






Patryk Sokol
-
Postów
3 201 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
78
Odpowiedzi opublikowane przez Patryk Sokol
-
-
Coś nie zadziałało, nie widziałem tego posta i chciałem napisać jeszcze raz.
Jak komuś się chce, to może to usunąć.
-
1 minutę temu, Kamyczek_RC napisał:
Co do graupnera jeśli nawet dał by mi możliwość polecenia w kosmos to tego nie zrobię przede wszystkim ze względu na bezpieczeństwo innych .
Wypadek może się zdarzyć każdemu , tu masz rację tyle że stopień ryzyka jaki podejmuje pilot F3F do operatora drona który leci 15km jest 100-krotnie mniejszy . Poza tym mi w oko może wpaść mucha mam dwa
") operator drona zobaczy śnieg i jest do widzenia
operator drona zobaczy śnieg i jest do widzenia
A Ty dalej chrzanisz o tym samym. FPV to nie tylko latanie daleko! Ale jak już ustaliliśmy, nie masz pojęcia o czym mówisz
Nie wspominając o tym, że jak mucha wpada do oka, to zamykasz oba, chyba że jesteś kameleonem, czy innym reptilianinem.
Poza tym... jak zobaczy śnieg, to wróci na 15ście sposóbów, zaczynając o telemetrii, poza powrót autonomiczny
1 minutę temu, Kamyczek_RC napisał:Kolego widzę znaczącą różnice pomiędzy modelarzem a operatorem drona i FPV o ile 99% modelarzy poleci dronem bez większego przygotowania to 99% operatorów dronów nie poleci modelem rc bez gogli i FPV .
Poza tym tak jak napisałem różnica ryzyka jakie podejmujemy i stanowimy jest 100 krotnie większa a rozsądek jaki cechuje modelarzy stawia ich po odmiennej stronie barykady .
Bzdura po raz kolejny, jak latasz blisko, to ryzyko jest takie same (dla modeli z doczepionym FPV), bądź mniejsze (jeśli mają jakikolwiek FC
1 minutę temu, Kamyczek_RC napisał:Kolejna sprawa czy na jakimś forum FPV jest dział modelarstwo lotnicze ? Jeśli nie to dlaczego na forum modelarskim ma być dział o dronach i FPV .
I już zupełnie na luzie czy ktoś zabrania koledze uczestnictwa w forum FPV i bycia modelarzem na PFMRC?
A jak doczepię Ci do modelu F3F kamerę z wbudowanym nadajnikiem, to od razu przestanie być modelem?
W sumie... Uważaj... Mogę czaić się w krzakach jak będziesz latał z taśmą dwustronną i kamerkami. W końcu drona nie dotkniesz, a jak będzie miał FPV, to modelem nie będzie. Brzmi jak dobra zabawa
1 minutę temu, Kamyczek_RC napisał:Co do lepszego gdyby kolega czytał forum to by wiedział że to pierwszy temat w którym potrafimy stać po jednej stronie i pod jego decyzją podpisuję się również .
My to znaczy kto? Trochę złudzenie fałszywej powszechności Cię kolego dopada...
Zrozum człowieku wreszcie, że FPV nie musi oznaczać long range'a, przepisy można łamać każdym typem modelu, a nawet na Twoim Graupnerze po telemetrii da się wlecieć na lotnisko.
-
Ale co ma piernik do wiatraka?
Ja nie mówię o anarchii, braku zasad itp. Mówię o niezakazywaniu.
Kamyś chce po prostu zakazać FPV, a ja jasno mówię, że to jest po prostu głupie.
Jak ktoś lata modelem RC w zasięgu wzroku i w odpowiednich miejscach to jakie ma z znaczenie czy lata z FPV, czy bez?
Ja nawet nie próbuje wchodzić w dyskusje o lataniu daleko poza zasięgiem wzroku, nie o to mi chodzi.
Tak samo - jak ktoś lata nad samochodami, nad głowami itp. to tak samo uważam, że należy mu się solidna reprymenda.
Oczywiście nie chodzi mi o lincz, chodzi mi o pogadanie i uświadomienie (a jak to nie pomaga, to wtedy inne kroki).
jak najbardziej jestem za bezpieczeństwem.
Jak najbardziej uważam, że nie ma rzeczy nadrzędnej nad bezpieczeństwo.
To czemu jestem przeciwny to zrzucanie winy na którąkolwiek część naszego środowiska, jako tę głównie winną.
A przede wszystkim jestem za tym, żeby edukować. Powszechnie, zawsze i we wszystkim.
Nie ma znaczenia czy mówimy o bezpieczeństwie drogowym, lotniczym, czy posługiwaniu się nożem.
Tak więc żeby była jasność - jak kogoś z Was przyłapie na lataniu w mieście czymkolwiek z istotną wagą, nad samochodami, nad ludźmi to nie będę siedział. Paru się już przekonało, że nie odpuszczam dopóki się nie przestanie.
-
20 minut temu, Kamyczek_RC napisał:
Patryk mogę być dla ciebie szowinistyczną świnią , ale zdania nie zmienię
No i co tu dalej dodawać? Sam się przyznajesz do tego, że Twoje zdanie jest niewiele warte, bo nie jest podparte racjonalnym myśleniem.
Zresztą jakbym tego nie wiedział, tak naprawdę nie dla Ciebie to piszę, tylko dla tych co nie mają zdania.
Ale doceniam, że możesz dla mnie być szowinistyczną świnią. To urocze, że robisz to dla mnie i miło mi, że tak się starasz ?
Cytat,brak świadomości to żadna wymówka tym bardziej że ryzykowne zachowania w środowisku operatorów i FPV rzadko albo nigdy nie spotykają się z jakimikolwiek słowami krytyki a jedynie z aprobatą i sympatią . Jeśli więc sami nie dbacie o tworzenie wizerunku ludzi rozsądnych , zorganizowanych i przestrzegających jakiś umownych zasad nie oczekujcie że będziecie w taki sposób postrzegani przez otaczające was otoczenie .
A skąd wiesz z jaką reakcją się spotykają?
Widziałeś co się z komentarzami pod filmami, które przedstawiają coś głupiego?
Pierwszy przykład z brzegu:
Zobacz co się dzieje w komentarzach pod filmem. Gość jest mieszany z błotem niczym, niczym alkohol z wodą.
I pod każdym filmem z takimi głupotami dzieje się taka dyskusja.
KAŻDY film z FPV, gdzie łamane są przepisy, albo choć zdrowy rozsądek ma taką dyskusję w komentarzach.
Więc Kamyś, daj sobie spokój. Nie masz pojęcia o czym mówisz, nie masz pojęcia jak wygląda dyskusja w temacie FPV, nie wiesz nawet jak za pomocą swojego Graupnera dokonać przelotu na naście kilometrów
Wypadek moze zdarzyć się każdemu. Nie odpowiadam za wypadki innych w FPV, tak jak Ty nie odpowiadasz za ostatni wypadek śmiertelny w F3F.
Nie stosuj odpowiedzialności zbiorowej, bo sam kiedyś będziesz jej ofiarą. Niekoniecznie jako modelarz, zawsze jakaś grupa się znajdzie, jak się kogoś nie lubi.
-
3 minuty temu, jarek996 napisał:
Gdyby przy wlaczaniu gral "South of Heaven " lub chociaz "Jump" , to moze TEZ zaczalbym latac quadami
O, to teraz Cię za słowo trzymam:
Black Sabbath też się znajdzie:
Acz ze smutkiem stwierdzam, że quadowe silniki grają trochę wysoko na metalowe brzmienia (bo wtedy to ja bym zrobił trzeciego quada, na czarno, który grałby riff z Blues Beatdown Acidów)
-
 1
1
-
-
13 minut temu, Kamyczek_RC napisał:
Może mi kolego wytłumaczysz jak bez FPV polecisz 2 km od siebie dronem , jak będziesz nim sterował gdy będzie przypominał czarną kropkę na horyzoncie .
I to, że nie wiesz jest tu najzabawniejsze.
A jednak z radością się wypowiadasz*
A co do dalszej części postu, to mam to odebrać jako rzucenie ręcznika w dyskusji?
Bo nie odniosłeś się do moich argumentów. Rzuciłeś paroma przykładami na temat niebezpiecznego zachowania latających dronami, co ma świadczyć o czym?
Bo rzecz polega na tym, że dla każdej grupy znajdziesz kogoś kto zachował się nierozsądnie. Rowerzysta, szybownik, polot ultralekkiego samolotu, dla każdej z tych grup były przypadki zachowania nierozsądnego.
Ale dobry boże ateistów - To nie pozwala oceniać wszystkich!
Zdajesz sobie sprawę ile ja widziałem, przez 20 lat zajmowania się tym, głupot robionych przez pilotów klasycznego RC? Ile sytuacji niebezpiecznych?
Bo teraz albo się ze mną zgadzasz, albo uznajemy, że sam jesteś nieodpowiedzialnym debilem (czyli tak jak Ty traktujesz ludzi od FPV). Tylko dlatego, że ktoś INNY NIŻ TY, często NIEŚWIADOMIE zrobił coś głupiego za to TOBIE należy zakazać tego co lubisz.
To co prezentujesz, to właśnie typowy szowinizm, gardzisz całą grupę, która ani nie jest monolitem, ani nie jest charakteryzowana przez to czym gardzisz.
I to jest zwyczajnie obrzydliwe.
*Mogę opisać jak to zrobić, ale nie tu.
