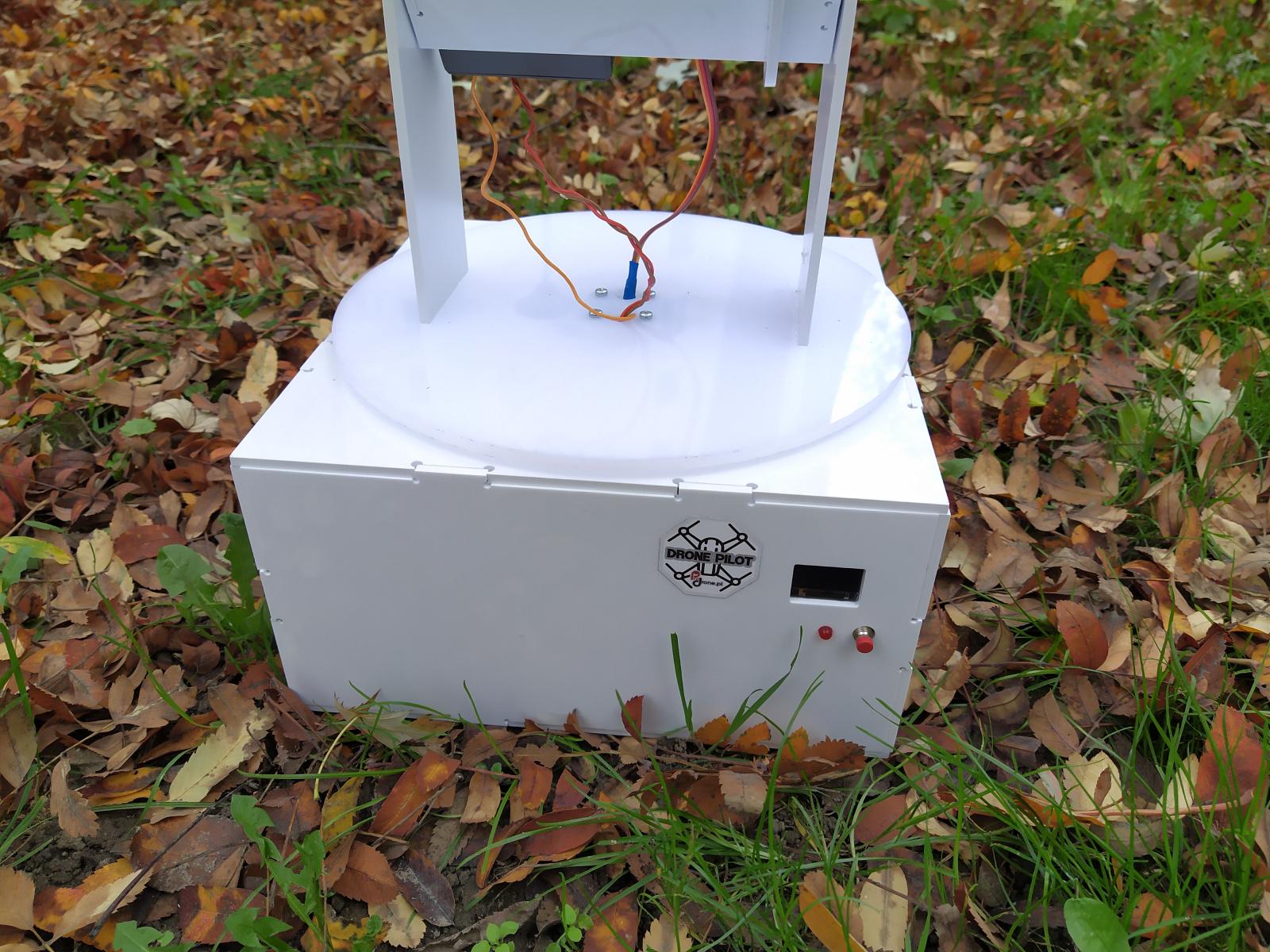
Całą konstrukcję wyfrezowałem na frezarce CNC i powstało coś takiego:
