Patryk Sokol
-
Postów
3 720 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
107
Treść opublikowana przez Patryk Sokol
-

Casa Aviocar 212 budowa
Patryk Sokol odpowiedział(a) na WINGS ONLY temat w Konwersje spalin na elektryki i elektryczne "giganty"
To bywa bardzo grube założenie I nawet nie mówię tu o darmowych planach. I tu masz słowa klucze. Mi też się wydaje, że będzie latał, ale doświadczenie mnie nauczyło bardzo bolesnie, że to co mi się wydaje znaczy bardzo mało. Dlatego chcę ten model szybko przeliczyć, żeby zamienić subiektywne odczucie i wydawanie na konkretne dane. Wierz mi - tak jest taniej. -
Casa Aviocar 212 budowa
Patryk Sokol odpowiedział(a) na WINGS ONLY temat w Konwersje spalin na elektryki i elektryczne "giganty"
Przecież tak to nie działa. Symetryczne profile produkują znacząco mniej siły nośnej, niż profile asymetryczne i zastosowanie takiego zawsze będzie skutkować mniejszym maksymalnym współczynnikiem siły nośnej, niż jakbyś zastosował asymetryczny. Dodatkowo - zastosowanie czegoś z tak cofniętym punktem największej grubości wręcz gwarantuje tendencję do paskudnego przeciągnięcia. Dlatego wciąż sugeruję koledze, żeby podrzucił skan planu, żebyśmy to sprawdzili. I zanim powiesz - akrobaty wcale nie latają na tak dużych współczynnikach siły nośnej jak się wydaje, mają po prostu dużo powierzchni nośnej. -
Jeden dziad. Tzn, jeśli byś potrzebował 765 to byś wiedział, że potrzebujesz 765 Jedyny haczyk - musi wystarczyć Ci wyjście na 8 serw Można, zobacz jak stosuję to np. tutaj: Aczkolwiek - 9kg to dużo. Ja bym się neico stresował, parę już takich FCków spaliłem Kupować do tego musisz tylko GPS, reszta jest wbudowana Może tak z grubsza być. Ale nie musisz grzebać w mechanice, neutrum serwa można ustawić z poziomu OSD Horizon to tryb angle w którym powyżej pewnego wychylenia model robi beczkę. Zalet ma dokładnie zero i należy go zakopać. W samolocie tryb angle ma sens tylko w połączeniu z altitude holdem, inaczej to nie ma sensu
-
Eachine jest fajny, jeśli nie spali się przy pierwszym podłączeniu pakietu. Niestety - track record tej firmy jest średniawy. iFlighty są zdecydowanie solidniejsze. Sporo ich elektroniki używam i naprawdę dzielnie znosi to co im robię. Z reglem sprawa generalnie jest taka, że zawsze polecam brać regler na BLHeli-32, bo niewiele się do niego dopłaca, a parę rzeczy ułatwia. Jednak - BlHeli-S można obecnie zastąpić firmwarem JESC (za parę dolarów wprawdzie, ale jednak). W efekcie regler na BLHeli-S również oferuje wtedy dwukierunkowego Dshota (podaje FCkowi jak szybko silnikami kręci) i w efekcie w locie nie ma opcji żebyś odróżnił BLHeli-S od BLHeli32. Niemniej - te parę dolarów to różnica w cenie między reglem na BLHeli-32 i BLHeliS, więc kiedy wybór jest to nie warto się w to bawić. Silniki zaś to inna kwestia. Jeśli kupujesz pierwszego quada (a to Twój pierwszy taki quad, bo 450tka to inna para śmigieł), to totalnie olej kwestie