-
 1
1
-
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Ech Kamyś (tak Kamyś, nie obchodzi mnie ile jesteś starszy, na uszko mógłbym Ci wyszeptać jeszcze czulej), Ty dalej rzucasz te swoje przepełnione ignorancją brednie...
Zamiast zastanowić się co się dzieje i z czego to wynika, to znalazłeś sobie najprostszego kozła ofiarnego. Żadnych niuansów, żadnych niejasności, dla Ciebie sprawa jest oczywista, bo najwyraźniej kiedyś było lepiej.
A prawda jak zwykle jest bardziej złożona niż jedno zdanie.
Zacznijmy od podstaw - jest bardzo mało prawdopodobne , że obecne zmiany w przepisach mają wynikać z problemu bezpieczeństwa. Tak naprawdę szukałbym tu lobbingu korporacyjnego (Amazon i DHL, głównie).
Kolejną kwestią jest to, że obecnie informację rozchodzą się dużo, dużo szybciej. A gwarantuje Ci, że to bardzo łatwy temat, bo ludzie robiący głupie rzeczy sami jeszcze dostarczą materiału video.
Gdyby za "moich czasów" (czyli przełom lat 90tych i 00) ktoś kręcił wyczyny moje i kolegów z modelarni, to była by to dużo lepsza pożywka niż filmy z dronami. A czy mi dziś głupio z powodu tych wyczynów, pokroju używania bloku mieszkalnego jako zbocza? Pewnie, że głupio, ale jak ma się wczesne naście lat to świat wygląda inaczej.
No i incydentów z bezpilotowcami jest mniej niż z małym lotnictwem, tego też chcesz zakazać
Kolejną rzeczą której nie zauważasz, to to, że teraz latanie czymkolwiek jest daleko bardziej popularne, niż kiedykolwiek indziej. Stało się tanie, łatwo dostępne i przede wszystkim atrakcyjne. Tak naprawdę nie słyszy się o wyczynach ludzi z modelami FPV własnej produkcji, quadami freestyle'owymi itp. Słyszy się jedynie o rzeczach kupowanych na gotowo.
I to jest powód dla którego tyle się o tym nie mówi na forach FPV, jak ktoś już na forum FPV wszedł, to wie co jest głupie i zwyczajnie zachowuje się rozsądniej.
I tu pojawia się pytanie co zrobić z kupowaniem zabawek które mogą latać. Moim zdaniem na pewno nie zakazywać. Należy EDUKOWAĆ, powszechnie.
I teraz Kamysiu zauważ jedną rzecz. Jak zakażesz FPV, to nie spowoduje to, że ludzie przestaną się tym zajmować, bo nie tak działają ludzie. Spowodujesz jedynie, że wiedza o tym co jest bezpieczne, a co nie jest bezpieczne zostanie głęboko zakopana jako nielegalna, gdzieś obok przepisów na amfetaminę. Tyle, że amfetaminę dalej się robi, zakazanie nie pomogło...
Kolejna rzecz, wcale nie trzeba:
Cytatnależy surowo zakazać FPV ,bo jego brak znacząco ogranicza możliwość wykorzystania drona w sposób niebezpieczny
Bo gdybym miał ochotę zawieźć coś w jakieś miejsce, to spokojnie wystarczyłaby mi telemetria Graupnera i antena kierunkowa do WIFi. Tego też będziesz zakazywać?
A to, że Ty nie wiesz jak, to już Twój problem, wystarczy znać się lepiej.
Analogicznie wygląda kwestia zakazywania waypointowania po GPSie. To jest coś co zmontuje w domu każdy kto potrafi trzymać lutownicę. Zakazanie nic pomoże.
No i na koniec perełka.
F3F też należy zakazać po ostatnim wypadku śmiertelnym?
A może mamy zakazać samochodów? Od tego dopiero ludzie giną, jakby jeździli rowerami to byłoby bezpieczniej.
Zmierzam generalnie do tego, że znalazłeś sobie prostackiego kozła ofiarnego. Nie poświeciłeś 5min myślenia nad zjawiskiem, czy problemem, Ty już od razu wiesz co jest złe, bo się na tym nie znasz i nie rozumiesz.
Pod tym względem nie różnisz się od innych starych dziadów, którzy jedyne co robią to narzekają jak to kiedyś było lepiej.
Takie pełne kółko, jak dziecko co nie chce, bo nie lubi.
A prawda jest taka jak zawsze. Nie powinno Cię obchodzić Cię czy ktoś lata FPV, czy lata F3F, czy lata F3F za pomocą FPV (latałem, fajna zabawa. Polecam, może zrozumiesz co ludzie w tym widzą), tak jak nie powinno Cię obchodzić czy osoba latająca jest różowa, niewierząca i arsseksualna. Powinno Cię obchodzić czy robi to bezpiecznie i z poszanowaniem dla innych. Tak długo jak latamy bezpiecznie, tak długo jesteśmy jednym frontem których łączy wspólna pasja i który razem powinien pomagać sobie w odnalezieniu się w nowej sytuacji prawnej w której się niedługo znajdziemy.
A jeśli dalej będziesz pozbawionym empatii, szowinistą tak dalej będę Cię nazywał Kamysiem. Chcesz szacunku ode mnie, to szanuj innych (i nie mów, ze nie chcesz, inaczej Kamyś by Ci nie przeszkadzał).
A co do wypowiedzi Latacza...
To samo, znalzłeś sobie kozła ofiarnego. Ale najzabawniejsze jest to, że pamiętam jeszcze dyskusje na temat elektryków, które wyglądały dokładnie tak samo. Jeszcze na preclu ludzi się żarli o to jak nic nie trzeba umieć, żeby latać elektrykami i jakie to stanowi zagrożenie.
-
 8
8
-
Obecnie uznaje, że skończyłem swój mały programik badawczy. Tzn. polatałem quadami solidny sezon, ogarnąłem co mi się podoba i jak chce latać, więc ograniczam flotę.
Tzn. pozbywam się wszystkich swoich quadów freestyle'owych (stąd sprzedaż 4ski np.) i zostaje tylko przy swojej ulubionej konstrukcji, czyli właśnie tego quada.
Ale... Jeden quad do freestyle'u to mało, więc zdecydowałem się go sklonować.
W tym celu poskładałem takiego misiaczka:

I tak wygląda ze swoim starszym bratem:
Lata tak samo jak poprzednik, czyli fantastycznie
")
Idea jest teraz taka, że te quady mają takie same części (tylko kolorystyka jest różna), więc kiedy ubije na urlopie i jednego, i drugiego, to mogę poskładać z dwóch trupów jednego latającego
No i poza tym, kiedy się go włącza to gra "Take on me", więc jest zdecydowanie fabulous

ps. Smigła na różowym są tylko do fotek. W obu latam na TMotorach 5150, ale te Azury tak ślicznie pasują, że musiałem założyć do zdjęć ❤️
-
2
-
-
8 minut temu, robertus napisał:
A tego to najbardziej nie rozumiem, ale domyślam się, że to bierze się stąd, że Taranis jest polecany początkującym, "bo starcza na długo, no i ta nieograniczona możliwość konfigurowania wszystkiego"
E nie.
To dlatego, że kosztuje tyle co paczka płatków śniadaniowych, jest najbardziej przyjazny do FPV (a zdecydowana większość nowych adeptów chce się tym zajmować), a po roku zmienić tego nie trzeba.
-
Ok, ja już mam dwa lata nakulane na swoim Taranisie (który zastąpił mojego ukochanego Cockpita SX... Ech, jak to dobrze leżało w rękach...).
W tym czasie zrobiłem na Taranisie jakiś chore godziny (spokojnie ponad 1000h wylatane w dwa lata) i wnioski mam bardzo mieszane.
Po pierwsze - jakość wykonania jest bardzo meh. Dobrze, że chociaż pstryki są tanie...
Po drugie - wszelkie problemy zasięgowe, czy to na R9, czy na 2,4GHz to zawsze była moja wina. I tu nie ma odstępstwa, zawsze problemem była instalacja w modelu, uszkodzona antena etc. Zresztą - pod tym względem to FRSky nie różni się od innych systemów RC. Zawsze jak było zrzędzenie, na zakłócenia itp. to zawsze, nawet w czasach 35MHz, to błędy wynikały z instalacji w modelu.
Moja opinia jet taka, że powszechność narzekania na FRSky'a wynika z bajzlu firmware'owego (bo powiedzmy sobie szczerze - to jest bajzel) i popularności tych nadajników (szczególnie u początkujących)
Być może jakieś błędy w oprogramowaniu istnieją, ale najwyraźniej za mało latałem, żeby to znaleźć.
A jeśli chodzi o OpenTx...
Ech... Upierdliwe toto jest.
Tzn. Zaprogramować tu można wszystko i to jest to coś uwielbiam. W jednym swoim modelu mam nawet zaprogramowane sterowanie nie przepustnicą, a prądem jaki silnik pobiera. Tzn. z użyciem przełączników logicznych i telemetrii napisałem taki prosty skrypcik, który dba o to, żeby zależnie od położenia przepustnicy, stabilizować prąd jaki bierze silnik na zadanym poziomie (czyli nie steruję przepustnicą, a mocą pobieraną przez regla).
Gorzej, że jak przychodzi do jakiejś prostej rzeczy, pokroju zaprogramowania szybowca z czterema serwami w skrzydłach, to nagle robi się to cierpienie...
Każdy jeden mix trzeba zrobić ręcznie, dla każdego serwa osobno. A jeśli później stwierdzimy, że jednak nieco więcej klapy powinny się wychylać do dołu, to trzeba modyfikować każdy mix ręcznie... To jest niestety totalne obrzydlistwo...
