






Pioterek
-
Postów
3 554 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
18
Odpowiedzi opublikowane przez Pioterek
-
-
Przedstawiam film (może nie nowy, ale po nowemu "dopieszczony") z lotów modelu PZL P.24 na imprezie "Polskie Skrzydła" 2014 w Radawcu.
Na uwagę zasługuje dobra i nie ustawiana współpraca kamerzysty (Grzegorz), prowadzącego i komentującego loty (Pietka) i pilota modelu. Dzięki temu powstał niepowtarzalny film bez cięć i montażu, ilustrujący cały lot modelu z naturalnymi odgłosami i towarzyszącymi emocjami oraz atmosferą panującą na lotnisku. Starty i lądowania modeli odbywały się z dość silnym bocznym wiatrem, spychającym dodatkowo modele na publiczność, w powietrzu był też spory ruch (szybowce, skoczkowie) stąd ostrzeżenia prowadzącego loty. Postanowiłem ten film przywołać w tym miejscu jako być może ciekawy.
-
Ja używając silników Robbe ustawiam auto timing - jak nie pomaga powoli zmniejszaj wartość timigu. Ilość pól możesz sprawdzić sam - policz bieguny (uzwojenia) w silniku. Start Up Strenght ustaw właśnie tak aby silnik nie szarpał przy rozruchu - zależy to od bezwładności ślinika ze śmigłem.
-
Jak by co, mam 3 spowalniacze serw Robbe na zbyciu.
-
Moje gratulacje, witamy nowego Wicherka

-
Film z lotów mojego modelu na pikniku:
-
Witam
Piotr, możesz zrobić trochę miejsca na swojej skrzynce odbiorczej ? Nie można wysłać do Ciebie wiadomości.
Ok, już czyszczę
Nazbierało się trochę - gotowe
-
Dualsky - kupiłem dwa pakiety 4S 4600 mAh, parametry super, lekkie, małe wymiary umiarkowane 25C. Okazały się porażką. Więcej nie napiszę, bo sprzedawca stanął na poziomie i dogadaliśmy się polubownie. Ale wrażenie niemiłe pozostało
-
Jeszcze co do polecanego przez Ciebie Robbe balansera. Podoba mi się funkcja monitorowania każdej celi. Ale mam pewne wątpliwości co do ograniczania mocy. Jednak wolałbym mieć pełną moc dostępną na "wszelki wypadek" w czasie lądowania.
Też podobnie myślałem na początku. Moje pakiety 8S choć kupowane u Chińczyka kosztują ok 300 zł, to spory wydatek i ważne dla mnie jest aby ich nie uszkodzić. Możesz być spokojny, MC Balanser daje odpowiednio wcześnie znać o wyczerpywaniu się pakietu (ściślej mówiąc - najsłabsza cela zbliża się już do 3,0 V) , pozwala kontynuować spokojnie lot (ale już bez akrobacji) j i spokojnie wylądować nawet z ponownym podejściem do lądowania. Ale najlepiej przekonasz się sam
W pracy serwa jest krótki moment kiedy serwo rusza - jego silnik pobiera wtedy największy prąd. Serwo wychylone (tzn. ster wychylony) to jest już stan normalnej, pracy można go wyliczyć zmierzyć itp.. Najgorsze są stany nieustalone - ale to już takie dywagacje teoretyczne.
Żarówki (te tradycyjne) przepalają się w momencie ich włączenia - stan nieustalony
-
No... jestem pod wrażeniem filmu o Józku - ładna pasująca muzyka, ciekawe ujęcia - wydłużyłbym tylko trochę czas wyświetlania zdjęć. Józek III lata naprawdę ładnie, jeżeli bez stabilizacji to również gratulacje dla pilota. Może pomyślisz o KIT ? Model bardzo mi się podoba - myślę, że po skończeniu SE5a, chętnie zrobiłbym taki model dla mojego Syna do Kanady.
Moje poprzednie pytanie dotyczyło momentu żyroskopowego od silnika. Pytam dlatego bo Twój model z założeń konstrukcyjnych jest bardzo podobny do Prząśniczki, którą namiętnie oblatywałem z miesiąc zanim zaczęła mi chodzić za ręką. Ma ona dwie cechy - zakręt głównie na SK co nawet jest dobre bo nauczyło mnie latać z wykorzystaniem SK w innych modelach, oraz moment żyroskopowy od silnika - trochę przeszkadza w wejściu w zakręt, pogłębia gdy model jest w zakręcie i przeszkadza w wyjściu z niego.
A jak jest u Ciebie ?
