Patryk Sokol
-
Postów
3 595 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
102
Treść opublikowana przez Patryk Sokol
-

Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Po pandemii ? -
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Nie po to jest ten miks. Jeśli masz model ze wzniosem, to w prawidłowo skoordynowanym zakręcie, dla małego wychylenia lotek, kąt natarcia zewnętrznego do zakrętu skrzydła rośnie, a wewnętrznego maleje. Wychylenie klapy zmiksowane do lotek pozwala poprawić warunki pracy skrzydła w takich warunkach (opuszczenie klapy skutkuje lepszą pracą skrzydła dla wyższych kątów natarcia i vice versa). Dopiero od większego wychylenia lotek klapy mają zwiększać reakcję modelu na drążek, ale jak ktoś stosuje tak duże wychylenia, to w tej chwili raczej nie myśli oporach. Kolejną kwestią jest też to, że powyżej pewnego wychylenia przyrost oporu zaczyna być znacznie większy niż przyrost siły nośnej (szczególnie na zewnętrznym skrzydle, dlatego stosujemy rożnicowość), wtedy przerzucenie części odpowiedzialności na klapy się opłaca. Podsumowując - nie masz racji Poza tym - Ty serio uważasz, że tego nie sprawdzałem? Prosto powiadasz? To powiedz w jaki sposób. Ale od razu ostrzegam - jeśli polega to na wyizolowaniu samego momentu przechylającego i policzeniu jedynie przyrostu siły od przyrostu oporu, to wiedz, że nie tędy droga. Do tego modelu musiałby nie posiadać wzniosu, mieć symetryczny profil i znajdować się w warunkach zerowej siły nośnej. W sumia to dobre warunki do wyliczania stateczników do bomb, które przed eksplozją wkręcają się w grunt. Tam nam zależy na największej prędkości postępowej i największej prędkości obrotowej. Technicznie rzecz biorąc masz rację. Sam w Quantumie mam trochę bardziej złożonego miksa (bo u mnie miks lotek do klap i do steru kierunku jest zależny od ustawionych klap. W dużym skrócie - im klapy bardziej do dołu tym oba miksy większe) Problem polega na tym, że wchodzimy tutaj już na terytoria gustu, upodobań i stylu latania. Dorzuć do tego, że większośc użytkowników modeli nie ustawia nawet tak prostego miksa, a co dopiero bardziej złożonego. I później model zostaje z ledwo ustawioną różnicowością, bo "o co Ci chodzi, przecież lata" Dlatego zawsze podaje w miarę możliwości liniowe miksy. Jak ktoś to ustawi to już będzie bardzo dobrze, a jak będzie chciał lepiej, to już sobie dogra zależnie od swoich potrzeb. -
A może znasz jakieś projekty z systemami GOTO opartymi o Arduino? To wygląda jak dobra metoda na poświęcenie setki, czy dwóch godzin z życia
-
Na razie, to jeszcze nie ma co w montażu dołączać, póki co ma to prymitywną zegarówkę Nie wiem czy tan montaż doczeka goto, upgrade'y do GOTO są tak niewiele tańsze od EQ-5 z GOTO, że raczej w tę stronę będę szedł. Aczkolwiek - to raczej nie w tym roku, na razie nauka, bo sprzętu nakupić łatwo, a jestem przekonany, że już na tym co mam zrobię coś fajnego.
-
Co do ISO - jak edytowałem, mój błąd A co astrometrii. ASTAP jest w stanie ogarnąć położenie offline z pojedynczej klatki którą naświetlam. W efekcie szukanie obiektów powinno być proste Wizualnie często te mgiełki trudno dostrzec, a robienie klatki i zastanawianie się w którą stronę przesunąć trwa długo. A tak to tylko wrzucę klatkę w ASTAPa, sprawdzę współrzędne i przejadę gdzie trzeba ❤️ Online też to nawet działa: http://nova.astrometry.net/user_images/3936123#annotated
-
Ok, wszystko fajnie by działało, nawet plate solving jestem w stanie swoim sprzętem ogarnąć, ale nie jestem w stanie wymusić większego ISO niż 6400. Masz pomysł w czym rzecz? EDIT: Uznaj, że tego nie widziałeś, a ja muszę iść spać. Z jakiegoś powodu próbowałem ustawić ISO na 16 000, nie na 1 600...