I ja wiem, że zaraz ktoś powie, że mogę użyć zmiennej globalnej, tak aby ona sterowała wartością mixa, albo napisać skrypt LUA itp. itd. ale to tylko potwierdza, że kiedy ten nadajnik robi rzeczy których inne nadajniki nie mogą, to potrafi być upośledzoneyw totalnych podstawach.
I ja akurat śmiało mogę powiedzieć, że wykorzystuje maxa
. Po prostu dalej potrafi mnei to wkurzać
Za to ciekawym przykładem otwartego oprogramowania jest Betaflight.
Przy tym muszę całkowicie pochylić czoła, mogę powiedzieć tylko pozytywne rzeczy o nim. Tzn. łatwy w obsłudze, bardzo nowoczesny i wciąż dynamicznie się rozwijający.
-
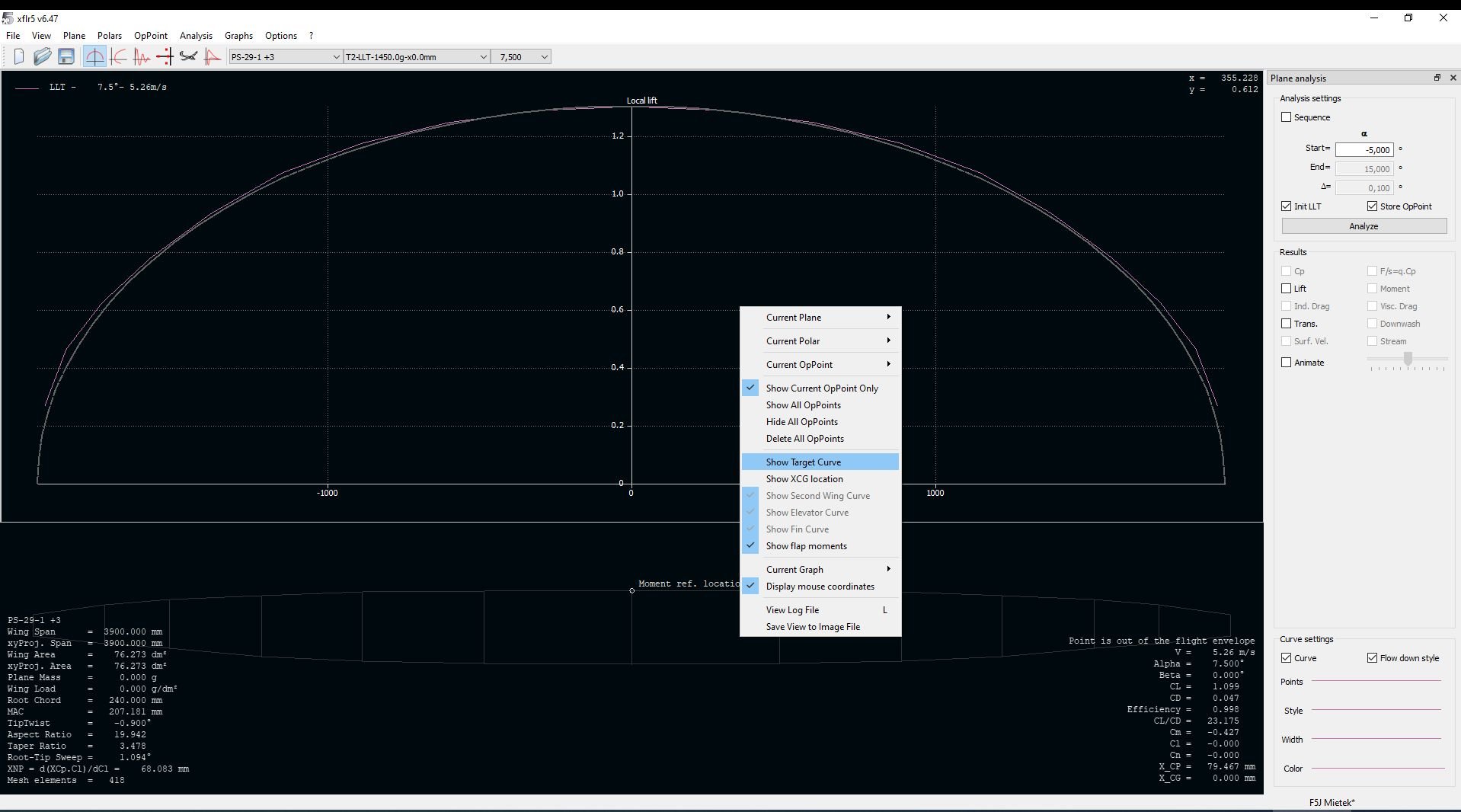
12 minut temu, czarobest napisał:
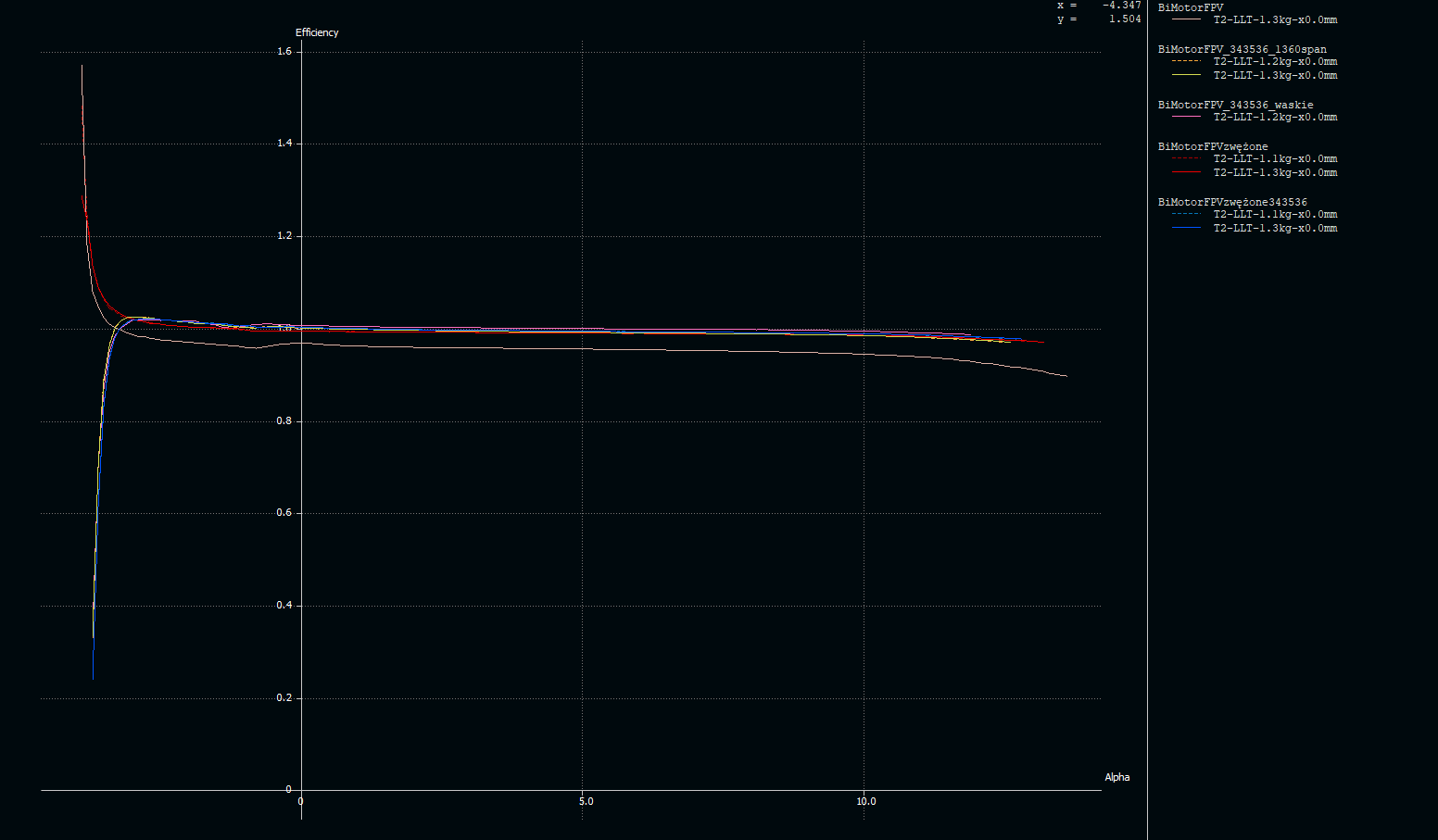
Bo jest mniej eliptyczny, choć co dobre nie ma "górek" na końcach, ale może źle to rozumiem
.
Wybaczcie jeśli Wasze oczy krwawią po tym co piszę i robię.
Wysłane przy użyciu Tapatalka
E daj spokój... Sensowne pytania zadajesz.
Ale do analizy eliptyczności rozkladu to używasz złego wykresu. Powinien być C*CL/MAC, a nie sam CL.
Sam CL pokazuje jedynie lokalny współczynnik siły nosnej. W tej wersji przydatne głównie do analizy przeciągnięcia, żeby zobaczyć gdzie się wykres najpierw załamuje.
-
Łoj, nie tak robi się profile przejściowe
Profile powinny płynnie przechodzić jeden w drugi nie skokowo
Tzn. Zrób jedynie 3 trapezy. U nasady AG 34, na pierwszym załamaniu AG 35 i AG36 na końcówce. Przejściowe profile są zrobione tak, aby przez całą rozpiętość zmieniały się płynnie.