-
Witajcie,
ta sama zasada, co w Dualsky wskazanych przeze mnie 6 postów wyżej. Ale Cebulator zauważył b. ważną kwestię. W Turnigy pewnie jest tak samo. Wycinek z instrukcji Dualsky:
http://file:///C:/Users/Micha%C5%82/Downloads/VR_Pro_Instructions_Manual_cn_en.pdf
Strona 3 pkt: 1, 2, 3, 4
In order to ensure the VR Pro working properly, please obey thefollowing formula to limit the thermal power in a safe range:(1) (input voltage - output voltage) x output current < = 10W;(2) Please pay special attention to that, if the VR Pro currentis over 10W for a long time, the temperature will rise quickly,it will damage the regulator;(3) When the cooling fan is mounted (#46816, optional), thethermal power can be increased to15W;(4) VR Pro will not stop working when the input current is toolarge. But the internal limit working temperature is 120degrees. When the temperature is more than this limit, it willdamage the control IC.Czyli jak rozumiem pkt. 1 np.
pakiet 8s to ok. naładowany na max czyli ok. 33V "minus" np. napiecie wyjściowe ustawione na 6V to 27V "razy" ilość A wyjściowych (np. 3A pobierane przez 2 serwa i odbiornik "równa się" 27x3=81 W czyli 8x więcej niż wytrzyma ten regiel bez coolera.....? Pali się momentalnie...
Osobiście planuję to jako zabezpieczenie prądowe na 5 serw w spalinie i tu wydaje się to sensowne. Pakiet 2S czyli 7,4-8,2V , licząc 8V "minus" napięcie na serwa HV czyli 7,4V daje 0,6V x 6A (5 serw i odbiornik) da 3,6W
Poprawcie mnie jak się mylę.
P.S. A co do wzmiacniaczy to jest jescze pytanie czy instalować je tuż za źródłem nadawczym sygnału czy tuż przed odbiornikiem...
Piotrze, już nie odbiegam, oklejaj w spokoju kadłub i zamieść fotki. Robota w Twoim wykonaniu jak zwykle pierwsza klasa.
Wzmacniacze instaluje się tuż przed serwem - mają poprawić sygnał sterujący przed jego odczytaniem przez serwo.
Temat który poruszamy wcale nie jest taki jednoznaczny i oczywisty, dlatego wywołuje tyle komeraży. Można powiedzieć, że ociera się nawet o granicę filozofii budowy zasilania radia w modelu.
Ja na przykład założyłem sobie, że ze względów bezpieczeństwa (brak elementów pośrednich) będę zasilał odbiornik wprost - dlatego używam pakietów 5xNiMh. Pozostaje po drodze oczywiście jeszcze wyłącznik zasilania, który jest mechaniczny z wyczuwalnym 'pstrykiem' grubymi kablami i dobrej firmy. Ale wtedy pakiet NiMh musi być dobrej jakości i wydajności prądowej, żeby nie dochodziło do zbyt dużych spadków napięć przy ostrej pracy serw. Moje modele to nie akrobaty 3D i są wyposażone z reguły w serwa analogowe, więc stery pracują spokojnie i nie ma takich mocnych szarpnięć prądowych i tu NiMh mi się sprawdza.
Niektórzy z nas stosują podłączone wprost pakiety 2xLiFe, które mają 'nie ograniczoną' wydajność prądową więc spadek napięcia od strony źródła nie grozi, ale z kolei taki pakiet w momencie rozruchu serwa ma możliwość dać mu prawie nieograniczony prąd a czy to jest zdrowe dla samego serwa - nie wiem ?. Myślę więc że pewna elastyczność pakietu NiMh jest też i jednocześnie i jego zaletą. Z resztą mając duży model można połączyć dwa pakiety NiMh równolegle ze sobą zwiększymy wtedy bezpieczeństwo i wydajność prądową.
Na pytanie Pietki o regulator z HK - jak napisałem jestem przeciwny (tylko ze względu filozofię jaką przyjąłem) w stosowaniu elektroniki w zasilaniu radia. Dlatego w dużych modelach nie stosuję BEC czy UBEC, tylko zasilanie wprost. Jeżeli kiedyś będę zmuszony jednak taką elektronikę zastosować, to sięgnę po Powerbox bo to zbyt poważna sprawa, aby zdawać się na chińszczyznę. Nie chodzi tu o to że jestem jej przeciwny, tylko o to że potrafi być nierówna jakościowo, co w przypadku bezpieczeństwa modelu jest dla mnie nie do przyjęcia.
-
Ładny ten Józek, a jak z momentem żyroskopowym od umieszczonego z tyłu napędu ?