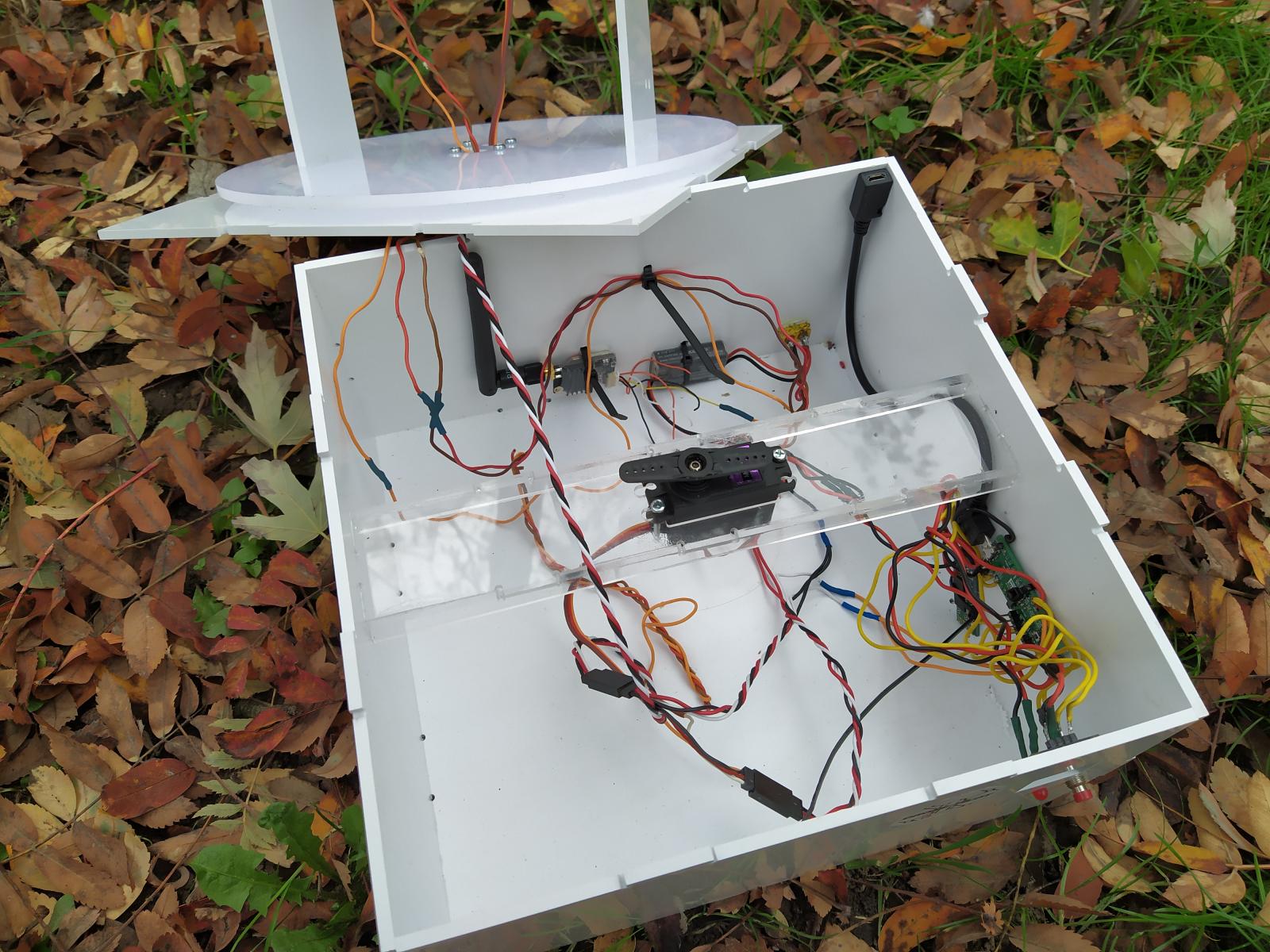
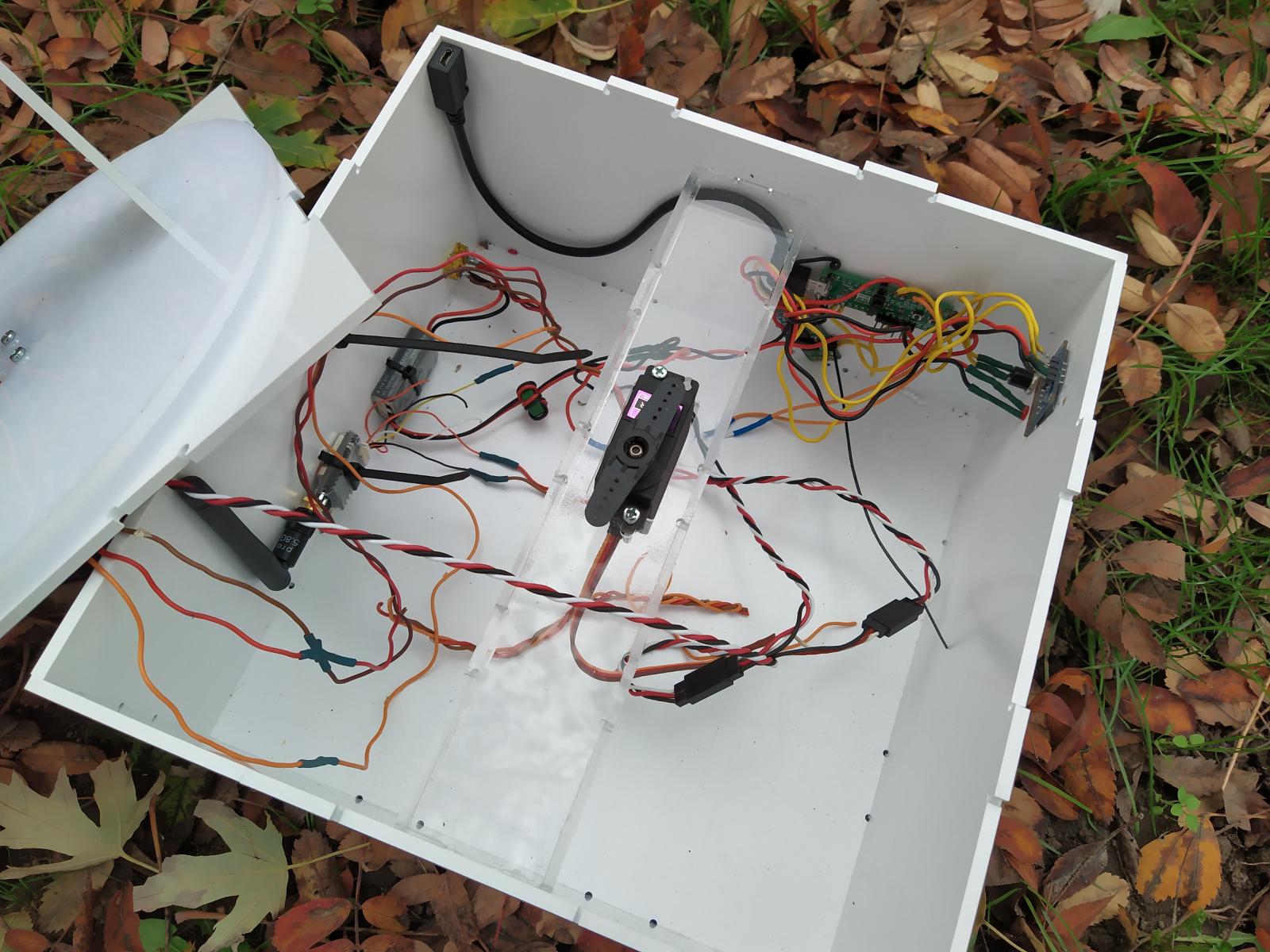
A tak to wygląda w środku:
Miałem uprzątnąć ten bajzel w kablach, ale chyba mi się nie chce
Całość zrobiłem tak, że zasila się z dowolnego pakietu 3s,a do środka jest swobodny dostęp.