-
-
11 godzin temu, Andrzej Klos napisał:
Tutaj jest artykul, o ktorym wspominalem:
wraz ze zwyczajowa grupka malontentow. Chociaz musze przyznac, ze Jurek na koniec zmienil troche zdanie ?.
Ech, pamiętam ten temat nawet chciałem tam napisać co o tym myślę, ale miałem wtedy ciekawsze zajęcia.
Bardzo lubię, że najwięcej do powiedzenia o sprawdzalności modeli numerycznych mają ci co nie wiedzą jak działają modele numeryczne
11 godzin temu, jarek_aviatik napisał:Powstaje super materiał pokazujący do czego jeszcze można wykorzystać XFLR5.
Czarek - taka mała dygresja - jeśli robisz analizę profili z płaskim spodem taki jak ten AG, to pamiętaj aby przed analizą zrobić de-rotate i normalize.
Kiedyś o tym zapomniałem i przy ustalaniu dekalażu w modelu rzeczywistym miałem co innego niż w XFLR.
O, true dat.
AG do drewna są dostarczane ze spodem ustawionym poziomo, to jest prawie 2st kąta natarcia. Osiągów samego skrzydła to nie zmieni, ale pamiętać o tym trzeba
12 godzin temu, czarobest napisał:Tutaj wyszedł całkiem (chyba
 ) ładny wykres dla skrzydła 1360mm z profilami AG34-35-36
) ładny wykres dla skrzydła 1360mm z profilami AG34-35-36
Zgadza się. Ładny przyrost oporu, bez spadku siły nośnej
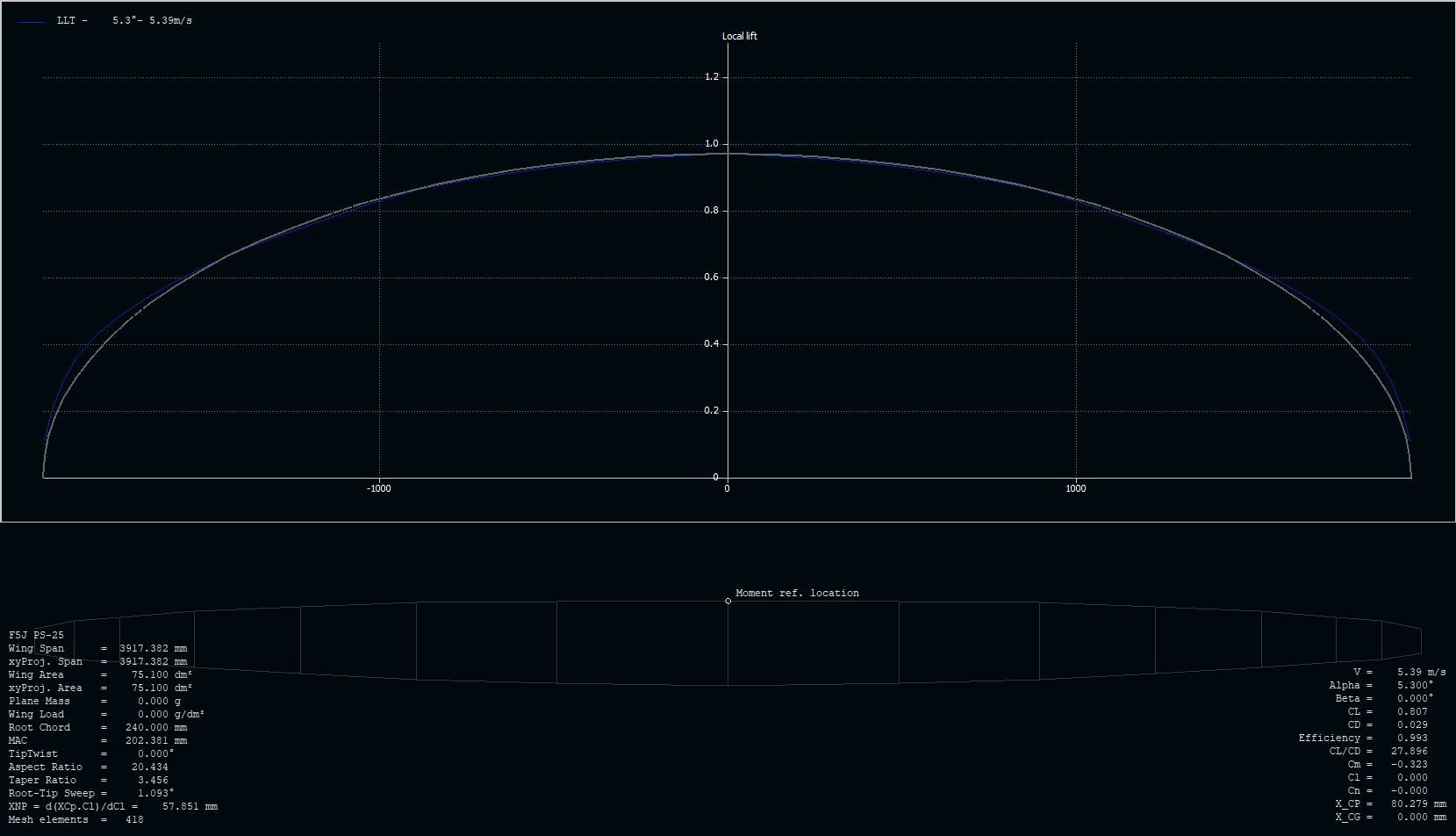
CytatFajnie też chyba widać różnicę tutaj:
To jest zwężony płat z profilem tylko AG34
A to ten sam, ale z profilami AG34-35-36
Najgorzej wyszło skrzydło prostokątne:
To już jest Twoja decyzja. Ta analiza to jedynie środek osiągnięcia celu, nie cel sam w sobie. Musisz sam zastanowić się co Ci bardziej odpowiada
CytatNo to całkiem fajnie
, mówiąc o w miarę długim locie miałem na myśli raczej 30-40 minut (to dla mnie byłoby bardzo fajnie) więc nawet jeśli ten wynik jest zawyżony o 3-4 razy to i tak dobrze .
Tak pamiętałem o serwach i całej elektronice która na pewno trochę weźmie, ale tutaj również przy takim wyniku jeśli czas miałby się skrócić o połowę to dla mnie ok.
Eee, celuj w godzinę, najlepiej dwie
Mój Twinstar służy do relaksu po długim letnim dniu latania quadem i szybowcem. Przychodzi już zachód, startuje, kładę się na leżaku i przez 1,5h bujam się nad lotniskiem patrząc jak słońce zachodzi, kolorki się zmieniają, później jak w oddali, w mieście zapalają się latarnie, a na koniec ląduje jak już jest solidnie po zachodzie. Rewelacja, polecam każdemu ❤️
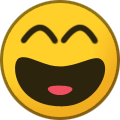
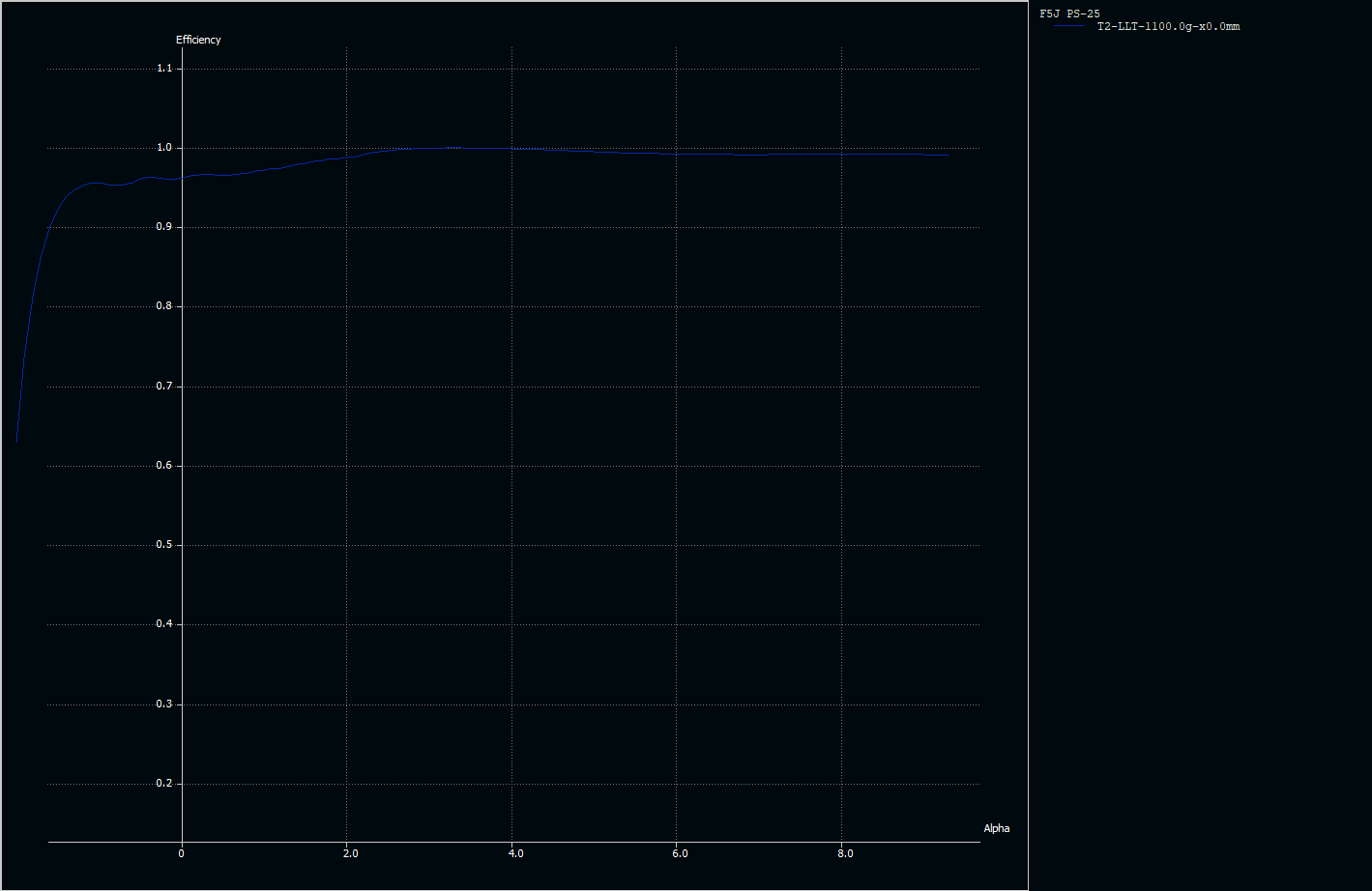
CytatZrobiłem sobie też wykres sprawności i wygląda tak:
Wygląda na to że prostokątne skrzydło odbiega dość od pozostałych wariacji. Dziwny wydaję mi się tylko ten wzrost sprawności na ujemnych kątach, a i to że część wykresów idzie ponad 1 co raczej jest niemożliwe
. Ale to tak jak powtarzałeś daję porównanie ich do siebie.