-
Ok, więc tak. Podpiąłem do stacjonarnego Canona po USB - cisza, nawet urządzenia nie widzi. Myślałem, że lipa, bo nie mogłem przez USB nawet fotek zgrać, ale coś mnei tknęło i podpiąłem do jednego z moich laptopów. I okazuje się, ze działa, NINA widzi aparat od razu po podpięciu, na Win10 nawet sterowników nie potrzebowałem. Nawet udało mi się zrobić fotkę zwalniając migawkę z komputera. Jeśli teraz się okaże, ze mogę serię fotek zlecić laptopowi i zapomnieć o temacie to rewelacja ❤️ Z aplikacją na komórkę musiałem ciągle trzymać dotknięty wciśnięty przycisk migawki na ekranie (nawet na zdjęciach seryjnych). Liczę, że dzięki temu będę mógł puścić serię, a samemu zająć się radosnym patrzeniem przez okular.
-
E, nie Jakbym składał zdjęcia w GIMPIe to w pierwszej tercji bym oszalał, a w drugiej tercji umarł Stackuje w Deep Sky Stackerze, później tylko korekcję barw robię w GIMPie. Samo zdjęcie po stackowaniu prezentuje się tak, że nawet go nie pokazuje. Chyba, że zdjęcie już po stackowaniu powinno być ok? Bo bez spłaszczenia zakresu, to nawet nie widać nic poza kilkoma najjaśniejszymi gwiazdami. Używam oczywiście formatu RAW, nawet nie wiem jak wygląda JPG wygenerowany przez ten aparat I tak, robię zdjęcia na kartę SD i później zgrywam. Jeśli chodzi o sterowanie tym aparatem to temat raczej do zapomnienia, nawet zewnętrznej migawki nie obsługuje. Szczęśliwie da się kontrolować przez komórkę i z tego tutaj korzystam. Na Pixinsighta się nieco czaję, ale to nie teraz. Tzn. wezmę sobie okres próbny kiedy będę już miał więcej zdjęć do zabawy. A jeśli chodzi o ASTAPa - nie znam, nie słyszałem, właśnie zaciągnałem i na próbe stackuje pliki z których powstało powyższe zdjęcie. Niemniej - ISO do zmiany w takim razie. W pierwszą pogodną noc spróbuje coś sfocić sprzed bloku (bo M81 i M82 są przez całą noc widoczne z placu koło mojego domu).
-
Zgodnie z zapowiedzią - połapałem fotony uciekające z galaktyk M81 i M82. Po posiedzeniu w GIMPie wygląda to tak: Postęp względem Andromedy jest znaczący, poczynając od lepszego ustawienia montażu, przez większą ilość złapanego światła, po wykonane w końcu klatki kalibracyjne (wcześniej miałem tylko czarne klatki, teraz doszły klatki jednokolorowe). Niemniej - wciąż wydaje mi się, że warto by zebrać jeszcze więcej światła. I teraz drogi mam dwie: 1. Zrobić kolejne 1,5h naświetlania na obecnych ustawieniach (ISO800, 30s przesłona, założony filtr neodymowy (Baader Moon&Skyglow)) i dorzucić do piątkowej serii 2. Olać poprzednie klatki i przetestowąć wyższe ISO (bo podobnież przy takich zabawach wyższe ISO skutkuje niższym poziomem szumu). Wieśku, jak myślisz? W którą stronę pójść?

-
Pod obciążeniem to 2,5V dla Li-Ion krzywdy im nie zrobi (szczególnie tych niskoprądowych, VTC5a to już są wtedy dętką totalną). Wiem, bo sam tak używam i to już ze trzy sezony. Kiedy ma się OSD, to cut-off jest naprawdę zbędny, bo cut-off służy żeby nas powiadomić, że trzeba lądować, a OSD powiadamia nas znacznie lepiej. Jeśli chodzi o cut-offa to ustawiając cut-off dla Ni-MH nie osiągałem dobrych wyników. Tzn. dla 2s to nawet z grubsza działało, dla 3s cut-off potrafił być wcześniej. Moim rozwiązaniem stało się przejście na regle BLHeli-32. Tam można po prostu wyłączyć cut-offa i problem z głowy. Niemniej - przestaw na Ni-MH i sprawdź jak będzie odcinać latając blisko siebie. Jedyne na co wpływa to ustawienie, to właśnie na napięcie cut-offa, nic innego się nie zmieni.