Obecnie jako odbiornik zastosowałem Boscama RC835, a jako nadajnik PandaRC pracującego na 25mW. Idea jest taka, żeby nie ciągać kabla do gogli, tylko robić retransmisję.
Sukces jednak jest połowiczny. Tzn. Teraz z użyciem anteny 14dBi mam idealnie taką samą jakość obrazu w każdym zakątku nieba nad głową.
Ale - mimo anteny 14dBi zasięg jest mizerny, a jakość obrazu spadła.
Do sprawdzenia jest czy jest to kwestia retransmisji i nadajnik na 25mW i odległym kanale drażni jednak odbiornik i negatywnie wpływa na odbiór (czyli na próbę trzeba by się wpiąć w FatSharki kablem, blech...), czy zwyczajnie Boscam jest żałośnie niskiej jakości.
Jeśli by tak było to pewnie wstawię w tracker swój obecny moduł do Fatsharków, czyli TrueD, a Fatsharki dostaną Rapidfire'a.
Pewnie najlepsze rozwiązanie, ale dosyć drogie.
Niemniej - tracker antenowy sobie zrobiłem, tor analogowy to już mniejszy problem
-
Źle. I wcześniej już napisał dlaczego (ten kawałek w tekście z potęgą liczby 2)
-
E nie, tu nie ma co dyskutować.
To tak jakby twierdzić, że wypełnienie balowe między pasami dźwigara ma mieć słoje równolegle do pasów, a nie prostopadłe do nich. Jak się ma jakąś wiedzę w temacie to się z tym nie dyskutuje i nikt nigdy nie dyskutował, prawda?
Tkanina z włóknami ortogonalnie nie będzie lepsza na
zginanie niż tkanina z włóknami ułożonymi diagonalnie, a jedynie gorsza na skręcanie.
Kiedy masz układ ortogonalny to pół włókien nie robi nic, a pół niesie ściskanie na górze skrzydła i rozciąganie skrzydła.
Kiedy masz diagonalny to oba kierunki w tkaninie pracują po równo.
Będąc precyzyjnym to tkanina ściskana diagonalnie ma sztywność jak 2^-2 w osi włókien, ale liczysz ich dwa razy więcej, względem orientacji ortogonalnie, bo wszystkie pracują.
Ogólny wniosek jest zaś taki, że wszystko poza dźwigarem powinno mieć włókna skośne. Traktowanie też całego poszycia jako dźwigara jest mało rozsądne, bo poza najgrubszą częścią skrzydła włókna ułożone wzdłuż osi skrzydła niespecjalnie pracują, bo warstwy są za mało odsunięte od siebie.
PS. I nie wyjeżdżaj z oklejanie pianki folią, to nie jest rozsądne.
PS. 2 wiem, że przyjąłem sztywność w kontekście wytrzymałości skrzydła, ale to wynika z tego, że poszycie na skrzydłach VB nie niszczy się od przekroczenia wytrzymałości na ściskanie/rozciąganie, a przez wyboczenie i utratę stabilności na piance.
-
Już od dłuższego czasu nie.
Ten etap życia już zamknąłem dawno temu
-
Czy mi się chce do tego wracać...
Hmmm... A co mi tam... I tak sobie dłubie bezogonowce teraz
Ogólnie - profile samostateczne (umownie przyjmujemy, że to takie, które dla zerowej siły nośnej mają dodatni współczynnik momentu pochylającego, czyli chcą podnieść krawędź natarcia) działają tak jak każde inne.
Różnica polega na tym, że sam ogon profilu ciągnie w dół:
Tutaj widać jak górna powierzchnia profilu ciągnie do góry, aż do samego spłwu, gdzie nagle linia ciśnienia spada powyżej zera i generuje ujemną siłę nośną. Oczywiście sumarycznie profil ciągle jest na plus, ale to że sam spływ ciągnie do dołu generuje nam stosunkowo niewielki ubytek siły nośnej, a duży moment pochylający (bo ramię na który działa ujemna siła jest duże).