-
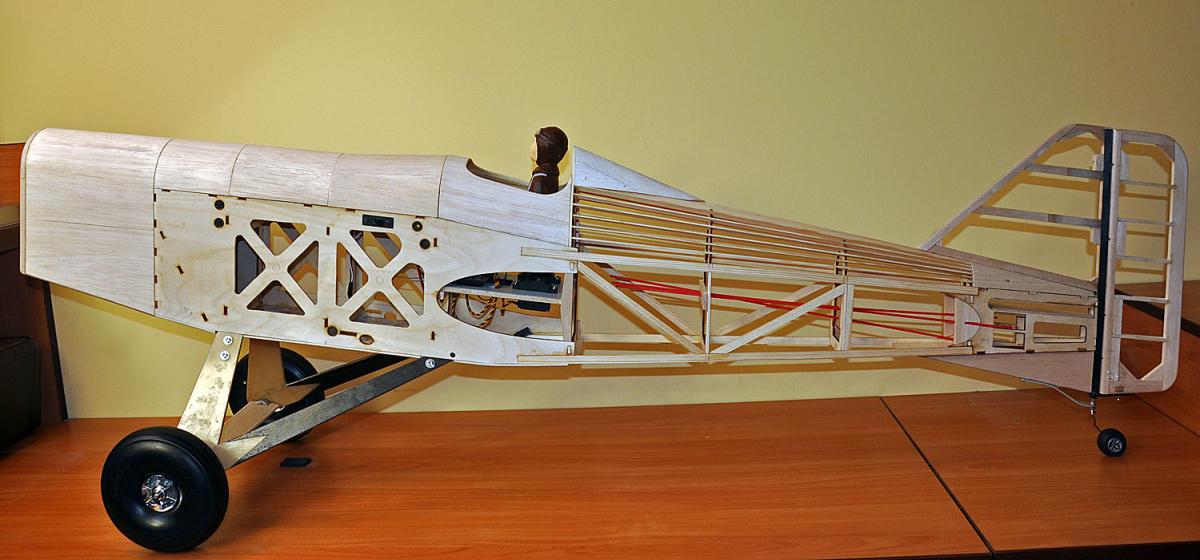
Powoli zabieram się za przygotowanie kadłuba do pokrycia folią. Ostatnio mozolnie wypełniałem balsą przestrzenie za kabiną pilota tak jak jest to w oryginale. Poszycie miękkie kadłuba nie zaczyna się zaraz za kabiną pilota.
Po pokryciu kadłuba folią zostanie do niego doklejona owiewka głowy pilota
-
Odniosłem wrażenie, że wszyscy odradzają Ci te wzmacniacze. Twoja wola, jak ma to poprawić samopoczucie pilota.
Ja osobiście wolałbym zainwestować pieniądze z tych wzmacniaczy w lepsze serwa.
Kondensator równolegle wpiąć w odbiornik. Nie widzę sensu dawania go na każde serwo w jego pobliże. O ładowanie kondensatora aż tak bym się nie martwił. No chyba, że planujesz kilka faradów. W końcu ładowany będzie tylko przy włączaniu, a jak w locie spadnie na nim napięcie do 0 to i tak już kiszka.
Pietka pisał o pojemnościach 1-2F to zdecydowanie za dużo 1000-4700uF wystarczy.
Tak widzę, wzmacniacze Koledzy odradzają i ja to zdanie jak najbardziej szanuję. Chciałbym jednak spróbować to ustrojstwo - myślę, że znana firma nie zadawałaby sobie trudu produkować coś co nie ma większego sensu praktycznego. Podobnie było z MC Balanserem Robbe - prawie nikt tego nie używał, spróbowałem a w tej chwili jest w każdym moim modelu. Serw używam ze średniej półki czyli Hitec - w tym modelu będą HS 635 HB. I cały temat dotyczy tylko dwóch serw do napędu lotek.
Jeżeli wepniesz kondensator w odbiornik to niczego specjalnie nie uzyskasz (to samo da Ci dobry "twardy" pakiet), przecież chodzi o uzupełnienie energii w miejscu gdzie następuje jej niedobór - czyli przy serwie - tam jest sens zainstalować kondensator. 200 uF już wystarczy żeby wywołać niezłe szarpnięcie w instalacji przy ładowaniu kondensatora od zera.
-
Dziękuję za dużą ilość informacji od kolegów:
Co do ferrytów - moje doświadczenia są jak najbardziej pozytywne. Frerryty wycinają zakłócenia, ale i również osłabiają trochę sygnał, więc tym razem ich nie użyję
Myślę że przy dłuższych kablach serw są dwa zagadnienia mogące wpływać na ich stabilną pracę. Pierwsze to spadek napięcia zasilającego serwo przy jego rozruchu i pod dużym obciążeniem, a drugie to zniekształcenie sygnału (fala prostokątna o określonej szerokości) sterującego serwo w takim stopniu, że przestaje ono porwanie go odczytywać.
Wzmacniacz sygnału umieszczony na samym końcu przedłużacza a tuż przed serwem ma za zadanie zadbać o właściwy standard sygnału PWM (odpowiednia stromość zbocza, brak zakłóceń). Chciałbym wypróbować to "ustrojstwo" robi to w końcu firma o znanej marce. Koszt tego układu jest do zniesienia, więc zastosuję to w moim modelu na zasadzie zebrania nowych doświadczeń.
Sprawa spadków napięcia jest już bardziej złożona.