rozmiaru, kV, koloru, czy czegokolwiek. Tak długo jak kupujesz współczesny silnik quadowy, tak długo pierwsze dodanie gazu wgniecie Cię w fotel Dlatego interesuje Cię solidność silników, bo tłuc to tym będziesz częściej niż się spodziewasz (szczególnie jeśli poczujesz bluesa i zaczniesz latać freestyle). I tutaj - iFlight wygrywa o cztery długości ramy - silniki iFligta to top klasa wytrzymałościowa. Zarówno w high endzie (uwielbiam swoje Xingi 2208 ❤️ ), jak i w klasie niższej (czyli te Xingi-E). Stąd ja bym wziął iFlighta pewniejszy sprzęt jest to po prostu.
-
Casa Aviocar 212 budowa
Patryk Sokol odpowiedział(a) na WINGS ONLY temat w Konwersje spalin na elektryki i elektryczne "giganty"
Dokładnie tak samo się nabrałem Niemniej - profil w modelu wygląda zadziwiająco podobnie do pełnowymiarowego samolotu. Sprawdziłbym jak to się zachowywać będzie, tak dla spokoju. -
Casa Aviocar 212 budowa
Patryk Sokol odpowiedział(a) na WINGS ONLY temat w Konwersje spalin na elektryki i elektryczne "giganty"
A ok, jak robisz z planów to stateczniki powinny być ok. Tzn. martwiłem się, że po prostu przeskalowałeś pełnowymiarowy samolot, a to jest zawsze recepta na katastrofę (samoloty mają mniejsze stateczniki niż modele powinny mieć). Martwi mnie za to profil jaki masz w tym modelu, bo absolutnie nie wygląda jak coś co byłoby jakoś specjalnie nośne przy takiej liczbie Reynoldsa. Trochę się obawiam, że jest to profil z pełnowymiarowego samolotu, który autor planów tu wstawił. Przy tym rozmiarze latać tu będzie, ale boję się, że charakterystyka przeciągnięcia będzie aż nadto makietowa. Jeśli wrzucisz skan tego profilu z planów (albo jak masz go w formacie wektorowym), to mogę sprawdzić jak to się będzie zachowywać, tak w ramach pochwały dobrego rzemiosła -
Kąty natarcia w skrzydełku
Patryk Sokol odpowiedział(a) na Marcin temat w Skrzydełka, kaczki i "odrzutowce"
Katy w angle mają wpływ na os lotek i os steru kierunku. Dla osi steru wysokości ma to znaczenie w quadzie, gdzie za trzymanie wysokości odpowiada bezpośrednio przepustnica. -
Kąty natarcia w skrzydełku
Patryk Sokol odpowiedział(a) na Marcin temat w Skrzydełka, kaczki i "odrzutowce"
Tak. Jeśli chcesz poeksperymentować z prędkością przelotową to zainteresuj się tym: https://github.com/iNavFlight/inav/blob/master/docs/Inflight Adjustments.md Pozwala to przestawiać stałe parametry w locie. To co Cię interesuje to parametr NAV_FW_CRUISE_THROTTLE Jęsli masz włączoną stabilizację i masz włączone utrzymywanie wysokości to przestawiając ten parametr zmieniasz zadaną przepustnicę. Dzięki włączonej stabilizacji wysokości to dla każdej przepustnicy znajdzie sobie taki kąt natarcia, zeby nie opadać i się nie wznosić, więc będziesz miał różną prędkość. Warto sobie jeszcze wrzucić na OSD parametr mAh/km żeby określić która przepustnica odpowiada maksymalnemu zasięgowi (pamiętaj tylko, że iNav ma prędkość z GPSa więc do tej kalkulacji bierze pod uwagę wiatr) -
Kąty natarcia w skrzydełku