-
Co do kosztów to chciałbym przypomnieć o jednej rzeczy - optyka jest na lata. A modele robią łup i po sprzęcie Bez problemu. Nie jest to cięższe przecież od obecnej tuby.
-
Generalnie potwierdzasz moje wnioski Na razie w takim razie zostanę przy w miarę krótkich ogniskowych. Czyli następny upgrade to pewnie będzie Sky-Watcher BKED 80 z korektorem pola
-
Z jakiegoś powodu totalnei nie pomyślałem o kwestii rozmiaru sensora. Tzn. jakoś założyłem, że masz DSLRa i tyle Ale tak symulację pola widzenia znam, swojego Canona wrzuciłem w Stellarium i długie godziny zastanawiałem się czy brać 120/600, czy 120/1000. Twój Ritchey-Criten wygląda nad wyraz interesująco, a nie jest jakoś znacznie droższy niż uczciwy apochromat. Tyle,ze tej ogniskowej się boję. Tzn. wiem, że jak zostanę w okolicach 600mm ogniskowej, to przy moim DSLRu długo jeszcze mogę używać tego montażu którego mam. Czy przy 1500mm idzie jeszcze focić bez guidingu, czy guiding to już mus? Niemniej - Dream Focuser wygląda super. Ale to w kolejce po lepszej tubie optycznej Cały ten zautomatyzowany setup z kolei, to chyba nie dla mnie Bardzo często moje obserwację polegają na zostaniu na polu po lataniu modelami
-
Piękne ❤️ Pochwal się jakiego sprzętu używasz. Ciekaw jestem na jakiej ogniskowej robiłeś te zdjęcia Ten teleskop wpada w tę pułapkę o której mówiłem. Tzn. dołączone do niego okulary nadają się do bardzo niewielu rzeczy, do których patrzenie nie należy Więc kupując go warto od razu podmienić okulary na coś sensowniejszej klasy, a podobnej ogniskowej.
-
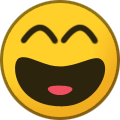
O też bardzo ładna fota. Planuję fotkę tego typu z panoramą Warszawy, ale nie wiem kiedy się za to wezmę. Albo atmosfera psuła zabawę Tego ciężko często uniknąć . Do 1000zł to wręcz ciężko jakiś teleskop polecić. Problem polega na tym, że nawet jak wydasz tyle na teleskop, to dołączone do niego akcesoria będą tak nędznej jakości, że drugie tyle wydasz na okulary, czy filtry. Przy takim budżecie, to zawsze polecam lornetkę do astronomii: https://deltaoptical.pl/lornetka-delta-optical-starlight-15x70-2?from=listing Do tego statywik: https://deltaoptical.pl/statyw-velbon-ex-mini?from=listing&q=statyw I przejściówka: https://deltaoptical.pl/adapter-statywowy-delta-optical-1-4-quot-dachowe?from=listing&q=statyw I za taki zestaw nie dość, że zapłacisz mniej, to będziesz wielokrotnie bardziej zadowolony, niż z taniego teleskopu. Przez taką lornetkę księżyc wygląda fenomenalnie, widać księżyce Jowisza, widać, że Saturn okrągły nie jest i sporo obiektów mgławicowych da się dostrzec. A co do moich ekspermynetów. Myślę, że zamknąłem temat obrbki fotografii mgławicy Andromedy: Więcej z tych serii zdjęć raczej nie wyciągnę. Dalsze wycinanie smogu świetlnego kończy się wycinaniem samej galaktyki. Niemniej - na pierwszą próbę jestem zadowolony. Moim następnym celem najpewniej będą galaktyki M81 i M82. Jest to para galaktyk w gwiazdozbiorze Wielkiej Niedźwiedzicy, które są całkiem spore, a jednocześnie blisko siebie na niebie. Jeśli wszystko pójdzie dobrze, to uda mi się je obie chwycić w jeden kadr Pierwsza próba w piątek