Jak napisał Sławek wydajny prądowo pakiet radia to podstawa. Do kontroli napięcia swoich pakietów 2000 mAh NiMh radia używam tzw. "linijek diodowych" i widzę co się z nimi wyrabia przy ostrej pracy serw mimo, że pakiet jest nowy i dobrze naładowany. A jest to pomiar przy samym odbiorniku a nie na końcu przy serwie,
Kondensator doładowujący - teoretycznie prosta zasada działania, kiedy trzeba oddaje energię i szybko ją odzyskuje. Podczas lotu myślę, że bardzo pomoże. Rozumiem, że takie kondensatory, aby spełniły swoją rolę były by umieszczane na końcu przedłużaczy przy serwie. Mamy wtedy jeden moment niewiadomy - co stanie się z układem wyposażonym w takie kondensatory, kiedy załączymy odbiornik po dłuższym postoju. Nastąpi wtedy gwałtowny pobór energii na uzupełnienie pojemności rozładowanych kondensatorów. O tym jaka to może być niszcząca energia przekonałem się praktycznie przy budowie mojego dwusilnikowego modelu Mosquito. W modelu tym były dwa równolegle łączone pakiety i dwa osobne regulatory.
W regulatorach zamontowane są podwójne kondensatory elektrolityczne rzędu kilkuset uF które w momencie podłączenia regulatora do pakietu ładują się gwałtownie dając często małą iskrę.
Robbe dołącza nawet do swoich regulatorów taki mały pakiet "antyiskrowy" w postaci opornika, który najpierw dotykamy do "+" pakietu a dopiero potem zapinamy przewód.
W Mosquito miałem dwa regulatory więc i pojemność kondensatorów odpowiednio większa. Jakież było moje przerażenie, gdy po którejś z kolei próbie napędów spalił mi się nagle jeden kabel regulator-radio. Powodem tego nieprzyjemnego zdarzenia była moja wina (brak doświadczenia) w kolejności łączenia mas pakietów i radia. Jeżeli kogoś interesuje ten temat bardziej szczegółowo to został opisany pod linkiem:
Przytoczyłem ten przykład dlatego, aby zwrócić uwagę, że przy gwałtownym ładowaniu kondensatora mogą popłynąć całkiem spore prądy drogą - od pakietu poprzez wyłącznik zasilania, odbiornik radiowy do kondensatora przy serwie.
Myślę, że swoim modelu użyję tradycyjnie jednak grubych przewodów do przedłużenia kabli serwa.
-
Uważam, że nie ma potrzeby stosowania wzmacniacza sygnału przy odległości serwa od odbiornika wynoszącej 1300mm. Ja w swoich dużych modelach stosuję wyłącznie przewody skrętki o takich przekrojach kabli jakie ma kabel serwomechanizmu (ważne) na odległości nawet 2000mm bez żadnych zakłóceń i zaników sygnału. Oczywiście po drodze nie ma żadnych elektromagnesów czy silników szczotkowych.
Dzięki za informację.
A miałeś może kiedyś przypadki drgania serwa wokół położenia neutrum przy łagodnych wychyleniach drążka w APCE ?.
-
W nowym modelu serwa skrzydeł położone są w dość sporej odległości od odbiornika - ok. 1,3 m. W modelach gigantach stosuje się, już w takich sytuacjach stacje power-boxy - bardzo drogie urządzenia.
Mój model jest nie jest już mały, ale do gigantów jeszcze nie należy. Szukając pomysłu na stabilny sygnał docierający do serwa na lotkach znalazłem urządzenie "wzmacniacz sygnału" firmy Power Baox.
Czy ktoś z Kolegów stosował już może takie urządzenie ?
-
Adamie przepraszam, że tak została odebrana moja wypowiedź. Niepotrzebnie użyłem takiego sformułowania, za co przepraszam autora tematu.
Ale co do samego testu to zdania nie zmienię. Nie ma on, żadnego przesłania poza tym, że regulator działa.
Rozumiem, że regulator jest używany w zamkniętym szybowcu. Ale do testów powinien odbyć się test, w którym obciążony zostanie do przynajmniej 90% możliwości. Mam chiński regulator 30A, który pracuje w zamkniętym kadłubie przy 20A i nie wiem czym tu się dziwić.
Zdjęcie "wyselekcjonowanej" części mocy chyba nie jest z tego regulatora ( jeżeli jest to przepraszam, tak wygląda na zdjęciu).
Jeżeli już robimy takie testy i prezentacje na forum to proszę nie wciskajmy w to marketingowego bełkotu a jedynie ważne informacje.
Nie zaglądałem tu jakiś czas i widzę że temat się trochę ożywił:
Na początku chcę wyjaśnić Koledze, że nie otrzymałem żadnego wynagrodzenia za ten temat. Ponieważ nowy na rynku regulator ZTW B zainteresował mnie swoimi możliwościami programowania oraz pracą z pakietami LiFe postanowiłem się bliżej jemu przyjrzeć. A że starałem się to zrobić rzetelnie, dokładniej opisałem jego możliwości i programowanie oraz porównałem z używanymi prze zemnie regulatorami Robbe.
Prawie równolegle do mojego wpisu (patrz #9) pojawił się w "RC Przeglądzie Modelarskim" artykuł obejmujący również i próby obciążeniowe nowych regulatorów. Zdjęcie "rozebranego" regulatora jest właśnie z tego artykułu.