Patryk Sokol odpowiedział(a) na Marcin temat w Skrzydełka, kaczki i "odrzutowce"
Nie będzie trzymał takiego kąta przecież. Autopilot w iNavie działa tak, że ustala Ci zadaną przepustnicę i tak dobiera kąt natarcia, aby model nie opadał. Dopiero na wznoszeniu wchodzi pomiar kąta, żeby domiksować wysokość. -
Casa Aviocar 212 budowa
Patryk Sokol odpowiedział(a) na WINGS ONLY temat w Konwersje spalin na elektryki i elektryczne "giganty"
Tak na wszelki wypadek - jaki profil skrzydła i jak dobrałeś powierzchnię stateczników? -
To najgorsza rzecz latać na takiej aparaturze. Jakby mnie ktoś zapytał, czy wolę latać na takiej aparaturze, czy cios młotkiem w czoło to brałbym latanie na tej aparaturze jednak. Ale zadowolony bym nie był. To parametry autopilota, nie GPSa Tylko w trybie stabilizacji. W manualu będzie uciekał to w jedną to w drugą. Upewnij się, że luz jest na aparaturze (tzn. w zakładce Rx będzie odczyt pozostawiać po róznych stronach), a nie na serwie
-
Acro działa jak sterowanie quadem. Tzn. sterujesz nie wychyleniem, a prędkością kątową. Ma to taki skutek uboczny, że kiedy drążki są w zerze, to iNav automatycznie gasi wszystkie odchylenia (bo ma mieć zerową prędkość kątową, a jest niezerowa). W manualu zaś serwa dążą za drążkiem. Przydatność acro w samolotach się waha. Tzn. typowe skrzydło do FPV jest tak mułowate, że nic to nie daje, zaś w moim Funjecie FPV to powoduje,że model leci jak po sznurku i trzyma każdy kąt jaki zostawiłem. Tzn. kiedy ustawię 40st wznoszenia, to będzie tak trzymał. Ale Funjet ma dużo mocy, mały moment bezwładności i szybkie serwa. To jest fajna funkcja, ale uruchamiaj dopiero po wyregulowaniu modelu. Inaczej może być zabawnie. Autotrim jedyne co robi to przepisuje pozycje zerowe serwomechanizmów i nie jest konieczny, żeby model latał dobrze. Mechanizm autotrima jest taki, że przepisuje pozycje zerowe serwomechanizmów na takie jakie są obecne wychylenia. Tzn. w trybie acro model będzie dążył do zerowych prędkości kątowych (na niewychylonych drążkach) i takie pozycje zapisze do serw. W manualu - wpisze Ci to co sam wychylisz na drążku (tzn. trzymasz drążek w lewo, bo model ucieka w prawo, włączasz autotrima i model zaczyna uciekać w lewo, bo neutrum się przesunęło). W angle/horizonie - podobnie wrzuci Ci to co ma do lotu poziomego. Niemniej - jeśli model nie jest jakoś wybitnie krzywy, to autotrim zmienia cokolwiek jedynie w manualu. W innych trybach regulator PID sam to ogarnie. Dodatkowo - autotrim ssie... Tzn. może np. wytrymować model w trawers (czyli SK w lewo, lotki w prawo i model leci po prostej, tyle, że zjada o połowę więcej prądu). No i potrafi być debilnie nieprecyzyjny. Suma summarum - sam używam autotrima jedynie do punktu wyjściowego. Później ręcznie poprawiam pozycję serw podpinając model pod USB. Radio ZAWSZE ma trymy na zero. Zerowe ustawienie drążka zawsze ma pokrywać się z 1500us w zakładce receiver w iNavie. Jeśli cokolwiek