-
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Opisz coś więcej Jestem ciekaw Twojej opinii o prowadzeniuctrgo wynalazku. -
O właśnie takich wyborów się spodziewałem Do planet musisz zwrócić uwagę na ogniskową. Tzn. Fotografując w ognisku głównym "powiększenie" (bo nie do końca się to powiększeniem powinno nazywać. Lepszym określeniem jest kąt widzenia) zależy jedynie od ogniskowej obiektywu (czyli teleskopu). Tak dla przykładu pokażę Ci moje próby fotografowania Saturna i Jowisza w ognisku głównym mojego Newtona (1250mm ogniskowej). Wybacz niską ostrość, ale spróbuj ostrzyć tym bojlerem, kiedy Jowisz i Saturn uciekają co chwilę z pola widzenia (brak śledzenia daje się we znaki). Z racji tego, ze mój Newton nie jest przystosowany do fotografii, to jedyna metoda, żeby dało się wyostrzyć obraz to zastosowanie soczewki Barlowa 2x (swoją drogą - Barlow nadajacy się do fotografii kosztuje tyle co mały teleskop, te tańsze mają aberację chromatyczną). W efekcie masz obraz jaki byś miał z teleskopu o ogniskowej 2500mm. Mimo tak wielkiej ogniskowej, to te planety mają 15 pikseli na krzyż... Jak to obejść? Nie mam pojęcia. Poszukaj może o projekcji okularowej, to wygląda jak opcja na uzyskanie dużego powiększenia do planet, ale nie mam pojęcia jak to wychodzi (do DSów to mało istotne) Niemniej - sugeruję Ci tylko, że jeśli marzysz o planetach to zrób porządny research przed zakupem, żebyś miał kupę radochy z nowego sprzętu, a nie zawód Tak na szybko to znalazłem Ci takie rzeczy: https://www.astropix.com/html/i_astrop/Planetary_Imaging.html https://skyandtelescope.org/astronomy-resources/planetary-imaging-with-your-dslr-camera/ Zdają się niestety potwierdzać co mówiłem o ogniskowej i aperturze. W piątek ma być pogoda, to spróbuje wyciągnąć coś ze swojego sprzętu na Jowiszu i Saturnie. Jak zastosuje soczewkę Barlowa, to będziesz miał symulację tego teleskopu na który zbierasz A pewnie, że rzucę okiem na Księżyc (lata rzucania DLG pomagają w takich rzutach). Ale obecnie to księżyc w złej fazie do czegokolwiek Ale może jak będzie pełnia, to jakichś nazistów jeżdżących na dinozaurach zobaczę
-
Planety zdają się być właśnie upierdliwe. Tzn. niby są jasne i w ogóle, ale wymagają dużego powiększenia. Duże powiększenie wymaga dużej ogniskowej, a to z kolei wymaga dużej apertury, żeby zachować zdolność rozdzielczą. W efekcie, żeby zrobić naprawdę fajne fotki to ląduje się z jakimiś wielkimi Schmidtami-Cassegrainami Do deep sky'ów aż takiego sprzętu nie trzeba, bo może i są ciemne, ale zajmują sporo miejsca na niebie.
-
Ba, może kiedyś opiszę temat szermierki historycznej A fotki wrzucać będę Myślisz o czymś konkretnym? Chcesz robić planety, czy deep sky'e?