Co do uwag kolegi Cebulatora - myślę, że warto najpierw dać coś od siebie, zanim siedząc na tylnych rzędach zanosić się głosem krytyki.
Obecnie używam dwóch regulatorów ZTW 85 i 65 A z których jestem zadowolony. Zastępują mi one powoli stosowane do tej pory regulatory Robbe w modelach mniejszych gdzie nie wymagana jest optoizolacja. Regulator ZTW B 65A eksploatowałem w tym sezonie szczególnie intensywnie ponieważ model z nim służył do nauki latania młodszych Kolegów pilotów.
-
Czy mój model będzie wyważony prawidłowo ?
Jest to bardzo sensowne pytanie bo złe wyważenie modelu jest dużym zagrożeniem dla pomyślnego oblotu i w skrajnym przypadku kończy się efektowną kraksą.
Z SE 5a z HK Andrzeja mieliśmy sporą rozterkę, jak ten model wyważyć przed pierwszym lotem, ponieważ instrukcja modelu (według mnie) zawierała nieprawidłowe dane o ŚĆ tego modelu. Było on wskazywany dość blisko przedniej krawędzi górnego skrzydła. Porównując instrukcje z modeli innych dwupłatów jakimi latałem i obecnego SE 5A którego buduję punkt ten powinien być położony zdecydowanie dalej. Dodając do tego fakt, że prawidłowe wyważenie dwupłata jest dodatkowo bardzo zwodnicze (zawsze mu mało na dziobie) trochę polecieliśmy w ciemno - tym razem się udało trafić.
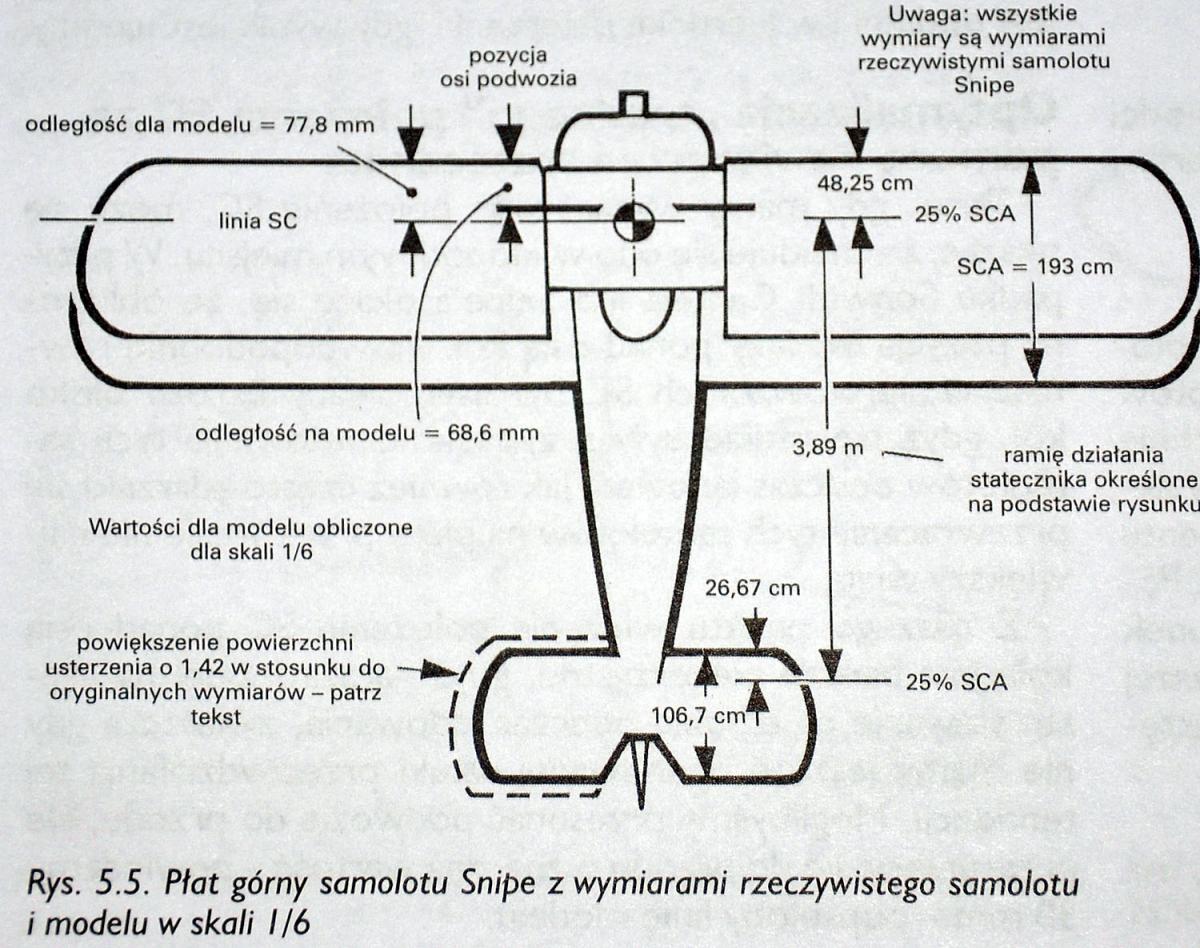
Postanowiłem jednak sprawdzić (sprawdzić nie wyliczyć) gdzie powinien znajdować się ŚĆ w moim modelu. Jak zwykle sięgnąłem po moją ulubioną książkę "Budowa Makiet Lotniczych" Gordona Whitehead. Korzystając z jednego z rysunków dwupłata zamieszonego w książce jak niżej:
Dokonałem pomiaru SCA na planie swojego modelu SCA wyszło 470 mm
Następnie przyjąłem wartość 25% SCA = 117,5 mm
Na planach mój ŚĆ występuje dokładnie w obliczonym miejscu. Myślę że do oblotu wartość ŚĆ została potwierdzona, co mnie bardzo cieszy.