potrymujesz w radiu, to w efekcie jak włączysz tryb stabilizacji, bądź acro to model zawsze będzie gdzieś uciekał, bo odcylenie od pozycji zerowej iNav zinterpretuje jako wychylenie drążka (bo przecież nie ma jak odróżnić czy pozycję kanału przesunąłeś drążkiem czy trymem). Pozycje serw (i wychylenia) poprawia się jedynie pod iNav configuratorem. To oczywiście dla prostego modelu. Np. w moim Jantarze jest milion miksów bezpośrednio podpinanych do serw. Działają one tak, że kiedy zmieniam tryb lotu, to są one wyłączane i radio zachowuje się już tak jak iNav tego oczekuje. Autotune to pierwsze co robisz po regulacji modelu. Szkoda czasu na latanie bez autotune'a Jakie parametry? Wag GPSa nawet nie tykaj, nic Ci to nie da
-
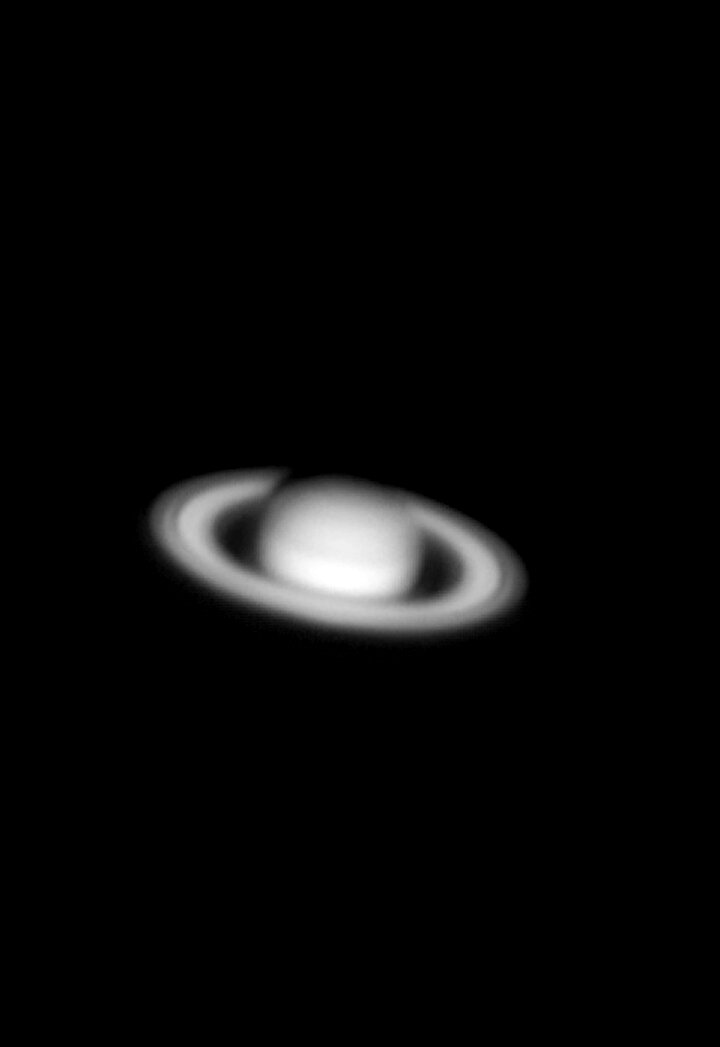
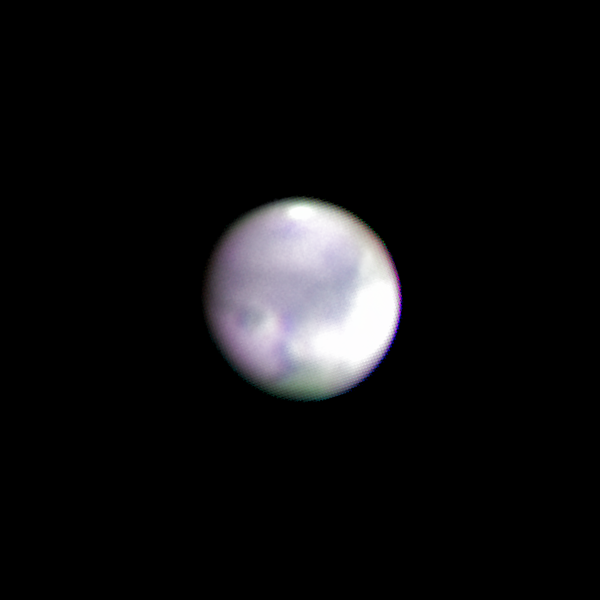
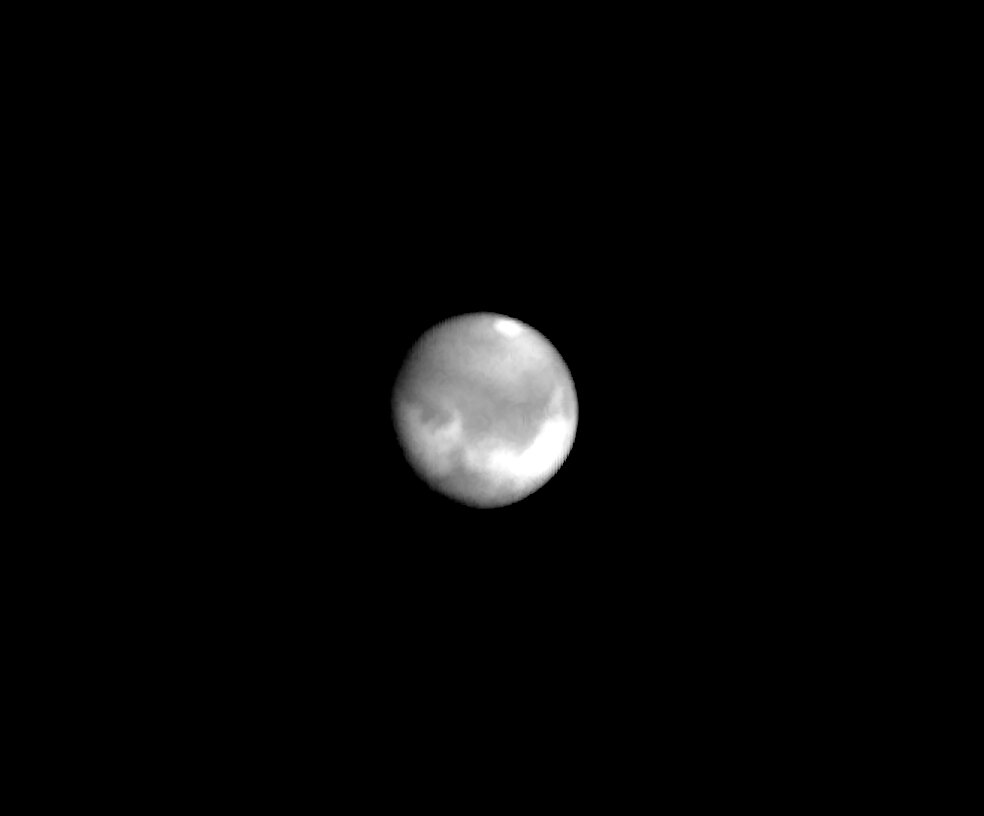
Na razie wciąż nie mam blachy mocującej silniki do montażu, bo ciężko się dopchać do lasera w robocie Ale za to dotarł do mnie inny element mojego zestawu do guidingu, czyli kamera ZWO ASI120MM mini. Low-endowa kamerka planetarna, która ma być wręcz idealna do guidungu ze względu na wysoką czułośc. Lunetki do guidingu też jeszcze nie mam, więc zostala mi tylko jedna rzecz do zrobienia. Pofotografować planety W tym celu praktycznie od razu z poczty pojechałem na Pałacową ze sprzętem i... I zamiast fotografować to utknąłem z obserwacjami wizualnymi, bo tak dobrego seeingu jak miałem o zmroku wczoraj, to nie miałem odkąd posiadam mojego 10" Newtona. Nawet z okularem 9mm i soczewką Barlowa obrazy miałem idealnie ostre. Tak kosmatego Jowisza, to jeszcze na oczy nie widziałem Niemniej - kiedy się zebralem do fotografii, to Saturn był już sporo niżej, zrobiło się mgliście itp. Wyniki jakieś tam jednak mam. Najpierw Saturn: Jest to zdjęcie zrobione jedynie w paśmie podczerwonym (później czemu). Widać przerwę Cassiniego, widać cień Saturna na jego pierścieniach i nawet pasy na jego powierzchni. Nawet nieźle to wyszło. Mogło być lepiej, ale źle nie jest No i Mars w paśmie podczerwonym: Nawet widać czapę polarną i struktury na powierzchni. Próbowałem też pobawić się fotografię z użyciem filtrów RGB i IR, gdzie IR miał służyć jako kanał do kalibrowania luminacji, a RGB do odwzorowania barwnego. Wyniki są jednak takie: Czyli zasadniczo żadne. Temat raczej jest do zarzucenia. Po pierwsze - nie mam koła filtrowego. W efekcie po każdej zmianie filtra muszę na nowo ogniskować cały układ. Czyli odjechać na jaśniejszą gwiazdę, znaleźć ją w polu widzenia optycznym szukaczem (wciąż nie mam GOTO), zogniskować używając maski i wrócić do planety. Po drugie - posiadane przeze mnie filtry nie są filtrami do astrofotografii. To są proste, tanie filtry do astronomii wizualnej. W efekcie każdy z nich ma gorszą ostrość niż filtr IR-pass (który już dedykowany do astrofotografii jest), a dodatkowo nie są one skalibrowane względem siebie, ani nie są parafokalne (czyli nawet koło filtrowe