No dziwny, bo nie ma sensu
Ale świetnie, że mamy artefakt możemy znów się czegoś nauczyć.
XFLR5 dostarczany jest z plikiem Guidelines.
Jest to nic innego jak dokumentacja, która omawia jakie metody tak naprawdę stosuje program i jak się z nimi obchodzić.
Kiedy mamy taki głupi wynik, to udajemy się do naszego pliku:
https://engineering.purdue.edu/~aerodyn/AAE333/FALL10/HOMEWORKS/HW13/XFLR5_v6.01_Beta_Win32(2)/Release/Guidelines.pdf+Znajdujemy rozdział o parametrze Efficiency (str. 43) i patrzymy co mamy napisane:
CytatThe efficiency factor, also named Oswald's factor, should always be smaller than 1. It may happen however that this factor becomes greater than 1 for numerical reasons in LLT, VLM and 3D Panel calculations. .
Czyli - czasem z "powodów numerycznych" może wyjść wartość większa niż 1.
I co to znaczy, to zastanówmy się już ze wzorkiem:
e = (CL^2)/(Pi*AR*ICd)gdzie:
e - efficiency factor
CL - współczynnik siły nośnej
Pi - Liczba nazwana od angielskiego słowa "Pie". Opisuje stosunek obwodu okrągłych ciast do ich średnicy (stad nazwa)
AR - wydłużenie skrzydła
ICd - współczynnik oporu indukowanego
Aby ten ułamek osiągnął wartość większą niż 1, to góra ułamka musi wyjść większa niż dół. Pi i AR z definicji krzywdy nie zrobią, więc wywalmy je przed ułamek, mamy wtedy postać:
e = 1/(Pi*AR) * (CL^2/ICd).Rozpatrując CL^2/ICd zauważymy jedną rzecz. Oba współczynniki, kiedy siła nośna (a więc CL) dążyć będzie do zera, to same będą do niego dążyć. W efekcie otrzymujemy liczbę bliską zeru, dzieloną przez kolejną liczbę bliską zeru. (możemy powiedzieć, że obie wartości dążą do zera). Taki układ jest bardzo czuły na niewielkie zmiany w wartości mianownika (czyli niewielka jego zmiana powoduje bardzo duży wzrost/spadek wartości całego ułamka). Niestety - komputery obsługują liczby zmiennoprzecinkowe ze skończoną dokładnością (tzn. mówimy, ze zmienna zmiennoprzecinkowa ma rozdzielczość o określonej ilości bitów. Nie, tego mi się nie chce już tłumaczyć
). W efekcie może dojść do tego, że przybliżenie tej liczby spowoduje właśnie taką dziwną wartość. Kiedy mamy układ numeryczny w takim stanie, to nazywamy go układem niestabilnym (kiedy w ogóle nie da się użyć do prognozowania), bądź chaotycznie zdeterminowanym (to wtedy kiedy rozwiązanie znajduje się w pewnym zakresie opisywanym przez funkcję prawdopodobieństwa).
Co robimy z analizą numeryczną układu w takim stanie? Przestępujemy i idziemy dalej, to się nie nadaje do wyciągania wniosków. Błędny wynik się wtedy odrzuca i bierze pod uwagę tylko prawidłowe (czyli dla wyższych kątów natarcia).
To co zaś musisz wyciągnąć z tego przypadku, to to aby dziwne wyniki sprawdzać w guidelines. Tak, żeby się dowiedzieć z czego to może wynikać i jak sobie z tym poradzić
-
2
-
-
A nawet mnie to nie dziwi,
Tak dla przykładu jedna z bardziej lubianych przeze mnie moich konstrukcji, czyli Jantar Magic:
Rozkład wygląda dosyć podobnie jak dla Twojego przykładu. Tzn. Mniej siły nośnej u nasady, więcej na końcówce.
I tak wygląda porównanie oporu lepkości z oporem indukowanym:
Nawet na najwyższych kątach natarcia (dla najwyższego oporu indukowanego), to opór indukowany jest o połowę mniejszy jak profilowy.
A to duża konstrukcja już jest, co by nie mówić modele szybowców rzadko wchodzą na Cz większe niż 1.
No i na potwierdzenie:
Praktycznie w całym zakresie kątów natarcia sprawność oscyluje w okolicy 1.
I to jest model gdzie opór indukowany jest kluczowy. W modelu dwusilnikowca do FPV, to opór indukowany spokojnie można odpuścić na rzecz udźwigu, czy nawet latwiejszej budowy, aż tyle to nie zmieni.
-
Godzinę temu, czarobest napisał:
Pewnie Ty to wiesz ale wrzucam jak wygląda profil Clark Y, AG12 i skrzydło z AG34, AG35, AG36 tylko już nie 1200mm a 1360mm rozpiętości.
Wiem to bardzo mocno powiedziane
Spodziewam się raczej pewnych wyników
Godzinę temu, czarobest napisał:I teraz pytanie, czy jeśli wykres się "kończy" to oznacza że powyżej tej prędkości profil przestaję pracować? Patrząc na te wykresy to faktycznie Clark Y wypada słabiutko, ale AG12 nie ma wielkiej przewagi aż nie wchodzimy na wysokie prędkości - jeśli dobrze to rozumiem.
Wykres się kończy kiedy program nie jest w stanie dopasować analizy profilu o odpowiednich parametrach. Tzn. dzieje się tak wtedy gdy wykres profilu się urywa, nie masz analizy profilu na odpowiednie Re, nie masz zakresu kąta natarcia w analizie profili, bądź gdy faktycznie przy danym Re i kącie natarcia skrzydło nie może wyprodukować odpowiedniej siły nośnej (i wtedy masz przeciągnięcie.
Ogólnie jeśli wykres się gwałtownie załamuje i widać, że ucieka w dół, to sprawdzić trzeba charakterystykę przeciągnięcia, jeśli linia po prostu się kończy, to szukać trzeba czy z analizą profili wszystko jest ok. Warto też zagęszczać skok analizy dla wysokich zakresów kąta natarcia (puszczasz raz analizę normalnie, a później zmieniasz skok na np. 0.05 i zakres na 9 do 15st, czy coś w tym stylu)
Charakterystykę przeciągnięcia sprawdzasz zaś tak, że dla najniższej prędkości jaka wyjdzie z analizy Typu 2 (czyli tego co teraz, analiza dla stalej siły nośnej) i robisz dla tej prędkości analizę typu 1 (czyli dla stałej prędkości). Sprawdzasz jak wygląda kształt krzywej CL od CX (czyli współczynnik siły nośnej od współczynnika oporu). Jeśli jest gwałtowne załamanie, to skrzydło będzie brzydko przeciągać, jeśli CL nie spada tylko opór rośnie, to przeciągnięcie będzie łagodne
CytatA później zrobiłem trochę bałaganu
. Na wykresie jest skrzydło (o rozpiętości 1360mm) zwężone dość mocno praktycznie na końcówce do 70mm i jego wynik to porażka - ten różowy oczywiście.
Wykres biały to podstawowe skrzydło prostokątne na AG34
Żółty (pomarańczowy) to wydłużone skrzydło do 1360mm z profilami AG34-35-36, przerywana wersja to policzona z mniejszą wagą dla takiego samego obciążenia.
Czerwony to skrzydło trapezowe z profilem tylko AG34, przerywane tak jak wyżej.
Niebieski to trapezowe z profilami AG34-35-36, przerywane tak jak wyżej.
CytatZ ciekawych dla mnie rzeczy:
Skrzydło o większej rozpiętości z kilkoma profilami mimo, że ma powierzchnię dalej mniejszą od prostego to wynik wygląda sporo lepiej. Skrzydło zwężone z profilem tylko AG34 ma wykresy nieznacznie niższe niż takie samo z profilami AG34-35-36, chyba tutaj są za małe różnice w wielkościach aby to miało duży wpływ, ale nie znam się
.