Dopisano 05.01.2015
I tu mój nastąpił błąd, poprawne wyliczenie nastąpiło dopiero w p.#611 !
-
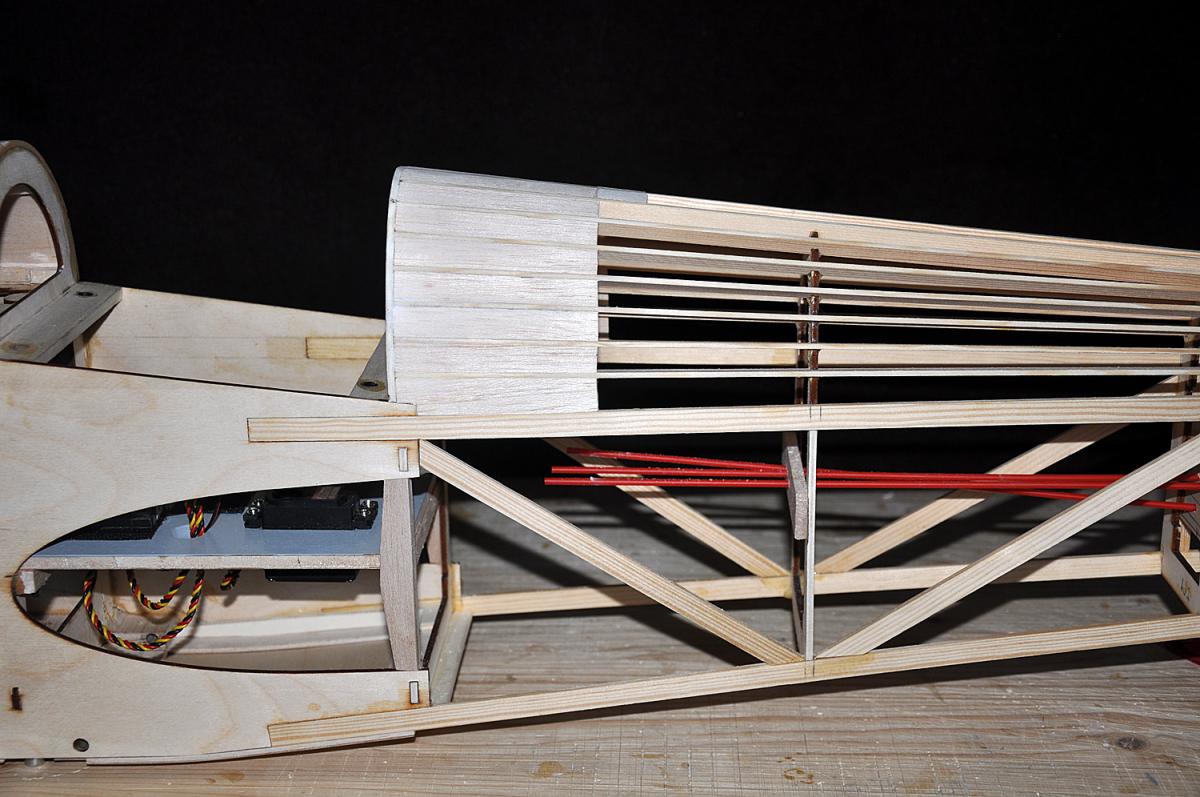
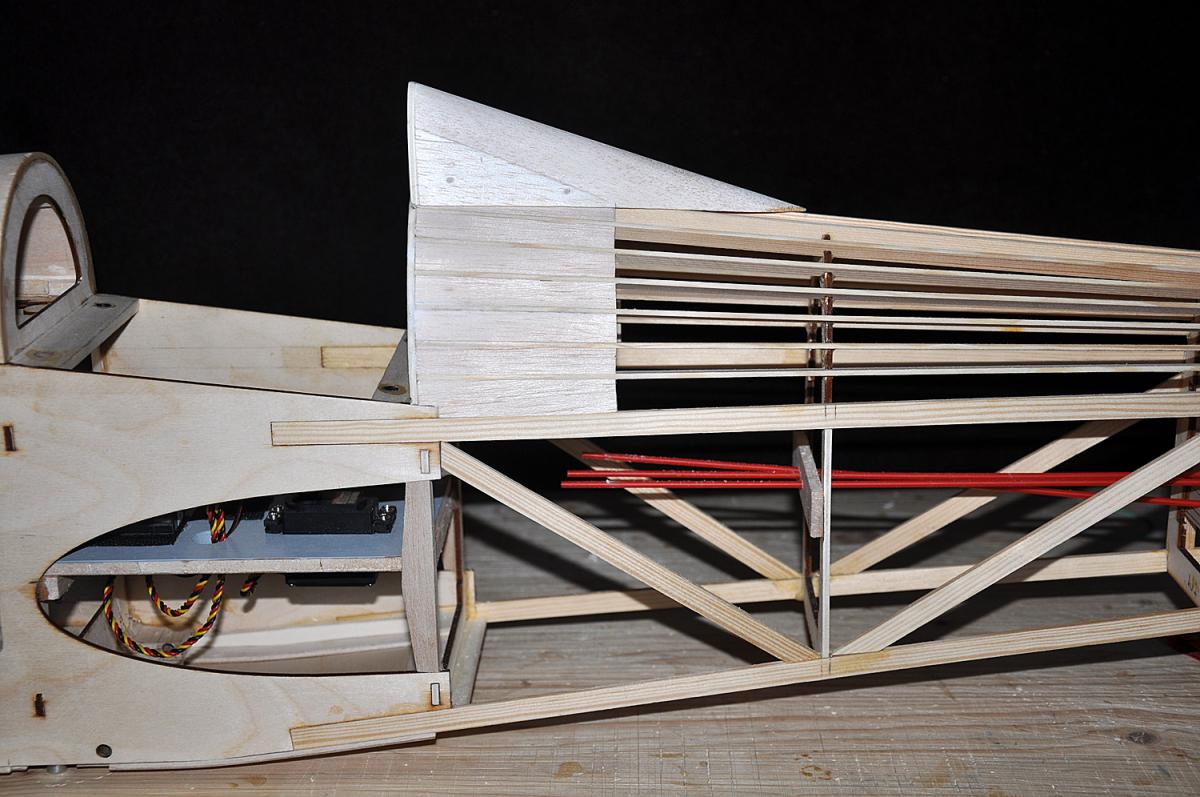
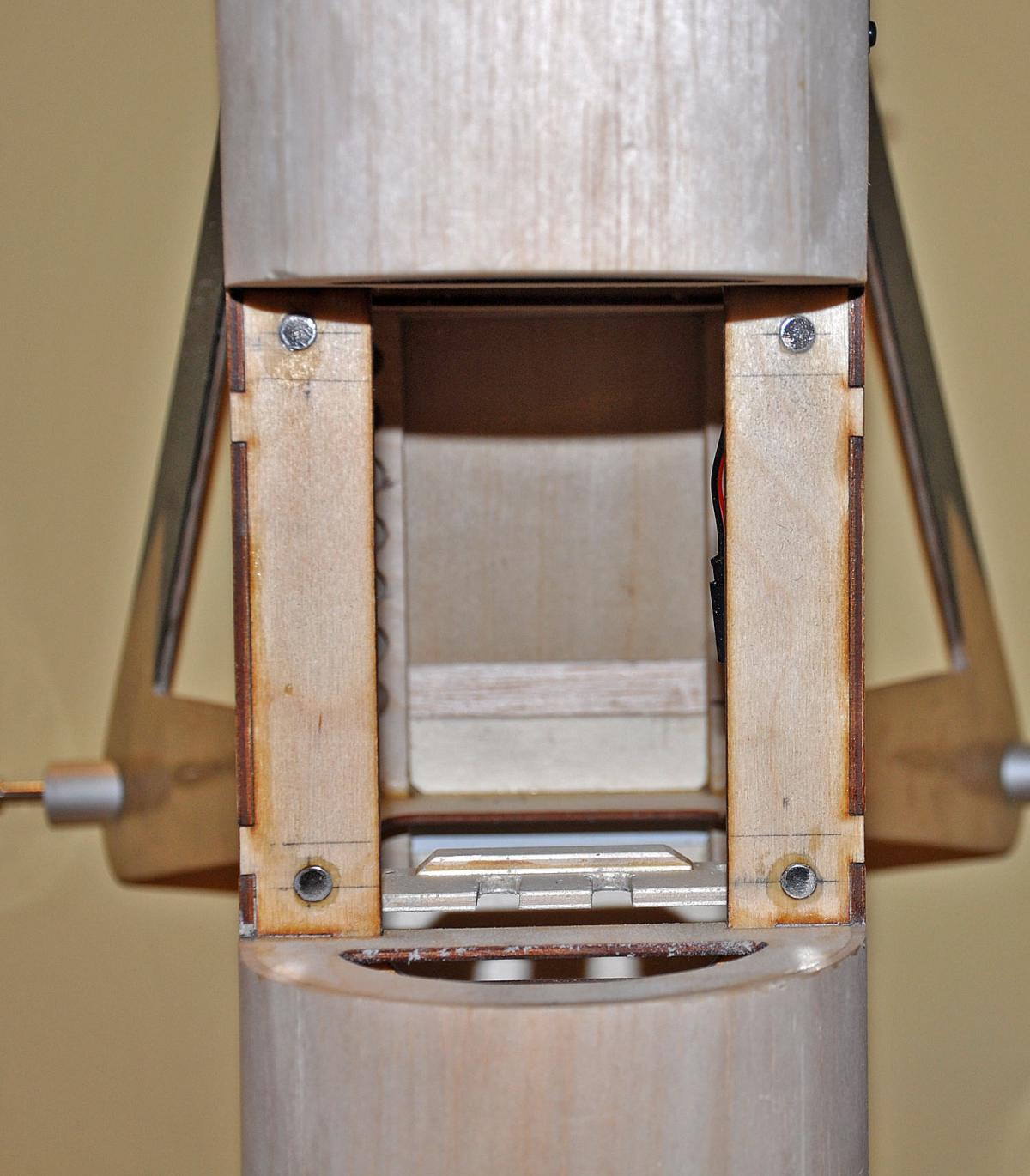
Parę zdjęć z aktualnego stanu modelu:
Widok od spodu modelu na zdejmowane pokrywy serwisowe
Miejsce wysuwanego segmentu między 2 i 3 wręgą
Sam segment
Kadłub w złożeniu
-
Żyroskop odczytuje położenie i przyśpieszenie ok. kilkanaście razy na sekundę. Stosuje przy tym matematyczną procedurę wyznaczającą trend, wyprzedzenie i uśrednienie.
Niestety przy włączonym żyroskopie, szczególnie gdy model jest lekki a warunki turbulentne serwa korygując odchylenia pracują bardzo intensywnie. Przekłada się to na zwiększone zużycie energii pobieranej z baterii odbiornika w locie nawet do 50% więcej niż bez włączonego żyra. Serwa też podlegają wyższemu obciążeniu mechanicznemu (szybciej się zużywają). Dlatego ja nie używam żyroskopów w locie a tylko przy starcie i lądowaniu i to tylko wtedy gdy model lub panujące warunki tego wymagają.