nie rozwiązuje tematu, bo zmieniałaby się ogniskowa). Po trzecie - nawet jeśli to mam za mały teleskop Niemniej - sprawdziłem, pobawiłem się, da się Pozostaje tylko jedno pytanie. Czy gdybym wziął swojego Newtona (który jest jednak sporo większy), dorzucił mu klin paralaktyczny, który wyrównałby oś obrotu podstawy z osią niebieską, dorzucił jakiś prosty napęd paskowy i robił foty z niego to może bym więcej ugrał? Raczej tego nie sprawdzę

-
Jak gór nie planujesz atakować to zmień oponki na coś do XC. Sam lubię Continental Crosskingi, bądź Smart Samy. Są idealne na moje wyprawy po 160km, gdzie 60km to asfalt, a 100km to szlak górski. Na tych co masz teraz to musiałbyś wjechać w cięższy teren, żeby poczuć różnicę na plus względem crosiarskich opon Ogólnie - opony to zdecydowana część oporu roweru.
-
Oczywiście, ze ładowarka potrzebuje zasilacz. Ale ta ma tak duży zakres napięć wejściowych, że dowolny polaptopowy śmieć się nada No ma taką funkcję. Nigdy z niej nie korzystąłem, ale ma
-
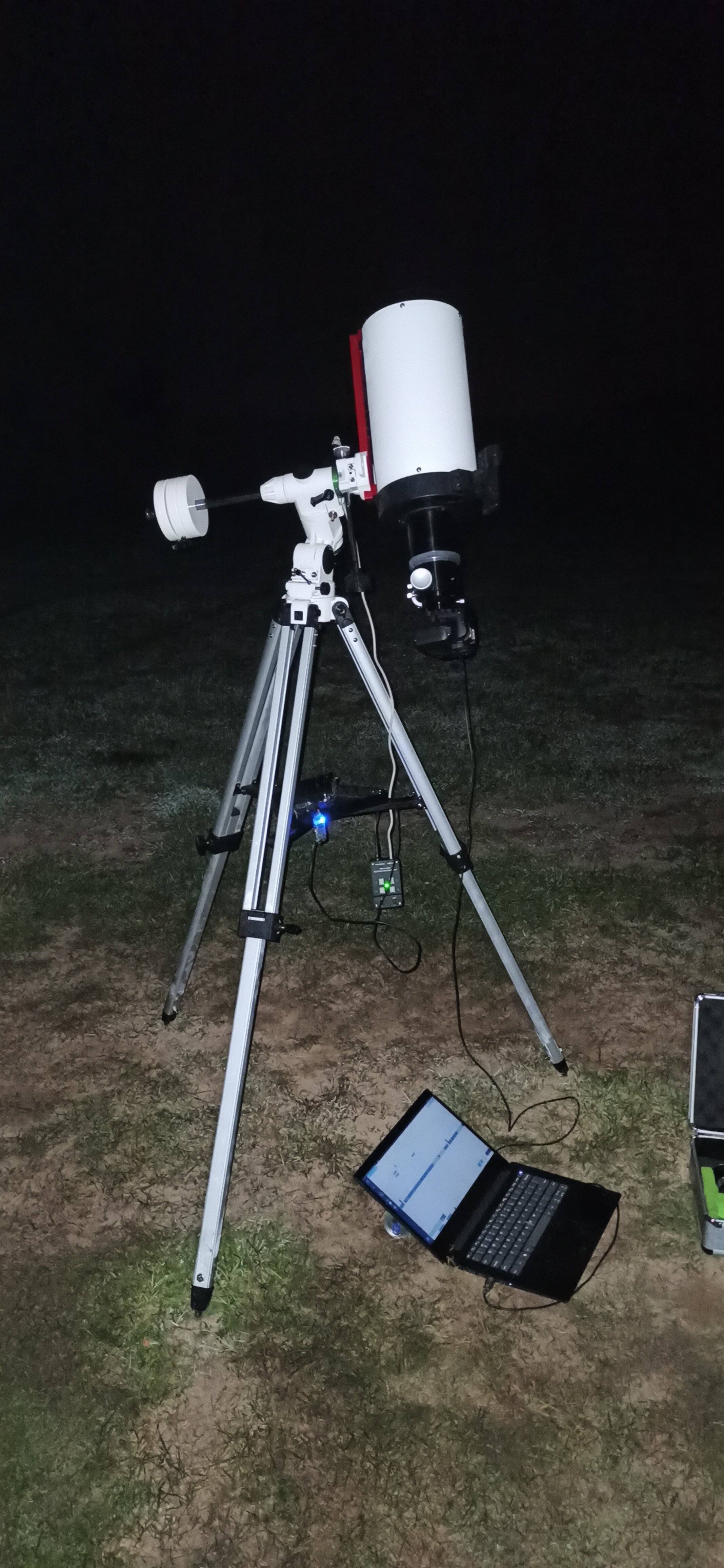
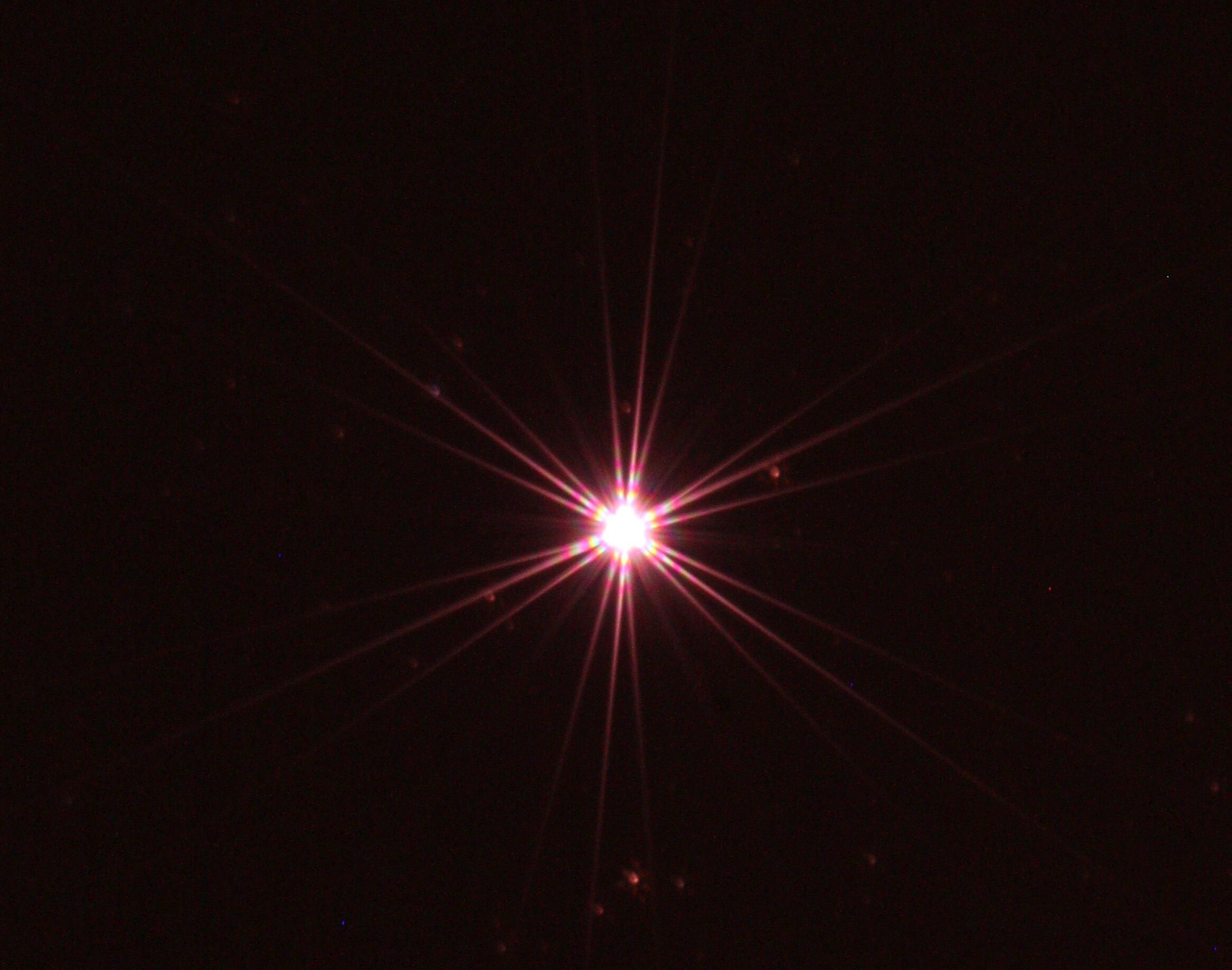
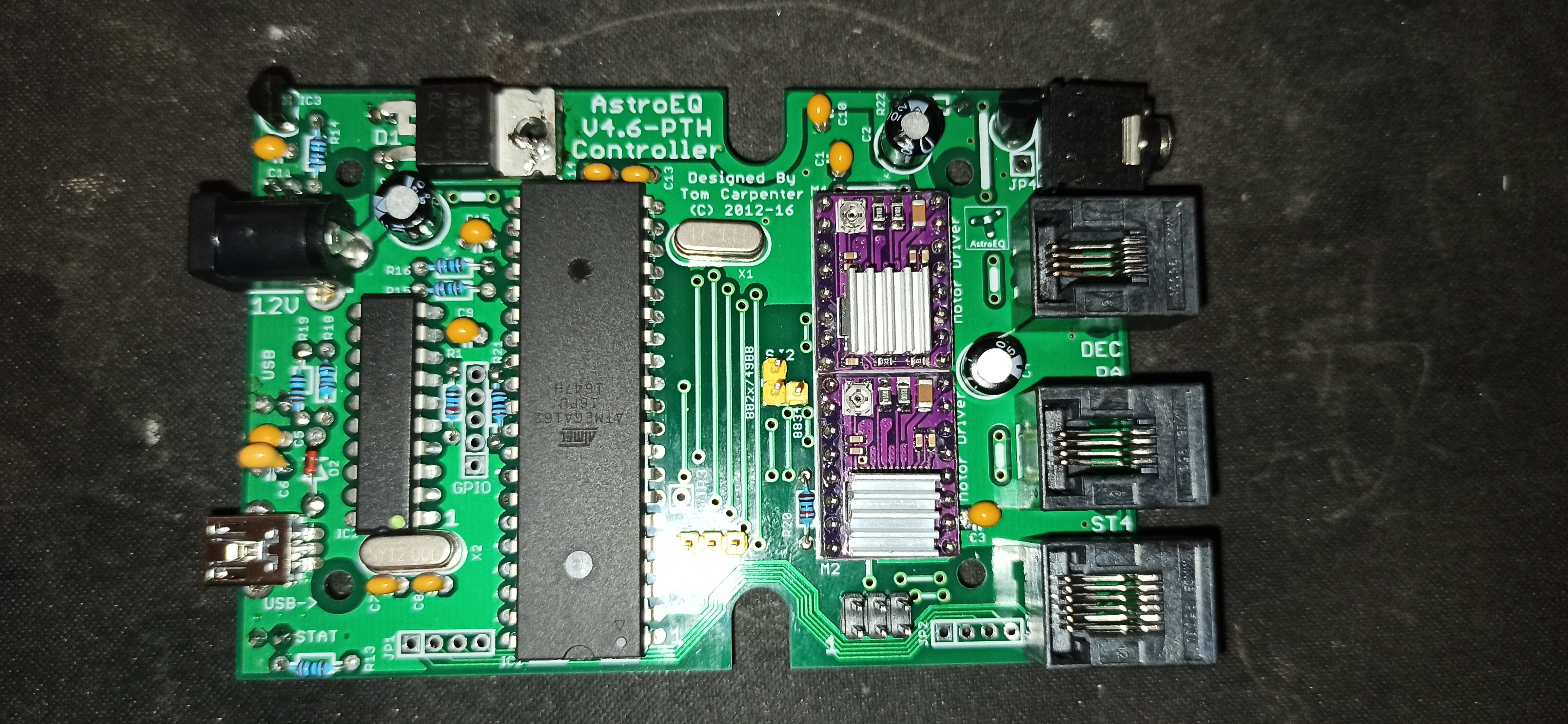
Trochę pozmieniało się w moim sprzęcie. Tzn. zdecydowałem się zmienić tubę optyczną na układ Ritchey'a-Chreteina, czyli układ dwóch luster hiperbolicznych. Ten układ poleciał na orbitę w teleskopie Hubble'a. I po tym jak poleciał, to okazał się być źle skolimowany, więc trzeba było zrobić kolejną misję aby go poprawić Kiedyś mnie to bawiło, ale ostatnio jakoś przestało Zaraz się dowiecie czemu. Tu już osadzony na montażu. Tuba ma 150mm apertury i 1350mm ogniskowej. Siłą rzeczy nie jest to szczególnie światłosilny układ, ale mało mnie to w sumie obchodzi póki co. Pewnie w przyszłości dostanie korektor pola, co zmniejszy mu ogniskową do 1012mm (są takie dedykowany do układu RC), ale póki co mi się nie śpieszy, na razie mi takie parametry wystarczą. W porównaniu do układu achromatycznego to ma same zalety, ale jedną olbrzymią wadę - kolimacja tego cholerstwa jest straszna ? Jak dotarł do mnie wysłany paczką, to poświęciłem grube godziny (dobrze ponad 20 roboczogodzin na kilka dni), wytargałem przy pierwszej okazji na ciemność nocnego nieba i... I wychodziło coś takiego: Czyli olbrzymia winieta, doprawiona aberracją komatyczną (patrzcie na gwiazdy na dolnej i górnej krawędzi zdjęcia, są wyraźnie przecinkowate) i przyozdobiona olbrzymią krzywizną pola (tego nie widać na zdjęciu, ale powoduje, ze plate solving często się nie udawał). Po sporym szukaniu metody na kolimację, z pomocą Wieśka (który ogólnie jest gwiazdą polarną w lunetce biegunowej tego projektu ) udało się znaleźć rozwiązanie polegające na kolimacji z użyciem maski dyfrakcyjnej. Jak ktoś potrzebuje to generator maski może znaleźć tutaj: http://svg2.mbsrv.net/astro/Tri-Bahtinov.html Założenie takiej maski na teleskop daje nam coś takiego na obrazie: Tu widzicie obraz nieskolimowanego teleskopu. Tzn. widać, że tylko jeden prążek