-
Czołgiem Panowie Tak sobie pomyślałem, że pokażę w co się ostatnio bawię. Otóż ci co mnie znają, to wiedzą, że lubię się bawić w astronomię. Z tego powodu ładnych kilka lat używam takiego bojlera: Jest toto GSO 10", czyli już naprawdę solidny kawał sprzętu. Teleskop taki pozwala zobaczyć już naprawdę dużo. Czerwona plama na Jowiszu, czy przerwa Cassiniego w Saturnie jak najbardziej stoją otworem. No i ciekawy jest księżyc. Bez stosowania filtra, to patrzenia na księżyc w pełni przypomina spawanie bez maski Problem polega na tym, że mimo solidnej już apertury, to obiekty głębokiego nieba zobaczyć trudno. I nie pomógłby tu i teleskop 3x większy, po prostu zanieczyszczenie światłem koło Warszawy, czy Nysy (które, o dziwo, nie jest specjalnie mniejsze niż w stolicy) powoduje, ze tym obiektom brakuje kontrastu (jeśli niebo jest jaśniejsze od obiektu, to zobaczyć się go po prostu nie da). Stąd stwierdziłem, że zajmę się dziedziną, którą chciałem się zając już od dawna, czyli astrofotografią. W tym celu zacząłem od zakupu Canona EOSa 4000D. Czyli absolutnie najtańszej lustrzanki, jaka istnieje na rynku pierwotnym. Zestaw z obiektywem, torbą i kartą pamięci kosztował zaledwie 1500zł (ba, nawet statyw dali gratis). I o ile zdjęcia robi naprawdę spoko, to ten sprzęt jest okrojony z dużej ilości funkcji. Ale mi dosłownie wystarczy. No i jest całkowicie wykonany z tworzywa, dzięki czemu jest lekki, a to znaczenie okazuje się mieć. Zrobiłem kilka prób fotografowania na kitowym obiektywie, ale wyniki wyszły mało insteresująco. Do tego zakupiłem jeszcze taki sprzęcik: I to jest Sky-Watcher Synta R-120/600. Czyli budżetowy, zadziwiająco światłosilny (f/5) achromat. I o dziwo jest to całkiem przyjemny teleskopik. Tzn. bałem się, że achromatyczny refraktor z taką światłosiłą, będzie miał aberację chromatyczną z kosmosu. W praktyce aberacja faktycznie jest (np. Jowisz ma fioletową obwódkę), ale nie jest to tragiczne. Poza tym obrazy są naprawdę przyjemnie. Teleskop zaś jest wykonany poprawnie, Wyciąg okularowy mógłby być lepszy, ale poza tym jest ok. Zaś dołączone do teleskopu akcesoria to jakiś żart. Nawet nie zhańbię żadnego swojego sprzętu tym złomem. Jedyny otwór w jaki włożę te akcesoria, to otwór w śmietniku, żadnego wyciągu nawet nie zobaczą. Ten teleskop to pierwszy co będzie to poprawki. Uznaję go za mocno przejściowego, później będę go wymieniał na jakiegoś apochromata (czyli refraktor ze skompensowaną aberracją chromatyczną). Ale to pewnie poczeka jakiś czas. Na początek zabawy jest jak najbardziej ok. Tzn. krótka ogniskowa powoduje, że powiększenie wychodzi odpowiednie do większości obiektów z katalogu Messiera akurat na jedną klatkę. Ale - ten teleskop ma jeden plus którego się nie spodziewałem. Kiedy rozstawiam swojego Newtona, to musi postać solidną godzinkę, żeby temperatura lustra wyrównała się z temperaturą otoczenia. Zanim tak się stanie, to konwekcja i deformacja zwierciadła psuje całkowicie obrazy (najlepiej jak wyciągnąłem teleskop z nagrzanego po całym dniu samochodu. Obraz wyglądał wtedy jakby patrzeć przez gotującą się wodę). Tutaj wychłodzenie zajmuje paręnaście minut, akurat tyle aby sprzęt rozstawić. To co planuje aby zostało ze mną dłużej to montaż EQ3-2. Czyli jeden z najprostszych montaży paralaktycznych Sky Watchera (montaże paralaktyczne są wykonane tak, że jedną z ich osi obrotu ustawia się na gwiazdę północną, dlatego kompensowanie obrotu sfery niebieskiej wymaga pracy tylko jedną osią.). nie jest może najsolidniejszym montażem świata, ale z refraktorem tej wagi radzi sobie bardzo dobrze. Montaż doposażony został w napęd jednej osi. Celem tego napędu jest automatyczne kompensowanie uciekających (przez obrót Ziemii) obiektów. Mimo swojej prostoty, to nawet na 4 minutowych ekspozycjach gwiazdy pozostają kropkami. Do tej pory udało mi się