Z grubsza tak. Sens zbieżnych skrzydeł wynika z tego, że skrzydło o rozkładzie siły nośnej opisywanym krzywą eliptyczną (czyli skrzydło o kształcie elipsy zakładając, że skrzydło w każdym punkcie wykazuje taki sam współczynnik siły nośnej) ma najmniejszy opór indukowany.
Jak bardzo opór indukowany jest zbliżony do minimalnego możliwego opisuje tzw. Oswald's Factor, przemianowany w ostatnich latach w XFLR5 na efficiency. Najwygodniej zestawia się to z kątem natarcia. Wtedy widać jak w różnych kątach natarcia zmienia się skrzydło pod tym względem (pro tip: ten parametr ma znaczenie tylko dla dużych kątów natarcia, dla małych dominuje opór profilowy, więc nie ma co się przejmować niedoskonałym rozkładem w szybkim locie)
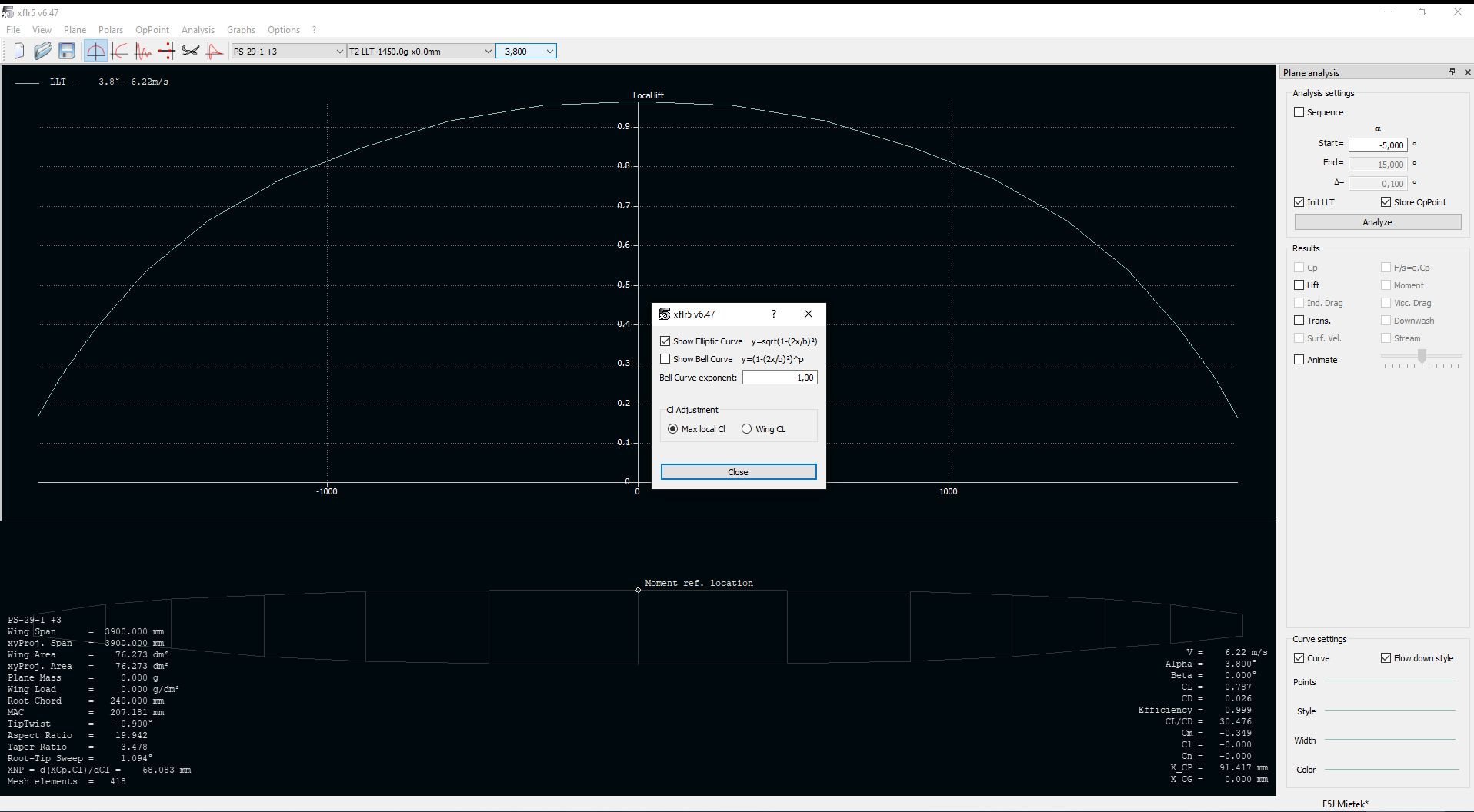
Rozkład zaś optymalizuje się w innym okienku, konkretnie rzecz biorąc tu:
Czyli wybierasz typ wykresu C.CL/MAC (czyli cięciwa*współczynnik siły nośnej / średnia cięciwa aerodynamiczna, jest to współczynnik siły nośnej znormalizowany, tak, że wagowo ma tym większą wartość im większa jest cięciwa w danym miejscu), na to prawy przycisk i klikasz co zaznaczyłem. Z racji współczynnika wagowego, to wartość tego wykresu spada ze spadkiem cięciwy oraz spada ze współczynnikiem siły nośnej.
Później zaznaczasz tak:
Pojawi nam się przerywana krzywa:
Ta przerywana krzywa, to właśnie krzywa eliptyczna (bell curve, z kolei stosuje się z kolei do latających skrzydeł). Kiedy rozkład pokryje się perfekcyjnie z przerywaną linią wtedy masz najmniejszy możliwy opór indukowany
A czy warto tak robić skrzydło?
Przede wszystkim - nie da się
Wymagałoby to zerowej cięciwy na końcówce (a to bardzo mała cięciwa, źle się wykonuje).
Ale do perfekcji też mierzyć nie warto. Schodzenie z cięciwami skutkuje zmniejszeniem liczby Re, a więc wzrostem oporu profilowego. Co zyska się na indukowanym, to straci gdzie indziej.
Oprócz cięciwą, to rozkładem sterować też można za pomocą kąta natarcia (czyli zwichrzeniem geometrycznym, skręcenie w dół, spowoduje bardziej ostry spadek krzywej) oraz profilem, który ma mniejszy przyrost współczynnika siły nośnej od kąta natarcia.
I to pokazuje drugi cel stosowania różnych profili po rozpiętości. Bo raz, ze pozwala to wziąć pod uwagę spadek liczby Re, to dodatkowo pozwala wstawić profil robiący mniej sily nośnej. Zachowamy wtedy kształt krzywej, a nie będziemy musieli tak ostro zejść z cięciwa (a więc z liczbą Re).
Sam poeksperymentuj co Ci lepiej wychodzi.
CytatZastanawia mnie jeszcze czy program tego nie liczy czy faktycznie nie ma to znaczenia? Chodzi o takie dwa skrzydła, o tych samych cięciwach i profilach ale nieco innym kształcie - wykresy dla nich są takie same:
Tak niewielka zmiana w skosie skrzydła bardzo niewiele wpływa na osiągi tego skrzydła. Przetestuj większy skos, to wtedy coś wyjdzie.
Ale - nawet taka zmiana powoduje zmiany w momencie pochylającym produkowanym przez skrzydło. W dużym skrócie - im skrzydło bardziej skoszone do tyłu, tym optymalny środek ciężkości wyjdzie bardziej z tylu.
CytatTo tak na razie z ciekawości, ale wychodzi coś dużo. Dla skrzydła żółtego największa sprawność wychodzi mniej więcej przy 14m/s i jest to 8W, 8W*4 = 32W, akumulator 5000mAh 12V to 60Wh co daję niby prawie 2h lotu? I zasięg na poziomie prawie 100km? Kosmiczne liczby, nawet domyślając się że to jest mocno niedokładne.
Dosyć rozsądnie to wychodzi. W LiIonach pakiet 5000mAh 12V (zawyżyłeś napięcie BTW - przyjmij bliżej 11V) to jest wtedy około 300g pakietu. Przy całości 1,2kg to daje 25% masy modelu w pakiecie (czyli dosyć sporo). Dla porównania mój Twinstar waży 1,6kg do lotu, z czego 600g to pakiet. 37,5% masy modelu zapewnia zasięg na poziomie 90km i czas lotu okołu 2h. A to dojechana życiem pianka, która nie stała obok aerodynamiki o niskich oporach.
Ale... Dwie rzeczy. Mój Twinstar ma dobrze dobrany napęd (a dobrze dobrany napęd pod kątem zasięgu to rzadki zwierz na modelarskich lotniskach), a drugą rzeczą jest, ze gdy schodzisz do tak małych prądów na silnik, to zabawę zaczyna psuć awionika. Tzn. serwa + FPV spokojnie potrafią wziąć paręnaście wat mocy. Nagle okaże się, że to stanowi sporą część wydatku energetycznego cąłości.
A tak poza tym?
Może który z naszych moderatorów zmieni nazwę tematu na bardziej ogólny? Trochę na około, ale z tego wyszło jak prosto policzyć sobie coś w XFLR5. A miałem o tym osobny art pisać. Kiedyś... A tak powstało coś wspólnymi siłami, ale teraz
-
Ależ ona są płaskie jak moja była łączka do lądowania.
Dla porównania zrób wykresy na czymś co nie jest AG, jakiś Clark Y, czy inny badziew sprzed 50 lat, to zobaczysz jak bardzo AG mają przewagę w zakresie prędkości.