przechodzi dokładnie przez środek, a pozostałe dwa są przesunięte. Z tym narzędziem musiałem już tylko kręcić śrubkami przy zwierciadle wtórnym przez dwie noce i udało się to skolimować. Ale... Jeśli to zajęło tyle czasu, komuś kto jest dosyć biegły w technice, optyce i tłuczeniu młotkiem, to totalnie nie dziwi mnie, że opinie o teleskopach w tym układzie są skrajne. Albo ludzie je uwielbiają, albo nienawidzą, nie ma środka I szczerze mówiąc - było warto.Teraz fotografie są równe, pole płaskie, plate solving idzie szybciutko, a obraz pozbawiony jest całkowicie aberracji chromatycznej, więc już nie muszę się szarpać z wycinaniem niebieskich obwódek pojawiających się wokół gwiazd I w końcu po trafieniu z kolimacją - trafiła się pogoda. Skierowałem więc teleskop na M33 - galaktykę w gwiazdozbiorze trójkąta. Zebrałem 2h światła i wynik jest taki: I jestem z efektu więcej niż zadowolony Ta sesja jednak pokazała znaczący problem. Tzn. cała impreza jest bardzo czuła na błędy w ustawieniu na gwiazdę polarną A nawet jeśli uda mi się ustawić montaż perfekcyjnie, to nikt mi nie obieca, że za godzinę nogi montażu nie osiądą nieco głębiej w gruncie i nastawy polecą przez okno. Dlatego powyższe zdjęcie składa się z 2h materiału naświetlanych po 20s, A to jest wręcz kryminalnie mało i skutkuje zbyt niskim poziomem sygnału do szumu. Stąd rozwiązanie jest tylko jedno - trzeba udać się w guiding. W tym celu zmontowałem już sobie płytkę do AstroEQ: Udało mi się już układ uruchomić, kręci silnikami krokowymi wręcz przemiło Teraz zostało osadzić silniki krokowe na montażu i podpiąć napędy (zdecydowałem się na paski zębate). Jutro w pracy postaram się na laserze wyciąć blachę mocującą oba silniki krokowe. Oczywiście zdjęcie całości pokażę, może kogoś to zainspiruje
-
Jak masz wydać tyle kasy, to kup sobie cuś takiego: https://pl.aliexpress.com/item/4000396427589.html?spm=a2g0o.productlist.0.0.74931607P4Tncd&algo_pvid=2592222e-65ea-4ae1-9da3-441ee925dac3&algo_expid=2592222e-65ea-4ae1-9da3-441ee925dac3-0&btsid=0b0a182b15999035617603926ede97&ws_ab_test=searchweb0_0,searchweb201602_,searchweb201603_ Jest to bardzo rozbudowana ładowarka modelarska, która ma dodatkowo tryb pracy jako zasilacz z ograniczeniem prądowym. Podpinasz wtedy drut do ładowarki i możesz regulować temperaturę napięciem jakie ładowarka podaje w trybie zasilacza. Sam używam tego rozwiązania do cięcia drutem, czy uruchamiania modeli na stole (bo jak zrobię zwarcie w instalacji, to ładowarka ograniczy oddawany prąd, więc jest większa szansa, że sprzęt przeżyje). To też by działało
-
Ważne pytanie - masz pomysł jak rozwiązać filtrowanie na Atmedze? To jest dosyć mocno zasobożerne, a Atmega tych zasobów nie ma za dużo. Jeśli koniecznie chcesz się bawić we własny soft (choć ja bym Ci doradził zabawę latanie quadem na zwykłym sofcie i obok rozwijanie swojego softu) i koniecznie chcesz mieć Arduino to rozważ Arduino oparte o STMa. Choćby taki BluePill.