W jednym modelu Prząśniczce używam żyroskopu na lotkach w locie - możesz też obejrzeć i porównać ich pracę ze swoim modelem gdzieś w środku filmu kiedy pokazane jest ujecie na skrzydło. Wydaje mi się że lotki pracują spokojniej, bo to chyba większy i stabilniejszy 2 m model.
-
Masz rację. Ale PT17 ma całkiem spora powierzchnię SW. Ja w pierwszej wersji testera Piaggio dałem za mały SW i skończyło się jak się skończyło :-)
Przeważnie w modelach w stosunku do pierwowzoru powiększa się powierzchnie sterów od 10-20% - tak piszą w książkach
Skoro wysunięcie podwozia to taki dobry pomysł to dlaczego tego nie praktykuje się w fabrycznych zestawach ?! Moim zdaniem nie tędy droga. Obniżanie środka ciężkości w moim przypadku też niczego nie dawało.
Praktykuje się i to dość często - mam za sobą "popełnionych" więcej niż z 10 zestawów ARF.
dla porównania:
Oryginał
Model
PZL P.24 z wysuniętym podwoziem nie kapotował mi ani razu - za wyjątkiem przypadku udokumentowanego na filmie, ale kto przy zdrowych zmysłach ląduje w poprzek dość wąskiego lotniska - wychodzi że ja.