Polecam Ci jeszcze wziąć pod uwagę bardziej żyletkowate profile pokroju AG40d, czy AG12. Pewnie nie będziesz ich chciał zastosować, bo to cienkie i wredne w wykonaniu, ale daje pewne pojęcie po co się bawić z profilami.
No i najfajniejsza zabawa. AG chodzą w związkach poliamorycznych i trochę im smutno kiedy są same. Zobacz tutaj:
http://charlesriverrc.org/articles/drela-airfoilshop/markdrela-ag-ht-airfoils.htmI spróbuj zastosować w skrzydle zestaw profili, a nie tylko jeden. Cieńsze idą na końcówkę, po to aby wziąć pod uwagę spadek liczby Re.
A jak masz już wykresy doskonałości, to możesz zacząć szacować zasięg, czy czas lotu. Tzn. bierzesz prędkość max doskonałości, sprawdzasz jaki jest pobór mocy i (znając zastosowany pakiet), liczysz czas lotu i z tego zasięg.
Jeśli chodzi o parametry do liczenia czasów/zasięgów, to proponuje nie kombinować. Przyjmij, że opór jest niedoszacowany dwukrotnie (więc pobór rośnie x2) i przyjmij sprawność napędu na poziomie 0,5. Czyli pobór mocy mnożysz przez 4.
ps. A chce mi się, bo trochę się muszę wyżyć po tygodniu w robocie...
ps. 2 Poza tym to kolejny kamyś do ogródka dla tych co uznają, że FPV jest prosto z pudełka.
-
1
-
-
No i pięknie mamy o czym gadać.
Przede wszystkim - wykresy wyglądają rozsądnie - mają sens, nie trafiłeś na żaden z moich ulubionych bugów.
Teraz pogadajmy o interpretacji.
Przede wszystkim - XFLR5 to model numeryczny, więc daje wyniki wyidealizowane.
Czyli masz nie tylko nieuwzględnione gondole silnika, ale też kadłub, stateczniki i kurz na skrzydle.
Przyjmujemy więc założenie, że jest to analiza porównawcza. Do Twoich celów można przyjąć, że rzeczy nieuwzględnione wpłyną jednakowo na oba skrzydła, więc modele z oboma hipotetycznymi skrzydłami będą się różnić tak jak różnią się od siebie same skrzydła.
Dla przykładu:
Dla 10m/s skrzydło prostokątne zżera koło 9W, a skrzydło z trapezowymi końcówkami zżera koło 11W.Zakładając, że wynik jest niedoszacowany (a jest) dwukrotnie, to jedno skrzydło zeżre 18W, a drugie 22W. Mimo, że sama wartość różnić, się będzie, to relacja zostanie zachowana.
Dlatego tu się pojawia to o czym często wspominam - konieczne jest posiadanie konstrukcji odniesienia, bez tego wyniki wiszą trochę w próżni. Oczywiście to wciąż pozwala optymalizować pod kątem jakiejś cechy, ale dopiero oblot pokaże jakie konkretne wartości udało się uzyskać. Do Twoich celów, spokojnie możesz przemnożyć wyniki x2 i będą z grubsza ok (zakładając 100% sprawności napędu, do tego jeszcze wrócimy).
Aczkolwiek - na pytanie z tematu możesz odpowiedzieć sobie jak najbardziej z tych wyników. Wrzuć jakiś inny profil do porównania i zobaczysz co wyjdzie.
Pomówmy teraz jeszcze o tym czym jest parametr mgVz.
Bierze on się z prostego założenia, że samolot żeby lecieć, to potrzebuje energii.
W locie szybowym zamienia energię potencjalną, na kinetyczną (czyli traci wysokość).
Innymi słowy praca oporu aerodynamicznego musi być równa utracie energii potencjalnej
Praca danej siły równa jest
W = F*SCzyli dla oporu aerodynamicznego i wyskości
Wx = mg * HCzyli - Wx - praca oporu aerodynamicznego
mg - masa x ciężar - siła ciążenia
H - strata wysokości (czyli dystans na jakim działała siła).
Różniczkując to obustronnie po czasie otrzymujemy coś takiego:
Px = mgVCzyli - Px - moc wydana na pokonanie oporu (energia zróżniczkowana po czasie daje nam moc, czyli wydatek energii)
- mg - parametry niezależne od czasu, więc traktowane jako stałe przy różniczkowaniu
- V - droga zróżniczkowana po czasie to po prostu prędkość opadania (bo prędkość to zwyczajnie wydatek drogi)
Jeśli ktoś jest ciekaw skąd taka droga różniczkowania, to niech piszę może wrzucę jakiś post o tym skąd się biorą podstawowe zależności w mechanice klasycznej.
To wyprowadzenie jest nam potrzebne aby pokazać skąd wzięła się w ogóle ta zależność i co wpływa na zapotrzebowanie na energię do utrzymania lotu.
Teraz zastanówmy się co w sumie zawiera nasz wzorek.
Mamy w nim:
m - masę konstrukcji
g - przyśpieszenie ziemskie
Vz - prędkość opadania.
g nas w ogóle nie interesuje, bo to jest wartość stała.
m jest o tyle ważne, że jest to masa naszego modelu, które jest współczynnikiem liniowym w tym równanku. Czyli - 2x cięższy model będzie potrzebował dwa razy więcej mocy do lotu z samego tego współczynnika.
Vz z kolei zależne od doskonałości aerodynamicznej i prędkości lotu (która zależy też od masy, więc masa jest dodatkowo uwikłana jeszcze, ale to już mniejsza, do tych rozważań to znaczenia nie ma).
Innymi słowy - z perspektywy obliczeń aerodynamicznych, to jedynie Vz ma cokolwiek wspólnego z aerodynamiką. Stąd jeśli porównywalibyśmy konstrukcję o tej samej masie to do stwierdzenia o tym ile któraś będzie dłużej latać, to wystarczyłby nam wykres prędkości opadania od prędkości lotu.
Ale dzięki temu wykresowi możemy również porównać jak zmienia się pobór mocy zależnie od dobalastowania konstrukcji. I dzięki temu wiemy też, czemu dwa razy większy akumulator nie gwarantuje dwukrotnie dłuższego czasu lotu.
A teraz co znaczy w praktyce ten wykres.
Masz na nim zależność poboru mocy (oś Y), od prędkości lotu (Vx).
Tak przedstawiony wykres, pozwala jak najbardziej już wypowiadać się o prędkości lotu. Tzn. Jeśli chcesz latać jak najdłużej, to model musi utrzymywać prędkość odpowiadającą najniższemu poborowi mocy. I w tym porównaniu widać, że skrzydło prostokątne pozwoli latać o włos dłużej (bo minimalny pobór mocy ma nieco mniejszy) niż skrzydło ze zbieżnymi końcówkami.
Widać jednak też, że im szybciej będziesz leciał, tym skrzydło zbieżne będzie miało większą przewagę, więc będziesz lepiej radził sobie z wiatrem.
Ale jak ktoś uważa, to zauważy pewien problem. Tzn. Skrzydło prostokątne ma mniejszy opór wynikający z lepkości (bo na końcówce będzie wyższa liczba Re), a skrzydło zbieżne powinno mieć mniejszy opór indukowany dla wyższych Cz, więc powinno lepiej się sprawować w locie powolnym, a wyszło zupełnie na odwrót.
Wynika to z tego, że skrzydło o zbieżnych końcówkach ma mniejszą powierzchnię, a więc większe obciążenie powierzchni nośnej (dla tej samej wagi). Większe obciążenie powierzchni nośnej powoduje, że cały wykres doskonałości od prędkości przesuwa się w stronę wyższej prędkości.
Żeby wyizolować samą aerodynamikę musimy zrobić inny typ analizy.
Tzn. tak dobrać masę dla obu skrzydeł, aby osiągnąć to samo obciążenie płata (bo wtedy, jest taka sama prędkość dla tego samego średniego współczynnika siły nośnej, więc liczba Re się będzie zgadzać) i wykonać wykres Cl^(3/2)/Cx od Vx.
Cl^(3/2)/Cx to aerodynamiczna funkcja energetyczna. Im osiąga ona większą wartość, tym mniejsze będzie opadania całości. A, że nie mamy tu uwikłanych żadnych parametrów związanych z masą, to możemy już mówić o tym jak różne skrzydła, wychodzą dla różnych prędkości lotu. Oczywiście masa wciąż wpływa na prędkość (a więc liczbę Re), więc jest jakoś tam uwikłana, ale właśnie po to dobraliśmy to samo obciążenie powierzchni.
I teraz pozostaje pytanie - która analiza jest tą właściwą?
Niestety - obie. Tzn. analiza samych parametrów aerodynamicznych jest bardzo przydatna do określenia tendencji danego zagadnienia. Koniec końców - jeśli nie projektujemy szybowca to warto wrócić do analizy z uwzględnieniem masy.
No i jeszcze jedna ważna rzecz. Tzn. nie jestem pewien czy naprawdę chcesz optymalizować model jedynie pod kątem czasu lotu. W ten sposób możesz spłodzić coś co będzie wisieć na niebie jak moja Prząśniczka:
Bo długo to to lata, problem jednak taki, że nigdzie nie zaleci.
Żeby zoptymalizować zasięg to musisz zając się doskonałością aerodynamiczną. Tzn. Zestawiasz Cl/Cd z Vx. Im większy parametr Cl/Cd, tym model dalej zaleci na danym akumulatorze.
I to też nie wszystko, bo duża doskonałość nic nie znaczy jeśli będzie mała prędkośc lotu, bo minimalny wiatr czołowy spowoduje, ze doskonałość stopnieje momentalnie.