Oczywiście - pytanie w kontekście jak działa taki profil w kontekście produkowania siły nośnej jest średnio zasadne. Tzn. działa jak każdy inny, odchyla strumień powietrza w dół. Tyle, że dla zachowania równowagi momentów poświęca część siły nośnej na rzecz stabilizacji.
To zresztą pokazuje podstawowy problem wszelkich konstrukcji które wymagają tego typu profilu (głównie planków, klasycznych latających skrzydeł już sporo mniej). Tzn. im mają mieć większy kąt natarcia tym więcej momentu musi generować spływ. W efekcie im chcemy więcej siły nośnej, tym mamy bardziej zepsuty profil (bo to przecież jak klapa wychylona do góry). Efekt jest taki, że planki mają fantastyczne osiągi w locie szybkim (bo wtedy główne opory to opór profilowy i stateczniki, a tych plank nie ma), a im wolniej próbujemy latać tym planki robią się gorsze.
A co do grubych profili...
To nie jest generalnie tak, że grube profile produkują więcej siły nośnej, czy mniej chętniej przeciągają. Jest taka najwyżej tendencja (tzn. raczej tak jest). W praktyce znacznie większy wpływ na sam charakter przeciągnięcia ma promień noska profilu.
Niemniej - to pytanie jest niekoniecznie związane z tym jak powstaje siła nośna, bo powstaje tak samo.
To bardziej podpada pod ten wątek:
https://pfmrc.eu/index.php/topic/59972-tajemnica-liczby-reynoldsa-przep%C5%82yw-laminarny-przep%C5%82yw-turbulentny/Tu trochę mówię o charakterystyce przeciągnięcia. Jak po przeczytaniu tego będziesz miał kolejne pytania to napisz tam, ten wątek chciałbym utrzymać w stanie jak najbardziej podstawowym, żeby ludzi szukających podstawowej wiedzy nie straszyć trudnymi terminami.
A jeśli chodzi o kwestie bezoogonowe, to zapytaj może tutaj:
https://pfmrc.eu/index.php/topic/59050-o-stateczno%C5%9Bci-bezogonowc%C3%B3w-s%C5%82%C3%B3w-kilka/Zacząłem ten cykl, miałem problem z kompem i nie skończyłem. Może jak mi pozadajesz tam parę pytań to temat skończę
ps. Zanim ktoś się czepi - SS od samostateczny
-
1
-
-
Model nie był budowany jako model wyczynowy lecz do latania rekreacyjnego w górach.
Ale to nie zmienia, że kiedy już bawisz się w VB to możesz zrobić dowolne profile (na tym skrzydle co najmniej 2). Tu już nie ma dyskusji na temat tego, czy można odwzorować profil czy nie. Tak samo grubość nie jest problemem.