-
Kadłub z ArtHobby to żelkotu w życiu na oczy nie widział. Użyj lakieru samochodowego, dwuskładnikowego. Raczej bym szedł w stronę barwionego lakieru, a nie bazy i glazury,
-
Jantar Magic F5J - jak to było liczone i jak wyszło w rzeczywistości
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Aerodynamika
A to jest ogólnie ciekawy temat. Tzn. osiągi są podobne, ale charakterystyka pilotażowa może być inna. To kwestia tego, że własności pilotażowe dużo trudniej skwantyfikować. Dziżas... Jurek... Jakie to ma znaczenie do czegokolwiek w tym wątku? Tak - model trzeba umieć prowadzić. Lepiej latający model ułatwiazycie pilotowi, gorzej latający utrudnia. Pilotów nie projektuje, ani nie robię, nie mam na to wpływu. Ten post jest całkowicie obok tematu wątku, bo tematem jest rzemiosło którym się zajmuje, a nie trening zawodniczy, czy eugenika pod kątem wyników zawodniczych. To nie mój problem - ja tylko modele projektuję. A Ty wiesz ile czasu zajmuje mi napisanie tego artykułu? Czas nie jest z gumy, niestety... Plus - tak się tylko upewnię, że wiesz - ja nie mam zysku ze sprzedanych Magiców, poza tym, że robią szum koło mojej usługi projektowania modeli. To już siłą rzeczy powoduję, że nie mogę sobie pozwolić na spędzanie nieskończonych godzin na tym projektem, kiedy mam kolejne zagadnienia w kolejce. No... I wchodzą tacy później do wątku o aerodynamice i piszą totalnie od czapy... -
Coś powyżej 2km - jakiś LRS?
Patryk Sokol odpowiedział(a) na Marcin temat w Nadawanie i odbiór, anteny
Ja powiem to co zawsze mówię - R9 działa bardzo, bardzo dobrze. Ale tak - coś z odbiornikami zaczynają kombinować. Tyle,że jak wejdziesz w R9 2019 to się problemów bym nie spodziewał, też działa z PPMa -
Jantar Magic F5J - jak to było liczone i jak wyszło w rzeczywistości
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Aerodynamika
A znam to podejście. Bawiłem się tego typu rzeczami, czy algorytmami genetycznymi (podobne, ale zamiast zadawać Cl/Cd, to może je maksymalizować). I to z reguły fajnie działa, ale problemem jest charakterystyka przeciągnięcia. Tzn. ona nie sprowadza się do jednego, czy dwóch punktów na wykresie, a raczej do kształtu krzywej. I tu nawet mu to wylazło, bo ten profil co wyprodukował ma okropną charakterystykę przeciągnięcia. Jeśli by udało się w jakiś sposób sparametryzować charakterystykę przeciągnięcia to by miało więcej sensu. Po zabawach narzędziami tego typu stwierdziłem, że to dobre do produkowania punktu wyjściowego, który później trzeba jeszcze poprawiać. Problem polega na tym, że do 95% zastosowań punkty wyjściowe już leżą w internecie... -
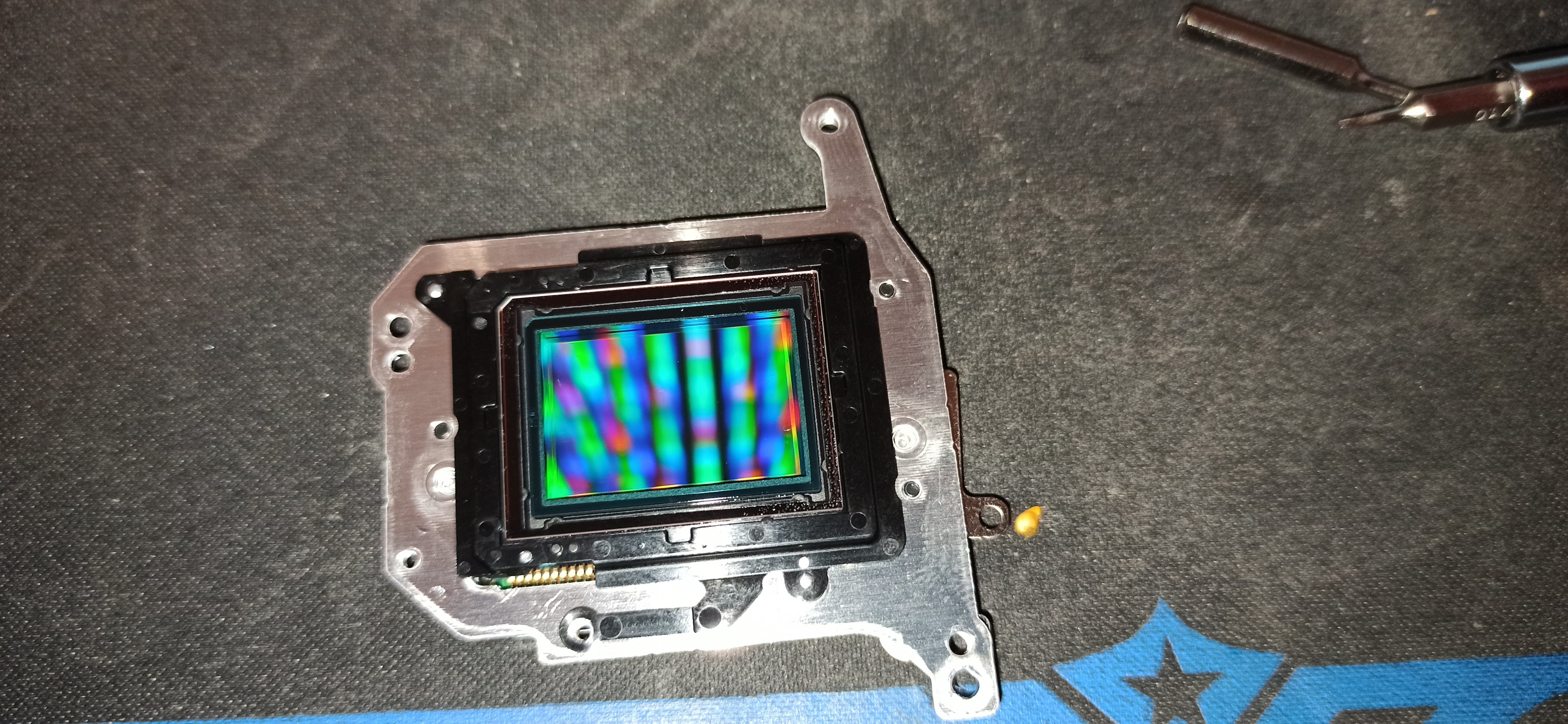