wyciągnąć ten teleskop na światło nocy tylko raz, w ostatnią niedzielę. Jako cel swojej pierwszej astrofotografii wybrałem Galaktykę Andromedy (co okazało się średniawym wyborem, ale o tym zaraz). Ustawiłem ISO na 600, czas naświetlania na 8s, wycelowałem w galaktykę i zrobiłem fotkę. Wyszło to jakoś tak: I nawet widać na tym zarys galaktyki Andromedy. Oczywiście - uzyskanie tej klatki było bardziej skomplikowane niż pointn'shoot. Przede wszystkim - ustawienie ostrości jest bardzo trudne na oko. Światła jest mało, trzeba się posiłkować długimi ekspozycjami patrzeć czy gwiazdy zrobiły się mniejszy, czy większe niż na poprzedniej próbie itp. Na przyszłość - zrobiłem już sobie maskę Bahtinova, więc problem nie powinien już być tak duży w przyszłości. https://en.wikipedia.org/wiki/Bahtinov_mask Drugi problem to było kadrowanie. Pierwszy raz z montażem paralaktcznym jest... dziwny. Tzn. w Dobsonie chwyta się za telepa, i przeciąga gdzie się chce, tutaj nie ma tak łatwo. Później okazało się, że jest nawet łatwiej, ale weź to człowieku wymyśl na polu w nocy W astrofotografii robi się tak, że robi się kilkanaście do kilkuset fotek, a następnie cyfrowo sumuje się ich piksele. Tamtej nocy zrobiłem 460 fotek po 8s, łącznie około godziny ekspozycji. Po poskładaniu w całość (w Deep Sky Stackerze) i obrobieniu (w GIMPie) wyszło mi coś takiego: I nawet wyszła galaktyka, ale... Po pierwsze - Andromeda to nie był dobry wybór na początek. Tzn. teoretycznie akurat ma taki rozmiar, żeby się zmieścić w jednej klatce mojego układu (ba, Andromeda zajmuje na niebie więcej miejsca niż księżyc w pełni). Problem polega na tym, że jak się weźmie pod uwagę winietę, drobne ruchy montażu itp. to okazuje się, że w praktyce może 2/3 pola jest użyteczne. W efekcie Andromedę wypadałoby zmozaikować. Tzn. zrobić serię zdjęć, gdzie Andromeda będzie w środku i 4 serię zdjęć, których obszary środkowe wyjdą w okolicy rogów pierwszej serii. W efekcie powstałoby zdjęcie o 2x większym rozmiarze kątowym i byłoby z czego ciąć, żeby pozbyć się aberracji. Po drugie - Andromeda to galaktyka, świeci w bardzo szerokim spektrum, do tego w sporej części w pomarańczu. Zdjęcia robiłem na Pałacowej, stamtąd Andromeda akurat wypada nad oświetloną sodówkami drogą. W efekcie całą lewą część zdjęcia zjada smog świetlny, a ja nie mogę tego wyciąć, bo wytnę też galaktykę. Następnym razem wezmę na cel jakąś mgławicę emisyjną, prościej będzie wyciąc zaświecenie. Po trzecie - do poćwiczenia obsługa GIMPa. Totalnie nie znam się na grafice rastrowej, wszystko to dla mnie nowość. Np. jestem przekonany, że da się pozbyć śladów aberracji chromatycznej z co jaśniejszych gwiazd, tylko, że ja nie wiem jeszcze jak. Ogólnie - długa droga przede mną jeszcze. Chce np. potestować fotografię z filtrami barwnymi (mam komplet filtrów RGB, więc teoretycznie da się z tego poskładać później kolorowy obraz). No i celów na niebie jest dużo, bardzo dużo. Więc pytanko do Was - wrzucać fotki i postępy? Wiem, ze za dnia to się w niebo gapić lubicie, więc może i noc kogoś tu interesuje
-
Holybro Kakute F7 - jaki GPS ?
Patryk Sokol odpowiedział(a) na Artem85 temat w Elektronika platformy
No to już masz powód. Na NMEA to nie działa dobrze po prostu -
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Jurku, jedna rzecz. Raczej żaden z modeli którymi latasz na codzień nie ma tak cienkiego czoła klapy. Więc wszelkie doświadczenia ze snap-flapem możesz wyrzucić przez okno, bo w tego typu profilach działa to inaczej. Niech chłopaki robią jak mówię, to będą zadowoleni. Nie wiem czy widziałeś fotki, ale ja tym modelem latał, to jest jak najbardziej przetestowane... Oczywiście, każdy ustawi to pod siebie, ale po co mają zaczynać od wyważania otwartych drzwi? Bazę mają. -
Coś koło 10 zamówień tam zrobiłem. Nie ma o czym opowiadać, zawsze wszystko ok.