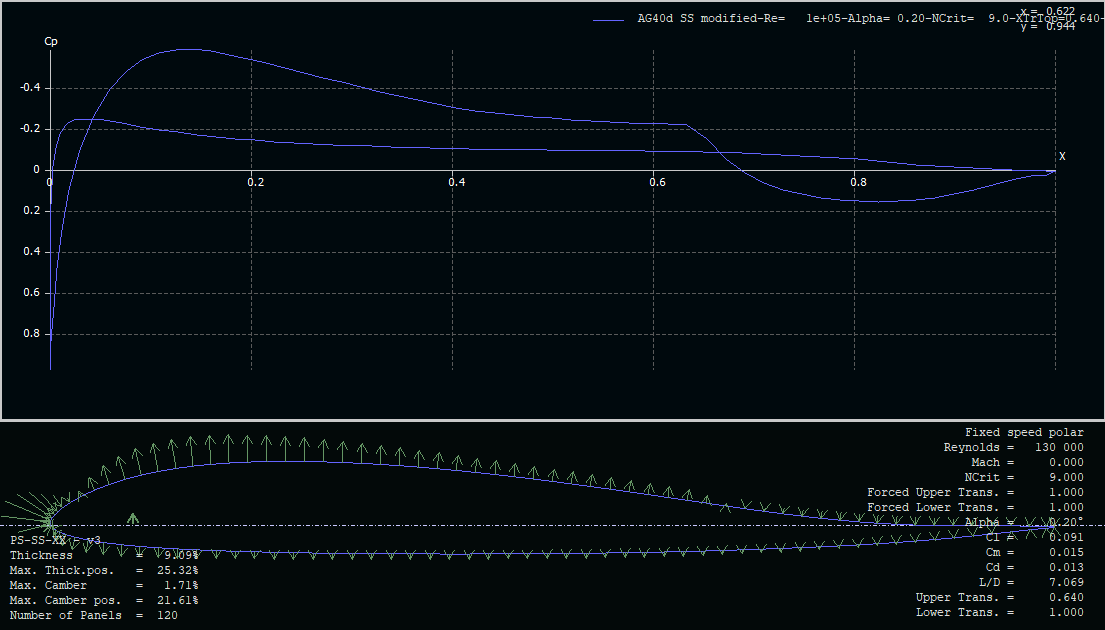
Wrzuć na nasadę AG40d, na końcówkę AG42d i uzyskasz znacznie lepsze osiągi, lepszą charakterystykę przeciągnięcia oraz sporo lepszą reakcję na klapy.
Nie zmieni to trudności wykonania, nie kosztuje nic, a uzyskasz model który po prostu lata lepiej, bez żadnych negatywnych efektów.
A co do rozmiaru - fakt, że 3m lata zwyczajnie lepiej, ale 2m to bardzo lubiany przeze mnie rozmiar. Targanie 3m kloców na wyprawę w góry z rowerem jest dosyć upierdliwe, a 2m można z sukcesem przyczepić rozłożonego do plecaka i wtargać w różne dziwne miejsca.
Ogólnie - odkąd mój Hammer na customowym profilu został w górach (przedwczoraj
) to chętnie bym przygarnął jakąś dwumetrówkę. -
Raczej szkło na styrodur metodą VB.
Dodatkowo widzę, że splot tkaniny ułożony ortogonalnie (0/90st względem osi skrzydła), zamiast diagonalnie (+/-45st).
Profil z kolei już nieco archaiczny. Przy zabawie w kompozytu warto pójść w coś nowocześniejszego, inaczej trochę pracy szkoda.
-
Cześć,
Czy jest ktoś z Warszawy skory do tego żeby się spotkać i przetestować mój nadajnik FPV? Mam niestety tylko jeden odbiornik na USB wątpliwej jakości - to jakiś no name "5.8G UVC Receiver" i niezależnie od mocy nadajnika, zasięg jest zawsze tak samo beznadziejny - kilkanaście metrów... Będę bardzo wdzięczny za pomoc - w zależności od tego będę reklamował nadajnik albo wymieniał odbiornik na nowy.
Poszło PW
-
Drifter jest dokładnie tym czego szukam. Duży, rozsądny profil, nie muszę dłubać konstrukcji
Najpewniej sobie kupię sobie go na święta.
-
Nie no - dobrze wykonane styro-fornir odwzorowuje całkiem nieźle. A zarówno ArtHobby, jak i Blejzyk mają to wykonane nieźle. Wiadomo, że coś ucieknie, ale podstawowe cechy, czyli grubość, ugięcie i ich rozkłady będą zachowane. A to już nam zapewnia sensowne zachowanie profilu.