Innymi słowy - zadbaj o to, żeby żarlo mało energii, miało sporą doskonałośc oraz, aby wykres Cl/Cd(Vx) miał jak najbardziej płaską charakterystykę.
No i posprawdzaj inne profile, może odkryjesz coś ciekawego.
Powodzonka
-
3
-
-
Nikt się z wiedzą o czymkolwiek jeszcze nie urodził
Zrób tak. Wejdź na moją pisaninę:
I zrób po kolej te czynności:
1. Zainstaluj XFLR52. Wczytaj w niego AG 34
3. Wykonaj dla niego Batch Analysis
4. Wykonaj skrzydło
5. Policz analizę dla stałej siły nośnej (Type 2) odpowiedniej wagi
7. Wejdź na otrzymane wykresy, wciśnij 1, żeby pierwszy rozszerzyć na cały ekran, a później V i wybierz zależność mgvz (dla Y) od Vx (dla X).
8. Będziesz miał wykres poboru mocy zależnie od prędkości lotu.
Z tym moim podręcznikiem ogarniesz to w godzinkę, a jak to zrobisz to wrzuć wykres i pogadamy jak to analizować.
Bo wiesz - mógłbym to zrobić. Ale musiałbym zrobić przerwę w lutowaniu quada, a chyba mi się nie chce
-
1
-
-
Płaski spód, płaskim spodem. Istotne jest to, że ten profil jest kanciasty. Zobacz jak został użyty np. w tym modelu:
http://charlesriverrc.org/articles/bubbledancer/markdrela-bubbledancer-3m.htmSzczególnie na ten rysunek zobacz:
http://charlesriverrc.org/articles/bubbledancer/PDFs/wing_plan_V2b.pdfListewki są tam gdzie są, bo wtedy nie zapada się poszycie na płacie.
Ogólnie AG do drewniaków są cudowne <3.
Jeśli chodzi o latanie dlugo, to pies trącał LiPole
Obecnie LiPole stosuje jedynie w quadach i helikach, wszelkie samoloty latają mi na LiIonach.
Wynika to z tego, ze cellki są śmiesznie tanie, bardzo żywotne i mają świetny stosunek przenoszonej energii do masy.
Istotny jest jedynie prawidłowy dobór ogniw i ich solidne polutowanie (bądź zgrzanie, ale punktowe zgrzewy i 60A poboru jakoś mnie nie przekonuje).
Zasadniczo obecnie na rynku są dwa fajne typy ogniw w rozsądnych cenach.
Do wysokich prądów stosuje te:
https://allegro.pl/oferta/ogniwo-sony-18650-vtc5a-30a-us18650vtc5a-2600mah-8840711136?snapshot=MjAyMC0wMi0wNlQxMjoyNzo1NS4yOTBaO2J1eWVyOzcyZTAzMDFlZDJiNTY5ZWEyZTM5OWQ4M2JlZjNjYzkwOTRmNTdjYjBiNTRhMjRkODVkMjEyYzdlMzMzZjc0YmI%3DStosuje je wtedy kiedy oczekuje minimalnego czasu lotu poniżej 30min. Dlatego wożą się w Funjecie FPV (jako 4s2p), skrzydełku itp. Pamiętaj tylko, że przy ciągłym rozładowaniu 30A na cellkę dobijają solidnych temperatur. Nie jak kadmy w dawnych latach, ale jednak koszulki potrafią mięknąć bez przewiewu. Cellki te ładuje prądem 4C, często bez balansowania, bo zwyczajnie się nie rozjeżdżają.
Kiedy zaś oczekuje minimalnego czasu lotu powyżej 30min to idę w te cellki (czyli np. w Twinstarze mi się wożą):
https://allegro.pl/oferta/ogniwo-li-ion-sanyo-ncr18650ga-3-6v-3500mah-10a-8120280175
Niestety dłużej się ładują (nawet jak wrzucę na 4C to faza stałonapięciowa zaczyna się szybciej i prąd im spada) i musisz wziąć poprawkę na niższe napięcie pod obciążeniem i niższe napięcie odcięcia. Ale jak o to zadbasz to odwdzięczają się kosmiczną ilością prądu na gram wagi.
I zawsze idę w cellki z rozpakietowania, sporo złotówek zostaje, a sprawują się dobrze.
Łączenie robisz tak, że cellki najpierw łączysz równolegle (czyli robisz np. 3 pakiety 1s2p) i dopiero później łączysz w szereg (czyli tamte pakiety lutujesz w 3s2p). I nie chodzi mi tu o kolejność lutowania, chodzi o kolejność łączenia. Kiedyś lutowałem do tego wtyki od balancera, teraz mi się już nie chce. Profilaktycznie co 50 cykli pomierzę czy się nie rozjechały napięcia i nawet najstarsze aku (sporo ponad 300 cykli) mają różnice zawierające się w setnych wolta.
Ogólnie LiIony są wspaniałe do długich lotów.
Jeśli chodzi o kształt skrzydła.
Chcesz żebym Ci to sprawdził, czy może chcesz żebym Ci opisał jak użyć do tego XFLR5 i sam nauczysz się to robić (ale wtedy chciałbym żebyś przedstawił wyniki na forum, przyda się to też komuś innemu)?
-
3
-
-
Tu masz trochę inny materiał, ale korzystam do tego samego celu:
http://mikroguma.pl/categories/view/128
Poliuretan jest tyle fajny, że nieco się mniej brudzi, ale jest trudniej dostępny w małych grubościach
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
W dniu 21.02.2020 o 01:21, Kamyczek_RC napisał:Ech Kamyś, Kamyś...
Taka cienka (...) z Ciebie a się za modelarza uważa...
Sam modelu F3F nie zrobisz, modelu nie policzysz, wzorników niewyfrezujesz.
Tylko zestaw złożyć, oblatać...
I takie nic się modelarzem będzie zwało...
Gdzie Ci do prawdziwych modelarzy co swoje modele liczą i formy frezują.
PS. Oczywiście, że to ironia. Jeśli ktoś uważa, że zajmuje się modelarzem, to dla mnie modelarzem jest i z radością powitam go na lotnisku.
-
4
-
1
-
Do Twoich parametrów zacząłbym od AG34.
Gruby, świetne osiągi, odporny na przeciągnięcie i banalny w budowie (jest przystosowany pod skrzydło konstrukcyjne)
-
Nie wiem jak z bliska, ale z Nysy to widać.
I to tak widać, że z teleskopem muszę do Czech jeździć, inaczej cała północna część nieba jest czerwona.☹️






 .
. .
.


Jaskółka FPV (nie ta jaskółka)
w Platforma - nasze konstrukcje
Opublikowano
Czołgiem Panowie")
Ostatnio szedłem sobie z plecakiem (na który wisiały quady) w takich okolicznościach:

I myślałem, ze teraz tam leży śnieg, to quady są ok. Ale kiedyś będzie tam ciepło i będę mógł sobie posiedzieć na kamieniu i zrelaksować pojawił się, więc pomysł zrobienia platformy FPV, wyposażonej w GPS, pełny FC z OSD i autopilotem, systemem wizyjnym na 1,2GHz, prędkością przelotową ponad 65km/h i czasem lotu ponad godzinę.
Brzmi póki co mało interesująco, ale jest w tym jeden haczyk. Chce się upchać w wadze poniżej 250g
W tym celu dobrałem najlżejsze sensowne wyposażenie, czyli:
-FC - Matek F411 WSE (rozwiązuje wszystkie problemy małych FC)
-Kamera - Caddx Ratel (jakby to było kiedykolwiek pytanie)
-GPS - Beitan BN-180 (bo mały, a 220tka jest świetna)
-ESC - dowolny toothpickowy, zobaczymy co się nawinie
-VTX - Matek VTX 1G3 (bo 1,2GHz jest świetne do bujania się po krzakach)
-silniki - Brotherhobby 1103 8000kV (zostały po starym toothpicku)
-aku - SAMSUNG INR18650-35E 3500mAh zlutowane w 2s
-Serwa - jeszcze nie wiem
Rx - R9MM (bo mały, jednoantenowy i żadne krzaki mu niestraszne)
Posiedziałem trochę przy XFLR5, później trochę posiedziałem w Rhino i powstał projekt:

Całość później przerzuciłem na deski balsy (załączam zipa z DXFami do postu. Jak ktoś by takiego chciał to sobie też zrobi) i wyciąłem sobie na frezarce zestawik")
Najpierw wyglądał tak:
Dociekliwi zobaczą, że dużo tu węgla. Nie wynika to z tego, że planuje jakieś potężne przeciążenia. Po prostu całość ma cieniutki profil (AG38) i użycie handlowych płaskowników węglowych było najprostszą opcją na wykonania dźwigara i krawędzi spływu.
A dziś wygląda już tak:

Oklejony, a całkowicie pozbawiony elektroniki waży jedynie 60g. Stawia mnie to grubo poniżej zakładanej wagi.
Tzn całość powinno wyjść koło 210g. To znaczy, że prawie 50% masy startowej to będzie pakiet. Jeśli te małe śmigiełka nie okażą się jakoś obrzydliwie niesprawne, to można liczyć na czas lotu blisko 2h.
Czyli już nastawiam się na oglądanie zachodów słońca w górach i schodzenie ze szlaku po ciemku ❤️ .
A i dlaczego jaskółka?
Bo całość jest mała, szybka i z małym wydłużeniem płata. Jak jaskółka")
microFPV.zip