-
Ok, coś co może wydać się głupie, ale warto żebyś ro zrobił. Umocuj na końcach rurek jakieś ciężarki po około 40g (symulacja silników), zawieś na żyłce, czy nitce krzyżak z obciążeniem za środek i uderz go lekko jakimś prętem. Innymi słowy - potraktuj to tak jakbyś chciał pograć na trójkącie. Kiedy tak zrobisz to powiedz czy dźwięk jaki to wydawało był niski czy raczej wysoki. Pomysł wynika z tego, że boję się trochę o drgania rezonansowe w takim krzyżaku i jeśli będzie miał bardzo niską częstotliwość drgań własnych, to możesz nie być w stanie wyregulować quada zrobionego w ten sposób, żeby chciał dobrze latać.
-
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Masz źle zrobioną dźwignię do lotki. Przy takim układzie masz większy zakres ruchu do dołu, niż do góry (dokładnie na odwrót niż potrzebujesz). Oś dźwigni powinna wypadać a osi zawiasu (dla lotki). Dostałem też pytanie o wychylenia na PMa, więc napiszę tutaj: Jeśli chodzi o zakręcaie: Lotki 20-30st do góry (kwestia preferencji) i połowę z tego do dołu Klapy chodzą za lotkami w proporcjach 2:1 (klapa robi połowę ruchu lotki) Do lotek warto domiksować ster kierunku, ale ile to musicie sprawdzić. Do utrzymania kadłuba w osi, trzeba tym więcej steru kierunku im model leci wolniej i na większych klapach, więc stopień domiksowania dobieracie na prędkości, a więcej dodajecie z ręki (za dużo steru kierunku wytraca prędkość, za mało nie jest takie złe, więc miksowanie w dolny zakres jest ok) Do butterfly'a: Lotki 30st do góry, klapy w dół ile wlezie. BF KONIECZNIE na drążku, na suwaku (czy o zgrozo pstryczku) będziecie model z ziemi zbierać. Ster wysokości idzie w dół, żeby skompensować zadzieranie. Lepiej żeby model opuszczał nos w BFie niż zwalniał, tak jest dużo bezpieczniej. Klapy itp: Do sterowania prędkością to klapy chodzą równo z lotkami. Konfiguracja przelotowa jest na klapach ustawionych na 0st, prędkościowa klapy 2st do góry, a termiczna na klapach do +5st w dół. Klapami pracuje się tu płynnie, tzn. powinny być na suwaku. Miks steru wysokości do klap: Dla tego modelu bardzo istotny jest miks steru wysokości do klap (razem z lotkami oczywiście). Czemu, pisałem tutaj (w rozdziale A.5.2): Miks do steru wysokości ma wyglądać tak, że do maksa SW w dół klapy wychylają się na 1st w górę (czyli dla konfiguracji prędkościowej klapy wychodzą na -3st), a do zaciągnięcia SW klapy wychylają się o 4st w dół (czyli zaciągając drąga w klapach do pełnej termiki dobijamy +9st). Krzywa zaś powinna wyglądać tak, że już dla połowy wychylenia steru wsyokości osiągamy pełne wychylenie klap i lotek, a przez dalszy zakres już się one nie ruszają (czyli takie odwrotne expo). Ster wysokości/kierunku: Czym chata bogata, im więcej tym lepiej. Tzn. Przy naprawdę wolnej termice, to każda zapasowa reakcja się przyda, szczególnie, że ten model krąży naprawdę, naprawdę ciasno, więc i prędkości miewa wtedy żadne (szczególnie, że Wasze egzemplarze są sporo lżejsze jak mój prototyp) I taka mała rada: Do oblotu róbcie od razu wszystkie miksy. To nie makieta, gdzie każdy miks może być zabójczy, bo nie wiadomo czy model nie zrobi czegoś dziwnego. Zróbcie wszystko jak Wam mówię, a będziecie zadowoleni od pierwszego lotu. Szczeólnie latanie bez SW do klap jest męczące. z tym miksem model prowadzi się zupełnie inaczej. A jak znajdę chwilę czasu w tygodniu, to Wam zrobię takie fajny szablony do wydrukowania. Przyłożycie to wtedy do skrzydła i pokaże Wam wszystkie wychylenia klap jakie potrzebujecie Tymczasem - mój Quantum odwiedził Sudety: Silnika użyłem chyba raz, a zrobiłem trzy loty. Wiatru wprawdzie zero, więc zbocze nie pracowało, ale termika taka, że często trzeba było się ratować, bo zbyt ostro w górę zasysało. No i masa ptaków drapieżnych, to zawsze miły akcent.