Niemniej - źle wykonany styro-fornir... To już limitów nie ma, ale to się tyczy każdej technologii
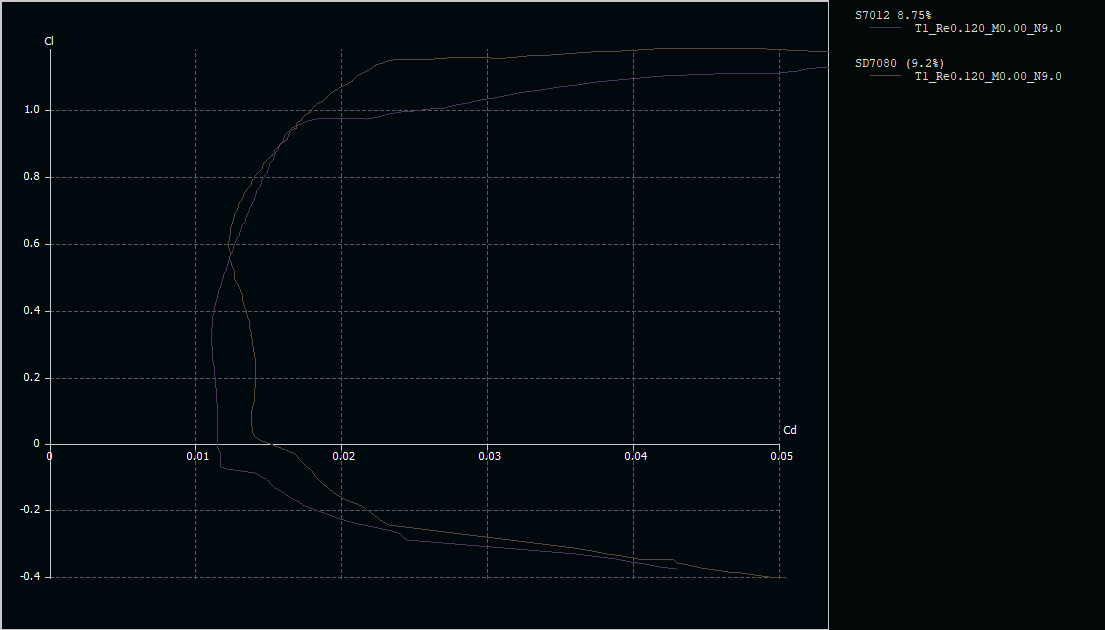
A możesz wygenerować taką biegunową dla modelu Vampire od Blejzyka z profilem S7012 i masą do lotu około 2200g? Powierzchni płata niestety nie znam w tym momencie.
Mogę:
W dużym skrócie - całkiem niezły profil do szybkiego latania, z całkiem wredną charakterystyką przeciągnięcia
Tutaj w porównaniu z SD7080, który jak widać gorzej leci do przodu, ale wchodzi na wyższe Cz.
Ale... Jeśli chcesz więcej, to możesz zrobić to sam:
https://pfmrc.eu/index.php/topic/60157-xflr5-podstawy/page-1 -
Sympatycznie ta ramka wygląda muszę powiedzieć... Mój Marmotte też był taki ładny, zanim został przykryty warstwą trawy...
Nie wiem na ile te kawałki tworzywa są przydatne, śmigła i tak wywalają syf na zewnątrz (i na kamerę...).
Aczkolwiek weź pod uwagę, że tak jak dałeś oringa, to nie izolujesz FC od drgań, potrzebujesz jeszcze nad FC.
Tyle, że Kakute F7 i tak ma amortyzowany żyroskop, więc to nic nie zmienia
-
Pewnie, że może zostać tak dolutowana masa nic nie zrobi.
-
1
-







 .
.



Pierwszy copter FPV
w Multikoptery
Opublikowano
Kup i testuj to tania rzecz
Ogólnie to ciężko mówić o wpływie samego rozmiaru śmigła na osiągi.
Dla przykładu 5147 HQ i T-Motor to śmigła skrajnie różne od siebie. I w prowadzeniu, i w obciążaniu silnika. Na HQ quad dobija 120A poboru prądu (na 6s :| ), a przy Tmotorach amperomierz zamyka się na 90A
Z kolei Tmotory 5143, 5147 i 5150 mają wspólną ze soba tylko średnice i nadruk producenta. Zupełnie inna geometria łopatki
Wyżej napisałem o śmigłach których używałem i o których warto było coś napisać, testowałem masę innych śmigieł, ale nie zostały u mnie na dłużej.