-
Piotrze, jak wiesz bawię się intensywnie żyroskopami i stabilizatorami i wg mnie to nie zadziała w przypadku natknięcia się na kępkę trawy. Skuteczność SW przy niskich prędkościach jest wiadomo jaka. Wysuniecie podwozia (i ewentualne jego obniżenie) to najlepszy pomysł.
Muszę Ciebie zmartwić Twój pomysł ze zmianą balastowania statku powietrznego zastosowano już w pierwszych sterowcach. Był to ciężar przesuwany na linie aby podnieść lub opuścić dziób sterowca.
A poważniej, obejrzyj koniec filmu z lądowaniem Stearmana PT17 (#202) - kółka malutkie i w osłonach , trawka już całkiem całkiem ale włączone żyro na SW pilnuje poziomego toru modelu do końca - widać tę walkę na filmie. :-). Gdybym nie włączył żyra byłby kapotaż.
-
-
Wiesz jak do tej pory wysunięcie podwozia zawsze pomagało. Jest jeszcze możliwość zastosowania żyroskopu na SW, który będzie ograniczał przechylanie się modelu do przodu w pewnych granicach i zrobi to szybciej niż pilot z najlepszym refleksem.







Historia pewnego modelu ;-)
w Filmy modelarskie
Opublikowano
Podoba się