O stacji pogodowej jeszcze nie myślałem Sam jednak zrobiłem coś innego. Rozebrałem swojego Canona: Tu na fotce matryca, która jest zwyczajnie śliczna ❤️ I pozbawiłem aparat i filtra IR i filtra low pass. O dziwo udało mi się to poskładać w całość (nienawidzę tasiemek ? ) i co ciekawe mimo braku jakiejkolwiek płytki przed matrycą to kitowy obiektyw ostrzy prawidłowo w autofocusie. Miły bonus, jakby mnie kiedyś na fotografowanie drogi mlecznej wzięło. I na potwierdzenie, że to działa: Fotka zrobiona w praktycznie całkowitej ciemności, z piękną, różowiutką* podczerwienią. A tu fotka zrobiona pod monitoringiem osiedlowym, gdzie widać cudowną różowiutką* podczerwień Ogólnie sama przeróbka trudna nie była, na pewno nie warta płacenia takich pieniędzy: https://www.astroshop.pl/astromodyfikowane-lustrzanki-cyfrowe/canon-aparat-fotograficzny-eos-4000da-baader-bcf/p,61519 Gdzie praktycznie 2000zł dopłaca się do ceny body tylko za to, że ktoś wytłukł w nim niebieską płytkę Z drugiej strony - rozumiem, że wytłukiwanie filtra w aparacie może być nieco przerażające. Następny cel - spróbuję się zając takim projekcikiem: https://www.astroeq.co.uk/index.php Tak z czystej ciekawości i potrzeby samoekspresji *Oczywiście podczerwień jest niewidoczna, po prostu aparat ją tak przedstawia
-
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Po pandemii ? -
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Nie po to jest ten miks. Jeśli masz model ze wzniosem, to w prawidłowo skoordynowanym zakręcie, dla małego wychylenia lotek, kąt natarcia zewnętrznego do zakrętu skrzydła rośnie, a wewnętrznego maleje. Wychylenie klapy zmiksowane do lotek pozwala poprawić warunki pracy skrzydła w takich warunkach (opuszczenie klapy skutkuje lepszą pracą skrzydła dla wyższych kątów natarcia i vice versa). Dopiero od większego wychylenia lotek klapy mają zwiększać reakcję modelu na drążek, ale jak ktoś stosuje tak duże wychylenia, to w tej chwili raczej nie myśli oporach. Kolejną kwestią jest też to, że powyżej pewnego wychylenia przyrost oporu zaczyna być znacznie większy niż przyrost siły nośnej (szczególnie na zewnętrznym skrzydle, dlatego stosujemy rożnicowość), wtedy przerzucenie części odpowiedzialności na klapy się opłaca. Podsumowując - nie masz racji Poza tym - Ty serio uważasz, że tego nie sprawdzałem? Prosto powiadasz? To powiedz w jaki sposób. Ale od razu ostrzegam - jeśli polega to na wyizolowaniu samego momentu przechylającego i policzeniu jedynie przyrostu siły od przyrostu oporu, to wiedz, że nie tędy droga. Do tego modelu musiałby nie posiadać wzniosu, mieć symetryczny profil i znajdować się w warunkach zerowej siły nośnej. W sumia to dobre warunki do wyliczania stateczników do bomb, które przed eksplozją wkręcają się w grunt. Tam nam zależy na największej prędkości postępowej i największej prędkości obrotowej. Technicznie rzecz biorąc masz rację. Sam w Quantumie mam trochę bardziej złożonego miksa (bo u mnie miks lotek do klap i do steru kierunku jest zależny od ustawionych klap. W dużym skrócie - im klapy bardziej do dołu tym oba miksy większe) Problem polega na tym, że wchodzimy tutaj już na terytoria gustu, upodobań i stylu latania. Dorzuć do tego, że większośc użytkowników modeli nie ustawia nawet tak prostego miksa, a co dopiero bardziej złożonego. I później model zostaje z ledwo ustawioną różnicowością, bo "o co Ci chodzi, przecież lata" Dlatego zawsze podaje w miarę możliwości liniowe miksy. Jak ktoś to ustawi to już będzie bardzo dobrze, a jak będzie chciał lepiej, to już sobie dogra zależnie od swoich potrzeb.